











 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
En el contexto mundial, de acuerdo con el modelo de tendencias propuesto por Chefurka (2007), los combustibles fósiles aportan la mayor parte de la composición actual de la energía mundial, pero declinan rápidamente en el transcurso de la segunda mitad del siglo. Se espera que al final del siglo, el aporte del petróleo y el gas es casi nulo, y los jugadores dominantes son, en orden, la hidroenergía, las energías renovables, el carbón y la energía nuclear.
La importancia que puede adquirir la energía no convencional en México se observa por ejemplo, si consideramos que en el país existen 190 432 localidades con menos de 5 000 habitantes, de las cuales 6.9% (13 140 localidades) no cuentan con energía eléctrica, lo que representa una población aproximada de 2 236 295 personas que carecen de éste servicio (INEGI, 2010).
Entre las fuentes de energías renovables, la energía solar es la más importante, debido a su abundancia y sostenibilidad. Independientemente de la intermitencia de la luz solar, la energía solar está ampliamente disponible y completamente libre de costo (Kroposki and DeBlasio, 2000).
Los sistemas fotovoltaicos (FV) son sistemas de energía solar que producen electricidad directamente de la luz solar, estos producen energía limpia y confiable sin consumir combustibles fósiles y se puedan usar en una amplia gama de aplicaciones (Castellanos y Escobedo, 1980).
Los sistemas de aprovechamiento de la energía solar deben recoger la mayor cantidad posible de energía recibida en un determinado lugar, esta condición exige que la superficie colectora sea, en todo momento, perpendicular a los rayos solares y por lo tanto, una colección óptima solo puede conseguirse si dicha superficie está dotada de un movimiento de seguimiento del sol (López, 1985).Utilizando un colector con seguimiento, la energía total recibida en un día claro puede ser del orden de 35% mayor que para el mismo colector estático (Mosher et al., 1977; López, 1985), o hasta de 40% (Naaijer, 1985).
Las dos orientaciones más comunes de un sistema que sigue la trayectoria del sol para conseguir el mayor rendimiento posible de las radiaciones solares que inciden sobre una superficie o punto específico, son: en un eje para seguir al sol de este a oeste y en dos ejes que garantizan seguir siempre al sol de forma directa. El sistema de dos ejes es el mejor para aprovechar al máximo la radiación solar en todo momento, este sistema de seguimiento aprovecha tanto la radiación directa como la difusa (Madrid, 2009).
Abu-Khader et al. (2008) reportan un incremento global de alrededor de 30-45% en la potencia de salida para el sistema de seguimiento solar en eje norte-sur (N-S), comparado con un sistema FV fijo; además encontraron que el seguimiento solar en el eje N-S es el óptimo. Por su parte Huang et al. (2011) encontraron que en un día soleado un seguidor de un eje puede obtener 35.6% más de energía respecto a un sistema FV fijo.
Kacira et al. (2004) investigaron experimentalmente el efecto del seguimiento solar de dos ejes en la ganancia de energía comparada con panel fijo en Sanliurfa Turquía, y encontraron que la ganancia promedio diaria es de 29.3% en la radiación solar y 34.6% en la generación de potencia para un día particular de julio.
Se han propuesto varios métodos de ingeniería para lograr un seguimiento continuo del sol utilizando seguidores de un eje en bucle abierto (Kalogirou, 1996), de dos ejes en bucle cerrado (Lynch and Salameh, 1990) y de dos ejes en bucle abierto (Park et al., 1996). Existen diferentes controladores para implementar los sistemas de control, por ejemplo: matriz lógica programable (PAL) (Abouzeid, 2001), controlador lógico programable (PLC) (Abdallah and Nijmeh, 2004), PC (Yousef, 1999) y microprocesadores (Koyuncu and Balasubramanian, 1991).
No hay referencias bibliográficas acerca de la eficiencia de los seguidores solares en México, por lo cual el objetivo del presente trabajo fue el diseño, construcción y evaluación de un sistema de seguimiento solar de dos ejes, implementando un sistema de control por microprocesador para un panel fotovoltaico automatizado, que fuera funcional para la totalidad del territorio mexicano.
Materiales y métodos
El proyecto de investigación se realizó en las instalaciones del Campus Montecillo del Colegio de Postgraduados, ubicado en el municipio de Texcoco, Estado de México, que se encuentra en la 19° 27' 38" latitud norte, longitud oeste 98°54'01" y altitud: 2 250 msnm. La incidencia de radiación solar en la región es en promedio de 5.5 kWh m-2 día-1 (Castellanos y Escobedo, 1980; SEI, 2007).
