



![Propiedades electrónicas de semiconductores III-V sometidos a tensión uniaxial en la dirección [111]; un enfoque según el método tight-binding: I. Arseniuros y Fosfuro de Galio](/img/es/prev.gif)






Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkNova scientia
versión On-line ISSN 2007-0705
Nova scientia vol.2 no.3 León abr. 2010
Ciencias Naturales e Ingenierías
Saliencias Espaciales en Motores de Inducción con Rotor Jaula de Ardilla
Spatial Saliencies in Squirrel-Cage Induction Motors
Antonio Zamarrón Ramírez y Salomón Rodríguez Carrera
Departamento de Ingenierías, Universidad De la Salle Bajío, León, Guanajuato. México.
Antonio Zamarrón Ramírez. E-mail: zamarron@ieee.org
Recepción: 09-08-09
Aceptación: 29-10-09
Resumen
En este trabajo se presentan algunas de las saliencias espaciales que aparecen habitualmente en los motores de inducción estándar con rotor jaula de ardilla. Para medir y determinar la magnitud relativa de las saliencias espaciales que se acoplan a los devanados del motor de inducción se utiliza la técnica de inyectar una señal portadora de alta frecuencia en el motor. Se muestra además la forma de crear una saliencia dependiente de la posición del rotor la cual puede ser utilizada en accionadores de c.a. para estimar la velocidad y/o posición del rotor en muy baja velocidad sin utilizar el sensor de velocidad o posición.
Palabras clave: Motor de inducción, sin sensor de velocidad/posición, señal portadora de alta frecuencia, saliencias espaciales.
Abstract
This paper presents some spatial saliencies found in standard squirrel-cage induction motors. A technique for measuring and determining the magnitude of saliencies in induction machines by injecting a balanced, three-phase high frequency carrier signal is used. In addition, it is shown how a rotor position dependent saliencie can be created for estimating speed or rotor position at very low speed in sensorless operation of AC drives.
Key words: Induction motor, sensorless speed/position, high frequency carrier signal, spatial saliencies.
Introducción
Los motores de inducción son diseñados para ser no salientes, es decir, simétricos, pero debido a sus características constructivas presentan saliencias. Las saliencias afectan al comportamiento del motor de inducción en diferentes formas [1]: producen armónicos en el flujo de entrehierro cuyos componentes radiales causan pérdidas (stray losses), rizado en la tensión y par, vibraciones y ruido electromagnético entre otros. Pero las saliencias pueden ser también útiles dado que pueden proporcionar información de lo que está sucediendo dentro de la máquina, tal como aspectos específicos de la saturación [2], excentricidad del rotor [3, 4], corto circuito en espiras del devanado de estator [5] y fallas en el rotor [6] y temperatura [7] entre otros. Algunas de estas saliencias son utilizadas para la estimación de parámetros e implementación de accionadores en control de campo orientado [8, 9, 10, 11, 12].
De forma inherente en un motor de inducción estándar se pueden tener saliencias por excentricidad del rotor (estática y dinámica), ranurado de rotor-estator e inducidas por saturación. Las dos primeras provienen de características mecánicas y la última de características magnéticas. Además de estas saliencias, también es posible tener en el motor de inducción una saliencia determinista que se puede crear modulando el ancho de las aperturas de las ranuras del rotor [13, 14] o variando la resistencia de las barras del rotor [10, 15].
Señal portadora de alta frecuencia
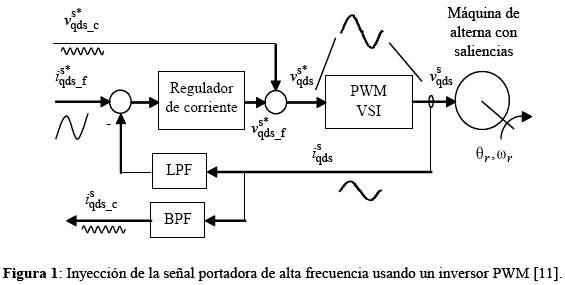
La señal portadora de alta frecuencia [13] que se inyecta en los devanados del motor para medir la magnitud de las saliencias es un vector de tensión de amplitud constante que gira a una frecuencia ωC (1). Esta señal, con una frecuencia mayor que la excitación fundamental de la máquina, puede ser generada mediante un inversor PWM como se muestra en la figura 1 [10, 13, 16, 17, 18]. Note que la señal portadora está superpuesta a la excitación fundamental (2).


