











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Los sistemas de levitación magnética en los últimos años se han considerado como un banco de pruebas para diversas estrategias de control (Lei, 2008), (Golob, 2003), (Qin, 2014), (Bächle, 2013) y (Beltran, 2015). Además, se han popularizado por las diversas aplicaciones que tienen, tales como: cojinetes magnéticos (Chen, 2010) y (Du, 2010); sistemas para trenes de levitación magnética (Hasirci, 2011); aislamiento de vibraciones (Tsuda, 2009); microrobots magnéticos (Kummer, 2010); máquinas eléctricas (Arrendondo, 2008); sistema de transportación magnética (Wai, 2011); sistemas de posicionamiento nanométrico (Kim, 2007), entre muchas otras (Peijnenburg, 2006), (Kimman, 2010), (Lee, 2006). El sistema de levitación propuesto en este trabajo consiste en una viga con libertad para rotar, la cual es estabilizada mediante un electroimán colocado en uno de los extremos. El objetivo principal de control en el sistema, es mantener la viga en una posición deseada. En lo que se refiere al control de este sistema existen en la literatura algunos trabajos que abordan el tema. Lindlau et al. (Lindlau, 2002) presentan un controlador mediante linealización por realimentación y, observando su funcionamiento mediante la medición de salida ante entradas lineales, se muestran resultados experimentales del comportamiento del sistema. En Mahindrakar (2008) se presenta un esquema de control para estabilizar el sistema, tomando en cuenta que tiene entrada y estados restringidos, proponiendo un controlador basado en Lyapunov, y realizando la comparación con una ley de control lineal. Otro trabajo que aborda el problema, es el propuesto por Hu et al. (Hu, 2005) en el que se desarrolla un enfoque de diseño sistemático de control con entrada y estados restringidos, obteniendo una región de atracción mayor, comparada con las obtenidas en técnicas lineales; los resultados fueron verificados de manera experimental. En Rodríguez (2000) se usa el método de pasividad para resolver el problema de estabilización del sistema de levitación magnética. Otro trabajo interesante es la propuesta de Lee et al. (Lee, 2003), que soluciona el problema de control de este sistema mediante control por modos deslizantes utilizando dos actuadores magnéticos.
En este artículo, se presenta el modelado del sistema de levitación magnética de un grado de libertad, así como la descripción del dispositivo de pruebas con los elementos electrónicos y mecánicos para su implementación. Además, se menciona el procedimiento de diseño del actuador electromagnético. Por otra parte, se presenta la simulación e implementación de un controlador tipo Proporcional Integral Derivativo (PID) para observar su funcionamiento, así como uno de tipo Proporcional Integral (PI). La principal contribución del trabajo consiste en el sistema que puede funcionar como banco de pruebas para la implementación de diferentes estrategias de control. El trabajo se organiza de la siguiente manera: la sección 2 describe el modelo dinámico del sistema de levitación magnética. En la sección 3 se mencionan las características de la plataforma experimental, además de presentar un procedimiento de diseño del actuador electromagnético. La sección 4 presenta la estrategia de control de tipo PID y algunas simulaciones numéricas. La sección 5 incluye los resultados experimentales implementando la estrategia de control en la plataforma experimental. Finalmente, la sección 6 está dedicada a las conclusiones.
Modelado del Sistema
El Sistema de levitación magnética, mostrado en la Figura 1, es un sistema electromecánico que consiste en una viga en desequilibrio, cuyo centro de gravedad se encuentra a una distancia

Donde:
Se definen las siguientes variables de estado para el sistema (1):
Para obtener el punto de equilibrio se considera
Considerando la naturaleza de
Considerando
Finalmente, el punto de equilibrio está dado por:
Se puede calcular la entrada de control
Donde se puede deducir que en estado permanente es puramente resistiva y que los valores de la variable de corriente y de la entrada de control se incrementan cuando la viga se aleja de la horizontal. Es importante notar que si
Formulación del problema: El objetivo primordial es estabilizar el sistema alrededor del punto de equilibrio, a través de una estrategia de control clásica, suponiendo que la viga se encuentra inicialmente en la región
Para el cálculo de la ley de control estabilizante se utiliza la linealización aproximada del sistema no lineal respecto al punto de equilibrio
Donde:
De la Ecuación (4) se puede obtener la función de transferencia del sistema, expresada de la siguiente forma:
La ecuación anterior es la función de transferencia del sistema (4), donde la entrada es el voltaje aplicado a la bobina -denotado por la variable
Plataforma experimental
En esta sección se describe la plataforma experimental utilizada (Figura 2), mencionando los dispositivos utilizados para la medición de la salida, así como el procedimiento para determinar la constante proporcional de la fuerza electromagnética.

Descripción de la plataforma
La plataforma consiste en:
Una viga de aluminio de aleación temple estándar, por sus características de fácil maquinado; cuenta con propiedades paramagnéticas, asegurando que no se magnetice dicha viga con un imán de neodimio colocado en un extremo para lograr la interacción entre campos magnéticos.
