










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista mexicana de ciencias agrícolas
versión impresa ISSN 2007-0934
Rev. Mex. Cienc. Agríc vol.3 no.spe4 Texcoco nov./dic. 2012
Implementación de riego a precisión en un sistema de pivote central
José Andrés León Mostacero1§, Héctor Flores Magdaleno1, Roberto Ascensio Hernández1
1 Posgrado de Hidrociencias. Colegio de Postgraduados en Ciencias Agrícolas. Carretera México-Texcoco km 36.5. C. P. 56230. Montecillo, Texcoco, Estado de México. (mhector@colpos.mx; ascenciohr@colpos.mx). §Autor para correspondencia: jaleon@colpos.mx.
Resumen
La investigación se desarrolló en el pivote central del Colegio de Postgraduados en Ciencias Agrícolas, campus Montecillo. El objetivo fue diseñar, construir, implementar y evaluar un prototipo de riego diferenciado. La metodología consistió en: 1) sistema de control de riego electromecánico que fue la ubicación del prototipo, cableado e instalación de ocho electroválvulas; 2) sistema electrónico consistió en la elaboración de dos tablillas electrónicas, integración de GPS, dispositivos de comunicación con la computadora y control de válvulas; 3) desarrollo del software basado en la comparación de los datos obtenidos por el GPS con un mapa establecido -zonas "homogéneas" de riego- a lo largo del recorrido de las ocho últimas salidas del pivote central; y 4) evaluación del sistema de riego se basó en la comparación de la cantidad de agua aplicada (ordenada por el programa) y el agua colectada a nivel del suelo. Los resultados obtenidos fueron: a) diseño e implementación de un sistema de riego a precisión que permite la operación de electroválvulas en función al geoposicionamiento; b) elaboración de un programa de riego diferenciado abierto y adaptable a cualquier equipo de rodamiento circular (pivote central), bajo cualquier criterio de programación de variabilidad del suelo o desarrollo y crecimiento del cultivo; c) adaptación de un sistema de riego electromecánico de control individualizado de ocho salidas; d) la diferenciación del riego permitió un ahorro de 39.09% de agua en comparación con la aplicación uniforme, para las condiciones de operación del pivote central bajo estudio; y e) la variación entre la lámina aplicada y colectada fue 8.41%.
Palabra clave: riego de control automático, riego en tiempo real, riego de tasa variable.
Introducción
La concepción de riego hoy en día difiere de la que se tenía 20 años atrás, que consistía en la aplicación del agua suplementaria a la obtenida de la lluvia, mientras que en los años recientes se define como "un medio artificial de aplicar agua a la zona radicular de los cultivos de forma que ésta pueda ser utilizada al máximo".
El riego a precisión incluye la exactitud en volumen y tiempo de aplicación de agua, impactando en el incremento de la rentabilidad de la cosecha, y disminuyendo el riesgo ambiental (Ortega, 2008). Es una metodología que consiste en procedimientos sencillos para la aplicación de agua al suelo de manera diferenciada a un cultivo. Emplea tecnologías de punta como los sistemas de posicionamiento; de medición y monitoreo de propiedades de suelo, condiciones de cultivo y clima en tiempo real; uso de información de sensores remotos y satélites; aprovechamiento y desarrollo de software para procesar información que facilite la toma de decisiones; implementación de sistemas de control automático que permiten monitoreo remoto vía internet; evaluación mediante mediciones periódicas y "exactas" de desarrollo; y rendimiento de cultivos como fin principal (Balastreire, 2001).
La relación entre una acción simple como el riego (dentro de un sistema de producción moderno) con temas como la precisión, exactitud, adelantos tecnológicos, sistemas de comunicaciones, y la transversabilidad de ciencias: electrónica, electromecánica, inteligencia artificial, robótica, cada vez es menos raro, considerando un enfoque de sistemas y en el que se van incorporando actores y procesos que lleven a incrementar la cantidad y calidad de las cosechas, a través de facilitar, hacer eficiente y agilizar los procesos productivos en la agricultura, y además favorecer de manera positiva en el cuidado del ambiente.
Desde 1990 se está trabajando en la modificación de equipos de riego móviles (pivotes centrales y avances laterales), para hacer riego diferenciado, en función a la medición y monitoreo de un sin número de variables de suelo y cultivo. Estas investigaciones se vienen realizando en países de la Unión Europea y EE. UU., así como en países latinoamericanos como Argentina, Brasil, Chile y México.
