nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkPACS: 04.20.-q; 02.40.-k
1. Introducción
La separación o formalismo 3 + 1 es la descripción de un espaciotiempo cuadridimensional
Aunque en la literatura existen referencias más detalladas y extensas sobre este formalismo, como 1 y 4 por citar algunas, en este trabajo se enfatiza su utilidad como herramienta analítica, obteniendo las expresiones 3 + 1 más generales para operaciones como productos, trazas y derivadas de tensores arbitrarios. Con este fin, se introduce una notación especial para las proyecciones tensoriales, que permite sistematizar la manipulación de las expresiones típicamente engorrosas que aparecen en esta separación. Por lo demás, la notación y convenciones son consistentes con Wald 5, en particular la métrica del espaciotiempo
2. Nociones generales
La idea intuitiva detrás de la descripción 3 + 1 es la de interpretar el espaciotiempo como un objeto 3 dimensional que evoluciona de acuerdo con una noción particular de tiempo global. Al separar un espaciotiempo cuadridimensional tomando el tiempo como parámetro, se busca que el objeto que evolucione sea la métrica Riemanniana que define la distancia sobre una subvariedad tridimensional apropiada.
De manera mas precisa, se tratará únicamente con espaciotimepos globalmente hiperbólicos, que son aquellos que se pueden foliar por hipesuperficies de Cauchy
En el presente tratamiento se supondrá que la foliación y la función tiempo están dadas a priori, y se limitará a espaciotiempos globalmente hiperbólicos, para los cuales es posible tener una buena formulación de valores iniciales, que en pocas palabras i, se refiere a que el espaciotiempo está determinado unívocamente por los datos sobre una hipersuperficie de Cauchy, que son el equivalente relativista de datos a un tiempo inicial.
La métrica del espaciotiempo
Para completar el punto de vista dinámico para el espaciotiempo, es necesario definir una noción apropiada de evolución, es decir, establecer una manera de identificar no sólo puntos en una hipersuperficie de la foliación con puntos en otra hipersuperficie de la misma foliación, sino una manera de comparar campos tensoriales entre ambos puntos de la variedad.
El procedimiento general para hacer esto es el siguiente: dado un difeomorfismo
En el caso particular en cuestión, se desea que el flujo de
Para que el parámetro de las curvas
Luego, para todo
Por lo tanto, el grupo uniparamétrico de difeomorfismos
Es importante destacar que:
El campo vectorial ta no es necesariamente unitario, por lo que el parámetro
No se impone ninguna condición de ortogonalidad del campo ta respecto a las hipersuperficies de t constante.
La condición no determina al campo ta , lo cual es un hecho íntimamente relacionado con la libertad de norma de la teoría.
Respecto a este último punto, nótese que lo único que la condición (1) requiere es que existan coordenadas que tomen el valor de t en cada punto como coordenada tiempo, y que la base del espacio tangente en cada punto inducida por dichas coordenadas tenga a ta como el dual a (dt)a . Es decir, la libertad en la elección de ta se identifica con la libertad para escoger coordenadas que cumplan estas condiciones.
En este trabajo se adoptará el denominado punto de vista cuadridimensional1, en el que los campos tensoriales del formalismo siempre son cuadridimensionales y están definidos sobre
El punto de vista tridimensional requiere definir mapeos de proyección o
encajes entre
Habiendo establecido los elementos básicos de esta perspectiva, a continuación se procede a desarrollar el formalismo para campos tensoriales de acuerdo con esta separación, empezando por la descomposición de vectores y campos vectoriales en partes tangente y normal a la hipersuperficie.
2.1. Vectores y covectores tangentes a la hipersuperficie
Los vectores tangentes a la hipersuperficie
De aquí en adelante, se indicará con una tilde
Como la función t es constante sobre toda la hipersuperficie
Ʃt , la derivada de
t en la dirección de cualquier vector tangente a
Ʃt se anula. Por lo tanto,
cualquier vector tangente
Asímismo, un vector ortogonal a la superficie se define como un vector ortogonal a todo vector tangente a la hipersuperficie. Dado que la hipersuperficie Ʃt es homeomorfa a una variedad tridimensional, el subespacio de vectores ortogonales a ella es unidimensional.