Se diseñó y construyó un sistema mecánico-electrónico para optimizar el proceso de captación de energía solar para su conversión en energía eléctrica, orientando de manera automática paneles solares en dirección de mayor incidencia de radiación, durante el periodo de agosto de 2011 a noviembre de 2013.La evaluación del rendimiento energético del seguidor solar se realizó el 3,4 y 5 de febrero de 2014, fueron días completamente despejados.
Diseño. De acuerdo a la metodología propuesta por Bastida y Rabelo (2009), se comienzo con la identificación de una necesidad, que se debe expresar de la manera más clara y concreta posible, ya que de este modo es más fácil definir cuáles son los problemas principales a los que nos enfrentamos para satisfacer dicha necesidad. Una vez definidos los problemas que habrá que solucionar se proponen y definen los sistemas y estructuras que conformaran la máquina que se diseñara para satisfacer la necesidad básica, lo cual implica establecer la función básica que desempeñaran, para lo cual se debe realizar un proceso de generación, evaluación y selección de alternativas. Enseguida se establecen subfunciones y se eligen sus principios de solución. Finalmente se describe el concepto final y se procede al diseño de detalle.
Diseño de detalle y construcción. El diseño de detalle se realizó a partir de la necesidad de especificar completa, y detalladamente los elementos recomendados para la manufactura del producto. En esta etapa se obtuvieron los planos finales de la maquina por lo que se tomó en cuenta los métodos de diseño para el ensamble y la manufactura.
Esta etapa permitió conocer mediante cálculos las características, así como el dimensionamiento de los sistemas y/o componentes del dispositivo de seguimiento solar fotovoltaico (DSSF). Fue necesario para el diseño de algunos sistemas, proponer variables a criterio para poder utilizar las diferentes ecuaciones que permiten hacer los cálculos requeridos. Debido a esto se puede observar que el diseño es un proceso iterativo que permite retroalimentar y hacer las modificaciones que se requieran, ya sea por restricciones propias para el diseño o por cuestiones de fabricación, estética, seguridad, normas, etc.
Metodología de evaluación. Se construyó una caja de sensores para medir la corriente (Icc) de salida del panel fijo y del móvil, se utilizaron sensores tipo ACS712 (marca Allegro MicroSystems Inc., Massachusetts, USA). Los sensores se calibraron comparando los datos obtenidos por un multímetro convencional tipo FU0233 (marca Fulgore) y por un datalogger tipo CR1000 (marca Campbell Scientific, Utah, USA), para obtener las ecuaciones de funcionamiento de los sensores.
Se probó el DSSF, con tres intervalos de tiempo discretos cada 5, 30 y 60 min de programación, se registraron los valores de tiempos de operación de motores con un circuito de adquisición de datos que se integró al Control, y se midió los valores de corriente con los sensores que se registró en el datalogger tipo CR1000, marca Campbell Scientific, Utah, USA, y el panel de referencia fijo se colocó con una inclinación de 34° con respecto al horizonte.
Para calcular los valores de potencia que se generó por los paneles (DSSF y fijo), se consideraron valores de voltaje constantes de 22.3 V (Vca), según las especificaciones del fabricante del panel solar.
Resultados y discusión
A continuación se describen cada uno de los componentes que se diseñaron para la construcción del dispositivo de seguimiento solar fotovoltaico (DSSF).
Estructuras de soporte. Las estructuras de soporte principal y del panel solar se diseñaron para brindar firmeza estructural al seguidor, soportar los sistemas de movimiento, y ofrecer puntos de unión y agarre de los mismos. Se usaron perfiles estructurales de un material y dimensiones adecuadas, con ensamble de tornillería, alta firmeza estructural, elevada estabilidad (bajo centro de masa) y costos razonables.
Para la construcción de la estructura principal, se utilizó un elemento soportado por cuatro patas iguales de acero 1018 PTR 50.8 mm, las cuales son plegables para una mejor movilidad. Se utilizaron cuatro piezas de PTR 25.4 mm para dar tensión a las patas del soporte principal. Se diseñó una pieza de solera de acero 1018 de 50.8 x 6.35 mm para unir las cuatro patas y permitir el desplazamiento que produce el pliegue de las mismas. Para la unión de todas las partes se utilizaron tornillos, tuercas y rondanas. Para elevar o bajar el dispositivo según se requiera se utilizó un perfil igualmente de acero PTR 44.45 mm.