El presente documento contiene una propuesta de riego diferenciado, que incluya el diseño, construcción, implementación, operación y evaluación de un prototipo capaz de aplicar agua en forma eficiente y eficaz a los cultivos. Los objetivos específicos son la elaboración del programa de riego en función a la variación espacial de la humedad del suelo y desarrollo del cultivo, adaptación de un sistema de control de aplicación de riego diferenciado en función a los requerimientos del cultivo, y la evaluación comparativa entre el riego diferenciado y la aplicación de láminas uniformes.
Materiales y métodos
Ubicación
El proyecto de investigación se realizó en el Campo Experimental del Colegio de Postgraduados en Ciencias Agrícolas, campus Montecillo que se localiza en el km 36.5 de la carretera federal México-Texcoco, Texcoco, Estado de México a 19° 28' 00'' de latitud norte; 98° 54' 20" de longitud oeste y 2 245 msnm. Las evaluaciones se realizaron en los lotes 17 a 20 del bloque E y F, donde opera el equipo de riego "pivote central", como se muestra en la Figura 1.
Materiales
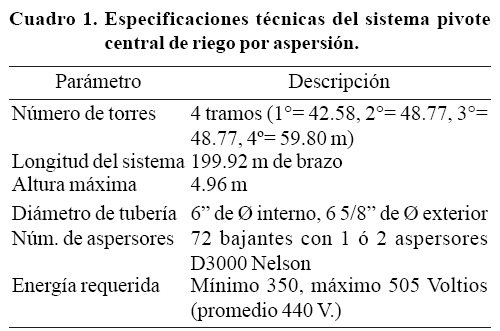
El equipo de riego es un pivote central y consiste en una estructura de tubos y ángulos de acero galvanizado acoplado al sistema de rodamiento, alineación, energía eléctrica y operación (Cuadro1 y Figura 2).

Para el diseño y construcción del sistema de riego a precisión se usaron diferentes tipos de materiales, los cuales fueron adquiridos en el mercado local o confeccionados a partir de otros, tales como electromecánicos y componentes electrónicos especializados.
Método
Sistema de control de riego electromecánico. Se inició con la localización de control o cabezal, que se ubicó junto al sistema de encendido y apagado de rodamiento de la cuarta y última torre, por la cercanía del abastecimiento de la energía eléctrica, evitar la interferencia del funcionamiento del GPS, facilitar el cableado a cada electroválvula y aprovechar una base fija incorporada al sistema de riego (Figura 3).

Posteriormente, se hizo el cableado (cable de uso rudo núm. 18) desde el sistema de control a cada una de las electroválvulas con la finalidad de tener un control individualizado de cada salida. Se aprovechó el cable adjunto que conduce la energía del panel central del pivote y las mangueras bajante para fijar el cable. La longitud total para la conexión a ocho válvulas equidistantes en 2.7 m y con el sistema de control intermedio fue de 90 m.
Las válvulas utilizadas fueron de la marca NaanDanJain de diámetro interno de % de pulgada, regulador de flujo y seguro manual de operación, con conexión hembra ambos lados, operada con 24 voltios y una presión máxima de operación de 10 bar (145 psi) (NaanDanJain, 2012). Estas electroválvulas se ubicaron en cada bajante de las ocho válvulas en operación, antes de la "T" de distribución, regulador de presión y sistema de rociado de las salidas (Figura 4).

Sistema electrónico. Se inició con la ubicación del GPS LS20031 (Electronics, 2012a) y la adaptación de cinco cables soldados a la tablilla construida. El GPS se puso expuesto en la parte superior para facilitar la ubicación de satélites y evitar interferencias.
El GPS LS20031 es un completo receptor de antena inteligente que incluye circuitos de flujo de información, es de bajo costo, genera una asombrosa cantidad de información de la posición a una velocidad de cinco veces por segundo. Su tecnología Locosys ha sido probada para hacer un seguimiento de hasta 66 satélites o torres de corrección en tierra. La navegación y la actualización lo hacen con bajo consumo de energía (Electronics, 2012b). No tiene un conector unido, al obtener los datos de la unidad necesita conectar algunos cables a un dispositivo de almacenamiento y display, para mantener la antena de cerámica cuadrada hacia el cielo.
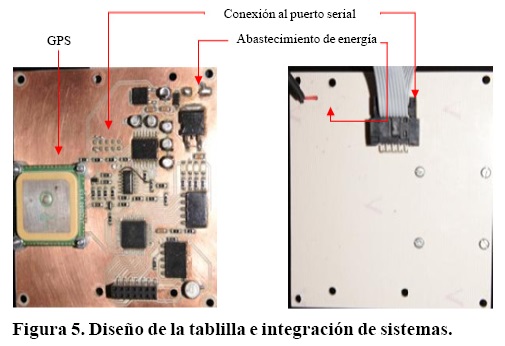
La tablilla construida en bronce (Figura 5) integra el GPS, punto de comunicación (puerto serial) para conexión a la computadora, abastecimiento de energía con una intensidad de hasta cinco voltios que puede ser dado por un puerto serial de la computadora con el uso de un adaptador de 110 a 5 voltios y la conexión de la tablilla a la pantalla digital.
