










Servicios Personalizados
Revista
Articulo
 Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkIngeniería mecánica, tecnología y desarrollo
versión impresa ISSN 1665-7381
Ingenier. mecáni. tecnolog. desarroll vol.3 no.2 México mar. 2009
Artículos
Virtual Assembly Rapid Prototyping of Near Net Shapes
1 Lim Theodore, 2 Medellin Hugo, 1 Sung Raymond, 1 Ritchie James 3 & Corney Jonathan
1 Mechanical Engineering Department, Heriot-Watt University, Edinburgh, Scotland, UK
2 Área Mecánica y Eléctrica, Facultad de Ingeniería, Universidad Autónoma de San Luis Potosí, S.L.P., México.
3 University of Strathclyde, Glasgow, Scotland, UK
Fecha de recepción: 18-02-08
Fecha de aceptación: 28-03-09
Abstract
Virtual reality (VR) provides another dimension to many engineering applications. Its immersive and interactive nature allows an intuitive approach to study both cognitive activities and performance evaluation. Market competitiveness means having products meet form, fit and function quickly. Rapid Prototyping and Manufacturing (RP&M) technologies are increasingly being applied to produce functional prototypes and the direct manufacturing of small components. Despite its flexibility, these systems have common drawbacks such as slow build rates, a limited number of build axes (typically one) and the need for post processing. This paper presents a Virtual Assembly Rapid Prototyping (VARP) project which involves evaluating cognitive activities in assembly tasks based on the adoption of immersive virtual reality along with a novel non-layered rapid prototyping for near net shape (NNS) manufacturing of components. It is envisaged that this integrated project will facilitate a better understanding of design for manufacture and assembly by utilising equivalent scale digital and physical prototyping in one rapid prototyping system. The state of the art of the VARP project is also presented in this paper.
Keywords: Virtual Reality, rapid prototyping, assembly planning, near net shape.
Resumen
La realidad virtual (por sus siglas en ingles VR) proporciona otra dimensión para muchas aplicaciones en ingeniería. Su naturaleza inmersiva e interactiva permite utilizar un método intuitivo para estudiar o analizar actividades cognitivas y evaluación del desempeño. La competitividad en el mercado significa lograr de manera rápida productos que cumplan las características de forma, dimensiones y funcionalidad deseadas. Las tecnologías de prototipado y manufactura rápida (por sus siglas en inglés, RP&M), están incrementando su uso en la producción de prototipos funcionales y la manufactura directa de componentes pequeños. A pesar de su flexibilidad, estos sistemas tienen algunas desventajas o limitantes tales como la velocidad baja de producción, un número limitado de ejes o direcciones de construcción (típicamente uno) y la necesidad de un post-procesamiento después de su construcción. Este artículo presenta un proyecto denominado Virtual Assembly Rapid Prototyping (VARP) el cual involucra la evaluación de actividades cognitivas durante la realización de tareas de ensamble en un ambiente de realidad virtual y utilizando una técnica novedosa de prototipado rápido de forma casi final (near net shape, NNS) la cual no utiliza una descomposición en capas. Se contempla que este proyecto integral facilitará el entendimiento del diseño para manufactura y ensamble mediante la integración del prototipado virtual y el prototipado físico en un solo sistema de prototipado rápido. El estado del arte del proyecto VARP también se presenta en este artículo
Palabras clave: Realidad virtual, prototipado rápido, planeación del ensamble, forma casi final.
Introduction
The success of a manufacturing business enterprise not only requires short product inception but also necessitates the integration of engineering, marketing and production components. Therefore it is important that manufacturing planning and analysis methods work within the framework of the product design cycle (McLeod, 1988). To improve the value added to a product, technology development is critical and tools such as virtual reality (VR) and rapid prototyping (RP) can provide combined advantages to manufacturing enterprises.
Rapid prototyping is a manufacturing process where pre-production models are built to test various aspects of a design's functionality. RP is an additive process in which parts are built by adding material layer upon layer as opposed to traditional techniques such as machining which is subtractive (i.e. removing material). Wholers (2006) indicated that 27.3% of the RP parts are used as functional models and fi t and assembly, meanwhile, visual applications account for 26.3%. More than 29% of customers use the parts for tooling components, such as mould inserts, and patterns for urethane and metal castings. Meanwhile, rapid manufacturing—the direct production of fi nished goods from additive fabrication—account for 9.6%.
The creation of assemblies is also fundamental to modern manufacturing economies. Indeed, around 40% of a product's cost has been attributed to the assembly stage (Massie ans Salisbury, 1994). Assembly planning traditionally has been an intuitive, heuristic and lengthy process based upon the skills and subjective experience of an 'expert' planner. This expert produces a formal assembly plan usually after most of the important design, and manufacturing decisions are finalised.