Cuando una máquina con saliencias es excitada con una señal de tensión portadora de alta frecuencia (1), se induce una corriente portadora en el motor igual a


donde
ωC = es la frecuencia de la portadora en radianes por segundo.
H = orden del armónico de la saliencia.
= es la magnitud de la corriente portadora de secuencia positiva.
= es la magnitud de la corriente portadora de secuencia negativa.
Como se aprecia en (3) y (4) la corriente portadora puede descomponerse en una corriente de secuencia positiva y una corriente de secuencia negativa. La corriente de secuencia positiva es proporcional a la inductancia transitoria promedio del estator y gira en la misma dirección que la señal de tensión portadora de alta frecuencia. Esta componente de corriente no contiene información espacial de las saliencias presentes en la máquina. Por otro lado, la corriente de secuencia negativa es proporcional a la inductancia transitoria diferencial del estator, gira en dirección opuesta a la señal de tensión portadora de alta frecuencia y contiene información espacial de las saliencias en su fase [10, 13, 16, 17, 18].
Armónicos inducidos por saliencias espaciales
Las saliencias espaciales producen variaciones de permeancia en el entrehierro, rotor y estator. Si se inyecta un vector de tensión trifásico equilibrado de alta frecuencia, superpuesto a la excitación fundamental, en los devanados del motor, las variaciones de permeancia producirán una modulación de la corriente de alta frecuencia inducida en los devanados del estator. Esta corriente portadora de alta frecuencia se puede descomponer, como se mencionó en el apartado anterior, en una corriente portadora de secuencia positiva y una corriente portadora de secuencia negativa. De estas dos componentes la corriente portadora de secuencia negativa es la que contiene información de las saliencias acopladas a los devanados de la máquina. Tal información se puede obtener aplicando la transformada rápida de Fourier (FFT) a la corriente portadora de secuencia negativa. En la figura 2 se presenta la trayectoria de la corriente portadora de secuencia negativa y su FFT, en coordenadas de secuencia negativa de un motor de inducción en condición de carga nominal. Por el número de ranuras de rotor que tiene este motor la saliencia por ranurado no aparece.
En la figura 2b se muestran los armónicos que contiene la corriente portadora de secuencia negativa, en coordenadas de secuencia negativa, que representan a las saliencias acopladas con los devanados del estator y que dan lugar a una corriente de frecuencia relativa.
Los armónicos pueden ser clasificados como sigue:
1. - La componente de corriente continua corresponde a una saliencia estacionaria. Las causas más probables que producen esta componente son los amplificadores de corriente con diferente ganancia, excentricidad estática del rotor y/o asimetrías en el estator. Una de estas asimetrías podría provenir de espiras en corto circuito en el devanado de estator [7, 26].
2. - Los armónicos ±ωe son atribuidos a la saturación [14, 20], aunque existen algunas evidencias que permiten asociarlos con los armónicos por conmutación y efectos de aliasing en el muestreo de las corrientes de fase [21].
3. - El armónico 2ωr se debe a una saliencia creada en el rotor. Esta saliencia se puede crear modulando las aperturas de las ranuras del rotor [13, 14] ó variando la resistencia de las barras del rotor [10, 15].
4. - Las saliencias inducidas por saturación son la fuente más probable para los armónicos 2, -4, 8,...Hz. Estos armónicos se encuentran en la corriente portadora de secuencia negativa definidas por (5) en coordenadas de secuencia negativa:

Para el caso k=0 se obtiene la saliencia inducida por saturación principal con una frecuencia 2ωe. El resto de los armónicos se producen posiblemente por el hecho de que la saliencia por saturación no tiene una distribución espacial sinusoidal [14] y por lo tanto contiene armónicos espaciales adicionales, específicamente armónicos pares. Los armónicos de (5) pueden ser también el resultado de una superposición de los armónicos producidos por saturación y los causados por efectos de la no linealidad del inversor (tiempos muertos y armónicos por conmutación) [12, 19].