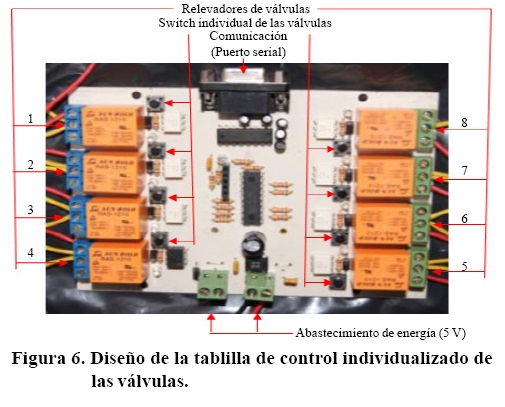
Los circuitos de la tablilla 1 se conectaron a una tablilla 2 (Figura 6) vía puerto serial, donde recibe la información de la computadora para la operación de las válvulas. La tablilla 2 desarrolló los circuitos para la operación de cada válvula en forma independiente, estuvieron conectados al switch de cada control obteniendo la potencia necesaria para el cierre y apertura.
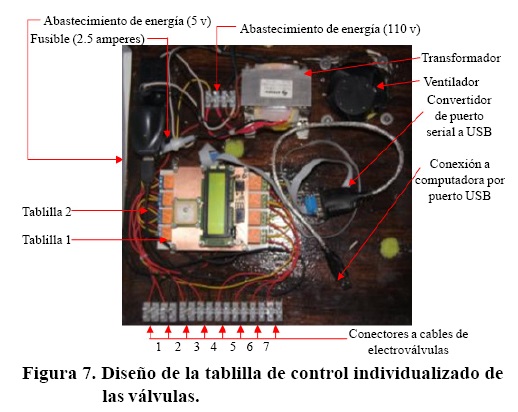
Para el funcionamiento del prototipo se consideraron accesorios como un convertidor de conexión serial a USB (para hacerlo funcional con los equipos de computo actuales); transformador de energía de 110 v a 24 v. (energía necesaria para la operación de válvulas); accesorios de seguridad como un fusible para evitar sobre cargas de energía; un ventilador para evitar calentamiento de todo el prototipo; computadora que es necesario dejar junto al equipo de riego mientras opera; y caja de protección hecha en policarbonato y reforzada con marco de hierro para evitar contaminantes -como el polvo- y evitar la interferencia con el GPS (Figura 7). Todo este prototipo fue montado en el pivote central aprovechando una base perforada integrada al brazo de riego junto a la caja de control de la torre 4, en esta se emperno la base del prototipo asegurando su fijación.
En la Figura 8 se describe el flujo de información y energía de los componentes del sistema. La información que se obtuvo por el GPS se transmitió a la tablilla 1 y a su vez a la computadora. Por otro lado, se definieron zonas "homogéneas" que determinaron el riego diferenciado, los datos generados fueron procesados e integrados al programa. Después de la comparación de la posición del GPS con el mapa pre-establecido envió la orden de tiempo de apertura y cierre de válvulas según el agua que se requirió a la tablilla 2, esta recibió la información del tiempo y envió el impulso a los relevadores, los cuales tenían la energía necesaria para operar las válvulas.
De la tablilla 2 regresó el cálculo de tiempo de las válvulas abiertas, para el control de apertura. En este caso, la energía fue tomada de la estructura del pivote en su sistema de control de la torre 4, de 110 voltios y fue variada a 24 voltios mediante un puerto USB para el funcionamiento voltios para la operación de las válvulas o usada para de las tablillas y por ende para el GPS, y su respectivo el funcionamiento de la computadora, la que dio 5 display.
Software del sistema de riego. El programa fue desarrollado en Phyton versión 2.7.3 (Python, 2012), para ello se utilizó las librerías de imágenes de Phyton, PIL versión. 1.1.7 (Phyton, 2009) y del software como el PyQt versión 4.8 (Limited, 2007), librerías para soportar conexiones a puertos seriales como Pyserial (Phyton, 2010), y compiladores como el Py2.exe (Phyton, 2007). Para facilitar la programación se escribió el código en el programa de apoyo Aptana Studio 3 versión 3.1.3 (Appcelerator, 2009) (Figura 9).
El Software se inició con la creación de la forma gráfica o pantalla del programa, que fue importada a Python, para realizarlo se activaron las librerías de imágenes, funciones matemáticas, puerto serial y tiempo. También se declararon las variables a usar y se encendió el puerto serial para conectar a la computadora, y a su vez se solicitó la operación de objetos.