This paper presents how VR can be used as a tool to evaluate and improve the effi ciency of the RP process. It briefly outlines the current state-of-the-art in assembly planning research and describes an investigation into the use of Virtual Environments (VEs) to address this problem. This has led to the proposal of a novel approach utilising immersive Virtual Reality to enhance the assembly expert's role during the planning process. A novel non-layered RP&M technique based on direct interaction with 3D solid models, CNC and robotic assembly is then outlined; the system under development, referred to as RPBloX, has the potential to either supplement current RP techniques or act as a standalone method. Although both feasibility studies are being investigated separately, they are integrated to form the Virtual Assembly Rapid Prototyping (VARP) test bed.
Research Related Work
Traditionally assembly plans were generated only after the product design had been completed, approved and authorized. Assembly guidelines typically comprise a combination of experiential, analytical and theory-base recommendations. Human factors are decisive in assembly rationalization. In the last years, assembly planning has been subject to signifi cant research efforts with most work concentrating on attempting to semi- or automate the sequencing process. Bekey (1991) reports that these efforts have had limited success outside the research community. This is due to a number of reasons:
• Algorithms are computationally expensive for realistic assemblies.
• Narrow selection criteria means multitude of sequences generated by such systems detract from the credibility of the results.
• There is a natural delay in the transfer of knowledge to industry.
Common research relating to assembly planning automation includes sequence representation, generation, evaluation and optimisation; process accuracy and effi ciency, and motion planner integration (de Mello and Sukhan, 1991). Assembly sequence generation has primarily focused on algorithms for the fast and effi cient generation of feasible assembly plans. Most of the assembly sequence generators transform the problem of generating assembly sequences into the problem of generating disassembly sequences. To evaluate the feasibility of an assembly sequence, various issues must be considered: geometrical, mechanical, manipulability, accessibility, stability, visibility, and material. The geometrical feasibility is one of the most important criteria to evaluate an assembly sequence because it validates collision between parts (Medellín, Corney, Ritchie, Lim and Davies, 2007). Bourjault (1984) made a signifi cant early contribution to assembly planning by proposing an interactive method based on liaison precedence to generate all valid assembly sequences for a product. Homem and Sanderson (1990) used AND/OR graphs to show all the possible assembly operations including sub-assembly confi gurations, thus substantially reducing the size of the data tree required to represent the full set of assembly sequences. Disassembly analysis is also claimed as an attribute of this approach. Latombe et al. (1 197) described assembly sequencing as "intractable" and claim that this has caused contemporary researchers to restrict their work to small areas of interest in the fi eld limited to small assembly families with tightly controlled product representations.
In terms of optimising sequences Baldwin et al. (1991) reduce the number of sequences by displaying different components in their assembled state on a computer screen; users then choose and delete the undesirable ones. This work is taken a step further by Wilson (1995) who uses a CAD model to answer most of the precedence type questions then the user eliminates interactively, undesirable states. He contends that, for the foreseeable future, human intuition is necessary to make decisions on some of the assembly constraints. It can be noted in passing that the systems described based on interrogation of CAD models are generally concerned with assemblies comprising rigid components. This is a significant limitation in the long run when it is remembered that many assemblies include flexible and deformable components; a prime example in electro-mechanical products is the cable harness.
Automation of process planning in RP is also an emerging research topic. In RP a significant amount of human intervention is required to produce an optimal part, a feature of the process similar to assembly planning. Process planning is therefore required to determine build orientation, support and part specific fixturing or tooling, to generate slicing and selection process parameters and to minimise human intervention (Bourdell, Beaman, Marcus and Barlow, 1990).
The use of VR tools has been recently introduced to provide three-dimensional input and stereoscopic viewing to perform, verify, and plan the assembly of components, and for training purposes. Virtual reality environments offer a more natural, powerful, economic, fl exible platform than a traditional engineering environment to support assembly planning (Nong, Prashant, Amarnath and Fred, 1999). Several investigations into virtual environments for design and assembly tasks make extensive use of advanced computer graphics. However, screen-based CAD/CAM, which only stimulates the visual senses, has made actual physical contact during product development an increasingly rare occurrence. Engineers still find the sensation of handling a physical prototype or experiencing manufacturing processes useful and intuitive; indeed, hands-on experience reinforces the understanding of the physical, operational and visual aspects of engineered items (Lim, Ritchie, Dewar, Corney, Wilkinson, Calis, Desmulliez and Fang, 2007). To facilitate this, the sense of touch and kinesthesia have been introduced in computer based design and manufacturing environments by using haptic devices, (for instance see Howard, Vance(2007) and Garbaya, Zaldivar(2007)), which enables manual force-feedback interaction with virtual environments or teleoperated remote systems. Force feedback devices, such as SensAble's Phantom Haptic Device, Massie and Salisbury( 1994) has been a research topic in the development of advanced computer-aided design systems, gaming and other simulated environments. However, very little work has been done towards the development of haptic human-computer interface for assembly process planning.
