











 nova página do texto(beta)
nova página do texto(beta) Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1. Introduction
1.1. Indoor air pollution
According to the World Health Organization (2020), air pollution is the world’s largest environmental health risk, accounting yearly for about 8 million deaths (4.2 million deaths from outdoor air pollution, and 3.8 deaths from indoor air pollution). According to the same source, about 90% of the world’s population breathe polluted or contaminated air.
Most of the people spend 80% to 90% of their time indoors. Therefore, IAQ has a direct impact on overall health (Saini et al., 2020).
According to the United States (US) Environmental Protection Agency (EPA), IAQ is defined as the air quality within and around buildings and structures, especially as it relates to the health and comfort of building occupants. The sources and health effects of some common indoor pollutants such as fine Particulate Matters of diameter < 2.5 μm (PM2.5), Volatile Organic Compounds (VOCs) and other common pollutants are explained in (Tran et al., 2020).
Although CO2 is produced both naturally and through human activities, it is not classified as an air pollutant. However, it is treated as a pollutant because the amount of oxygen required for breathing becomes insufficient at high concentrations of CO2 in an indoor space. Temperature and relative humidity also contribute to the sense of thermal comfort (Jo et al., 2020).
1.2. COVID-19
As is implied in the name COVID-19, ‘CO’ stands for ‘COrona,’ ‘VI’ for ‘VIrus,’ and ‘D' for Disease, and 19 represents the year of its occurrence. The COVID-19 pandemic is considered as the most global challenge that the humankind faced since the 2nd World War (Chakraborty & Maity, 2020).
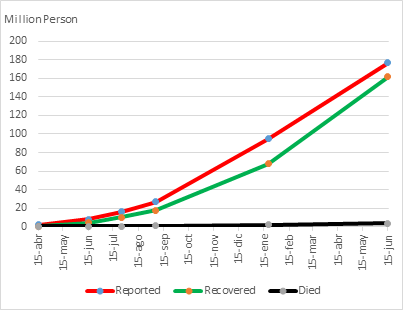
In a few short months, COVID-19 becomes global pandemic and economic disaster. As of 15 June 2021, more than 177 million people officially tested positive for the virus and about 3.84 million had died as a result (CoronaTracker, 2021).
Figure 1 shows how the rate of confirmed patients, recovered patients, and deaths is increasing exponentially.
Home isolation for both healthy and infected individuals with mild symptoms is implemented in many countries. Isolation with improper ventilation or sterilization could lead to severe health problems. The situation could be even worse if the IAQ was poor to begin with (Abouleish, 2021).
Adequate ventilation, air filtration, humidity regulation and temperature control are key strategies, which can be combined to improve indoor air quality and protect occupants from airborne viruses (Brittain et al., 2020).
1.3. Monitoring of IAQ
Monitoring of parameters such as temperature, humidity, CO2 and other air quality parameters is a major concern to businesses, educational institutions, and health organizations because it can significantly impact the health, comfort, well-being and productivity of the individuals (Yousuf et al., 2017).
Pollutants that are most commonly found in indoor air environments include VOC, CO2 and PM (Mancini et al., 2020).
With the increased concern about IAQ in recent years, IAQ analyzers combining multi-sensors are available in the market and come as separate systems, it is considered costly and not easy-to-use for continuous monitoring of IAQ (Tahsiin et al., 2020).
The emergence of cost-effective sensors and communication protocols provides improved living environments. Traditional approaches based on building automation and control systems consider buildings equipped with many different sensors. However, it is expensive, principally when it has to be implemented in existing buildings. It may require a complex integration process for sensors as well as maintenance and calibration processes (Ribino et al., 2020).
Some common indoor air pollutants and their permissible levels, as stated in WHO and European standards are summarized in Table 1 (Settimo et al., 2020).
1.4. Robotics, AIQ and COVID 19
The prime utilization of robots is to minimize person-to-person contact and to ensure cleaning, sterilization and support in indoor facilities. This will result in minimizing the life threat to personnel taking an active role in the management of the COVID-19 pandemic (Khan et al., 2020).
Robots have been developed to take on dull, dirty, and dangerous jobs. Combating infectious diseases involves an environment that is unsuitable for human workers. For disease prevention, robot-controlled noncontact surface disinfection is being used because COVID-19 spreads not only from person to person but also via contaminated surfaces. Instead of manual disinfection, autonomous or remote-controlled disinfection robots could lead to cost-effective, fast, and effective disinfection. Robots could navigate high-risk areas and continually work to sterilize all high-touch surfaces (Yang et al., 2020).