De la Ec. (3), tenemos que el campo vectorial tipo tiempo
El signo se ha escogido de modo que el campo na
sea tipo tiempo dirigido al futuro. Entonces, dado un punto
Considerando esta separación punto a punto sobre Ʃt , se tiene que un campo vectorial ortogonal a Ʃt siempre se puede expresar como
donde
Por lo tanto, todo vector tangente a un punto p de Ʃt se puede expresar como la suma de un vector tangente a la hipersuperficie y un vector ortogonal a ella,
es decir, el espacio tangente a
donde
La extensión de esta separación para campos de covectores o 1-formas es directa. Un campo de
covectores
De aquí en adelante la tilde también se utilizará para indicar que un campo de covectores es tangente a Ʃt .
Análogamente, un campo
Considerando
y la Ec. (3), se tiene que todo campo de covectores ortogonales a Ʃt se puede expresar como
siguiendo un razonamiento análogo al caso de campos vectoriales.
Tal como ocurre para el espacio tangente al punto
donde
de modo que todo covector en
Nuevamente, esta separación se extiende al caso de campos aplicando estas reglas punto a punto sobre Ʃt .
Gracias a que se está trabajando en un espaciotiempo foliado por hipersuperficies
Ʃt , cada punto
A los campos que resultan de esta separación,
La componente normal de un campo vectorial y respectivamente de un campo de covectores están dadas por
lo cual se puede verificar contrayendo (6) con n a y con n a .
Las proyecciones tangentes se obtienen sustituyendo (15) y (16) en (6) y (14), respectivamente, quedando
donde
De (17) y (18) se tiene que los proyectores de vectores en el subespacio tangente
respectivamente. Nótese que estos tensores actúan como la identidad para vectores y covectores tangentes.
A partir de (15) y (16) se tiene que los proyectores de vectores en el subespacio tangente
respectivamente.
En términos de estos proyectores, se pueden reescribir (19) y (20) como las descomposiciones de la identidad para vectores
Las expresiones (6) y (14) indican cómo reconstruir vectores y covectores del espaciotiempo a partir de su proyección tangente (algebráicamente tridimensional) y su componente ortogonal (una función real), lo que justifica la denominación 3 + 1 de este formalismo. Asimismo, las expresiones (23) y (24) serán útiles para realizar la descomposición 3 + 1 de tensores de rango arbitrario.
Respecto al campo ta , es convencional denominar shift a su proyección tangente y representarla por Na , mientras que a su componente normal se le denomina función lapse y se le representa por N. Entonces, la descomposición 3 + 1 de ta es
De (1) se sigue que la función lapse también se puede expresar como
y de (25) que N sea el factor de normalización en la expresión (4), es decir,
Por lo tanto, na y N están determinados por la función t y la métrica del espaciotiempo, mientras que el shift Na depende de la elección particular del campo ta . En el Apéndice 7 se hace explícita la dependencia de estos campos en la expresión de un vector desde el punto de vista tridimensional.
2.2 Tensores de rango arbitrario.
La separación de los espacios de vectores o covectores en una parte tangente y una parte ortogonal expresada en (7) y (12), se puede generalizar para tensores de rango arbitrario a partir de su descomposición como producto tensorial de espacios de vectores y covectores. Por ejemplo, para el espacio de tensores (0, 2) definidos sobre un punto p de la hipersuperficie Ʃt , se tiene
Esta descomposición indica que todo tensor (0, 2), Tab , se puede separar como la suma de los siguientes términos:
Un tensor (0, 2) completamente tangente a la hipersuperficie, es decir, que se anula al contraerlo con el vector normal na en cualquiera de sus índices. A este término se le denotará colocando una tilde sobre el símbolo del tensor original,
El producto tensorial de na con un covector tangente,
El producto tensorial de un covector tangente,
Un escalar
Es decir, la separación 3 + 1 de un tensor (0, 2) es de la forma
Utilizando la descomposición de la identidad (24) para cada índice de Tab , es decir, escribiendo
y desarrollando cada identidad como en (24), se obtienen expresiones para cada uno de los tensores presentes en (29),
En este trabajo, a cada uno de los términos de (29) se les denominará proyecciones, y a los tensores tangentes de cada proyección, (31)-(34), se les denominará componentes de proyección.
La métrica inducida es un tensor (0, 2) tangente a la hipersuperficie que, actuando sobre dos vectores tangentes a la hipersuperficie, tiene la misma acción que la métrica del espaciotiempo. Es inmediato verificar que la proyección totalmente tangente de la métrica,
es el único tensor tangente a la hipersuperficie que cumple con estas condiciones.