Virtual Reality in Rapid Prototyping and Assembly
Immersive VR is an attractive option since it offers the user a sense of being immersed in the data where objects have a sense of 'presence', Lanzagorta, Rosenberg, Rosenblum and Kou (2000), and allows them to interface with the data at full scale if required. A design, after all, begins with an image or idea and the concept is disseminated via hand gestures, diagrams and descriptive speech. Depending on the industry, it is almost certain that pre-production prototypes are required, either as virtual or physical artefacts. These prototypes can be near net shapes. Cost is always a factor and whilst a physical prototype may ultimately be needed, its virtual counterpart is studied to improve product design, quality and performance, assembly and other issues. This reduces manufacturing risks of prototypes early in the product development cycle, and consequently reduces the number of costly design-build-test cycles, Choi and Samavedam (2001).
The quality requirements in RP demand a signifi cant degree of expertise, especially where consistency is concerned. Design by virtue is an iterative process and building prototypes can be costly, often based upon trial-and-error. Although computer based manufacturing systems provide useful tools to prove conceptual designs its interaction is usually limited to a 2.5D plane.
So can VR be benefi cial to the RP process and who needs it? VR has been suggested as a complementary technology to RP, Gibson, Brown, Cobb and Eastgate (1993). It is expected that the attributes of VR and RP will lead to more effi cient product development. Another contribution of VR in RP is the visualisation of support structures and for correcting STL List fi les, Fadel, Crane, Dooley and Geist (1995), Morvan ans Fa-del (1996). Surveys and review articles have indicated that virtual prototyping is both attractive and benefi cial, Zheng, Chan and Gibson (1998), Zorriassatine, Wykes, Parkinn and Gindy (2003). For novice RP-users, virtual environment systems would help them gain a better global view of RP technology. The virtual environment can also assist take in of well-founded decisions for investment or even outsourcing of RP tasks to meet the quick and diverse appearance of new and improved processes. However, it is the contention of this paper that VR has an important role to play as a front end to the development of physical prototypes, especially in the assembly-planning domain.
An important observation from the plethora of literature on process planning systems is the lack of practical use in industry. Although academically challenging and effective for tightly restricted or very simple families of assemblies, the nature of the work is such that industrial testing is seldom attempted. Burgoyne and Murray (1989) describe some early solutions to the problems of applying modelling in industrial situations and reusing CAD and other design information. This is typical of how many companies have since applied multi-media and other modern 3D CAD tools to their assembly planning solutions. The systems developed certainly make good use of the interactive nature of computer software but do not incorporate assembly intelligence, assembly intent or any means by which assembly sequences can be automatically generated during or after assembly planner use.
Work by Ritchie et al (1999), has shown that immersive VR can be used to effectively generate assembly sequences and process plans. It was also apparent that, in comparison to CAD environments, immersive VR offered an unrestrained, real-time means of interaction at full scale; other scales being possible if necessary. The system utilised 3D CAD models and user interaction as its key inputs. The combination of the latter including the recording activities carried out during the virtual assembly process forms the basis for VARP.
Virtual Assembly Rapid Prototyping
VARP is essentially being developed on two fronts, i.e. rapid prototyping and virtual assembly. The signifi cance of VARP is in the utilisation of VR to support the design and rapid prototyping of large scale prototypes. The platform also addresses issues relating to design for manufacture and assembly (DFMA) while human factors are considered by evaluating cognitive activities as the user interacts within the virtual environment.
Rapid Prototyping with RPBLOX
RPBloX follows the use of conventional workshop machinery and technology, Lim, Corney, Ritchie and Davies (2002), Lim, Corney, Ritchie and Davies. The RPBloX methodology involves a cellular approach to building up a part. Rather than slicing up the CAD model into numerous thin sheets, RPBloX segments the model into 3D cells (or Blox) of varying sizes. One of the main advantages of the RPBloX system over other RP techniques is the reduction of the build time especially when large and/or tick wall components are fabricated. Consequently, production costs could be signifi cantly reduced without the forfeiting accuracy and timeliness.
RPBloX architecture
The architecture has three main steps: discretization of 3D models into Bloxs; perform DFMA; generate machining and robotic assembly code for manufacturing. The user interface allows interactive decomposition of a digital model, assembly sequencing and modifi cations to Blox units. The architecture is open and additional functions to support manufacturability and assembly assessment can be easily added. For example, a fitness test can be applied to the Blox set to determine which Blox within the set would pose manufacturing difficulties or perhaps prevent robot pick up. Figure 1 presents an overview of the RPBloX system.