Sensor ACS714 de la compañía Allegro con valores de operación 5V de alimentación y una sensibilidad de 60 mV/A, para la medición de la corriente (
Sensor IMU 6DOF-I2C que integra un acelerómetro ADXL345 y un giroscopio ITG-3200 que permite medir la posición angular de la viga con respecto a la vertical (
Bobina, ver Figura 4.
Tarjeta Discovery STM32F4 para leer las variables del sistema, calcular la acción de control y enviar datos por puerto serial a una computadora.
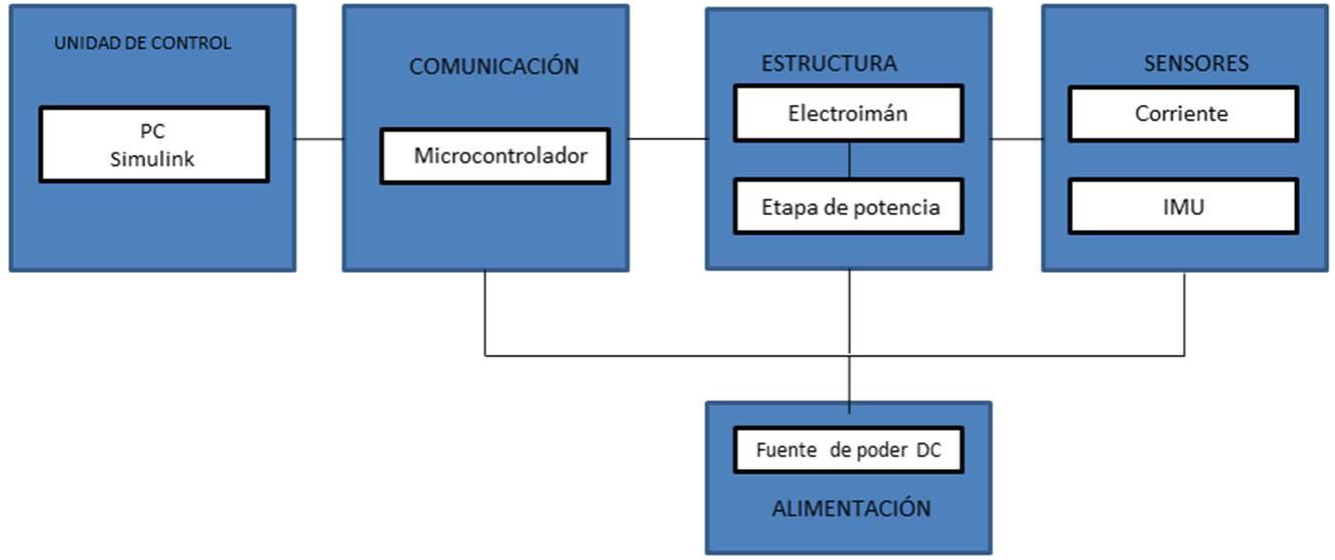
Los datos obtenidos son analizados a través del software MATLAB-SIMULINK versión 2013 de 64bits en una computadora con procesador Core i5 de cuarta generación con 6 Gb RAM. Pictóricamente, se describe la plataforma en el siguiente diagrama a bloques, ver Figura 3.

Descripción del diseño del electroimán
En Rajeshkanna (2012) se describe una metodología para el diseño del electroimán, dicha propuesta es considerada en el presente trabajo. A continuación se presentan los cálculos para diseño del actuador empleado en la plataforma.
Como primer aspecto a considerar, se requiere un electroimán con la capacidad de mover una masa de 0.2 kg a una distancia de 0.05 m. Por tanto, se proponen las siguientes dimensiones para el núcleo y constantes: área de la cara polar
Luego, note que al energizar el electroimán se busca una fuerza adecuada para que mantenga un estado de equilibrio para la masa de la viga. Por tanto, se tiene la siguiente restricción:
Por otra parte, debido al peso de la masa de la viga (m) de 0.2 kg, la fuerza es:
Entonces, para mantener o mover la viga en equilibrio, se requiere una fuerza magnética igual o mayor a 1.962 N; de este resultado se partirá para obtener el valor máximo de la corriente que circulará por el electroimán. De las expresiones (6) y (7) se obtiene:
Y despejando el valor de la densidad de flujo (
Por lo anterior, la fuerza magneto-motriz (fmm) definida como:
Con una longitud del entrehierro (
Si se selecciona que la bobina esté formada por 820 espiras (N), entonces la corriente máxima es:
Finalmente, a partir de la corriente máxima, se elige construir la bobina de un alambre magneto calibre No. 17 y se cubre con Policloruro de Vinilo (PVC) para proteger y dar una mejor apariencia, como se puede observar en la Figura 4.
