nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkPACS: 45.20.D-; 45.20.Jj; 05.45.-a
1. Introduction
The simple plane pendulum constitutes an important physical system whose analytical solutions are well known. Historically the first systematic study of the pendulum is attributed to Galileo Galilei, around 1602. Thirty years later he discovered that the period of small oscillations is approximately independent of the amplitude of the swing, property termed as isochronism, and in 1673 Huygens published the mathematical formula for this period. However, as soon as 1636, Marin Mersenne and René Descartes had stablished that the period in fact does depend of the amplitude 1. The mathematical theory to evaluate this period took longer to be established.
The Newton second law for the pendulum leads to a nonlinear differential equation of second
order whose solutions are given in terms of either Jacobi elliptic
functions or Weierstrass elliptic functions1,2,3,4,5,6,7. There are several textbooks on classical mechanics 8,9,10, and recent papers 11,12,13, that give account of these solutions. From the
mathematical point of view the subject of interest is the one of elliptic
curves such as y
2 = (1-x2)(1-k2
x2), with
Because the solutions to the simple pendulum problem are given in terms of elliptic functions and the founder fathers of the subject taught us all the interesting properties of these functions, it can be concluded that all the characteristics of the different type of motions of the pendulum are known. This is strictly true, however most of the references on elliptic functions (see for instance 2,3,4,5,6,7 and references therein) focus, as it should be, on its mathematical properties, applying just some of them to the simple pendulum as an example. In this paper we review part of the analysis made by Klein 17, who studied the properties that the transformations of the modular group Γ and its congruence subgroups of finite index Γ(N) have on the modular parameter τ, being the latter a function of the quarter periods K and Kc which in turn are determined by the value of the square modulus k2. Our main interest in this paper is to accentuate the physical meaning that these transformations have in the specific case of the simple pendulum, in our opinion this is a piece of analysis missing in the literature.
For our purposes the relevant mathematical result is that the congruence subgroup of level 2,
denoted as Γ(2), is of order six in Γ and
therefore a fundamental cell for Γ(2) can be formed from six copies
of any fundamental region
In a general context the duality symmetries we refer to, involve the special linear group
The structure of the paper is as follows. In Sec. 2 we summarize the real time solutions of the simple pendulum system in terms of elliptical Jacobi functions. The relations between solutions with real time and pure imaginary time in terms of the S group element of the modular group Γ are exemplified in Sec. 3 and the whole web of dualities is discussed in Sec. 4. We make some final remarks in 5. There are two appendices, Appendix A is dedicated to define the modular group, its congruence subgroups and its relation to double lattices whereas in Appendix B we give some properties of the elliptic Jacobi functions that are relevant for the analysis of the solutions of the simple pendulum.