2. Materials and methods
2.1. Materials
Mobile robot arm is a mechanical manipulator that exhibits similar functions of a human arm. It consists of three revolute joints and one prismatic wheeled joint. Revolute joints allow rotational motion about Z-axis while prismatic joint allows translation motion along X and Y directions. The last linkage at the terminal of the kinematic chain is called end-effector. A gripper is employed as the end-effectors of robot manipulator. This gripper is used for holding sprinkler plastic alcohol nozzle. Basic design of the mobile robot arm was designed in Autodesk Inventor software and further kinematic analysis is done with the help of a numerical computing environment as discussed in (Gaber et al., 2016).
A simple four Degree of Freedom (DoF) mobile robot is considered for the analysis. The different DoFs are shown in Figure 2.
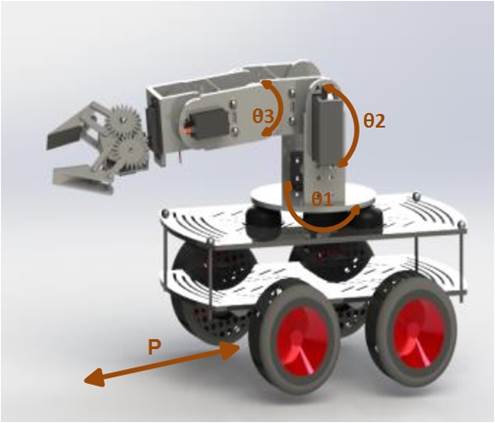
The three revolute joints are termed as θ1, θ2 and θ3 whereas P denotes the prismatic joint. The workspace of the mobile robot arm can be described by the set of points that can be reached by its sprinkler, considering a physically possible mechanical configuration (Patel, 2016). The constraints for each joint are given below in Table 2.
Table 2 Joint motion constraints.
| Joint | Type | Range |
|
|
Revolute | 0o to 90o |
|
|
Revolute | 0o to 90o |
|
|
Revolute | -30o to 60o |
| P | Prismatic | Wheeled Prismatic Joint |
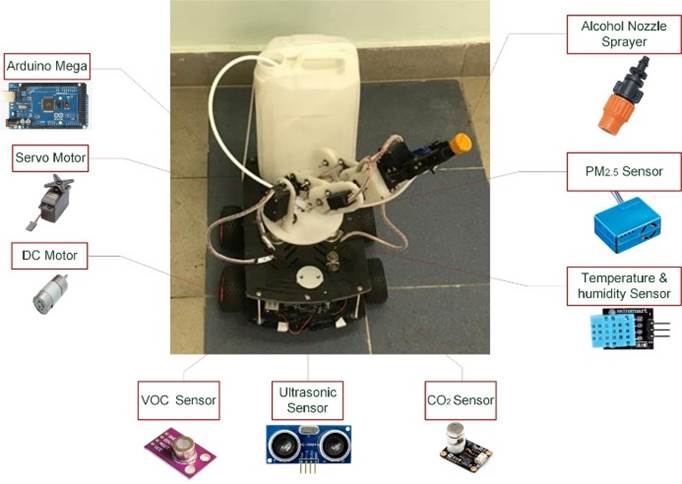
Figure 3 illustrates the fabricated mobile robot arm which includes the following:
- Three servomotors, which are used as actuators for the robot arm.
- One dc geared motor, which is used for controlling the prismatic joint.
- Air quality sensors. A group of sensors is selected suitable for communication with the controller used. These sensors are low-cost compared to an equivalent portable air quality analyzer. These sensors include:
- Temperature and humidity sensor (DHT11), which is applied to measure the dry bulb temperature (with range from 0oC to 50oC) as pulse width modulated (PWM) signal and to detect the relative humidity (with range from 20% to 95%) as PWM signal.
- CO2 sensor (MG-811), which is applied to measure the carbon dioxide with range from 0 ppm to 10000 ppm as analogue signal.
- VOC sensor (MS1100), which is applied to measure the volatile organic compounds with range from 0 mg/m3 to 20 mg/m3 as analogue signal.
- PM2.5 sensor (PM5003), which is applied to measure the particulate matter with range from 0 µg/ m3 to 999 µg/ m3 as analogue signal.
- Ultrasonic sensor (HC-SR04), which is applied to stop the robot at a distance of 60 cm from the room walls to start the sterilization process.
- The Arduino Mega card, which receives the signals from the air quality sensors and sends the appropriate signals to the servo motors using a mobile software (Zein et al., 2018). Using inverse kinematic equations described in (Crenganis et al., 2019) to get the joint variables that would put the sprinkler in the desired location.
Remotexy is mobile software for smartphones which applied to use a mobile Graphical User Interface (GUI) for Arduino Mega. The designed mobile robot needs to be capable of communicating with the mobile phone. Different communication systems can be adapted for this communication. The communication over HC06 Bluetooth module is utilized to control the three revolute servo motors and the prismatic dc motor via mobile phone.