5. - Finalmente, la interacción de la saliencia del rotor con las saliencias inducidas por saturación generan un conjunto de armónicos adicionales definidos por (6):

Saliencias espaciales
A. Saliencia por excentricidad. La excentricidad del rotor es debida a errores de construcción, ensamblado del motor, caja de rodamientos y desequilibrios magnéticos [6, 16, 22]. En general la excentricidad no es determinista a menos que exista un problema de manufactura o que la excentricidad sea deliberadamente creada por diseño.
Las excentricidades del rotor pueden ser clasificadas en dos tipos dependiendo de cómo éstas se manifiestan. El primer tipo, llamado excentricidad estática, se produce cuando los centros geométricos del rotor y estator no coinciden en el mismo punto y el rotor gira respecto a su propio centro geométrico. El segundo tipo, llamado excentricidad dinámica, se produce cuando los centros geométricos del rotor y estator no coinciden en el mismo punto y el rotor gira respecto al centro geométrico del estator.
B. Saliencia por ranurado. La saliencia espacial por ranurado se produce por la variación de la permeancia en el entrehierro generado por el ranurado de estator y rotor. Esta variación de la permeancia interactúa con la distribución de los devanados de estator produciendo una variación de la inductancia [10]. Si el motor tiene ranuras en el rotor o estator la variación de la permeancia del entrehierro que se produce es de periodo pequeño o armónico espacial alto respecto al paso polar de la máquina. Este armónico espacial normalmente no produce una variación espacial significativa en la inductancia de los devanados de la máquina [13]. Cuando el motor tiene ranuras en el rotor y estator, la variación de la inductancia se vuelve significativa probablemente porque el periodo es mayor al que produce las ranuras del rotor o estator [13].
C. Saliencia por saturación. Una de las saliencias inherentes en el motor de inducción es la producida por la saturación. Esta saliencia se puede presentar desde niveles bajos de flujo y se incrementa cuando se aumenta el flujo y la carga del motor. Algunos autores la han modelado usando el modelo de dos ejes (qd) [ 11, 14, 17, 23] y [24] mediante el Método de los Elementos Finitos. [17] ha usado esta saliencia para la orientación del campo en un control sin sensor mientras que [11, 13, 14, 19, 23] analizan su comportamiento en diferentes condiciones de operación para considerar su efecto en el desarrollo de accionadores en control vectorial sin sensor de velocidad/ posición basado en saliencias espaciales.
D. Tipo de ranura del rotor. Los efectos de la saturación son generalmente asociados al flujo creado por la corriente de magnetización y al flujo de dispersión puntual creado por la corriente de ranura [17]. Ambas formas de saturación se pueden encontrar tanto en el estator como en el rotor y crear una modulación de la inductancia de dispersión que sea capaz de modular la inductancia transitoria de estator. El grado de saturación debido al flujo principal o al flujo de dispersión es influenciado por la ranura del rotor, es decir si la ranura es abierta, semicerrada o cerrada.
E. Efecto de la inclinación de las barras del rotor. Inclinar las barras del rotor en un motor de inducción produce una disminución importante de la saliencia por ranurado. En [25] se presentan resultados experimentales realizados con varios motores de inducción diseñados con diferente inclinación en las ranuras del rotor y diferente tipo de devanado en el estator. De estos resultados se puede observar que inclinar las barras del rotor produce una fuerte influencia en la magnitud de la saliencia por ranurado. Un motor con ranuras rectas en el rotor, por ejemplo, puede presentar una magnitud del armónico por ranurado hasta seis veces mayor que el mismo motor con barras inclinadas en el rotor (con una inclinación equivalente a una ranura de estator) [25]. Sin embargo el hecho de inclinar las barras del rotor más allá de una ranura de estator no necesariamente produce una disminución extra del armónico de ranurado. De los resultados experimentales en [25] se puede ver que no existe diferencia apreciable de la magnitud de este armónico entre inclinar las barras 1.2 o 0.8 ranuras de estator.