Subdivision methods and Blox generation
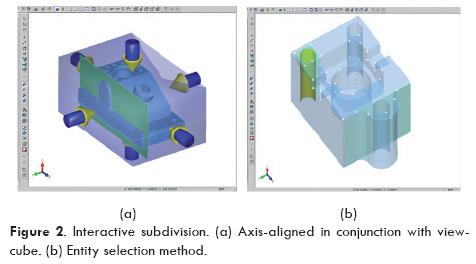
Unlike 2D slicing of an STL model, RPBloX works directly with a 3D model and allows mixed slicing in any orientation. For full interactive slicing users can select from axis-aligned means to entity (e.g. face, vertex) selection methods to generate any number of slicing planes as required (Figure 2).
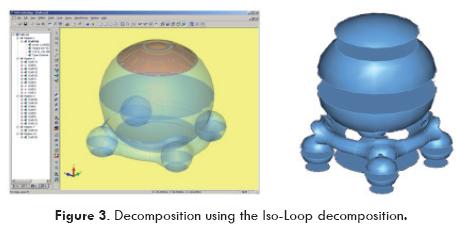
Various automatic and semi-automatic slicing algorithms have also been incorporated. Loops and isolines as segmentation tools for prismatic and complex curved surface components are extremely powerful. The Iso-Loop decomposition algorithm identifi es holes and bosses on a face. When a boss is found, a slicing plane with the same surface type as the face on which the loop lies, is used to separate the boss at its base. The use of isolines is twofold; the main use is in the segmentation of curved faces. Since isolines lie on the surface they can also be used to detect inflexion curvatures on complex surfaces. Using the isoline as a guide a slicing plane is generated and the component segmented. Figure 3 shows the results of decomposition using the iso-loop method. The example component has several similarities to medical implants such as hip replacements units.
A pattern can then be applied to the component for further decomposition. Patterns are repeating shapes and in this case the profile of a cross-shaped bar stock is used (Figure 4a). The end result is a Blox set and the prototype that can be assembled like stacking bricks.
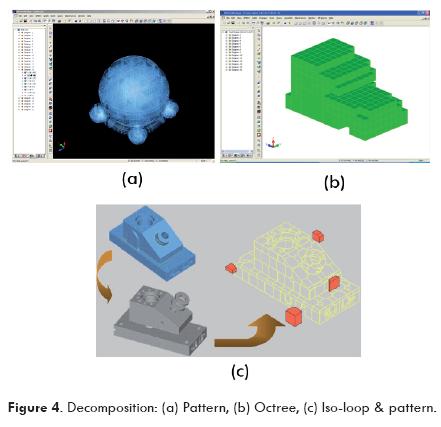
RPBloX also supports Octree decomposition which is a hierarchical form of tessellation. A number of well known Octree algorithms for subdivision, neighbour finding and tree traversal have been implemented (Figure 4b) Medellin, Corney, Davies Lim and Ritchie (2006). Combined methods for the generation of Blox are also available in the RPBloX system. Figure 4c presents a decomposition of a 3D model using a combination of iso-loop and pattern methods.
Design for manufacturing and assembly (DFMA)
In general, any component can be subdivided in smaller parts by an array of orthogonal planes but the shapes resulting from such a brute force approach could have geometries that are diffi cult to produce accurately on many manufacturing or rapid prototyping systems. Typically, complications arise when features have insuffi cient strength to withstand fi nishing processes or have a cross-section prone to distortion (e.g. warping) during the build process (e.g. thin sections and cusps). The DFMA module in the RPBloX system creates a decomposition designed for both Rapid Prototyping (DFRP) and assembly (DFA) Medellin, Corney, Davies Lim and Ritchie (2007). An overview of the DFMA module is shown in Figure 5.
This DFMA comprises:
1. Design for RP (DFRP) operators that modify the initial set of 3D units (3DU) or Blox on the basis of geometric tests that detect potential manufacturing difficulties.
2. An assembly feature generator (AFG) that creates unique pairs of male/female matching features between the Blox to add location during fabrication (e.g. gluing) and improve the mechanical properties of the entire component.