2. Real time solutions
The Lagrangian for a pendulum of point mass m and length l, in a constant downwards gravitational field, of magnitude
where
This equation can be integrated once giving origin to a first order differential equation, whose physical meaning is the conservation of energy
Physical solutions exist only if
Analyzing the potential, it is concluded that the pendulum has four different types of
solutions depending of the value of the constant
Static equilibrium (
Oscillatory motions (
where the square modulus k2 of the elliptic functions is given
directly by the energy parameter:
Without loss of generality, in our discussion we consider that the lowest vertical point of the oscillation corresponds to the angular value
As an example we can choose x0 = K, so at the
time x = 0, the pendulum is at minimum angular position
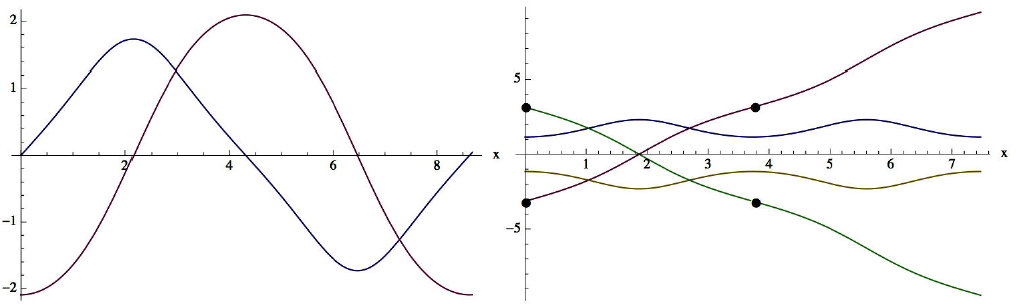
Figure 1. The first set of graphs represents an oscillatory motion of energy
Of course the value of x0 can be set arbitrarily and it is also
possible to parameterize the solution in such a way that at zero time
x = 0, the motion starts in the angle
● Asymptotical motion (
The sign
● Circulating motions (
where the global sign (+) is for the counterclockwise motion and the (-) sign for the motion in the clockwise direction. The symbol sgn (x) stands for the piecewise sign function which we define in the form
and its role is to shorten the period of the function sn(kE (x-x0), 1/kE ) by half, as we argue below. This fact is in agreement with the expression for the angular velocity ω(x) because the period of the elliptic function dn(kE (x-x0), 1/kE ) is 2K/kE instead of 4K/k E , which is the period of the elliptic function sn(kE (x-x0), 1/kE ).
The square modulus k
2 of the elliptic functions is equal to the inverse of the energy
parameter
It is interesting to notice that if we would not have changed the image of the arcsin function, the angular position function
The angular velocity is a periodic function whose period is given by
These are all the possible motions of the simple pendulum. It is straightforward to check that the solutions satisfy the equation of conservation of energy (4) by using the following relations between the Jacobi functions (in these relations the modulus satisfies 0 < k 2 < 1) and its analogous relation for hyperbolic functions (which is obtained in the limit case k = 1)
3. Imaginary time solutions and S-duality
The argument z of the Jacobi elliptic functions is defined in the whole complex plane
Writing this equation in dimensionless form requires the introduction of the pure imaginary time variable
which looks like Eq. (4) but with an inverted potential (see Fig. 2).
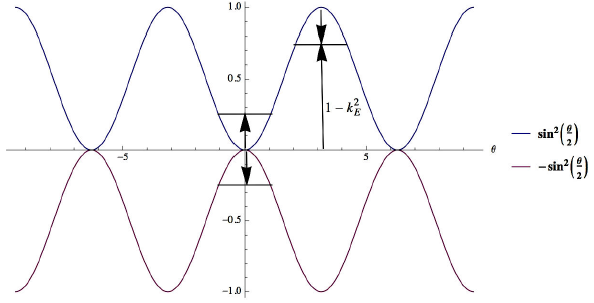
Figure 2. In the figure we show the pendulum potential (blue) for the dynamical motion parameterized with a real time variable. The inverted potential (magenta) corresponds to a dynamics parameterized by a pure imaginary time variable.