Estructura de soporte del panel solar. Se construyó la estructura soporte del panel en forma de H, girada 90 grados, se utilizó un perfil de aluminio anodizado perfil tipo 8 40 x 40
E de 40 x 40 mm. Las piezas del perfil se unieron mediante elementos de aluminio en forma de L de 38.1 x 38.1 mm, tornillos y tuercas especiales.
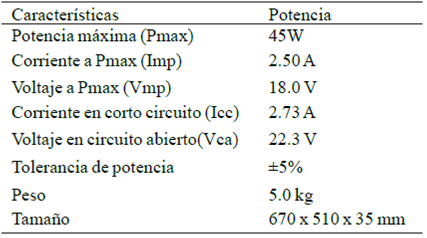
Sistema de captación de energía. Se utilizó un panel solar modelo DS-A1-45 (marca DASOL, Zhejiang, China), cuyas características se muestran en el Cuadro 1.
Se instaló un regulador de carga marca ENESOL (Estado de México, México), con una entrada para el panel solar y salidas para las baterías y para las cargas (aparatos eléctricos de corriente directa). Se conectaron tres baterías marca ENESOL (Estado de México, México) modelo UN 12-12 (12 V y 12 Ah) encargadas de almacenar la energía eléctrica generada por el panel solar, para el uso tanto para el accionamiento del seguidor solar, como para otras aplicaciones.
Sistema de control del movimiento. El sistema de control del movimiento sirve para obtener los valores (ángulos) que determinaran el movimiento (azimut y elevación solar) del panel solar, y mediante la fase de potencia lograr el accionamiento de los motores. El requerimiento principal en el cual se basa este sistema es el de posicionamiento automático del panel. Se tomó en cuenta las dimensiones de la caja de control (gabinete) principalmente, tener un bajo consumo energético y bajos costos de construcción. La Figura 1 muestra los componentes y conexiones del sistema de control.

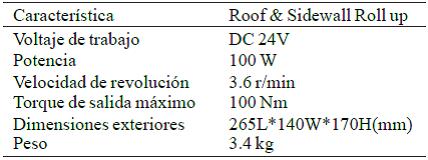
Motores. Para el movimiento horizontal y vertical del panel se utilizaron dos motores modelo ERU-B2 marca Beijing Fenglong Greenhouse Technology Co. (Beijing, China). Las especificaciones técnicas de los motores se indican en el Cuadro 2.
Software. Para determinar la orientación (azimut y elevación solar) del panel por medio del sistema de seguimiento solar, se calculó el movimiento del sol respecto a un punto en la superficie terrestre, de acuerdo al algoritmo propuesto por Walraven (1978). El algoritmo que originalmente esta codificado en lenguaje de programación FORTRAN, se convirtió al lenguaje Visual Basic 6.0.
Se realizaron diversos ajustes al algoritmo para calcular el movimiento del sol desde la salida hasta la puesta del sol durante todos los días del año. Los ajustes incluyen: la determinación de los años bisiestos, el cálculo del día de la semana, la activación del horario de verano, el ajuste de las coordenadas azimutales (N= 0° y S= 180°), que el software solamente genere valores de azimut y elevación positivos entre alba y el ocaso del sol, entre otros. La interfaz de la aplicación requiere los siguientes datos de entrada: año, zona horaria, latitud y longitud (en grados, minutos y segundos).La ejecución de esta aplicación genera un archivo con extensión .TXT.
Las longitudes máximas y mínimas de la República Mexicana se determinaron con ayuda del software Google Eart, son la siguientes: 1) norte: 32° 43' 6.49" latitud norte y 114° 43' 16.44" longitud oeste; 2) sur: 14° 32 '27.00" latitud norte y 92° 13' 7.65" latitud oeste; 3) este: 21° 12' 5.86" latitud norte y 86° 42' 36.99" longitud oeste; y 4) oeste: 29° 8' 46.87" latitud norte y 118° 27' 24.00" longitud oeste. Con las coordenadas límites y las fechas de equinoccios y solsticios se ejecutó el programa creado, y se compararon los resultados con el software proporcionado en la página web "http://www.sunearthtools.com/" quien también utiliza las ecuaciones con que han sido creadas las tablas del American Ephemeris y el Nautical Almanac.