Determinación de constante de proporcionalidad de la fuerza electromagnética (C e )
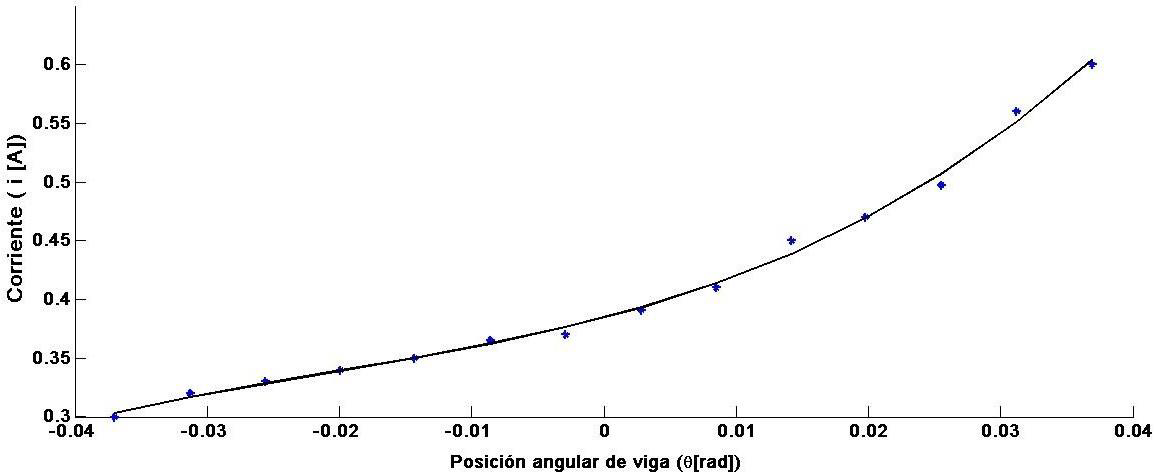
La caracterización de la fuerza electromagnética se basa en Xie (2003) para obtener el valor de
Los datos obtenidos se ajustan a una función polinomial relacionada a la corriente
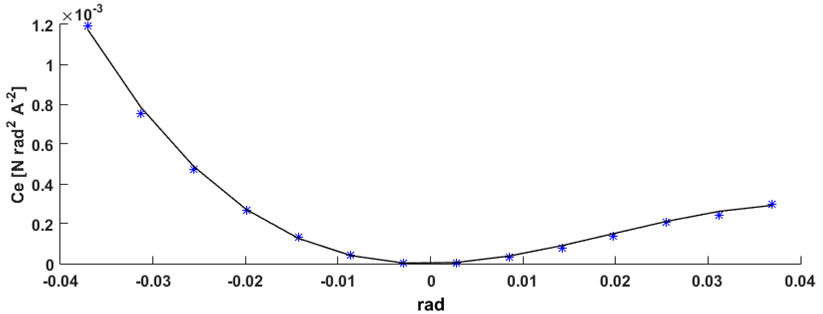
De (1), se tiene que la constante
Sustituyendo (6) y (13), y evaluando en el punto de equilibrio (
En la Figura 6 se muestra el comportamiento de
Estrategia de Control y simulación numérica
El esquema de control propuesto para este sistema es el conocido PID. Esto, debido a que permite una implementación computacional sencilla. La función de transferencia de la ley de control se presenta en la siguiente forma (Sira, 2005):
Con el fin de simplificar la expresión (5), se definen las siguientes constantes:
Quedando:
Realizando el sistema en lazo cerrado de la planta con el controlador y considerando la forma simplificada de (5) y (16), se obtiene la expresión:
Estabilidad del punto de equilibrio
Utilizando el teorema 4.7 de (Khalil, 2002), se puede establecer localmente la estabilidad del punto de equilibrio a partir de los polos de la función de transferencia (17). En este caso, utilizando el criterio de Routh-Hurwitz (para mayores detalles ver Aguirre (2006), Aguirre (2007), Aguirre-Hernández, (2012), Aguirre-Hernández, (2017)), se tienen las siguientes condiciones:
Donde, las condiciones sobre
Resultados numéricos
Con la finalidad de observar el comportamiento del sistema en lazo cerrado del sistema (17), se realizó una simulación numérica en MATLAB considerando los siguientes valores:
Llevar la posición de la viga a
Parámetros del sistema.
Para determinar las ganancias de las leyes de control PI y PID, se realizó la sintonización utilizando el método de Ziegler-Nichols de oscilaciones sostenidas (Sira, 2005). Se obtuvo una ganancia crítica,
Recíprocamente, el controlador PI tiene los siguientes parámetros:
En la Figura 7 se muestra la respuesta corroborando que la viga es llevada a la posición deseada con condición inicial

Resultados experimentales
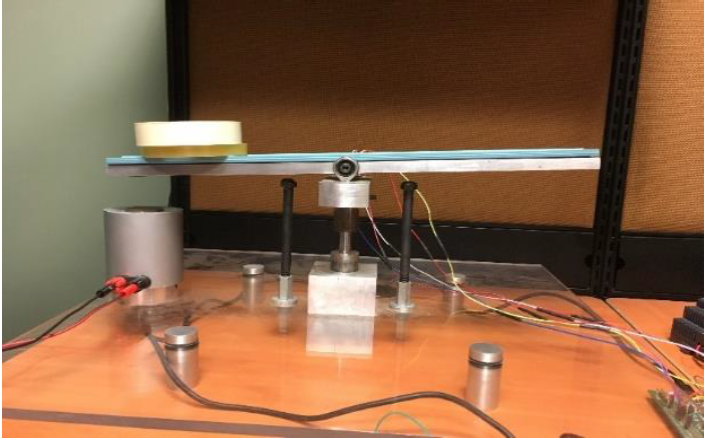
En la plataforma de levitación se implementó la estrategia de control PID propuesta en la sección anterior. Los datos de la posición de la viga y la corriente del electroimán se obtienen mediante una tarjeta Discovery STM32F4 empleada como tarjeta de adquisición con un periodo de muestreo de 10ms. Adicionalmente, la misma tarjeta calcula y envía la señal de control al sistema modulada en PWM. En las Figuras 8 y 9, se muestran el esquema de sistema y el prototipo implementado, respectivamente.