We can solve the equation in two different but equivalent ways: i) the first option consists in writing down the equation in terms of a real time variable and then flipping the sign of the whole equation in order to have positive energies, the resulting equation is of the same form as Eq. (4), ii) the second option consists in solving the equation directly in terms of the imaginary time y. Because both solutions describe to the same physical system, we can conclude that both are just different representations of the same physics. These two-ways of working provide relations between the elliptic functions with different argument and different modulus. As we will discuss the relations among different time variables and modulus can be termed as duality relations and because the mathematical group operation beneath these relations is the S generator of the modular group
3.1. Real time variable
If we write down (17) explicitly in terms of the real time parameter x, we obtain a conservation equation of the form
The first feature of this equation is that the constant E' is negative (E' < 0). This happens because as a consequence of the imaginary nature of time, the momentum also becomes an imaginary quantity and when it is written in terms of a real time it produces a negative kinetic energy. On the other side the inversion of the force produces a potential modified by a global sign. Flipping the sign of the whole equation and denoting
We have already discussed the solutions to this equation (see Sec. 2). However because we want to understand the symmetry between solutions, it is convenient to write down the ones of the circulating motions (9)-(10) relating the modulus of the Jacobi elliptic functions not to the inverse of the energy but to the energy itself, which can be accomplished by considering that the Jacobi elliptic functions can be defined for modulus greater than one. So we can write down both the oscillatory and the circulating motions in a single expression 13
Here the square modulus
3.2. Imaginary time variable
In order to solve Eq. (17) directly in terms of a pure imaginary time variable, it is convenient to rewrite the equation in a form that looks similar to Eq. (19), which we have already solved, and with this solution at hand go back to the original equation and obtain its solution. We start by shifting the value of the potential energy one unit such that its minimum value be zero. Adding a unit of energy to both sides of the equation leads to
The second step is to rewrite the potential energy in such a form it coincides with the potential energy of (19) and in this way allowing us to compare solutions. We can accomplish this by a simple translation of the graph, for instance by translating it an angle of π/2 to the right (see Fig. 2). Defining
Solutions to this equation are given formally as
Now it is straightforward to obtain the solution to the original Eq. (17), by going back to the original
In this last expression we are assuming that Eq. (15) is valid for every allowed value of the
energy
3.3. Equivalent solutions
In the following discussion we will assume without losing generality that
● Oscillatory motion: Let us consider oscillatory solutions for total mechanical energy
This result is very interesting, it is telling us that any oscillatory solution can be represented as an elliptic function either of a real time variable or a pure imaginary time variable and although they have the same energy, they differ in the value of its modulus. For solutions with real time the square modulus coincides with the energy
As discussed in Appendix B, the elliptic function
dn(z, kc ) has
an imaginary period 4iK, therefore the period of the imaginary
time oscillatory motion is
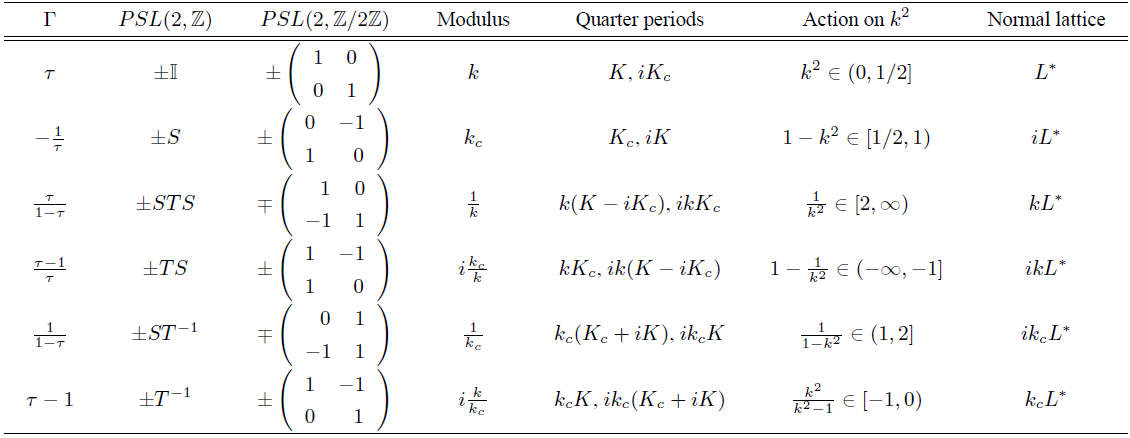
Table I. The third column shows the solutions to the simple pendulum problem in terms of a real time variable when the total mechanic energy of the motion and the square modulus of the Jacobi elliptic function are the same. The fourth column shows its S-dual solutions in terms of a pure imaginary time variable.

