











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Desde el año 1995, gracias al estudio de Ginsberg et al., quedó establecido que el tratamiento adecuado para los estadios tempranos de carcinoma broncogénico no microcítico es la lobectomía pulmonar más disección ganglionar mediastinal sistematizada.1 En los últimos años se ha demostrado que es una buena elección que esta cirugía sea realizada por técnica quirúrgica de mínima invasión.2 Dentro de las opciones para el abordaje mínimamente invasivo existe una gran variedad: desde el uniportal, multiportal, subxifoideo, transcervical, hasta la cirugía torácica asistida por robot (RVATS), que en los últimos años ha ido tomando fuerza, sobre todo en los Estados Unidos de América y algunos países de Europa. Sin embargo, son pocos los reportes del uso de la cirugía robótica en países de ingreso económico medio o bajo, esto debido a los elevados costos que presenta esta tecnología en la actualidad.
La RVATS, en la actualidad, y según el más reciente metaanálisis,2 establece que no hay diferencias significativas entre los estudios que comparan la cirugía torácica videotoracoscópica (VATS) y la RVATS, pero existe una tendencia en favor de un retiro más temprano de drenajes, disminución de días de hospitalización y, sobre todo, menor mortalidad en el grupo RVATS. La notable mejoría en la visión del campo operatorio, la capacidad de movimiento fino del instrumental quirúrgico y la mejora en la ergonomía del cirujano al poder operar sentado, son detalles importantes a resaltar, que sin duda se traducen en un beneficio para el paciente, tomando en consideración que dicha técnica se encuentra, en la actualidad, en una etapa inicial y que con toda seguridad seguirá mejorando en los siguientes años.
Presentación de los casos
El caso A se trata de un varón de 63 años, que, tras un síncope de origen cardiogénico, se le diagnostica un nódulo pulmonar de 25 mm en el lóbulo superior derecho (Figura 1), el cual, tras ser estudiado y presentar un PET-CT con captación positiva, es propuesto para cirugía resectiva de dicho nódulo. Durante la RVATS, el estudio transoperatorio demuestra malignidad, por lo que se completa la lobectomía con linfadenectomía. El resultado histopatológico es de un adenocarcinoma de pulmón T1N0M0, EIa, habiéndose retirado 17 ganglios mediastinales correspondientes a las estaciones mediastínicas 5, 6, 7, 8, 9 y 10, con un sangrado transoperatorio de 50 mL, un tiempo operatorio de tres horas 58 min, de los cuales, 45 fueron para el marcaje de puertos, colocación y acoplamiento de los mismos al robot; 155 min comprendieron el tiempo quirúrgico real y 58 min para la colocación de drenaje, el cierre de heridas, el desacoplamiento del robot y el despertar de la anestesia. Se colocó un drenaje pleural acanalado flexible 24Fr, mismo que a las 36 horas se retiró y se dio el alta hospitalaria al tercer día.
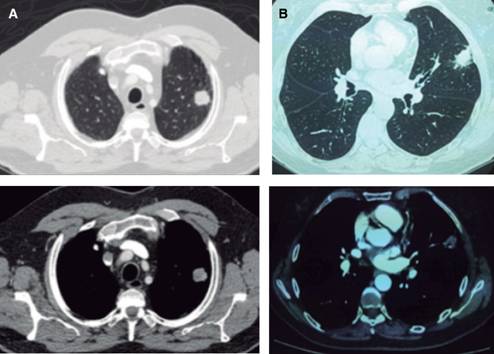
El caso B se trata de una mujer de 62 años en la que, tras un cuadro infeccioso respiratorio, se detecta en una Rx de tórax una opacidad en el lóbulo superior izquierdo. Después de realizarse tomografía de tórax (Figura 1) y, posteriormente, PET-CT, que da positivo; se decide realizar RVATS. El estudio transoperatorio demuestra malignidad, por lo que se completa la lobectomía con linfadenectomía. El resultado histopatológico es el de un adenocarcinoma de pulmón T1N0M0, EIa, habiéndose retirado 15 ganglios mediastinales correspondientes a las estaciones mediastínicas 5, 6, 7, 8, 9 y 10, con un sangrado transoperatorio de 70 mL y un tiempo operatorio de dos horas 58 min, de los cuales, 35 fueron para el marcaje de puertos, colocación y acoplamiento de los mismos al robot; 115 min fueron de tiempo quirúrgico real y 28 min para colocación de drenaje, cierre de heridas, desacoplamiento del robot y despertar de la anestesia. Se colocó un drenaje pleural acanalado flexible 24Fr, mismo que a las 24 horas se retiró y se dio el alta hospitalaria al cuarto día.