Denotar la métrica inducida como hab es
consistente con la notación que se ha introducido para los proyectores
tangentes, en el sentido de que “
Nótese también que la métrica inducida permite subir y bajar índices de tensores tangentes a Ʃt , y
funge como operador métrica inversa, puesto que
Cuando se realiza la separación del espacio (co)tangente a
donde
Siguiendo esta lógica, en general para tensores tipo (k, l), se tendrá
donde el número total de proyecciones es 2 k+1 .
Aunque en la mayoría de aplicaciones comunes para el formalismo 3 + 1 basta con la
descomposición de vectores, covectores y tensores de rango 2, en situaciones
menos estándar, como en el estudio del acoplamiento de campos cuánticos con
gravedad, así como en el estudio de acciones efectivas para gravedad cuántica,
donde además de términos como
RabcdRabcd
y
RabRab
, se requiere el cálculo de derivadas superiores como
El crecimiento exponencial del número de proyecciones, al incrementarse el rango de los tensores, implica que, si se desea tratar con total generalidad la descomposición 3 + 1, es necesario primero sistematizar la nomenclatura de estas componentes de proyección.
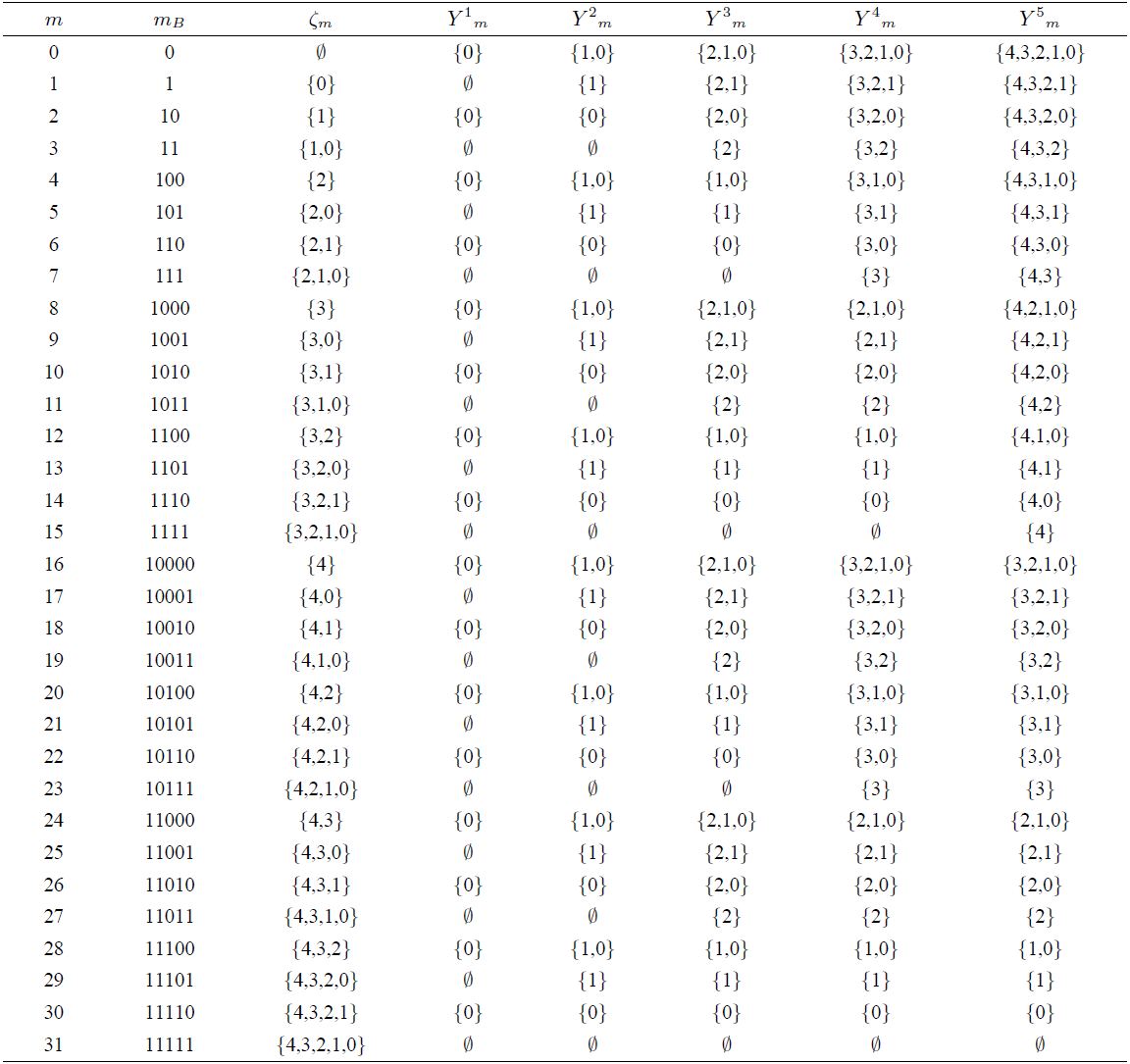
Por ejemplo, para el caso (0, 2), las cuatro proyecciones previstas son justamente cada uno de los términos de (29), y se puede utilizar una notación en la que a cada componente de proyección se le asigna un símbolo diferente, como los símbolos del lado izquierdo de las Ecs. (31)-(34). Sin embargo, para tensores de rango (0, l) con l > 2, deja de ser práctico denotar cada componente de proyección con un símbolo distinto, por lo que en su lugar, se asignará a cada proyección una etiqueta numérica entre 0 y 2 l - 1.