Two final comments are necessary, first in the general solutions (20) and (24) the
● Circulating motion: For the circulating motion we must also separate the energy intervals in two cases. If we are considering the solutions (20) which have real time variable, the corresponding energy intervals are
Notice that in a similar way to the oscillatory case, we have the following relations between the sum of the square modulus
Analogous relations can be found for the solutions with energy
3.4. S group element as member of
It is possible to reach the same conclusions as in the previous subsection but this time following a slightly different path. In Appendix B we have summarized the action of the different group elements of
● Oscillatory motion: In this case the starting point is the solution (5) and its time derivative (6) which depends on a real time variable and describe an oscillatory pendulum solution with energy
recovering relation (25) with their respective expressions for its time derivative. Notice that although the transformed functions have modulus kc they satisfy
which is telling that the solution is indeed of oscillatory energy
● Circulating case: In the circulating case we have a similar story, under an S transformation the circulating solutions (9)-(10) lead to the set
which coincide with the solutions (24) for a choice of the constant
4. Web of dualities
4.1. The set of S-dual solutions
We have argued that a symmetry of the equation of motion for the simple pendulum leads to the
possibility that its solutions can be obtained in two ways: i) considering a
real time variable and ii) considering a pure imaginary time variable. The
solutions for energies in the interval
The fact that the solutions involve either real time or pure imaginary time only, but not a
general complex time leads to the conclusion that although the domain of the
elliptic Jacobi functions are all the points in a fundamental cell, or due to
its doubly periodicity, in the full complex plane
We conclude that if we consider only solutions of real time variable such that the square modulus and the energy coincide (the four types of Table I), then the corresponding domains are horizontal lines on the normal lattices L*, iL*, kL*and iKcL*. If instead we consider the four solutions of pure imaginary time parameter, the corresponding domains are vertical lines on the normal lattices iL*, L*, ikL* and kc L*. However due to the fact that the modular group relates the normal lattices one to each other, we can consider less normal lattices and instead consider other Jacobi functions on the smaller set of normal lattices to obtain the same four group of solutions. We shall address this issue below.
4.2 The lattices domain
At this point it is convenient to discuss the domain of the lattices that play a role in the
elliptic Jacobi functions and therefore in the solutions of the simple pendulum.
As discussed in the Appendix A, the
quarter periods of a Jacobi elliptic function whose square modulus is in the
interval

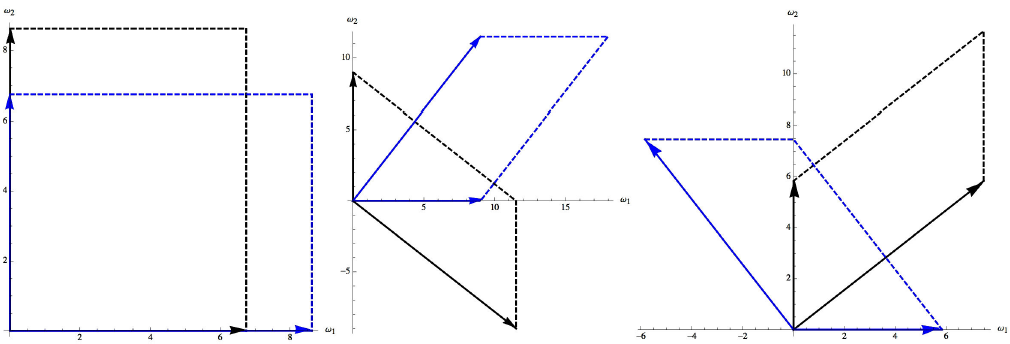
Figure 3. Figure shows the whole domain of values that the modular parameter τ
can take for the Jacobi elliptic functions. This domain is a subset
of the
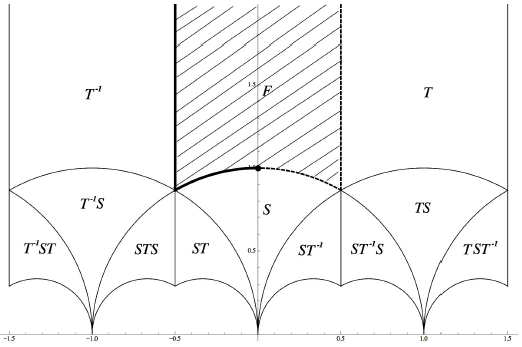
Figure 4. Tessellation of
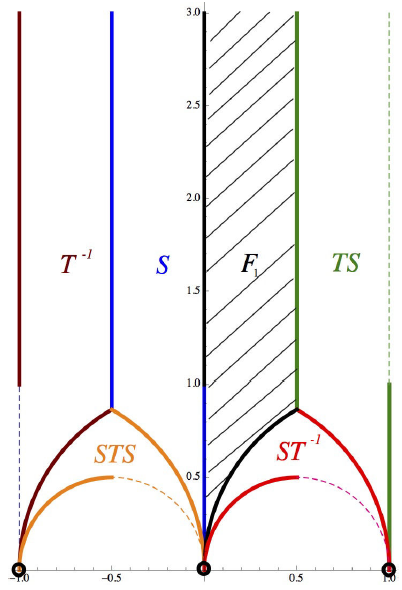
Figure 5. Fundamental cell
In Table II we give the numerical values (approximated) of the generators of the fundamental cell as well as the modular parameter for some values of the square modulus.