El cuerpo del programa se definió en 3 tiempos o sub rutinas: la primera fue la definición de los ciclos de riego mostrados en la pantalla 4. La segunda muestra una imagen de barra en la pantalla 1 o principal que indica la actualización del programa cada segundo, que es el tiempo cuando el programa solicita una nueva posición al GPS. La tercera hace la comparación de la posición del GPS con el mapa diferenciado, para esto es necesario la creación de la tabla de áreas, es decir el límite de las zonas donde cambia el patrón de ciclos de riego y el ancho de acuerdo al porcentaje de error (franja) que se considere.
Para que los puntos sean tomados en cuenta es necesario la creación de dos tablas: la "tabla de datos" especifica la coordenada de cambio de los límites de cada sección, y la "tabla de riego" define el ciclo de riego adoptado para cada sección y por cada electroválvula. Obtenidas las tablas de datos, de riego, y la del GPS son convertidas en archivos de extensión .kml, que son mostrados en el programa Google Earth. El GPS tiene la capacidad de actualizar su posición a medida que obtiene el nuevo dato de su ubicación (1 segundo).
Al cierre del programa se completa la impresión de la latitud, longitud, hora, sección de riego, la sumatoria del tiempo de apertura de cada válvula y hora exacta de inicio y fin de riego en una tabla de texto y archivada con el nombre que coincide con el año, mes y día del riego.
Evaluación del sistema
Medición del gasto de los aspersores. Para esta medición se escogió una sección con riego de ciclo completo, es decir las válvulas siempre estuvieron abiertas. Luego se colocó una bolsa plástica transparente en cada uno de las boquillas de 0.6 * 0.4 m de la que se le corto una esquina, para que el agua saliera en forma de chorro. Después de establecerse la presión de salida del agua a 18 PSI se colectó en una cubeta de 12 L, anotando el tiempo que demoraba en llenarse dicho recipiente, esta actividad se hizo por cinco ocasiones en cada uno de los ocho aspersores en estudio (ocho salidas). De los datos obtenidos se calculó el gasto por salida en l/s para las ocho salidas a una presión de 18 PSI (León, 2008).
Medición de la lámina aplicada. Se midieron distancias de 21.50 m aproximadamente, tomando como guía la rodada de la torre 4 de pivote central y se colocaron "canaletas pluviométricas" alternado su posición, es decir dentro y fuera de la rodada en toda la circunferencia trazada por la huella de la torre 4.
Para las canaletas pluviométricas se utilizaron mitades de tubos de plástico de 8" de 0 externo y 0.185 m de 0 interno por 2.64 m de largo ubicadas a 0.40 m de altura, con la finalidad de reducir el efecto de rebote de agua del suelo y el ladeo al momento de la aplicación de riego. Para ello fue necesario la elaboración de fijadores de madera, que fueron capaces de sostener la canaleta y permitir el vaciado a la cubeta de colección (de 0.26 m de diámetro por 0.40 m de altura). Se llegó a un área de colección total de 0.5415 m2 (Figura 10).

Las canaletas se instalaron en 54 sitios de muestreo a lo largo del perímetro. De manera perpendicular a la rodada de la torre y paralela al paso del brazo del pivote con un desnivel de 3 %, a favor de la ubicación de la cubeta para el escurrimiento.
El riego diferenciado se aplicó a la velocidad de 100% (159.44 m h-1 en la punta del brazo de 199.92 m y 145.95 m h-1 en la última rodada donde se ubica el prototipo, 183 m del brazo). Para evitar el efecto de la evaporación del agua colectada se midió inmediatamente después del riego -de la cubeta de colección- y se cambió a la nueva posición de la canaleta. También se consideraron datos como la posición georeferenciada del centro de la canaleta (es importante indicar que en la toma de datos se empleó la media de un mínimo de 120 segundos o puntos a fin de disminuir el error posicional), el tiempo de inicio y final, así como el volumen de agua capturado, registrándolo en el formato de campo elaborado para la evaluación.
Al obtener los datos de gasto de las salidas y el tiempo que permanecieron abiertas cada una de las válvulas se estimó la lámina aplicada en cada sección, así como el volumen de agua total empleado durante el riego. El valor del volumen de agua que llega al suelo en cada sección se comparó con los valores de agua aplicada, a fin de estimar la pérdida por efectos del viento y retraso o desfase de la operación de las electroválvulas (por efecto de magnetismo u obstrucción de basura en la salida de las válvulas).