El primer paso para establecer una notación apropiada para este formalismo general será fijar reglas para la notación de los índices de todo tensor T del tipo (0, l). Sus índices se etiquetarán de modo que indiquen su posición respecto al índice más a la derecha, por lo que un tensor (0, 2) se expresará como
y en general, el conjunto de etiquetas de índices para un tensor (0, l) será
por lo que bajo esta convención, este tipo de tensor se expresará como
A continuación establecemos cómo se asigna una etiqueta m a una proyección dada. Sea
Ésto no es más que la notación desarrollada en base dos de m, por lo que los conjuntos
y así sucesivamente. Recíprocamente, a partir de un conjunto
La receta para asignar etiquetas a una proyección 3 + 1 de un tensor será la siguiente: Etiquete los índices del tensor como en (42) y construya el conjunto
Esta convención no resulta intuitiva, pero es una manera simple de etiquetar proyecciones directamente, si se considera la siguiente regla visual: Sustituya cada índice de n por un número “1”, y asigne al resto de los índices, que pertenecerán a la componente de proyección tangente, dígitos “0”. Escriba los dígitos en el orden original de los índices correspondientes en el tensor no desarrollado, (42). Lo que se obtiene es la notación binaria del número m que le corresponde a la proyección en cuestión.
Por ejemplo, denotando por un subíndice B a un número en notación binaria, se tendría en (29),
Al conjuntoiii que contiene las etiquetas de los índices proyectados de manera tangente se le denota por
Finalmente, la proyección m de un tensor T de tipo (0, l) se denotará como
Se puede simplificar aún más esta expresión si se considera la siguiente notación multiplicativa por conjunto de índices, exclusivamente para proyectores,
donde A es un conjunto de etiquetas de índices. Para el resto de los tensores, se define una notación abreviada para conjuntos de índices:
es decir,
Haciendo uso de esta notación, la proyección m de un tensor (0, l) se expresa como
las componentes de proyección se expresan como
y en general, la descomposición 3 + 1 de un tensor (0, l) se expresa como
Nótese que la m-ésima componente de proyección es un tensor tangent (0, l - z), con z el número de elementos en
Esta convención de notación se generaliza directamente para tensores de tipo (k, l), tomando el valor posicional de los índices como etiqueta, independientemente de si son índices “covariantes” o “contravariantes”.
Se conservará la convención de denotar por una tilde a la proyección completamente tangente
de un tensor, correspondiente a la proyección identificada por el número 0 (por
ejemplo
2.2.1. Simetrización y antisimetrización de índices
Se ha establecido una convención donde la posición de los índices juega un papel importante, por lo que hay que tener cuidado de realizar cualquier intercambio de etiquetas de índices después de que se hayan etiquetado las componentes. Por ejemplo, el tensor
y para expresar su simetrización,
se deber tomar en cuenta primero el etiquetado de componentes dado en (49) y después el intercambio
es decir,
De manera análoga, la antisimetrización de los índices de este tensor en forma 3 + 1 será
Nótese que en este caso la proyección con etiqueta m=3 se ha cancelado idénticamente porque involucra antisimetrizar el producto simétrico
Si se tiene un tensor (0, l) arbitrario, y se desea simetrizar o antisimetrizar el conjunto de sus índices etiquetados por los elementos del conjunto ordenado S (en el caso anterior, S= {1,0}), entonces es necesario primero establecer una convención para expresar las permutaciones involucradas.