Figure 4 shows the GUI of the mobile application applied for the control of the dc motor to make the mobile platform start at a room’s home position and for the control of the servo motors to test the manipulator’s rotational motion.

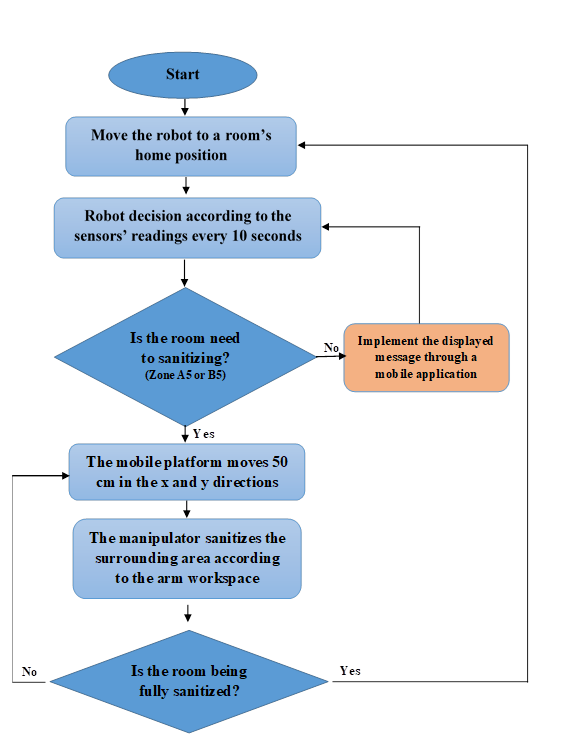
2.2. Methodology
Figure 5 illustrates the movement algorithm of the designed mobile robot. The movement of the mobile platform is based on the odometry method used to move the mobile robot in the x and y directions along a room while the movement of the translation and rotation of the manipulator is based on the inverse kinematics solution to get /
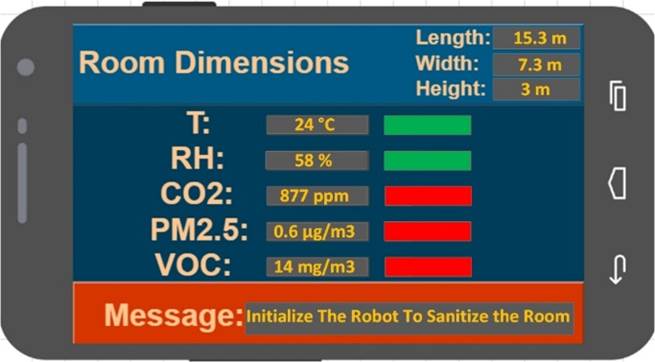
The readings (outputs) of the different sensors are divided into zones as shown in Figures 6, 7. Based on the accepted range for each parameter, the appropriate zone is determined as illustrated in Table 3. The result from the processor is fed to the mobile arm robot, which then presents the message to the user on the mobile application as shown in Figure 8, which specify the action to be taken.
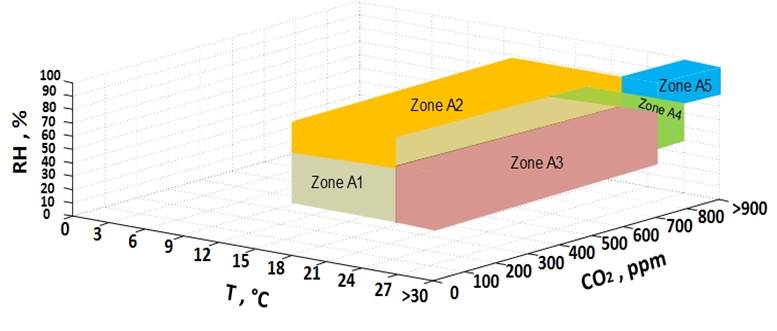
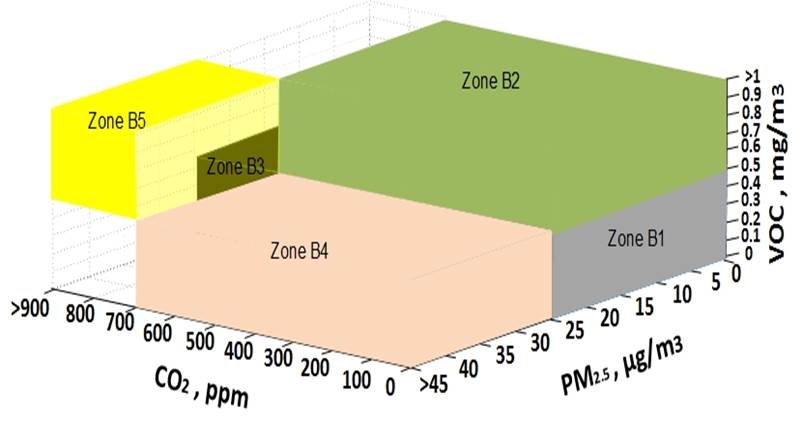
Table 3 Robot decision according to each zone.