Finalmente, se estimó la lámina de descarga al conocer el tiempo sincronizado de la hora de inicio y final de riego por la canaleta con el programa, y el ciclo de la sección específica. Con ello se comparó la lámina colectada en las canaletas en 2 mapas. También se hizo un comparativo entre el total de agua aplicada por el riego diferenciado con la suposición de un riego uniforme en todo el área, definiendo así la eficiencia de riego a precisión.
Resultados
Después de haber construido el prototipo e instalado el software se tienen las diferentes gráficas que se describen a continuación (Figura 11).
La "pantalla de riego" especifica el tiempo total del ciclo de riego (recuadro intervalo), el cual se define en segundos y está en función de la velocidad del equipo y el criterio del operador, para ello se recomienda tiempos de 30, 60 ó 120 segundos. Al definir el total del ciclo se establece la duración de apertura de cada uno de los 5 tipos de riego, siendo generalmente el 1 (color rojo) de cierre total o sin riego y el 5 (color gris) de apertura total o siempre riego, dejando el 2, 3 y 4 para especificar la cantidad de segundos que resulte de la necesidad de lámina requerida para las diferentes zonas. El programa calcula la duración del tiempo que las válvulas permanecen cerradas en cada uno de los tipos de riego.
La Figura 12 representa gráficamente los riegos donde permanece en movimiento la línea que especifica la variación del tiempo. El recorrido está en función del tiempo del ciclo definido y la cantidad de segundos con la válvula abierta. Esta línea indica la acción exacta que el equipo efectúa cuando coincide con cada línea del tipo de riego y sirve como un primer control de acción de cada válvula. Enseguida se especifican las secciones y tipo de riego en la pantalla 2 o pantalla de secciones.
La pantalla 3 permite especificar el ángulo donde hay una nueva sección, inicia en el 0° de un eje de coordenadas que considera el centro la ubicación del punto de pivoteo del equipo, el valor de la sección es en grados con los decimales que se consideran convenientes, sin embargo, por la precisión del GPS es aconsejable usar grados enteros. El número de sección se toma por default, el cual no es posible cambiarlo pero si modificar su orden, mediante la inserción de otras o borrándolas.
Cada sección debe tener su cantidad de grados de acuerdo al mapa elaborado por interpolación de una variable física del suelo. Para el estudio en cuestión es la conductividad eléctrica, es importante indicar que los valores del ángulo son acumulativos y no deben exceder los 360°, en caso de tener secciones fuera de este rango se deberán borrar. Cuando se especifica el ángulo de la sección es necesario colocar el número de riego que se debe dar (para nuestro caso son 5 tipos), para cada válvula. Al final se actualiza la pantalla, el programa estima las coordenadas (latitud y longitud) de cada uno de los ángulos considerados para las secciones, que son los que se comparara con los datos tomados por el GPS, enseguida se especifican las dimensiones y datos en la pantalla 2 (Figura 13).
En la pantalla 2 se especifica datos para referencia de otros, por eso se inicia definiendo el punto exacto del pivoteo, para ello se debe ser lo más preciso posible y se compara el promedio de datos de varios GPSs "comunes" o se emplea un GPS de precisión, de este número se hace el cálculo "exacta" en m desde el punto de pivoteo hasta la ubicación para todos y cada uno de los valores de las secciones del del prototipo, se pueden considerar los decimales que se programa de riego. Enseguida, se introduce la longitud deseen.
Luego, se incluye el número de válvulas, para el estudio en cuestión fueron ocho (en un sistema completo se colocarán el total de válvulas del pivote), el programa calcula los recuadros para el número de válvulas establecidos en la pantalla de secciones. Seguido se especifica la distancia que existe entre válvulas con lo que el programa construye la tabla de posición de válvulas en forma automática, tomando como la primera posición la distancia de ubicación del prototipo, a partir de ésta se descuenta la distancia entre ellas hasta completar el numero de válvulas.
Sin embargo; los valores de la tabla también se pueden especificar en forma manual, manteniendo el valor aunque se actualice la tabla. Finalmente, es necesario establecer el valor de tolerancia de posicionamiento del GPS, el cual genera un área de cada sección definido por su longitud y ancho en m, obtenido del porcentaje multiplicado por la longitud del equipo, simulando un área circular que permite no tomar los valores del GPS que no estén comprendidos dentro de esta área. De acuerdo a la extensión del área de estudio: 1% representó 1.83 m cada lado de la ubicación del prototipo, usando valores que van de 2 a 5% de acuerdo al modelo de GPS empleado que aseguró una precisión de 3 m cuando recibió datos de estaciones terrestres para su corrección (LOCOSYS Technology Inc., 2006).