Una permutación p sobre un conjunto ordenado S es una
regla que intercambia k elementos del conjunto entre sí. Si
s es el número de elementos en S,
entonces el número total de permutaciones de sus elementos es
s!. Estas posibles permutaciones pueden ordenarse de
diversas maneras, pero el ordenamiento concreto no es relevante, y basta con
utilizar una regla consistente para enumerar las permutaciones. A la
i-ésima permutación del conjunto S se
le denotará por
Considerando estas convenciones, la expresión general para la m-ésima proyección de un tensor T(0,l) simetrizado en los índices con etiquetas S estará dada por
mientras que la antisimetrización correspondiente será
2.2.2. Productos y contracciones
Si se tienen dos tensores, A de tipo (0, lA ), y B de tipo (0, lB ), el producto tensorial de éstos estará dado por
Entonces, la m-éstima componente de proyección estará dada por
donde
La contracción de los índices con etiquetas j y k de un tensor
y para preservar la consistencia de la notación, los índices se deberán volver a etiquetar en el orden estándar tras omitir los índices que se han contraído, es decir, aquellos con las etiquetas i y j. A esta transformación le denominaremos transformación de traza para los fines de esta sección.
Entonces, la m-ésima componente de proyección de una contracción será
donde
Por ejemplo, si se contraen los índices 0 y 2 de un tensor (0,4), la transformación de traza corresponde al siguiente mapeo:
Así, los conjuntos
Entonces, la expresión (58) en este caso produce
Para un tensor
Para construir la contracción de dos tensores, primero se calcula el producto tensorial de ambos, y después la contracción sobre los correspondientes índices. Sin embargo, una fórmula explícita en este caso no resulta de gran utilidad, ya que es más eficiente calcular esta contracción de manera directa.
Una aplicación que motiva expresiones como (56) y (58), y en general la introducción de una notación especial para todas las proyecciones, es que pueden ser implementadas computacionalmente para obtener expresiones 3+1, en principio, para cualquier tensor covariante, permitiendo manipulaciones de otro modo extenuantes.
Además, estas expresiones permiten obtener fórmulas útiles para aplicaciones típicas de este formalismo, como el cálculo del tensor de Ricci a partir del tensor de Riemann, mediante la expresión (59), obtenida directamente de (58).
3. Geometría Diferencial en el formalismo 3+1
La geometría intrínseca de la hipersuperficie se construye a partir de la métrica inducida hab sobre la hipersuperficie Σt , y su derivada asociada, Da , que cumple con la condición de compatibilidad con esta métrica,
así como la propiedad de no-torsión,
para toda función escalar f sobre Σt .
La curvatura intrínseca de Σt está caracterizada por el tensor de Riemann correspondiente a la métrica inducida sobre la hipersuperficie, que está definido por su acción sobre covectores tangentes como
y puede mostrarse 5 que consta de combinaciones de derivadas de hasta segundo orden de la métrica hab . Más adelante se mostrará su relación con el tensor de Riemann del espacio-tiempo.
Debe tenerse en cuenta que la geometría intrínseca de sólo una hipersuperficie no contiene la información sobre la geometría de todo el espaciotiempo, ya que, como es de esperarse de un sistema de ecuaciones diferenciales de segundo orden, se requiere como mínimo, la información del cambio de su geometría al pasar de una hipersuperficie a otra, o en otras palabras, la derivada de la métrica respecto al parámetro t. Esta información está contenida justamente en la curvatura extrínseca.
3.1. Curvatura extrínseca
Una forma de caracterizar la geometría del espaciotiempo en una región dada es en términos de una congruencia geodésica, que es una familia de geodésicas tipo tiempo tales que en cada punto de esa región pase una y sólo una geodésica de dicha familia. Tomando una geodésica de la congruencia como referencia, se describe el comportamiento de las geodésicas adyacentes al evolucionar de acuerdo al parámetro afín de la curva, es decir, su tiempo propio.