| Accepted ranges | Zone | In / Out of range | Message |
| T: from 18oC to 27oC RH: from 40% to 80% Co2: less than 700 ppm |
A1 | T: In RH: In CO2: In |
Stable mode (normal condition) |
| A2 | T: In RH: Out CO2: In |
Air conditioner should be started | |
| A3 | T: Out RH: In CO2: In |
Open the windows of the room or open the air conditioner | |
| A4 | T: In RH: In CO2: Out |
Minimize human load and open the windows of the room | |
| A5 | T: Out RH: Out CO2: Out |
Initialize the robot to sanitize the room | |
| PM2.5: less than 25 µg/ m3 VOC: less than 0.5 mg/ m3 Co2: less than 700 ppm |
B1 | PM2.5: In VOC: In CO2: Out |
Stable mode (normal condition) |
| B2 | PM2.5: In VOC: Out CO2: In |
Room should be evacuated and open the windows | |
| B3 | PM2.5: In VOC: In CO2: Out |
Minimize human load and open the windows of the room | |
| B4 | PM2.5: Out VOC: In CO2: In |
Room should be evacuated and open the windows | |
| B5 | PM2.5: Out VOC: Out CO2: Out |
Initialize the robot to sanitize the room |
3. Results and discussions
Experimental validation is done to test the ability of the robot to measure the air quality parameters and to take appropriate action according to the classified zone. The practical experiment is repeated several times in Alexandria higher institute of Engineering and Technology (AIET) in the presence of the students and staff members. In each experiment, a message is displayed to the user on the application with the appropriate procedure to be performed on the basis of the sensors’ readings, which represent a point in a predefined zone, as shown in Figure 8.
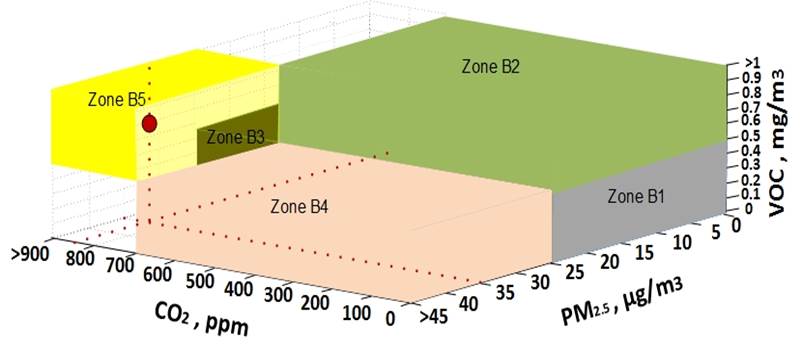
Figure 9 shows one of the practical experiments of the mobile robot arm while sanitizing one of the study halls. The dimensions of the hall are entered by the user as input and the sensors readings are presented to the user from the mobile application as output. In the shown experiment, the situation belongs to zone B5 as shown in Figure 10.

The robot has been innovated as a solution to prevent the transmission of viruses, especially in the Corona virus pandemic that the world is passing through. Since the robot automatically measures the major air quality parameters inside the room through a group of sensors that measure continuously the parameters (every 10 seconds) to make the appropriate decision that appears on the mobile application. If the action is not satisfactory to the robot logic (some reading(s) still out of range), the robot performs a new set of measurement and gives another message to the user to take the appropriate corrective action and again until all the parameters are in the accepted range.
The cost of the robot is in the range of 750 $, which enables many businesses working in indoor environments to implement it. Mainly educational institutions, praying houses (mosques and churches), public libraries, museums, theatres and cinemas, administrative buildings (governmental, banks, companies and factories) can easily implement the proposed robot.
4. Conclusions
The proposed robot work satisfactory (as designed and programmed) to continuously monitor the major indoor air parameters (temperature, relative humidity, CO2, PM2.5 and VOC) and compare the measured values with pre-set values and take the required action upon deviation. This action is sending a message to the user through a mobile application informing the user of what should be done to restore the ideal air quality conditions. When the required action is sanitization, the mobile application allows a friendly graphical user interface to help the user to start the sanitization function of the robot, thus eliminating the need of cleaning staff and minimize their exposure to possibly infected surfaces.
Future work includes the autonomous mobility of the robot without the user interference, the addition of a group of ultrasonic (or laser) sensors to avoid obstacles, adding encoder sensors to the dc motors shaft and applying the odometry kinematics theory to calculate the distance that the robot moves in the X and Y directions, use of ultraviolet rays instead of the sanitizing solution and adding a self-disinfection function to the robot.