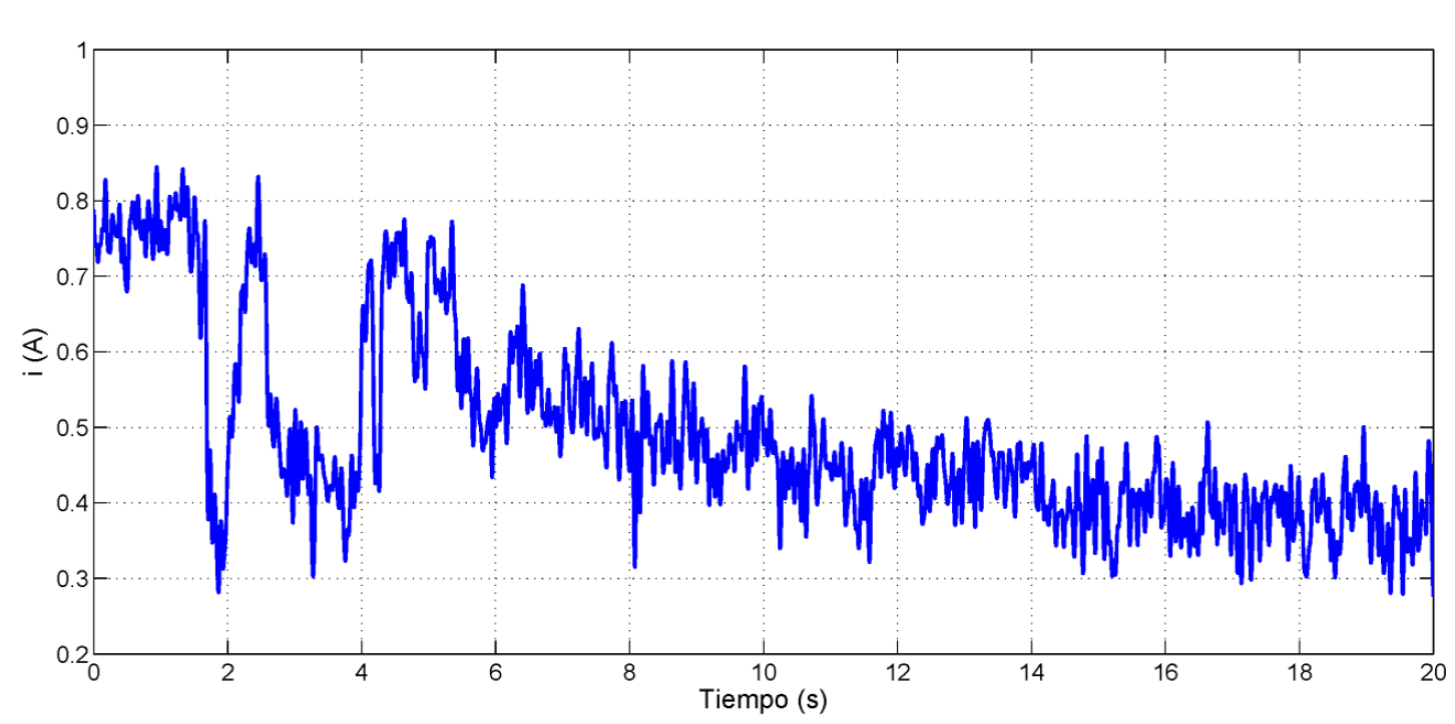
El primer experimento consiste en llevar a la viga a una posición horizontal de
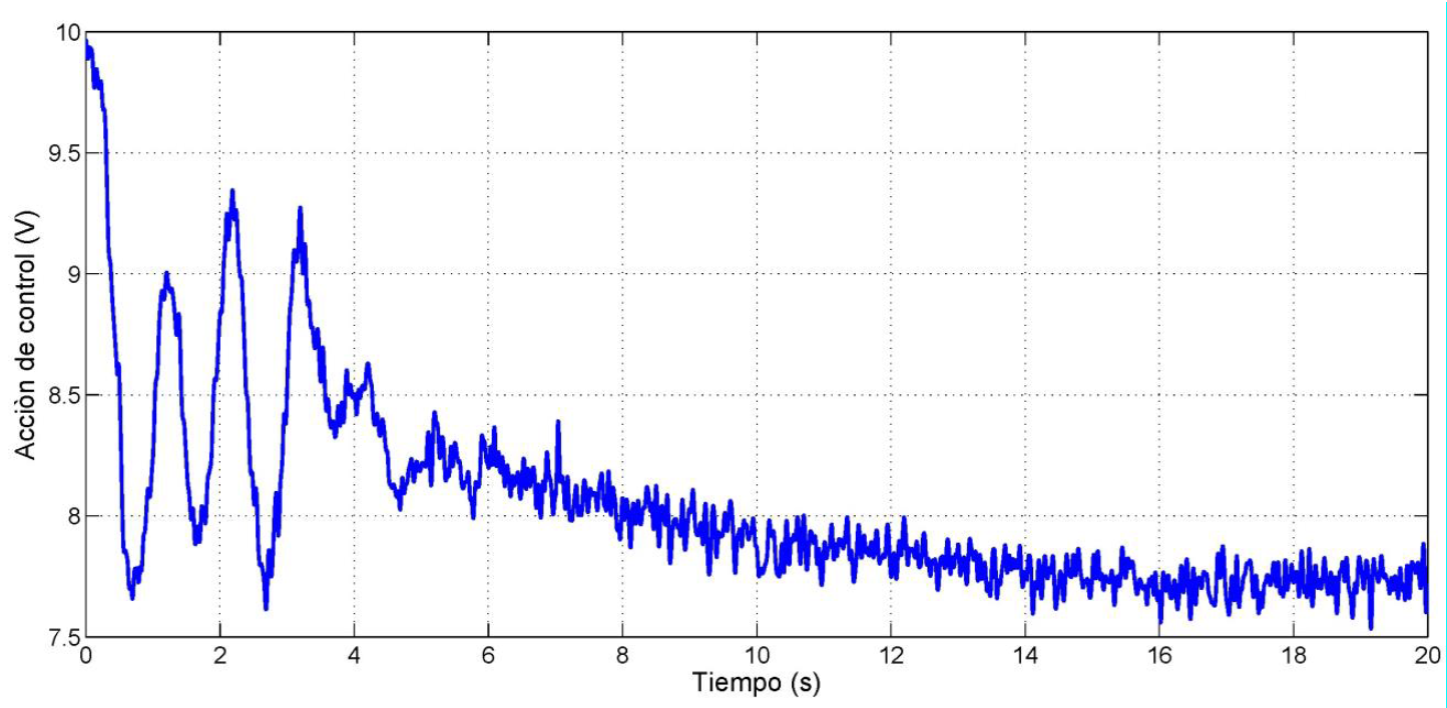
En la Figura 10 se muestra la respuesta del sistema, y se observa que la salida logra la posición deseada después de 18 segundos de manera suave. La Figura 11 muestra la corriente que circula por el electroimán, y finalmente en la Figura 12 se presenta la señal de control aplicada al sistema oscilando entre 7.6 V y 9.3 V.