Table II. Approximated numerical values of the periods and the modular parameter for some real
values of the modulus of the Jacobi elliptic functions. The values
k = 0 and k = 1 correspond to
limit situations where one of the two periods is lost. The value
k2 = 1/2 is known as a fixed point,
it belongs both to the boundary of the regions

As a conclusion, for every value of the parameter
4.3. ST S-duality
The form of the solutions for the simple pendulum expressed in Table I does not coincide with the expressions given in Sec. 2, which by the way, are the standard form in which the solutions are commonly written in the literature. In order to reproduce the standard form it is necessary to introduce the ST S transformation (see Appendix B). This transformation takes for instance a Jacobi function with modulus 0 < k < 1 into a Jacobi function with modulus greater than one 1 < 1/k < ꝏ. Taking the inverse transformation it is possible to take a Jacobi function with modulus 1 < 1/k into one with modulus k < 1. Using the relations of the Appendix B it is straightforward to obtain Eqs. (B.35) which written in terms of k
E
instead of k (remember than in this case
Inserting this relations in the circulating solutions of Table I reproduce solutions (9) and (10).
What we have done is to use the ST S-duality between lattices and transform
two of them kL* and
ikcL*
into L* and iL*.
Restricted to solutions with real time, two of the four type of solutions for
which
4.4. A single normal lattice
It is natural to wonder about the minimum number of normal lattices needed to express all the solutions of the simple pendulum. Due to the duality symmetries between lattices this number is one. As an example, if we now use the S-duality to relate the normal horizontal lattice iL* to the normal vertical lattice L* , the horizontal lines that compose the domain in the horizontal lattice becomes vertical lines in the vertical lattices, which means to consider solutions with imaginary time in L * . Thus we can end up with only one normal lattice and in order to have the four different types of solutions, it is necessary to consider the whole domain of the lattice, i.e. both vertical lines (imaginary time) and horizontal lines (real time) and on each set of lines to consider two different solutions one oscillatory and one circulating. For completeness in Table III we give the four type of solutions in terms of only one value of the modulus.
Table III. Solutions to the simple pendulum problem written in a unique lattice of square modulus
0 < k2

It is clear that we can express all the solutions also for the other five different functional forms of the square modulus.
5. Final remarks
In this paper we have addressed the meaning of the fact that the complex domain of the
solutions of the simple pendulum is not unique and in fact they are related by the
It is well known that there are several physical systems in different areas of physics whose solutions are also given by elliptic functions, for instance in classical mechanics some examples are the spherical pendulum, the Duffing oscillator, etc., in Field Theory the Korteweg de Vries equation, the Ising model, etc., 12,18. It would be very interesting to investigate on similar grounds to the ones followed here, the physical meaning of the symmetries of the elliptic functions in these systems.