Otra característica del motor que impacta en la magnitud del armónico de ranurado es el tipo de devanado, o más específicamente el factor de devanado. Comparando el factor de devanado de un devanado de paso fraccionario y uno de paso completo es posible determinar que el quinto armónico de este factor es 5.7 veces más grande en el de paso completo [25].
F. Saliencia determinista. Además de las saliencias inherentes en un motor de inducción estándar, es posible crear de forma determinista una saliencia que no dependa de las condiciones de operación de la máquina ni de la combinación de ranuras de rotor y estator. La saliencia se puede crear haciendo aperturas en los puentes (sobre las barras) de un rotor con ranuras cerradas. El ancho de las aperturas se modulan de tal manera que sigan un patrón lo más sinusoidal posible. Esta modulación produce una variación del flujo de dispersión del rotor creando una saliencia dependiente de la posición del rotor. Otra forma de crear una saliencia dependiente de la posición el rotor es variando circularmente la resistencia de las barras del rotor.
Resultados
En la figura 3 se presenta la trayectoria y FFT de la corriente portadora de secuencia negativa, en coordenadas de secuencia negativa, de un motor con ranuras abiertas en el rotor. Iqds es la corriente fundamental, ωr la velocidad eléctrica del rotor, Vc y ωc la tensión de pico y frecuencia de la señal portadora respectivamente. La trayectoria que toma la corriente portadora de secuencia negativa (figura 3a), bajo las condiciones de operación de la máquina indicadas en el pie de la misma figura, es circular ya que bajo estas circunstancias solo el armónico por ranurado está presente. Si al motor se le aplicase conjuntamente con la señal portadora una excitación fundamental, la trayectoria de la corriente portadora de secuencia negativa dejaría de ser circular debido principalmente a la presencia de armónicos inducidos por saturación.
De la figura 3b se puede observar que el armónico por ranurado se localiza en 14ωr Hz, frecuencia determinada por el número de par de polos (en este caso 2) de la máquina y el número de ranuras y velocidad eléctrica del rotor. La magnitud del armónico es dependiente del ancho de las aperturas, inclinación de las ranuras del rotor, tipo de devanado del estator y magnitud de la tensión de la señal portadora.
En los experimentos realizados la señal de alta frecuencia se inyecta mediante un inversor lineal. El propósito de utilizar un inversor lineal es evitar los armónicos causados por los tiempos muertos y armónicos por conmutación que se tendrían con un inversor PWM [19].
En la figura 4 se presenta un rotor con aperturas moduladas junto con el gráfico que muestra el ancho de corte de cada apertura. La profundidad del corte es el suficiente para dejar al descubierto la parte superior de las barras a lo largo del rotor. En la figura 5 se muestra la trayectoria y FFT de la corriente portadora de secuencia negativa cuando este motor se hace girar a una velocidad constante y no se le inyecta corriente fundamental. Por la posición del armónico en la figura 5b y la velocidad eléctrica del rotor es posible darse cuenta que la saliencia dependiente de la posición del rotor gira dos veces la velocidad eléctrica del rotor (cuatro veces la velocidad mecánica para un motor de cuatro polos). Si no se tuviera el armónico -4ωr, la trayectoria de la corriente portadora de secuencia negativa (figura 5a) sería completamente circular.
En la figura 6 se presentan la FFT de la corriente portadora de secuencia negativa para un motor con ranuras abiertas y otro con ranuras cerradas. Se puede apreciar que la magnitud de las saliencias inducidas por saturación en el motor de ranuras abiertas es notablemente menor que en el motor de ranuras cerradas. Esto se debe principalmente a que el flujo de dispersión y el flujo principal "ven" una mayor inductancia en la apertura de la ranura en el motor de ranuras abiertas respecto al de ranuras cerradas.