Ambos pacientes se trataron con esquema analgésico a base de ketorolaco 30 mg IV c/8 horas, alterno con paracetamol 1 g IV y tramadol gotas en caso de ser necesario. Y se administró ceftriaxona 1 g transoperatorio y dos dosis más después de la cirugía.
Discusión
Los cambios en las conductas quirúrgicas siempre son difíciles de establecer, incluso cuando se cuenta con todo el soporte científico de respaldo, pero cuando la evidencia científica no demuestra claros beneficios entre dos formas de trabajar y además la nueva técnica es claramente más costosa que la que se utiliza hasta el momento aún es más compleja su instalación; por ello, nos parece de importancia capital presentar nuestros primeros dos casos de RVATS para el tratamiento del carcinoma broncogénico en etapa I, en un país de ingreso económico medio. La plataforma utilizada para ambos procedimientos fue el sistema Da Vinci Si ® Intuitive Surgical (USA). En ambos casos utilizamos cuatro brazos colocados en séptimo espacio intercostal. El puerto de la cámara (12 mm) se colocó en la línea axilar anterior, el brazo 1 (8 mm) en línea axilar media (aproximadamente a 10 cm de la cámara), el brazo 2 (8 mm) a 10 cm de la cámara en dirección opuesta y el brazo 3 (8 mm) a 10 cm del brazo dos hacia la columna vertebral, respetando los ligamentos paravertebrales; todos los puertos se colocaron bajo visión directa intratorácica. Se colocó un quinto puerto (12 mm) para el asistente, en noveno espacio intercostal línea axila anterior que también utilizamos para la insuflación de CO2 con un flujo medio de 8 mmHg. Dentro del instrumental utilizado en el brazo 1 se usó una pinza Maryland con energía bipolar, en el brazo 2 una pinza Cadiere, en el brazo 3 un Grasper doble fenestrado.
Antes de comenzar la lobectomía, se realizó la disección ganglionar mediastinal sistematizada, ya que el retiro de los ganglios facilita la disección de los elementos broncovasculares.
Dentro de los pasos para realizar la lobectomía, siempre comenzamos por la vena pulmonar superior, posteriormente las arterias segmentarias que van al lóbulo superior izquierdo, mismas que se realizan con sutura mecánica vascular de 2.5 mm de ancho de grapa. Posteriormente, se procede a completar la cisura para dividir los lóbulos y finalmente se engrapa el bronquio lobar superior con sutura mecánica de 3.5 mm de ancho de grapa. La introducción de la engrapadora la realiza el asistente por su puerto.
Según Veronesi G,4 hoy en día el 10% de las lobectomías por cáncer ya se están practicando por RVATS en los Estados Unidos. En los últimos años, el número de centros que cuentan con cirujanos adiestrados en el uso de la plataforma Da Vinci se ha incrementado notablemente. En la actualidad, hay casi 4,000 sistemas instalados en este país. El desarrollo en países de ingreso económico medio como el nuestro es mucho más lento; en la actualidad, sólo se cuenta con 10 plataformas en todo México. La barrera actual son los elevados costos, aunado a la falta de cirujanos entrenados en esta plataforma.
Las ventajas que ofrece el sistema Da Vinci, con la mejora en la calidad de imagen en 3D, la precisión de sus instrumentos y el filtrado de movimientos poco precisos, hacen que la cirugía sea más segura, con menor pérdida hemática y mejores resultados en la linfadenectomía mediastínica. En países donde no se cuenta con un número de especialistas suficientes para cubrir las demandas de patología específica, donde la mayoría no tiene entrenamiento en mínima invasión, la plataforma Da Vinci será una buena alternativa. Su patente está próxima a abrirse al mercado y el advenimiento de nuevas plataformas robóticas mejoradas, que incluso permitan la cirugía a distancia y la migración de cirujanos que hacen técnica abierta clásica directamente al robot sin pasar por el entrenamiento de mínima invasión, nos hace pensar que esta tecnología permitirá que el número de pacientes beneficiados sea cada vez mayor.
En conclusión, la puesta en marcha de un programa de cirugía torácica asistida por robot en un país de ingreso económico medio es posible, ofreciendo resultados comparables a la técnica establecida en cuanto a seguridad y resultado oncológico. Los elevados costos actuales seguramente se verán reducidos una vez que aumente el número de plataformas en el mercado que den como resultado precios más competitivos.