Control. Se desarrolló un dispositivo de control para realizar las siguientes funciones: recabar los datos de entrada para el programa, realizar las mismas operaciones de cálculo que el software para accionar los motores que moverán el panel FV, mostrar resultados y guardarlos en una unidad de almacenamiento externa tipo USB. A este dispositivo se le denomino "control". Los componentes principales del control son: placa base, microcontrolador (PIC18F4553), teclado matricial, display, reloj, leds, fase de potencia (2 puentes H electromecánicos y un circuito integrado UNL 2803), conector o terminal de red RJ45, grabador de memorias USB, conectores (4 piezas), carcaza de plástico (Figura 2).
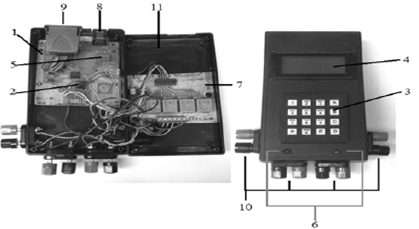
Figura 2 Control abierto (izq.) y cerrado (der.), 1) placa base; 2) microcontrolador; 3) teclado matricial; 4) display; 5) reloj; 6) leds; 7) fase de potencia; 8) conector terminal de red; 9) grabador de memoria USB; 10) conectores; y 11) carcasa.
Se convirtió y adaptó el código en Visual Basic 6.0.al lenguaje de programación C, mediante el software PIC C Compiler, para grabarlo en el microcontrolador con el software PIC-PROG II y el dispositivo "módulo cargador/ programador de microcontroladores PICs, para puerto USB". Debido a que el microcontrolador del control tiene una capacidad de procesamiento de 8 bits, se produjo un error de 0-3 grados en el cálculo de las variables altura y azimut, respecto a los datos obtenidos en Visual Basic 6.0 con un sistema operativo de 32 bits. Se consideró el error como aceptable debido a que no provocara pérdidas significativas en la captación de energía.
Topes de seguridad. Se instalaron dos switches de contacto conectados al motor que se encargó de la elevación solar; para evitar que la barra que sostiene el soporte del panel gire más de lo debido y provoque ruptura de elementos o mal funcionamiento del sistema de control y del sistema de transmisión.
Guardamotor y breakers. Cuenta con un sistema un guardamotor tipo MS116-10 (marca ABB, Zurich, Suiza) y dos Breakers tipo WMZS2B07 (marca EATON, Ohio, USA) para interrumpir las corrientes de entrada y de salida del Control, con el fin de realizar operaciones de mantenimiento y en éste caso durante la evaluación del sistema de seguimiento solar.
Sistema de transmisión. Este sistema sirve para transmitir la potencia de cada uno de los motores a los engranes motrices del soporte del panel solar, para realizar el movimiento del mismo de acuerdo a los requerimientos. Para el diseño del sistema se tomaron en cuenta: el posicionamiento automático, las dimensiones correspondientes, firmeza estructural y viabilidad económica.
Se diseñó una relación de transmisión para que por cada segundo, del motor se obtengan 1.02 grados de giro del soporte del panel (Figura 3).
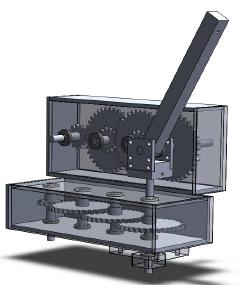
Descripción del concepto final. El concepto final del seguidor solar llamado Dispositivo de Seguimiento Solar Fotovoltaico (DSSF) (Figura 4), toma en cuenta prácticamente todos los requerimientos principales así como problemas esenciales que se plantearon en la metodología de diseño. El DSSF se compone de tres sistemas, un subsistema, y dos estructuras de soporte. La estructura principal va a soportar la totalidad de sistemas y estructuras. Primeramente sostiene a la caja (gabinete) del sistema de control del movimiento, luego en la parte superior se le acopló el sistema de transmisión, quien a su vez soporta y mueve a la estructura de soporte del panel, y por último el sistema de captación de energía y almacenamiento está distribuido principalmente en la estructura de soporte del panel y la caja del sistema control del movimiento.

Cabe señalar que el subsistema de medición de la energía captada se relaciona con el sistema de captación de energía y almacenamiento por lo que también se incluye en la caja del sistema de control principalmente. Otro punto importante es que los motores pertenecientes al sistema de control del movimiento estarán soportados por el sistema de transmisión. Por lo que el DSSF no se puede mirar como partes separadas, sino como un sistema general.