Conclusiones
En este trabajo se ha presentado el tipo de saliencias espaciales que se pueden tener en un motor de inducción, así como una técnica que permite obtener con relativa facilidad la magnitud y fase de las saliencias acopladas a los devanados de la máquina. Las saliencias espaciales en el motor de inducción con rotor jaula de ardilla pueden deberse a características mecánicas o magnéticas de manera inherente, aunque también es posible crear una saliencia en forma determinista.
Algunas de las saliencias presentes en el motor de inducción, como la producida por la excentricidad estática, son estacionarias mientras que otras dependen de la velocidad o posición del rotor y de la frecuencia de la excitación fundamental. Su magnitud depende entre otras cosas de parámetros de diseño del motor como el tipo de ranura del rotor y la inclinación de las barras, por ejemplo.
Reconocimientos
Los autores desean agradecer el apoyo y motivación proporcionados por la Universidad De La Salle Bajío para el desarrollo de este trabajo.
Referencias
[1] M. L. Aime, M. W. Degner, and R. D. Lorenz, "Measuring the Location of Saliencies in AC Machines" presented at Proc. IECON, Aachen Germany, August 1998. [ Links ]
[2] J. C. Moreira and A. T. Lipo, "Modeling of Saturated ac Machines Including Air Gap Flux Harmonics Components", IEEE Transactions on Industry Applications, vol. 28, March-April 1992, pp. 343-349. [ Links ]
[3] L. Gojko, M. D. Durovic, J. Penman, and N. Arthur, "Dynamic Simulation of Dynamic Eccentricity in Induction Machines -- Winding Function Approach", IEEE Transactions on Energy Conversion, vol. 15, June 2000, pp. 143-148. [ Links ]
[4] A. Barbour and W. T. Thomson, "Finite Element Study of Rotor Slot Designs With Respect to Current Monitoring for Detecting Static Airgap Eccentricity in Squirrel-Cage Induction Motors", presented at IEEE Transactions on Industrial Applications, New Orleans, October 5-8, 1997. [ Links ]
[5] F. Briz, M. W. Degner, A. Zamarrón, and J. M. Guerrero, "On-Line Stator Winding Fault Diagnosis in Inverter-Fed AC Machines Using High Frequency Signal Injection", presented at IAS2002, Pittsburgh, Octuber 2002. [ Links ]
[6] Briz F., Degner, M.W., Guerrero J.M. and Diez A.B., "Temperature Estimation in Inverter-Fed Machines Using High-Frequency Carrier Signal Injection", IEEE Transaction on Industry Applications, vol 44, No. 3, May-jun 2008. [ Links ]
[7] Briz F., Degner,M.W., Guerrero J.M. and García P., " Online diagnostics in inverter-fed induction machines using high-frequency signal injection", IEEE Transaction on Industry Applications, vol 45, No. 5, Sept-oct 2009. [ Links ]
[8] M. W. Degner and R. D. Lorenz, "Position Estimation in Induction Machines Utilizing Rotor Bar Slot Harmonics and Carrier-Frequency Signal Injection", IEEE Transactions on Industry Applications, vol. 36, May/June 2000, pp. 736-742. [ Links ]
[9] P. L. Jansen and R. D. Lorenz, "A Physically Insightful Approach to the Design and Accuracy Assessment of Flux Observers for Field Oriented Induction Machine Drives", IEEE Transactions on Industry Applications, vol. 30, January-February 1994, pp. 101-110. [ Links ]
[10] N. Teske, G. M. Asher, K. J. Bradley, M. Summer, and J. Cilia, "Sensorless Position Control of Induction Machines using Rotor Saliencies under Load Conditions", presented at EPE, Lausanne, 1999. [ Links ]
[11] N. Teske, G. M. Asher, M. Summer, and K. Bradley, "Suppression of Saturation Saliency Effects for Sensorless Position Control of Induction Motor Drives Under Loaded Conditions", IEEE Transactions on Industrial Electronics, vol. 47, Octuber 2000, pp. 1142-1150. [ Links ]