3. Generation of stl fi les of the Blox set for RP production.
The manufacturability for RP production of the Blox set is assessed using three discreet functions referred to as DFRP operators. These operators perform geometric tests to identify the presence of features known to cause RP problems such as thin sections, cusps, and knife-edges. Depending on the problem identifi ed, partitioning boundaries are modifi ed by selective merging of adjacent Blox. The process of refi ning the decomposition is iterative and each DFRP operator can be applied several times. Currently the RPBloX system uses three DFRP operators to evaluate and, where necessary, modify the partition boundaries of individual Blox. The DFRP operators use selective merging functions for Blox boundary refi nement. Merging is performed by the removal of internal faces that defi ne the Blox boundary. The selection of the Blox to merge is directly determined by the presence of manufacturing problems. The three DFRP operators are named as Op_thin, Op_cusp, and Op_vol. Thin-sections are detected by positioning spheres (default 1.5mm radius) on all the vertices of the Blox to test for intersections, Figure 6. When any pair of vertex spheres intersects, a thin-section is deemed to exist. The operator responds by selective merging of adjacent Blox. Cusps are found by evaluating the local geometry adjacent to an edge.
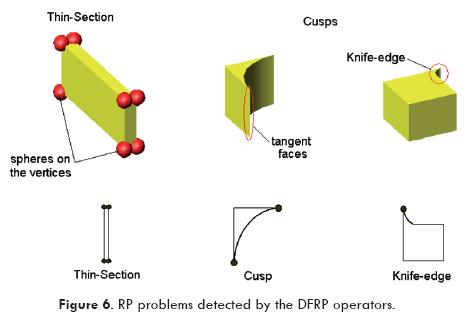
This classification examines both the type and tangent relationships between faces meeting at an edge as illustrated in Figure 6. The operator responds by selective merging of adjacent Blox. Undersized volumes, i.e. small Blox, are detected by querying the mass properties of each unit and comparing the value to a threshold defi ned according to the characteristics of the manufacturing system being used (default minimum volume 15mmx15mmx15mm). The operator responds by selective merging the 3DU.
Machining and robotic assembly code
The generation of CNC code for machining the Blox set is an ongoing work. Some of the results have shown that CNC code for machining the Blox set can be generated (Figure 7).
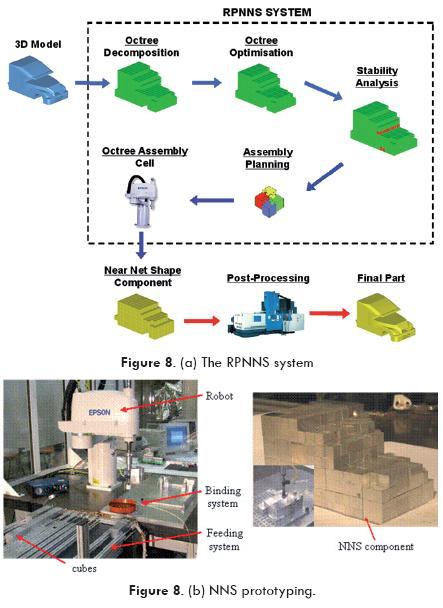
Assembly planning and automatic generation of robotic instructions have been implemented in the RPBloX system. As a result, an integrated subsystem for the production of near net shape components based on the Octree decomposition of 3D models has been developed (Figure 8a). The subsystem RPN-NS (rapid production of near net shapes) Medellin, Corney, Davies Lim and Ritchie (2008), works by subdividing a 3D model into cubes of various sizes using an Octree decomposition and optimisation method to reduce the number of cubes required without affecting the accuracy of the approximation. Once the Octree model has been verified for physical fabrication, the system generates instructions for a robot to construct the NNS model (Figure 8b).
Virtual Assembly Planning
Two experimental platforms have been developed to investigate assembly planning in virtual reality. These two platforms, named as COSTAR (Cable Organisation System Through Alternative Reality) and HAMMS (Haptic Assembly, Manufacturing and Machining System), are presented in this section.
COSTAR
The COSTAR project began in 2001 to investigate the benefits of using VR to design and route cable harnesses, Ng FM (1999). The results showed that VR gave productivity benefits over CAD during creative cable routing design activities. Follow-on work was aimed at understanding how various aspects of the immersive VR system were contributing to these benefits and how engineering design and planning processes could be analysed as they are being carried out. This was performed using comprehensive user-logging to non-intrusively collect detailed information relating to design solutions and assembly planning approaches used by a number of engineers. The COSTAR system logs all the user's interactions in the virtual environment. The contents of the log file includes the user's head and hand positions, menu options selected, design changes made together with a timestamp for each logged event. User tests have been performed to evaluate the effectiveness of the system and also to compare its performance with traditional 2D CAD systems, Ritchie, Sung, Robinson, Day, Dewar and Simmons (2007).