Evaluación energética. A continuación se presentan las comparaciones en términos de eficiencia del DSSF con el panel fotovoltaico fijo, en todos los casos. El primero resulto observar que entre las 11:00 y 14:00 las curvas de captación de energía de los paneles con seguidor y fijo se aproximan (Figura 5). Los resultados son congruentes con los reportados por Gonzales (2006), quien reporta que durante las horas cercanas al medio día solar las curvas de producción de energía un panel fijo y el seguidor se aproximan.
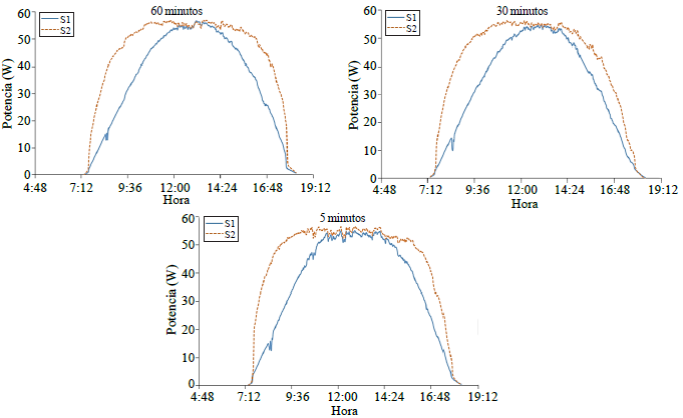
Figura 5 Comparación de potencias generadas por el panel fijo (S1) y el DSSF (S2), movimiento cada 60, 30 y 5 min.
La corriente de corto circuito máxima medida por los sensores fue de 2.89 A, la cual es superior con 0.16 A a la indicada en la etiqueta de especificaciones del fabricante del panel solar, esto puede deberse a que las condiciones climáticas durante la evaluación fueron diferentes a las condiciones de prueba normalizada (STC Standar Test Conditions), que son de 1000 W m-2 de radiación y 25 °C de temperatura en la celda (SEI, 2007). Esta diferencia no afecta en gran medida los resultados.
Del Cuadro 3 se observa que la energía total diaria consumida es muy similar en las tres pruebas, lo que quiere decir que a pesar de que los intervalos de movimiento del DSSF son diferentes, éste consumirá casi la misma cantidad de energía. El consumo total diario solo variara a lo largo del año dependiendo de ascensión recta y declinación solar. También se observa que el DSSF obtuvo una mayor ganancia final de energía si se mueve cada 60 min, seguido del que se orienta cada 30 y 5 min, con valores de 27.98, 26.81 y 26.27% respectivamente, respecto al panel fijo.
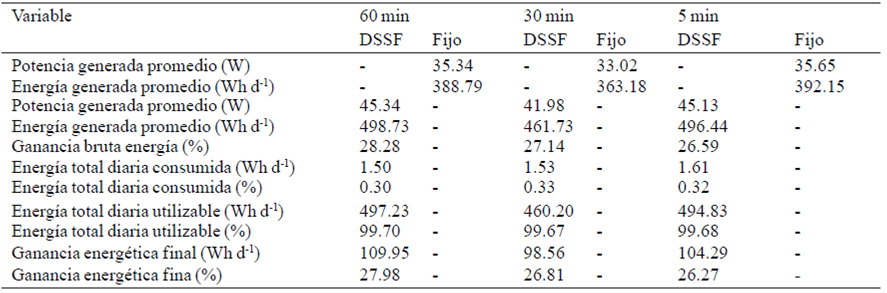
La disminución en la captación de energía al disminuir el intervalo de operación del sistema puede deberse a diversos factores como: el incremento en la temperatura de las celdas debido un aumento en la radiación solar incidente sobre ellas y por consiguiente una disminución en el voltaje de salida, a un incremento en la temperatura ambiente, cuestiones relacionadas a los límites Intensidad de corriente-Voltaje de operación del panel solar, o a otros factores como sombras, humedad relativa, partículas suspendidas en la atmosfera, velocidad del viento, etc (SEI, 2007).