[12] N. Teske, G. M. Asher, M. Summer, and K. J. Bradley, "Analysis and Supression of High-Frequency Inverter Modulation in Sensorless Position Controlled Induction Machine Drives", presented at Proc. IEEE-IAS, Annual meeting, Chicago, September -Octuber 2001. [ Links ]
[13] M. W. Degner, Flux, Position and Velocity Estimation an AC Machines Using Carrier Frequency Signal Injection, Ph.D Thesis in Dept. of Mechanical Engineering. Wisconsin-Madison: University of Wisconsin-Madison, 1998. [ Links ]
[14] F. Briz, M. W. Degner, A. Diez, and R. D. Lorenz, "Measuring, Modeling and decoupling of Saturation-Induced Saliencies in Carrier Signal Injection-Based Sensorless AC Drives", IEEE Transactions on Industry Applications, vol. 37, September-October 2002, pp. 1356-1364. [ Links ]
[15] J. Cilia, G. M. Asher, and K. J. Bradley, "Sensorless Position Detection for Vector Controlled Induction Motor Drives Using an Asymetric Outer-Section Cage", presented at IAS Annual Meeting, 1996. [ Links ]
[16] P. L. Jansen and R. D. Lorenz, "Transducerless Position and Velocity Estimation in Induction and Salient AC Machines", IEEE Transactions on Industry Applications, vol. 31, March 1995, pp. 240-247. [ Links ]
[17] P. L. Jansen and R. D. Lorenz, "Transducerless Field Orientation Concepts Employing Saturation-Induced Saliencies in Induction Machines", IEEE Transactions on Industry Applications, vol. 36, November-December 1996, pp. 1380-1393. [ Links ]
[18] M. W. Degner and R. D. Lorenz, "Using Multiple Saliencies for the Estimation of Flux, Position and Velocity in AC Machines", IEEE Transactions on Industrial Applications, vol. 34, Sept./Oct. 1998, pp. 1097-1104. [ Links ]
[19] F. Briz, M. W. Degner, A. Diez, and R. D. Lorenz, "Static and Dynamic Behavior of Saturation-Induced Saliencies and Their Effect on Carrier Signal Based Sensorless AC Drives", IEEE Transactions on Industry Applications, vol. 38, May-June 2002, pp. 670-678. [ Links ]
[20] N. Teske, G. M. Asher, M. Summer, and K. J. Bradley, "Sensorless Position Estimation for Symmetric Cage Induction Motor Under Loaded Conditions", presented at Proc. IEEE-IAS Annual Meeting, Rome, Italy, October 2000. [ Links ]
[21] F. Briz., M. W. Degner, J. M. Guerrero, A. Zamarrón, and R. D. Lorenz, "Implementation Issues Affecting the Performance of Carrier Signal Injection Based Sensorless Controlled AC Drives", presented at Proc. IEEE-IAS, Chicago, September-October 2001. [ Links ]
[22] L. G. Biowski and D. Mazur, "2D and 3D Analysis of Damages of Three-Phase Induction Motor Including Time and Space Harmonic Effects". [ Links ]
[23] M. L. Aime, M. W. Degner, and R. D. Lorenz, "The Effects of Saturation Induced Saliency Movement on Flux Angle Estimation", presented at IEEE AMC'98, Coimbra, 1998. [ Links ]
[24] J. I. Ha, S. K. Sul, K. Ide, I. Murokita, and k. Sawamura, "Physical Understanding of High Frequency Injection Method to Sensorless Drives of an Induction Machine", presented at IEEE-IAS Annual Meeting, Roma, Italy, 2000. [ Links ]
[25] T. M. Wolbank and R. Wohrnschimmel, "Influence of Rotor Design on Sensorless Control for Induction Motors", presented at EPE, Garz, 2001. [ Links ]
[26] Briz F., Degner, M.W., Guerrero J.M. and García P., "Stator Windings Fault Diagnostics of Induction Machines Operated From Inverters and Soft-Starters Using High-Frequency Negative-Sequence Currents", IEEE Transaction on Industry Applications, vol 45, No. 5, Sept-oct 2009. [ Links ]