Los vectores tangentes a la congruencia conforman un campo
y es de norma constante,
donde esto último implica que
Considerando (64) y 66, se tiene que
es un tensor ortogonal a
El teorema de Frobenius garantiza que si
Por lo tanto,
es un tensor simétrico y tangente a Σt al que se denomina curvatura extrínseca. Kab mide qué tanto deja de ser “normal” el vector na al transportarlo paralelamente sobre la hipersuperficie de un punto a otro punto cercano.
El tensor Kab contiene la información sobre la evolución de la métrica de una superficie a otra, ya que 2Kab es precisamente la derivada de Lie iv de la métrica inducida en la dirección de na , es decir,
4. Operadores derivada
Como se mencionó anteriormente, a la métrica inducida sobre Σt está asociada una derivada Dc que cumple con el requisito de compatibilidad métrica con hab , Ec. (61). Esta derivada está dada por la expresión
Nótese que Da no es una derivada covariante del
espacio-tiempo, pues sólo se comporta como derivada cuando actúa sobre campos
tensoriales tangentes a la hipersuperficie, ya que para campos tensoriales que no
son tangentes a Σt , en general no
cumple con la regla de Leibniz, puesto que el campo tensorial resultante siempre es
tangente a Σt . Por ejemplo, al actuar
sobre
Esta derivada codifica la componente tangente de la variación de un tensor ante desplazamientos en una dirección tangente a la hipersuperficie, es decir, contiene la información disponible sobre la variación del tensor en términos de datos sobre la hipersuperficie.
Nótese que Kab es justamente la derivada de na asociada a la métrica inducida, es decir,
La descomposición 3+1 de la derivada covariante de una función escalar se puede expresar haciendo uso de la derivada recién definida mediante la Ec. (14), quedando
donde
El operador đ no es más que un “atajo” definido por conveniencia debido a la frecuencia con que en este formalismo aparece la derivada en la dirección normal
Al aplicar đ a un tensor tangente, este no permanece tangente, por lo que es
necesario volver a desarrollar sus proyecciones para recuperar una expression 3+1.
Se utilizará el símbolo
En general,
Esta derivada está directamente relacionada con la derivada de Lie bajo el flujo de
Finalmente, siempre es posible realizar la sustitución
que constituye informalmente la descomposición 3+1 del índice de la derivada covariante, pero es importante enfatizar que el segundo término del lado derecho todavía debe desarrollarse en forma 3+1 sobre sus demás índices cuando se aplica a un tensor para tener una expression 3+1, que será el tema de la siguiente sección.
5. Separación 3+1 de las derivadas de tensores.
En esta sección se desarrolla la descomposición 3+1 de la derivada covariante de un tensor
de modo que la derivada covariante de na queda expresada en forma 3+1 como
El campo vectorial ua aparece en referencias como 4 y 1, generalmente en términos de la derivada del logaritmo de la función Lapsevi,
o de la propia derivada de Lie de n, ya que se puede mostrarvii que
Físicamente, ua puede interpretarse (salvo por un signoviii) como la 4-aceleración de una familia de observadores, como se muestra en el Apéndice 7.
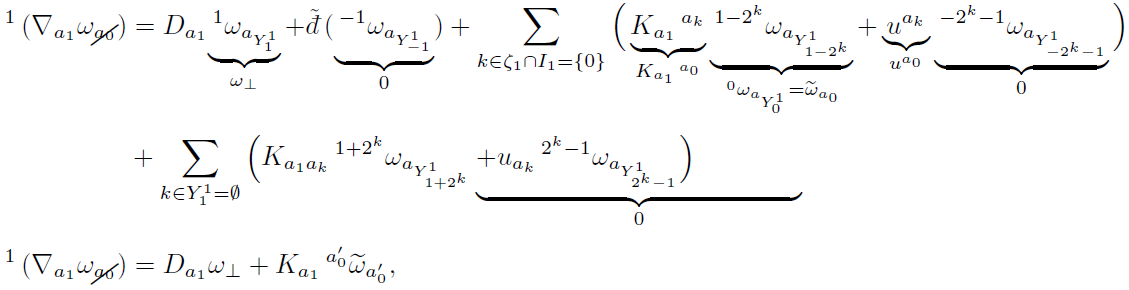
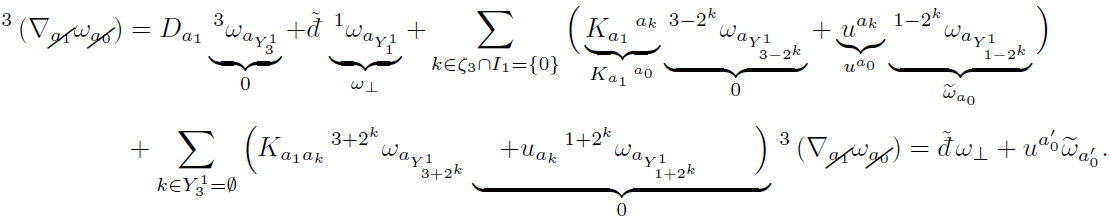
La derivada covariante de un tensor arbitrario incluye información tanto de la variación del tensor como de la curvatura del espaciotiempo, así que su expresión general en el formalism 3+1 debe incluir la derivada de la métrica inducida, es decir, la curvatura extrínseca, además de la propia variación del tensor sobre la hipersuperficie. Por este motivo, es necesario primero descomponer en forma 3+1 la derivada covariante de la métrica inducida,
