










Serviços Personalizados
Journal
Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkSuperficies y vacío
versão impressa ISSN 1665-3521
Superf. vacío vol.27 no.2 Ciudad de México Jun. 2014
Diseño de un dispositivo sensor de masa tipo MEMS basado en microvigas en voladizo de polisilicio
Sánchez-Fraga R.1*, Ponce-Ponce V. H.1, Ramírez-Salinas M. A.1, Estrada-Vázquez H.2, Munguía-Cervantes J.3
1 Instituto Politécnico Nacional, Centro de Investigación en Computación. México, 07738, México. * rsanchezf85@gmail.com
2 Centro Nacional de Metrología. Querétaro, 76246, México.
3 Centro de Nanociencias y Micro y Nanotecnologías. México, 07738, México.
Recibido: 30 de septiembre de 2013
Aceptado: 8 de mayo de 2014
Resumen
Se presentan tres diseños de sensores de masa MEMS basados en vigas en voladizo de polisilicio, los cuales utilizan el principio de cambio de frecuencia debido a una masa añadida mientras operan en oscilación libre. Las estructuras se accionan mediante un actuador electroestático, que consiste en un peine de capacitores interdigitados, con una orientación tal que se maximiza la amplitud de oscilación del voladizo. En consecuencia se abordan problemas de integración entre las estructuras y un circuito electrónico de acondicionamiento. Los diseños se fabricarán por micro maquinado de superficie mediante el proceso SUMMiT-V y pueden ser adecuados para aplicaciones biológicas o químicas. La viabilidad de las propuestas se sustenta mediante análisis de elemento finito (FEA) realizados mediante la herramienta de COMSOL. Se obtuvo una sensitividad de 3.43 pg/Hz, 6.71 pg/Hz y 17.31 pg/Hz para cada uno de los tres diseños.
Palabras clave: MEMS; Sensores; Microelectrónicos; Cantilever; Actuador electroestático.
Abstract
This work presents three MEMS mass sensor devices based in oscillating polysilicon cantilevers whose oscillation frequency shifts, due to corresponding changes of an added mass in the reaction container/area, can be better measured. An electrostatic actuator is used which consists of interdigitated electrodes configured to maximize the cantilever's oscillation amplitude. In consequence, integration design issues between the microelectromechanical device and the signal conditioning and acquisition circuitry are addressed. These designs are to be fabricated in the SUMMiT-V process and they can be suitable for biological or chemical applications. The feasibility of the proposed designs is supported by a mathematical model and FEA calculations performed in COMSOL and ANSYS and mass resolutions of de 3.43 pg/Hz, 6.71 pg/Hz y 17.31 pg/Hz were obtained.
Keywords: MEMS; Sensor; Microelectronics; Cantilever; Electrostatic actuator.
1 Introducción
En la actualidad existe un número considerable de aplicaciones tecnológicas para los microsensores inerciales basados en tecnología MEMS. Una de las principales estructuras utilizadas como sensor es la microviga en voladizo de silicio policristalino (polisilicio), la cual se ha estudiado y utilizado extensivamente en aplicaciones como la detección de cambio de masa. En esta clasificación se han reportado ejemplos de microvigas utilizadas como sensores de gas por resonancia donde el área de depósito se trata químicamente con un adherente que produzca una deposición selectiva de moléculas provenientes de un ambiente gaseoso [1]. Otros ejemplos incluyen biosensores, donde tal funcionalización se realiza para la deposición de biomoleculas [2]. En contraste, otro método útil para tareas de laboratorio es la deposición de un volumen conocido por micro goteo mediante equipo especializado como el GIX Microplotter II[3].
En la literatura, los sensores de masa basados en microvigas se operan en resonancia forzada. De esta forma es posible cuantificar los cambios en la frecuencia de oscilación, relacionados con el depósito de masa, mediante algún esquema de detección [4,5]. En este caso, para lograr sensibilidades mejores a 1 ng/Hz, se diseñan vigas de dimensiones reducidas que operen a frecuencias en el orden de MHz [4,5]. Sin embargo, estas frecuencias altas implican amplitudes pequeñas que están asociadas con una baja relación señal a ruido (SNR). En consecuencia se dificulta el diseño electrónico necesario para una integración en chip de un sistema sensor [6].
Por otro lado, la amplitud de movimiento vertical (normal al substrato) en las microvigas se encuentra limitada por las restricciones geométricas impuestas por el grosor de las capas de material, las cuales definen espacios de movimiento menores a 2 µm en un proceso de micro maquinado de superficie, como SUMMiT-V. Estos espacios pueden disminuir a 0.4 µm cuando se utilizan protuberancias en los extremos libres para evitar efectos de adhesión electrostática [7].
En este trabajo se presenta un concepto de diseño de sensor de masa basado en microvigas en voladizo que se fabricarán con una tecnología SUMMiT-V. Se utilizará este proceso estandarizado debido a los errores en dimensiones bien acotados que ofrece, lo que en consecuencia incrementa el número de dispositivos dentro de las especificaciones de diseño en un lote de fabricación. El diseño consiste en una microviga que opera en oscilación libre después de una deflexión inicial provocada por actuadores electrostáticos que producen un movimiento de paralelo al substrato. De esta forma se permite hacer mediciones que alarguen el tiempo de vida útil del dispositivo y las restricciones de movimiento vertical mencionadas se reducen.
Se describen tres distintas geometrías para los actuadores. En el primer diseño, referido como diseño A (Fig. 1), se define una serie de electrodos interdigitados verticalmente que producen una deflexión horizontal de la estructura.