La pantalla 1 o principal (Figura 14) requiere la especificación del puerto de comunicaciones con la computadora y activa una barra gráfica, la tabla de esta pantalla registra y publica hasta 26 datos de numero correlativo de la posición, latitud y longitud y la sección donde se ubica dicha coordenada. En caso que el GPS sufra interferencias para la toma del dato o el punto se encuentra fuera del rango de tolerancia aparecen avisos como "adquiriendo señal" o "sin señal".
La pantalla principal también muestra en forma gráfica la extensión de todas las secciones y el tipo de riego que se aplica de acuerdo a los colores establecidos en la pantalla de riego, en esta área se aprecia la posición exacta del GPS y su ubicación dentro del límite de tolerancia graficado con círculos de color celeste. También, refleja el área de riego que alcanza a cubrir cada una de las válvulas. En la parte inferior tiene una barra numérica que muestra el funcionamiento individual de las válvulas en operación, siendo "1" cuando está abierta y "0" cuando está cerrada. Se tiene las opciones de "inicio" de funcionamiento del programa y el de "detener" los cuales son dependientes, es decir cuando uno está "activado" el otro se encuentra ejecutando su función y en forma "inactiva".
Finalmente, la pantalla principal (Figura 14) dispone de la opción de visualización en Google Earht, que al activarse abre dicho programa y exporta tres archivos temporales con extensión .kml, que son el mapa de secciones de cada tipo de riego, el área de tolerancia de posición del GPS y la ubicación del GPS en tiempo real, mismo que se actualiza a medida que se tiene una nueva posición (1 segundo), provocando que la pantalla de Google Earth siempre esté sobre los programas con los que se esté trabajando (Figura 15).
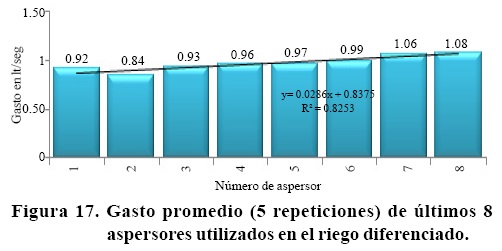
Evaluación del sistema de riego. Al término del riego, el programa imprime los datos en un archivo de texto con el nombre que reúne el "año mes y día" del riego, este documento contiene la hora del inicio de riego, una lista con la hora exacta del momento de riego, un valor correlativo del dato, latitud y longitud en grados decimales y la sección en la que se regó. Se crean tantas líneas como dure el riego a intervalos de 1 a 5 segundos, dependiendo de la capacidad con que se registre la actualización. Se hace una acumulación del tiempo para cada válvula abierta. La sesión finaliza considerando la hora de término de riego (Figura 16 y 17), este archivo se actualiza cada vez que se termine el riego y se cierre el programa. Se crean archivos para cada día de riego en forma independiente, inicia su registro a las 00:00:00 am y termina a las 11:59:59 pm.
Con el tiempo total del riego (29 842 s) y conociendo el gasto se estima el volumen total aplicado, asumiendo que la apertura está siempre y totalmente abierta. Esta la comparamos con el volumen aplicado en el riego diferenciado multiplicando el tiempo que permaneció cada válvula abierta con el gasto respectivo. Para el estudio se utilizaron cinco diferentes ciclos de riego con una duración total de ciclo de 30 s, riego 1: siempre cerrada, riego 2: 20 s abierta 10 s cerrada, riego 3: 23 s abierta 7 s cerrada, riego 4: 26 s abierta 4 s cerrada, riego 5: siempre abierta, la Figura 18 muestra la comparación del volumen de agua aplicado total en el sistema de riego diferenciado y el riego uniforme.
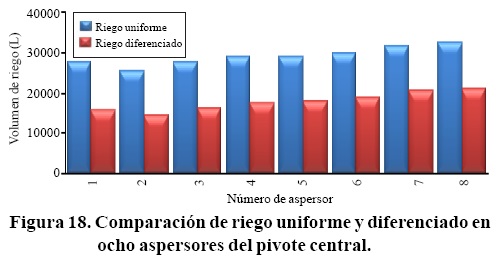
La Figura 18 muestra la cantidad de agua aplicada por cada aspersor y su porcentaje que representa en comparación de riego uniforme, el ahorro de agua con el sistema diferenciado en promedio es 39.09% para el riego descrito. Obtenida la lámina real ordenada y aplicada por el programa de riego (que va de 6a 8 mm) (Figura 19).
La Figura 19 muestra la variación entre la lámina aplicada y la colectada en promedio 8.41% atribuido al efecto del viento, la influencia de la vegetación al momento de la colección en las canaletas y los desfases de operación de las electroválvulas al momento de la apertura y cierre.