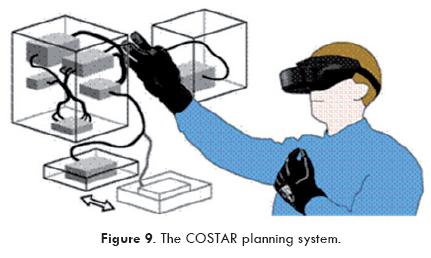
In COSTAR the user wears a Virtual Research V8 head-mounted display (HMD) and Pinch® Gloves to operate the system, Figure 9. To track the user's head and hand movements, an Ascension Flock of Birds® electromagnetic tracking system is used. The VR application was developed using SENSE8®'s WorldToolKit® release 9.
When the user carries out a design task in the virtual environment, all their actions are logged into a text file. Since each logged event has a timestamp, chronological account of what happened during the session and how long the user spent on each specific task can be done. Post-processing of the logged text file has been automated so a large amount of files can be processed to extract assembly plans.
HAMMS
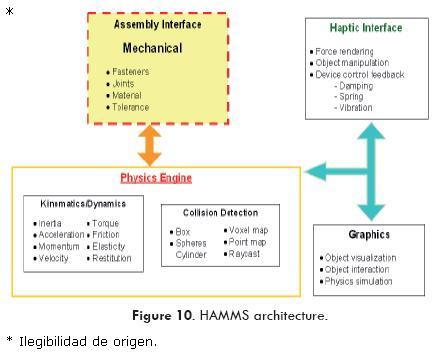
The HAMMS (Haptic Assembly, Manufacturing and Machining System) system has been developed as a test bed to investigate the user interactions and response while performing various engineering tasks using a haptic device in a virtual environment. The hardware comprises a Phantom haptic device and uses a pair of CrystalEyes® stereoscopic glasses for stereo viewing. The systems' architecture is presented in Figure 10.
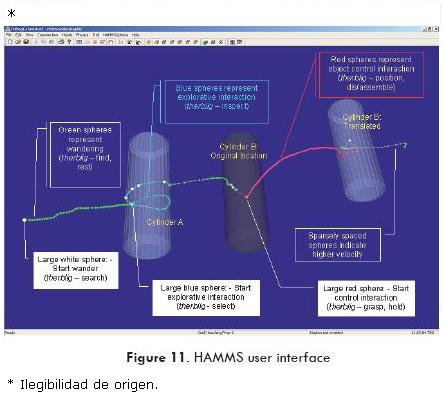
The HAMMS environment allows objects to have their physical state modifi ed and user/device/object interactions logged in real-time. The basic logged data comprises position, orientation, time stamps, velocity and an object index. Figure 11 illustrates the HAMMS GUI and the color-coded therblig units, Johnson, Ogilvie (1972), adapted by HAMMS. To visualize the data stream, large spheres are used to signify the start of an event, while smaller contiguous spheres indicate the direction, speed, and location of exploration or controlled displacements. Green indicates search, fi nd or rest. Blue represents selection and inspection. Red identifi es control events such as grasping, holding, translation, dis/assembly operations. Velocity changes are indicated by the separation of the spheres, i.e. sparsely spaced spheres equate to higher velocity. The line joining all spheres is referred as the motion-time-line (MTL). Detailed information regarding HAMMS can be found in, Ritchie, Lim, Sung, Corney, and Rea (2008).
The logged data in the HAMMS system is stored as a text file which is then used to extract and generate the assembly plan. This file contains information of the ther-blig units associated with the virtual assembly process. By using a data parser, assembly operations can be identified, filtered and extracted to generate assembly plans as shown in Figure 12.
The results of the tests carried out to evaluate the HAMM systems have clearly shown that the chronocycle data and the logged file can be used to identify individual assembly tasks and motions performed by the user during the assembly. These assembly details can be further used to automatically generate assembly plans associated to physical operations.
The Varp System
The classical context regarding assembly sequences has been to try to replace the human planner with systems which attempt to take most or all of the decision making away from the expert and replace their function with semi-automated or automated systems. In contrast VARP allows the user to interactively decompose models, perform design changes, analyse assembly processes, analyse manufacturing processes, carry out assembly tasks, evaluate cognitive design and manufacturing activities, and produce assembly and manufacturing plans via an immersive virtual and haptic interface. An overview of the proposed VARP system is presented in Figure 13.
The advantage of VARP is its unique sensory environment to explore and analyse assembly options. It will also enable walk-through so that one can see the build process, the pit falls of a portion of the design, and to make amendments before production. By collecting and analysing data in realtime, process parameters can be validated and subsequently applied or transferred to real manufacturing machines such as CNC machines, robots or RP machines. From this rich data source, cognitive evaluation of design and manufacturing processes can be used to push information to novice users and burgeoning designers.
Conclusions
This paper presents an alternative approach based on the adoption of immersive virtual reality and haptic interface for design and manufacture that can be used to produce practical downstream manufacturing information for non-layered physical prototypes. The development of a virtual reality-based assembly system can shorten the product innovation cycle and capitalise the experience of assembly operators. By analysing expert usage within the system a better understanding of the implications of virtual technologies and the cognitive association to product design can be gathered.