así como la del proyector
A partir de la descomposición 3+1 de un tensor
Las etiquetas de las componentes de proyección resultantes indican, para el primer término
dentro del paréntesis, que el k-ésimo índice, que antes era
normal, ahora es tangente y por lo tanto corresponde a la
componente de proyección con etiqueta
Como además, cada componente de proyección es tangente, éstas se pueden desarrollar, redundantemente, como
El motivo para realizar este desarrollo es que permite obtener automáticamente una expresión 3+1 al aplicar la derivada covariante a
 (85)
(85)
donde los términos de la segunda línea de se han cancelado en cada término puesto que los índices primados van contraídos con el tensor tangente
A continuación se sintetiza el procedimiento de escribir la derivada covariante de un tensor arbitrario en forma 3+1. Al calcular la derivada covariante de la expansión 3+1 general, Ec. (48), se tendrá
y sustituyendo (83) y (85) en (86) se obtiene

donde al reagrupar los términos por componente queda finalmente la expresión
La fórmula (87) se puede aplicar, por ejemplo, para calcular la derivada de un covector. Para ello, se calcula cada componente de proyección por separado,
 (88)
(88)
 (89)
(89)
 (90)
(90)
 (91)
(91)
En estas expresiones, las componentes de proyección se muestran con los índices normales cancelados en el lado izquierdo para mantener la consistencia de la notación a ambos lados de la igualdad. Finalmente, al realizar la suma de los términos (88)-(91) de acuerdo con la expresión (87), se obtiene la descomposición 3+1 de la derivada covariante de un covector,
 (92)
(92)
Utilizando este mismo procedimiento para un tensor de rango (0,2), se obtiene la descomposición 3+1 de
 (93)
(93)
donde sus componentes de proyección son
Aquí se ha empleado la notación de las Ecs. (29)-(34) para las componentes de proyección de
En la siguiente sección se empleará el formalismo hasta aquí desarrollado para calcular los tensores de Riemann y Ricci del espaciotiempo en términos de los tensores de Riemann y Ricci sobre la hipersuperficie, así como la métrica inducida, el tensor de curvatura extrínseca y el campo de vectores normales y sus derivadas.
6. Tensores de curvatura y ecuación de Einstein
6.1. Tensor de Riemann
El tensor de curvatura de Riemann
Rabcd
se define 5 en términos de su
acción sobre un campo de covectores
Este tensor caracteriza la curvatura de una variedad en el sentido de que su anulacion en cualquier región del espaciotiempo es condición necesaria y suficiente para la existencia de coodenadas en las que la metrica toma la forma minkowskiana (es decir,
Tomando en cuenta que se está empleando la conexión métrica sin torsión, este tensor cumple con las siguientes propiedades,
donde a (106) se le denomina identidad de Bianchi. A partir de estas propiedades, también se puede derivar la siguiente simetría para el tensor de Riemann covariante,
El procedimiento que se empleará para expresar el tensor de Riemann en forma 3+1 a partir de su definición, será el siguiente:
1. Expresar en forma 3+1 al tensor
2. Antisimetrizar Bbcd sobre los índices b y c, de modo que se tiene
3. Considerando los casos en que
4. El resto de las componentes se obtienen a partir de las propiedades y simetrías del tensor de Riemann (103)-(107).
A continuación se detallan cada uno de estos pasos.