Discusión
En los últimos años ha surgido un nuevo enfoque en los sistemas continuos de movimiento de riego (principalmente pivotes y avances), que consiste en controlar electroválvulas de tipo solenoide conectados independientemente o formando grupos de boquillas accionadas en base a mapas de propiedades del suelo y cultivo (Chávez et al., 2010a). Desde 1990, grupos de técnicos en Estados Unidos deAmérica han modificado los sistemas de riego para obtener precisión (Evans et al., 2000; Sadler et al., 2005a) de movimiento continuo: movimiento lineal (LM) y pivote central (CP) que controlan la aplicación variable de caudal en las válvulas solenoides (Evans et al., 2000).
El riego de tasa variable (VRI) ofrece una flexibilidad total, en función de las necesidades específicas del cultivo. El VRI controla la velocidad del sistema para modificar la profundidad de aplicación de riego. Es compatible con el pivote central, avance frontal de movimiento lateral y reverso. Se puede instalar en sistemas de riego nuevos o como un complemento de los sistemas actuales (Lindsay, 2007).
Entre los software desarrollados son PivoRF (De Queiroz et al, 2008), WSU-CPAS RIMCS (Chávez et al, 2010a), AccuFlow VRI (Lindsay International Ltd., 2007) -permiten planear el riego de acuerdo al mapeo previo en el programa FieldMAP-, CropMetrics® VRI Optimization, CropMetrics Virtual Agronomist Pro (VA Pro) -facilitan la identificación del número óptimo y la ubicación de las zonas de control de velocidad para generar la aplicación de agua diferenciada-.
PLC permita la programación, activación, seguimiento en campo, comunicación inalámbrica a un ordenador base, y cambio entre dos sistemas de riego en un sólo equipo-, captura de la señal del GPS (Harting, 1999) y (Evans y Harting, 1999) -requiere de una PC para el ingreso de datos, aunque algunas de sus funciones se puedan establecer en su propio display de control del PLC-, y Farmscan Irrigation Manager™ para aplicación de VRI en un CP se basa en la división radial del círculo en secciones de 2 a 10° y hasta 48 tramos a lo largo del brazo, definiendo un mapa de aplicación diferenciado a base de la digitalización, utilizando láminas de 0 a 200% de la media propuesta de un riego necesario (Perry y Pocknee, 2003).
Los hardware de un sistema de riego de aplicación de tasa variable consta de: un controlador, nodos inalámbricos, válvulas solenoides, cableado de alimentación, unidad GPS (Lindsay International Ltd., 2007). Cada válvula solenoide opera sobre los valores de la base de datos y la ubicación en el campo, con la finalidad de controlar el riego de cada zona. La ubicación en el campo se determina usando un codificador de posición contando el número de gradas, lo que da una clara ventaja en la lectura de la ubicación exacta del pivote con respecto a un círculo de 360°. (Al-Karadsheh et al, 2002). La aplicación efectiva del VRI en CP, Valley Irrigation ha trabajado en dos aspectos: el cambio de la velocidad y en el agrupamiento de válvulas solenoides a lo largo del brazo (Valley, 2008).
Los sistemas de riego de precisión están diseñados para controlar bancos de boquillas que aplican "láminas uniformes" dentro de una zona específica de riego o el área experimental (Chávez et al, 2010b), tomando este criterio (Perry et al, 2004), la evaluación de un sistema de monitoreo y control instalado en sistemas de riego móvil funciona, porque es flexible y capaz de integrar una serie de láminas de agua aplicadas, de acuerdo a la medición de sensores en tiempo real o mapas de características del suelo, cultivo y clima. Una comparación de los SIG programados y ejecutados muestra un buen desempeño, operando las solenoides (On/Off) de acuerdo con los mapas incluidos (Chávez et al, 2010b).
Conclusiones y recomendaciones
Se logró diseñar e implementar un sistema de riego a precisión que permite la operación de electroválvulas en función al geoposicionamiento del pivote central.
Se elaboró un programa de riego diferenciado abierto y adaptable a cualquier equipo de rodamiento circular, bajo condiciones variables del suelo y cultivo.
Se adaptó un sistema de riego electromecánico de control individualizado de las ocho salidas, demostrando la compatibilidad para la conversión total del pivote central.
Se comparó el riego diferenciado con la aplicación uniforme de una lámina de riego, definiendo que en las condiciones de operación del pivote central es de hasta 39.09% menos.
La variación entre la lámina aplicada y la colectada 8.41%, debido al efecto del viento, vegetación y desfase de operación de las electroválvulas.
El riego de precisión con aplicación diferenciada de lámina de riego es una técnica plenamente adaptable a cualquier pivote central que opere en el campo agrícola y se puede diseñar, implementar, poner en funcionamiento, monitorear y evaluar con los recursos que se tienen, logrando un ahorro de agua significativo.