The elements of VARP are a short step away from full integration. RPBloX and the virtual systems COSTAR and HAMMS will form the basis of the unifi ed platform. Further developments are also earmarked in the area of Blox manufacturing planning, analysis for rapid prototyping and manufacturabi-lity and on geometric evaluations.
Finally, the unique combination of digital and physical prototyping will enable various forms of prototyping to be evaluated within the context of the product development.
Acknowledgments
We would like to acknowledge funding of this work by the UK EPSRC IMRC grant GR/R35285/01. The authors also gratefully acknowledge the support of numerous industrial partners involved in the project and the Fund for Research Support (FAI) of the UASLP and the Secretaria de Educacion Publica (SEP) of México.
REFERENCES
McLeod, J. Superfast simulators make it a lot easier to skip prototyping. Electronics, 1988, 60(1 1), 61-68. [ Links ]
Wholers, T., Rapid prototyping and manufacturing: State of the industry - Annual World Wide Progress Report, 2006, Wohlers Associates. [ Links ]
Bullinger, H.J. and Richter, M. Integrated Design and Assembly Planning. Computer Integrated Manufacturing Systems, 1991, 4(4), 239-247. [ Links ]
Bekey, G.A. Foreword (from Computer-Aided Mechanical Assembly Planning, Ed. Homem de Mello L.S., Lee S.), 1991 (Kluwer Academic Publishers, Norwell, Massachusetts), ix-xi. [ Links ]
Homem de Mello Luiz S., Lee Sukhan, "Computer-Aided Mechanical Assembly Planning", foreword by George A. Bekey, Kluwer Academic Publishers, 1991. [ Links ]
H. Medellín, J. Corney, J.M. Ritchie, T. Lim, J.B.C. Davies, A Novel Approach to the Generation of Automatic and Manual Assembly Plans Using Octrees, IEEE Proceedings of the Fourth Electronics, Robotics and Automative Mechanics Conference (CERMA 2007), September 25-28, 2007, pp.614-619. [ Links ]
Bourjault, A. Contribution a une approche méthodologique de l'assemblage automisé:Elaboration automatique des séquences opératoires. PhD Thesis, 1984 (l'Université de Franche-Compté, France). [ Links ]
Homem de Mello, L.S. and Sanderson, A.C. AND/OR Graph Representation of Assembly Plans. IEEE Transactions on Robotics and Automation, 1990, 6(2), 188-199. [ Links ]
Latombe, J-C, Wilson, R.H. and Cazals, F. Assembly Sequencing with Toleranced Parts. Computer Aided Design, 1997, 29(2), 159-174. [ Links ]
Baldwin, D.F., Abell, T.E., Lui, M.M., De Fazio, T.L. and Whitney, D.E. An Integrated Computer Aid for Generating and Evaluating Assembly Sequences for Mechanical Products. IEEE Transactions on Robotics and Automation, 1991, 7( 1), 78-94. [ Links ]
Wilson, R.H. Minimizing User Queries in Interactive Assembly Planning. IEEE Transactions on Robotics and Automation, 1995, 1 1(2), 308-312. [ Links ]
Bourell, D.L., Beaman, J.J., Marcus, H.L., and Barlow, J.W. Solid freeform fabricationL an advanced manufacturing approach. Proceedings of the SFF Symposium, 1990, pp. 1-7. [ Links ]
Ye Nong, Banerjee Prashant, Banerjee Amarnath, and Dech Fred, A Comparative Study of Assembly Planning in Traditional and Virtual Environments. In IEEE Transactions on Systems, Man, and Cybernetics—Part G Applications and Reviews, Vol. 29, No. 4, 1999. [ Links ]
Lim T., Ritchie J.M., Dewar R.G., Corney J.R., Wilkinson P., Calis M., Desmulliez M., Fang J.J., Factors affecting user performance in haptic assembly. In Virtual Reality, Vol. 1 1, No. 4, 2007, Springer. [ Links ]
Howard B.M., Vance J.M., Desktop haptic virtual assembly using physically based modeling. In Virtual Reality, Vol. 1 1, No. 4, 2007, Springer. [ Links ]
Garbaya Samir, Zaldivar-Colado U., The affect of contact force sensations on user performance in virtual assembly tasks. In Virtual Reality, Vol. 1 1, No. 4, 2007, Springer. [ Links ]
Massie T. and Salisbury K., The PHANTOM Haptic Interface: A Device for probing Virtual Objects. In ASME Winter Annual Meeting, DSC-Vol. 55-1, pp. 295-300, 1994. [ Links ]