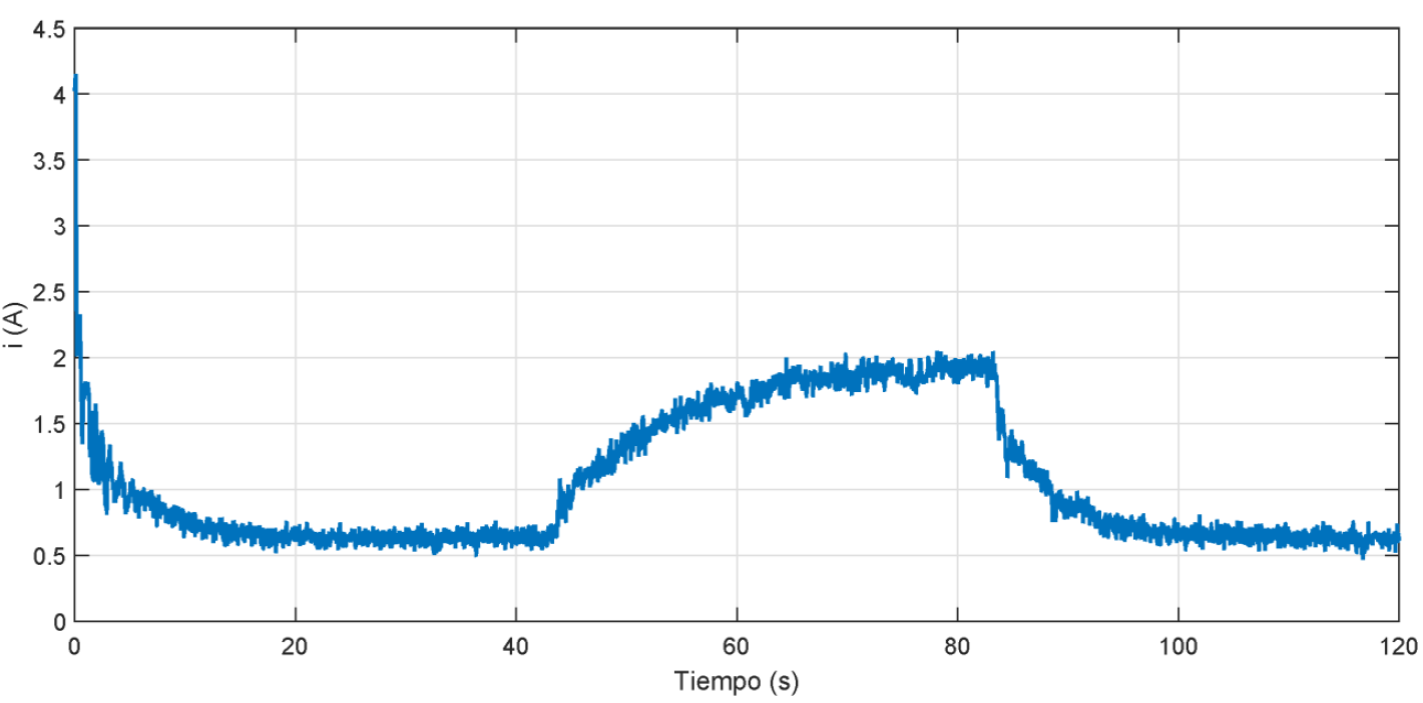
Como segundo experimento, se colocó una carga de 0.30 kg con las mismas condiciones del controlador del experimento anterior, con la finalidad de generar una perturbación externa al sistema. Con ello, se busca que el sistema regrese al equilibrio a pesar de dicha perturbación; es decir, analizar el comportamiento de la ley de control ante perturbaciones externas. En la Figura 13 se muestra el sistema con la carga.