Abu-Khader et al. (2008) reportan un incremento global de alrededor de 30-45% en la potencia de salida para el sistema de seguimiento solar en eje norte-sur (N-S), al comparar con un sistema FV fijo; mientras que Huang et al. (2011) encontraron que en un día soleado un seguidor de un eje puede obtener 35.6% más de energía respecto a un sistema FV fijo; y Kacira et al. (2004) encontraron que la ganancia promedio diaria es de 29.3% en la radiación solar y 34.6% en la generación de potencia para un día particular de julio en Sanliurfa Turquía de un seguidor solar de dos ejes respecto a un panel FV fijo. Estos resultados son mayores a los resultados obtenidos en esta investigación, lo cual puede deberse a el lugar y la época del año, a que los dispositivos utilizados en la medición de corrientes y voltajes fueron diferentes, a los métodos de cálculo y debido a que los cálculos en el presente trabajo tomaron en cuenta un factor de corrección por temperatura (SEI, 2007).
Para la prueba de movimiento cada 60 min, el seguidor solar gasta 1.36% de la ganancia final de energía para su operación, lo que significa que casi la totalidad de la energía producida dado la implementación del sistema de seguimiento solar. Es útil para otras aplicaciones.
De la Figura 6, se observa que el DSSF aumenta las horas de operación con un rendimiento mayor al nominal (45 W) de 5 h en el caso del panel fijo y hasta 8 h en el caso del panel con seguidor, estos valores pueden cambiar a lo largo del año.
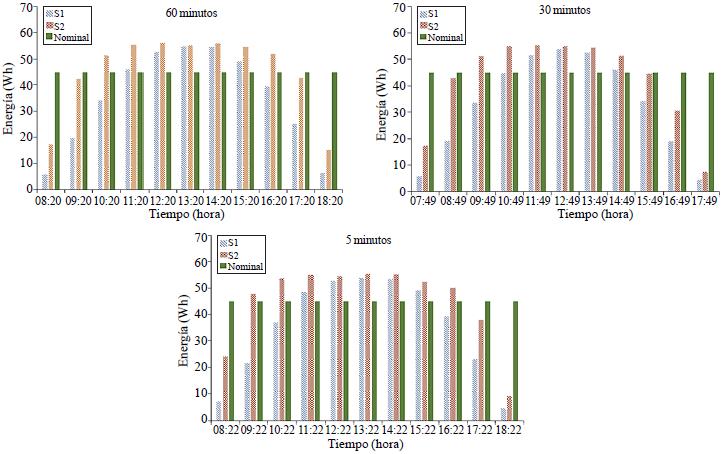
Figura 6 Energía horaria generada por el panel fijo (S1) y el DSSF (S2) en comparación con la capacidad nominal de los paneles según especificaciones del fabricante, movimiento cada 60, 30 y 5 min.
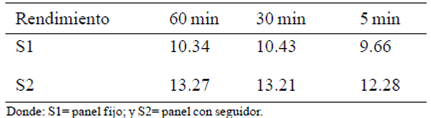
Como se observa en el Cuadro 4, se determinó que el rendimiento del panel solar fijo con respecto a la radiación solar global (ISR) (1 000 W m-2) (SEI, 2007) es menor al rendimiento reportado en las especificaciones del fabricante del panel solar utilizado (12%) (DASOL, 2012). Mientras que el panel con seguidor obtuvo 13.27% de rendimiento en la prueba de movimiento cada 60 min, lo que indica que el sistema de seguimiento solar aumenta el rendimiento del panel en 1.27% del valor del rendimiento nominal de los paneles respecto a la ISR, y 2.93% respecto al rendimiento del panel fijo.
Conclusiones
El software que se desarrolló resultó funcional para la totalidad del territorio de la República Mexicana y durante todo el año, ya que los datos de salida tanto de altura como azimut solar tienen una diferencia menor a 1 grado en la mayoría de los casos, respecto a los datos que proporciona el software de http://www.sunearthtools.com/; que permitió el diseño del DSSF.
El DSSF que se construyó permitió seguir el movimiento de sol automáticamente en el eje horizontal y vertical, el cual se acopló a un panel fotovoltaico para mejorar su eficiencia en la captura de la energía solar.
El mejor rendimiento energético se obtuvo cuando el seguidor solar se orientó al sol cada 60 minutos. Respecto a la energía generada por un panel fijo, el seguidor solar que se orientó cada 60 min produjo hasta un 27.98 % más de energía, con un gasto energético del 0.3 % de la energía total generada o lo que es igual a un 1.3 % de la ganancia energética final. Al comparar la producción de energía del sistema con la ISR, éste llega a aprovechar hasta un 13.27 % de la energía disponible, o en otros términos, un 2.93 % más respecto al panel fijo.