Lanzagorta, M., Rosenberg, R., Rosenblum, L.J., and Kuo, E.Y. Rapid prototyping of virtual environments. Computing in Science & Engineering, 2(3), 2000, pp. 68-73. [ Links ]
Choi, S.H. and Samavedam, S. Visualisation of rapid prototyping. Rapid Prototyping Journal, 7(2), 2001, pp. 99-1 14. [ Links ]
Gibson, I., Brown, D., Cobb, S., and Eastgate, R. Virtual Reality and Rapid Prototyping. Proceedings of IEE workshop on Virtual Reality in Engineering, 1993, 51-63. [ Links ]
Fadel, G.M., Crane, D., Dooley, L., and Geist, R. Support structure visualisation in a Virtual Reality environment. Proceedings of the 6th Int'l Conf. On Rapid Prototyping, Dayton, 1995. [ Links ]
Morvan, S.M. and Fadel, G.M. IVCES: interactively correcting STL fi les in a virtual environment. Proceedings of the 1996 ASME Design and Engineering Technical Conference, 1996. [ Links ]
Zheng, J.M., Chan, K.W., and Gibson, I. Virtual reality — A real world review on a somewhat touchy subject. IEEE Potentials, 17(2), 1998, pp. 20-23. [ Links ]
Zorriassatine, F., Wykes, C., Parkin, R., and Gindy, N. A survey of virtual prototyping techniques for mechanical product development. Proceeding Instn. Mech. Engrs Part B: J. Engineering Manufacture, 2003, 217, pp. 51 3-530. [ Links ]
Burgoyne, D. and Murray, J.L. The Specifi cation and Development of a Computer Aided Assembly Planning System Suitable for Electro-Mechanical Products. 5th International Conference on Computer Aided Production Engineering, Edinburgh, 1989, pp. 1-4. [ Links ]
Ritchie, J.M., Dewar, R.D., Simmons, J.E.L. The Generation and Practical Use of Plans for Manual Assembly using Immersive Virtual Reality Journal of Engineering Manufacture, IMechE Part B, 1999, v21 3, pp. 461 -474. [ Links ]
T. Lim, J. Corney, J.M. Ritchie, and J.B.C. Davies,"RPBloX rapid prototyping - More than just layers", Proc. DETC'02 ASME, Montreal, Canada, 2002, DETC2002/DFM-34165. [ Links ]
T. Lim, J. Corney, J.M. Ritchie, and J.B.C. Davies, RPBloX - a novel approach towards rapid prototyping, In: Third National Conference on Rapid Prototyping, Tooling, and Manufacturing, (Eds: A E W Rennie, D M Jacobson, C E Bocking), Professional Engineering Publishing, ISBN: 1860583741. [ Links ]
Medellín H., Corney J., Davies J.B.C., Lim T., Ritchie J. M., "Algorithms for the physical rendering and assembly of octree models", Computer Aided Design, 38, 2006, pp. 69-85. [ Links ]
H. Medellín, J. Corney, T. Lim, J.B.C. Davies, J.M. Ritchie, "Automatic Subdivision and Refi nement of Large Components for Rapid Prototyping Production", Journal of Computing and Information Science in Engineering, ASME, Vol. 7, No. 3, pp. 249-258, 2007. [ Links ]
H. Medellín, J. R. Corney, J. B. C. Davies, T. Lim, and J. M. Ritchie, Octree-Based Production of Near Net Shape Components, IEEE Transactions on Automation Science and Engineering, vol. 5, no. 3, July 2008, pp. 457-466. [ Links ]
Ng FM, Virtual Reality and Computer-Based Tools for the Routing of Cable Harnesses. PhD Thesis 1999, Heriot-Watt University, Edinburgh, UK. [ Links ]
Ritchie J. M., Sung R. C. W., Robinson G., Day P. N., Dewar R. G. and Simmons J. E. L., Cable harness design, assembly and installation using immersive virtual reality, Virtual Reality Journal, 11, 2007, 261-274. [ Links ]
Robinson G., Ritchie J. M., Day P. N. and Dewar R. G.: System design and user evaluation of CoStar: an immersive stereoscopic system for cable harness design, Computer-Aided Design, 2007, 39, 245-257. [ Links ]
Johnson Stanley, Ogilvie Grant, Work Analysis, London, But-terworths, 1972, Chapter 4, pp. 56. [ Links ]
Ritchie J. M., Lim T., Sung R.S., Corney J.R., Rea H., The Analysis of Design and Manufacturing Tasks Using Haptics and Immerse VR: Some case Studies'. In Talaba Doru and Amditis Angelos (eds.): Product Engineering: Tools and Methods Based on Virtual Reality, 2008, 507-522. Springer, Netherlands. [ Links ]