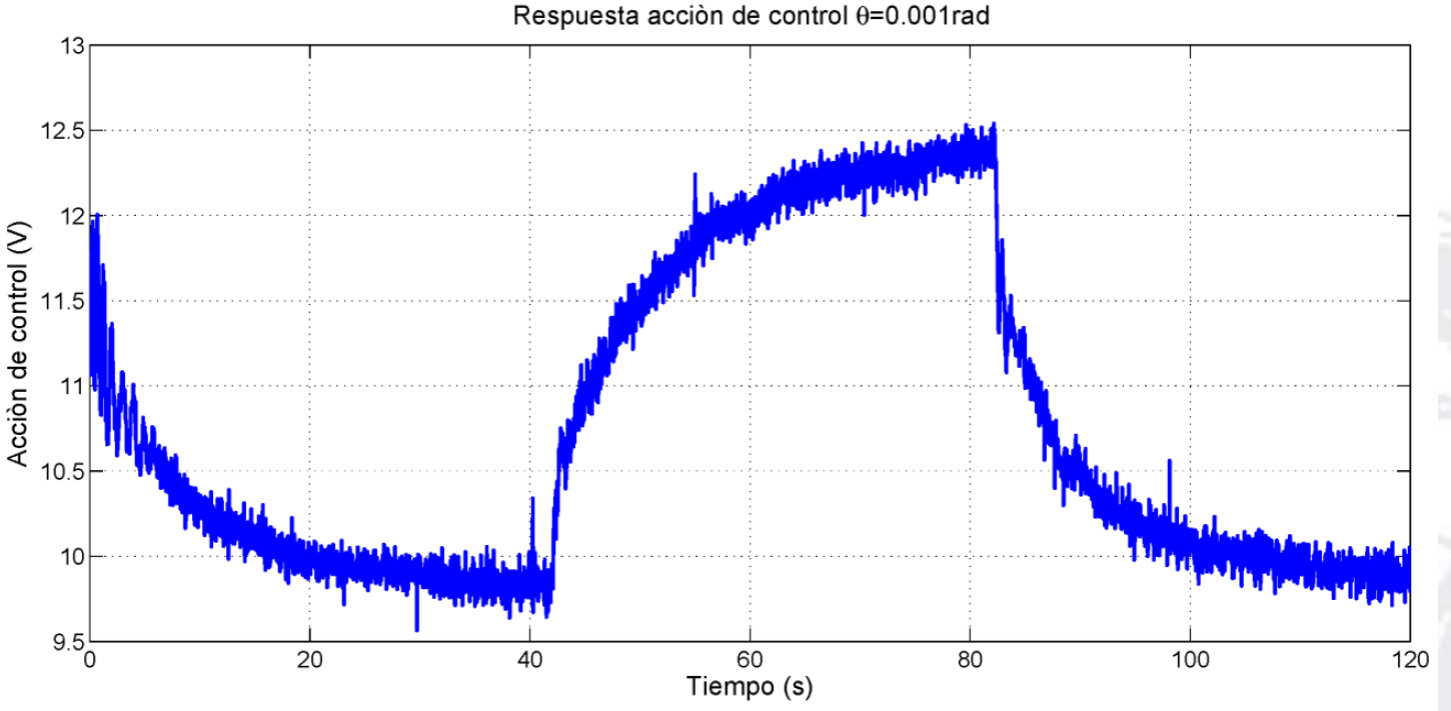
En la Figura 14 se observa el comportamiento del sistema incluyendo la carga. Como primer paso se lleva la viga a la posición deseada de


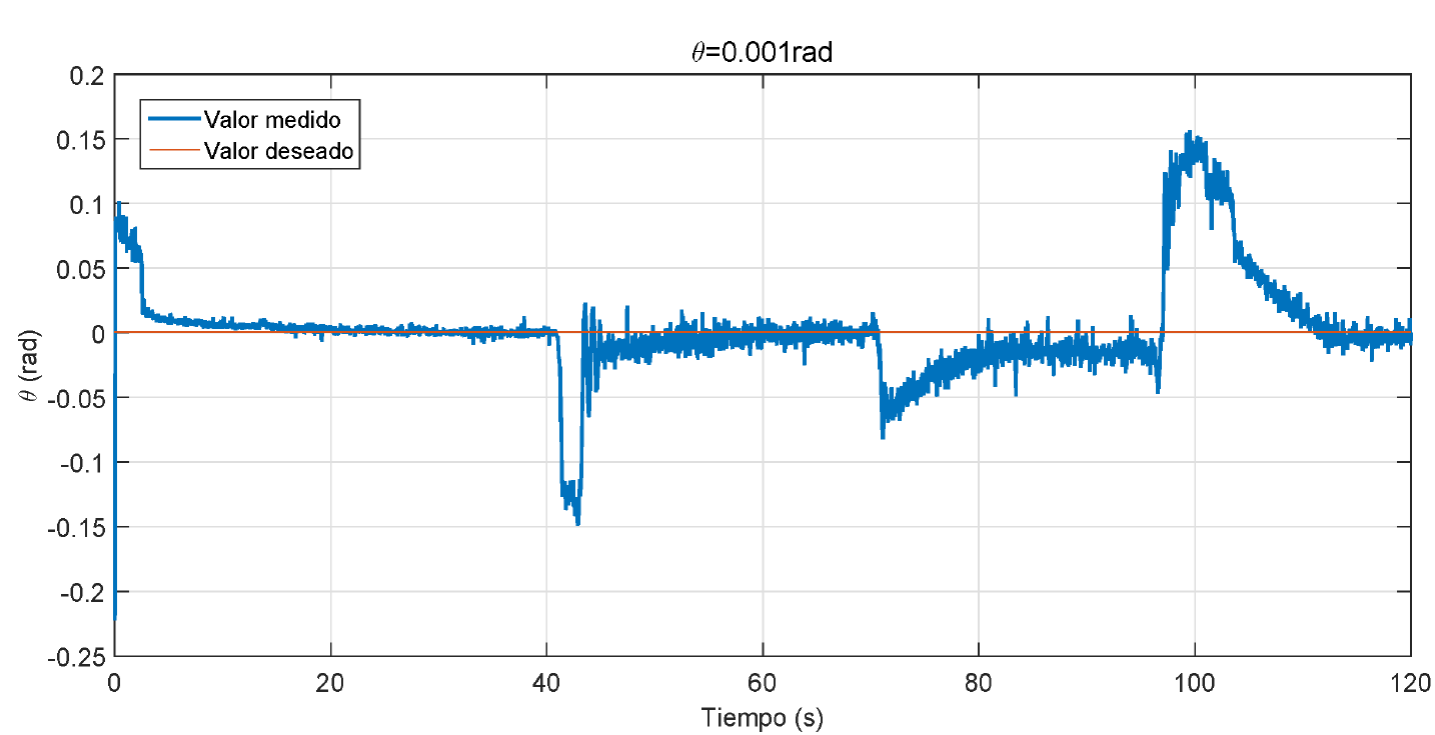
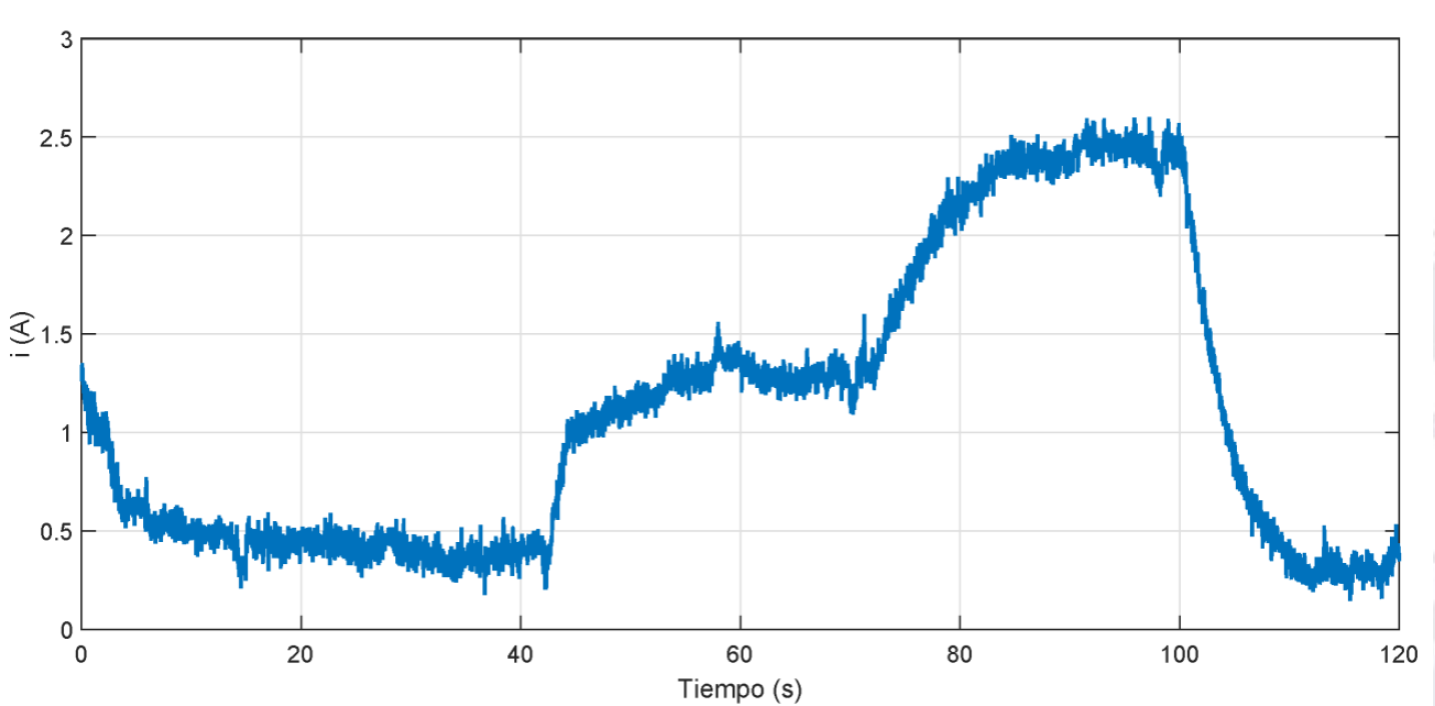
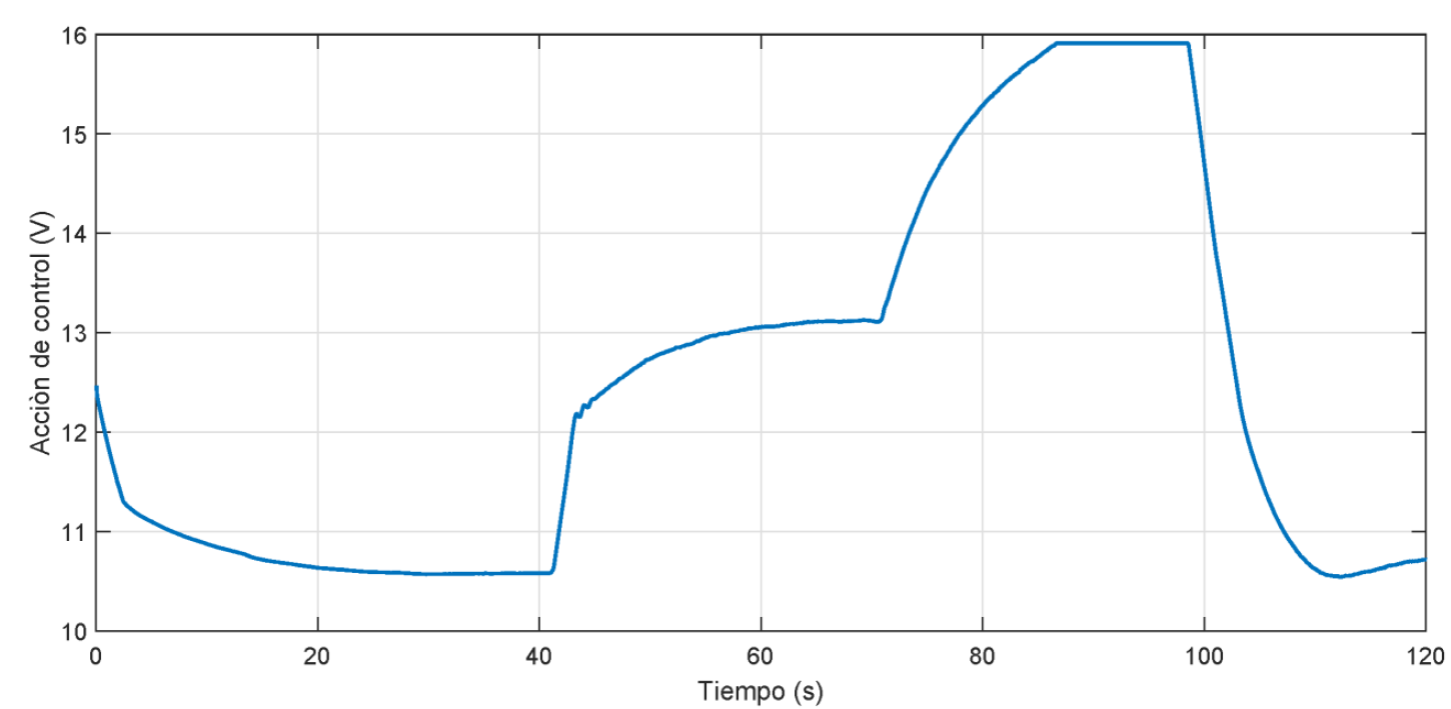
Para comparar el comportamiento de sistema con otro tipo de esquema de control, se implementó un controlador tipo PI, considerando que los parámetros de controlador son

Conclusiones y trabajo a futuro
En este trabajo se presenta el modelado y control de un sistema de levitación magnética de un grado de libertad, así como la construcción de una plataforma experimental que cuenta con la instrumentación para obtener las variables del sistema y poder implementar acciones de control.
Además, se muestra el diseño de un electroimán que tiene la función de actuador. Por otra parte, se realiza la simulación computacional del comportamiento del sistema, así como la implementación de controladores tipo PID y PI permitiendo que se realice una estabilización adecuada en la posición de equilibrio de la viga, verificándose bajo diferentes pruebas, incluyendo perturbación externa. Se plantea como trabajo a futuro el diseñar e implementar estrategias de control y estimación de estado para este sistema, considerando la dinámica no lineal, así como las saturaciones naturales de la entrada de control.