Se recomienda seguir probando el prototipo de riego diferenciado, instalado en otros equipos con más válvulas y definiendo la cantidad de recurso a aplicar, de acuerdo a variables directas medidas en el suelo como la humedad o el estrés hídrico del cultivo.
Literatura citada
Al-Karadsheh, E.; Sourell, H. and Krause, R. 2002. Precision Irrigation: new strategy irrigation water management. Witzenhausen, Germany: conference on International Agric. Res. Develop. 7 pp. [ Links ]
Balastreire, L. 2001. Tecnología para o terceiro milênio, Cultivar Máquinas. Empresa Jornalística CERES. I(1):12-14. [ Links ]
Chávez, J. L.; Pierce, J. F. E. V. T. and Evans, G. R. 2010a. A remote irrigation monitoring and control system for continuous move systems. Part A: description and development. Precision Agriculture. 11:1-10. [ Links ]
Chávez, J. L.; Pierce, F.; Elliott, T.; Evans, R.; Kim, J. and Iversen, W.; 2010b. A remote irrigation monitoring and control system (RIMCS) for continuous move systems. Part B: field testing and results. Precision Agriculture. XI:11-26. [ Links ]
De Queiroz, T. M.; Botrel, T. A. and Frizzone, J. A. 2008. Desenvolvimento de software e hardware para irrigação de Precisão usando pivô central. Rev. Bras. Eng. Agríc. Am. 28(1):44-54. [ Links ]
Electronics, S. 2012a. 66 Channel LS20031 GPS 5Hz Receiver. URL: http://www.sparkfun.com/products/8975 [ Links ]
Electronics, S. 2012b. Tutorial: LS20031 GPS Assembly Guide. URL: http://www.sparkfun.com/tutorials/176 [ Links ]
Evans, R. G.; Iversen, W. M. and Kim, J. et al., 2000. Control for precision irrigation with self-propelled systems. In: R. G. Evans, R. G. Benham, B. L. and Trooien, T. P. (Eds.). Proceedings of the 2000 ASAE 4th decennial national irrigation symposium. Michigan, USA: St. Joseph. 322-331 pp. [ Links ]
Evans, R. G. and Harting, G. B. 1999. Precision irrigation with center pivot systems on potatoes. In : Walton, R. E. R. and Nece, V.A. Reston. (Ed.). Water Res. Eng. Conference. Seattle, Washington: ASCE. 181 pp. [ Links ]
Evans, R. G.; Iversen, W. M.; Stevens, W. B. and Jabro, J. D. 2010. Development of combined site-specific mesa and lepa methods on a linear move sprinkler irrigation system. Am. Soc. Agric. Biol. Eng. 26(5):883-895. [ Links ]
Harting, G. B. 1999. As the pivot turns. Resource. 6:13-14. [ Links ]
León, M. J. A. 2008. Adaptación y evaluación técnica de un sistema de riego lineal por goteo móvil y aspersión. Primera edición (Ed.). Montecillos, Texcoco, Estado de México. Colegio de Postgraduados en Ciencias Agrícolas. 132 pp. [ Links ]
Limited, R. C. 2007. PyQt. URL: http://www.riverbankcomputing.co.uk/software/pyqt/download [ Links ]
Lindsay International Ltd., 2007. Precision Irrigation. URL: http://www.precisionirrigation.co.nz/en/pages/fiillvariablerate/#page=page-2 [ Links ]
Lindsay, 2007. Lindsay Corporation's. URL: http://www.zimmatic.com/. [ Links ]
LOCOSYS Technology Inc., 2006. Locosys. URL: http://www.sparkfun.com/datasheets/GPS/Modules/LS20030~3_datasheet_vL2.pdf. [ Links ]
NaanDanJain Irrigation Ltd. 2012. URL: http://www.catalogue.naandanjain.com/catalogue/product/5709. [ Links ]
Ortega, B. R. y Flores, M. L. 2008. Agricultura de precisión y manejo sitio específico en Chile. Chileriego. III(18):37-41. [ Links ]
Perry, C. and Pocknee, S. 2003. Precision pivot irrigation control to optimize water application. Tifton, Georgia. University of Georgia. 7 pp. [ Links ]
Sadler, E. J.; Evans, R. G. Stone, K. C. and Camp, C. R. 2005. Opportunities for conservation with precision irrigation. J. Soil Water Cons. (6):371-379. [ Links ]
URL: http://www.py2exe.org/.Phyton.
URL: http://www.valleyirrigation.com/page.aspx?id=2343&pid=2342.
URL: http://www.aptana.com/products/studio3/download.
URL: http://www.pythonware.com/products/pil/Phyton.