Retornando a la notación de índices usualix, la expresión para
El siguiente paso es antisimetrizar los primeros dos índices de Bbcd , en donde todas las proyecciones que son simultáneamente normales a Σt en los índices b y c se anulan, quedando el desarrollo 3+1 de B[bc]d como
siendo las componentes de proyección relevantes,
Donde (3)Rbcde es el tensor de Riemann correspondiente a la metrica inducida sobre la hipersuperficie, previamente definido en (63). Las demás componentes de proyección se obtienen de intercambiar índices y signos, a partir de estas componentes, de modo que se puede reescribir (108) como
Las componentes de proyección del tensor de Riemann serán entonces,
notando que se trata de un tensor de rango (1,3), por lo que para emplear las expresiones (118)-(121) considerando la etiqueta de componente que les asigna la expresión (122), es necesario incrementar en uno el valor posicional de todas las componentes, re-etiquetando cada una de ellas de acuerdo con la regla
donde q = 0 ó q = 1 dependiendo de si
y de aquí que,
Nótese que esta ecuación se puede reescribir como
A esta ecuación se le denomina primera relación de Gauss-Codacci, y relaciona al tensor de Riemann de la métrica inducida sobre la hipersuperficie, que representa a la curvatura intrínseca de Σt , el tensor de curvatura extrínseca y el tensor de Riemann de la métrica del espaciotiempo.
Cuando el covector es ortogonal,
de donde se lee
Siguiendo un procedimiento análogo para las demás componentes de proyección de Bbcd , se obtienen las siguientes componentes de proyección del tensor de Riemann,
El último paso es obtener las componentes de proyección faltantes a partir de las proyecciones (124)-(129). Las componentes de proyección 3Rbc y 7Rb se cancelan idénticamente debido a que las propiedades (103) y (107) implican para estas proyecciones la antisimetrización de índices nulos. Asimismo, aplicado directamente la propiedad (107), se obtiene la componente con etiqueta m = 4,
y el resto de las componentes se pueden obtener a partir de la propiedad (103),
Con esto concluye el desarrollo 3 + 1 del tensor de Riemann, pues se han expresado todas las componentes de proyección presentes en (123). Las componentes de proyección que no aparecen en (123) son idénticamente nulas debido a las simetrías del tensor de Riemann.
6.2. Tensor de Ricci y escalar de curvatura
A partir del desarrollo 3 + 1 del tensor de Riemann, es directa la expresión 3 + 1 del tensor de Ricci,
gracias a la fórmula (59),
Sustituyendo las expresiones (124)-(134), se obtiene finalmente
A la Ec. (138) se les denomina segunda relación de Gauss-Codazzi porque relaciona el tensor de curvatura extrínseca de la hipersuperficie con el tensor de curvatura de Ricci del espaciotiempo.
Gracias a la fórmula (60), se obtiene inmediatamente una expresión en términos de los objetos del formalism 3 + 1 para el escalar de curvatura de Ricci,
es decir,
6.3. Ecuación de Einstein
Considerando la descomposición del tensor de Ricci, Ecs. (138), (139), (137), y del escalar de curvatura, (141), se puede expresar el tensor de Einstein
en forma 3 + 1,
Suponiendo que la separación 3 + 1 para el tensor momento energía es de la forma,
donde Sab ,
ja y
equivale a las ecuaciones
Como las Ecs. (148) y (149) representan condiciones para la métrica inducida y sus derivadas en cada hipersuperficie, a menudo se les denomina ecuaciones de constricción. Éstas resultan de especial interés puesto que son más fáciles de resolver que el sistema completo (146), y, para campos de materia apropiados, la existencia de dichas soluciones sobre una hipersuperficie Σ garantiza, dada la existencia de una buena formulación de valores inicialesxi, la existencia y unicidad de una solución para todo el espaciotiempo.
7. Conclusiones
En este trabajo se ha presentado una reseña de los aspectos generales del formalism 3 + 1, y se han introducido convenciones y notación especialmente adaptadas para éste, que facilitan el tratamiento sistemático de todas las proyecciones involucradas y la manipulación de expresiones de uso frecuente en Relatividad General.
Haciendo uso de éstas herramientas se han derivando fórmulas explícitas y generales para productos tensoriales (56), simetrización (53), antisimetrización (54) y contracción de índices (58), así como para la derivada covariante (87). Asimismo, se han obtenido todas las proyecciones del tensor de Riemann (124)-(134), del tensor de Einstein (143)-(145), y las relaciones de Gauss-Codacci (125)-(138).