Sin embargo, la amplitud de oscilación aún está restringida mecánicamente por la deflexión no circular que tiende a aproximarse a uno de los extremos de los capacitores.
Esto último también elimina la simetría electroestática y puede afectar tanto la estabilidad como producir una conexión de corto circuito entre los electrodos. Tales desventajas se eliminan en un segundo enfoque, referido como diseño B (Fig.2), en el que los electrodos se posicionan de forma paralela al substrato. En la Fig. 3 se muestra un corte transversal donde se aprecia la diferencia de orientación entre los diseños. El actuador electroestático se forma en las capas de POLY1-POLY0 y POLY3 del proceso SUMMiT-V, con el que se fabricarán las estructuras. Sin embargo, en el diseño B se sacrifica la fuerza de deflexión producida para un mismo voltaje y área de traslape entre placas, con respecto al diseño A, lo que dificulta una detección capacitiva.


Debido a la presencia de capacitancias parásitas con magnitudes similares al capacitor sensor, este tipo de detección usualmente complica las especificaciones del diseño electrónico. Por lo tanto la última propuesta, referida como diseño C (Fig. 4), intercambia el número placas entre la estructura fija y la viga para obtener un plano superior móvil. Es decir, solo existirá un electrodo para el actuador, definido en POLY2, y dos electrodos en el extremo libre de la microviga definidos en POLY1-POLY0 y POLY3. Al ser POLY3 la capa superior es posible agregar una sección metalizada al extremo libre de la viga que se puede utilizar como espejo en un esquema de detección óptico.

En un trabajo futuro, estos diseños serán fabricados y colocados junto a un circuito electrónico CMOS en diferentes substratos para realizar una integración híbrida MEMS-CMOS.
2. Fundamento teórico
La estructura del sensor se analizó en dos secciones: una rígida y una elástica. Esto es posible al considerar que la deformación en el área del contenedor y los peines electroestáticos es despreciable en comparación con la deflexión del voladizo. Para el diseño A (Fig. 1), el contenedor se ve sometido a una fuerza tangencial al radio de la curvatura de cada diente. En consecuencia se produce un momento en el punto B, visualizado en Fig. 5 y Fig. 6, que se expresa como:



Donde L es la longitud del voladizo, α es el ángulo de abertura de los dientes, ri es el radio de cada una de las paredes de los dientes del actuador y n es el número de pares de dientes en traslape. Para los capacitores interdigitados en peine se puede estimar la fuerza electrostática Fe producida por cada par de dientes, mientras el equilibrio electrostático se mantiene, como [8]:

Donde ∈ es la permitividad del aire, w es el ancho del diente, V es el voltaje aplicado y g es el espacio entre dientes. Por lo tanto, el análisis de la sección elástica se reduce a una viga en voladizo con un momento en el extremo libre, de la cual existen descripciones analíticas de donde se deduce la deflexión en el voladizo como [9] [10]:

Donde I es el segundo momento de inercia, E es el módulo de Young y x es un punto arbitrario a lo largo del voladizo donde se quiere calcular la deflexión. Para el caso de la deflexión en el punto B, se tiene que x=L.
Por lo tanto, a partir de la ecuación 2 se puede estimar la frecuencia natural del sistema como sigue:

Entonces, el mínimo cambio medible en el sistema se expresa como:

Para el caso de los diseños B y C, las ecuaciones (2), (3) y (4) se pueden aplicar de manera análoga considerando un solo elemento de fuerza electrostática (n=1).
Finalmente, en un actuador de electrodos interdigitados la capacitancia variable C(x) y la corriente producida ic se puede expresar como:

Donde lc es la longitud de los dientes y d es la distancia de traslape entre ellos.
3 Simulación estructural
Para sustentar la viabilidad de los diseños, las estructuras fueron simuladas mediante la herramienta de análisis de elemento finito COMSOL.
En tabla 1 se muestran las especificaciones geométricas del diseño analizado de acuerdo a la Fig. 5 y la Fig. 6.
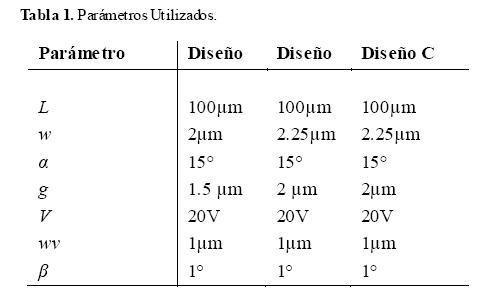
En el caso del diseño con actuadores verticales (diseño A), la separación g no es constante conforme la deformación no circular se lleva a cabo. La ecuación 1 sirve en este caso para calcular la fuerza de actuación inicial y la deformación total se calcula numéricamente mediante un análisis acoplado de mecánica y electrostática en COMSOL.
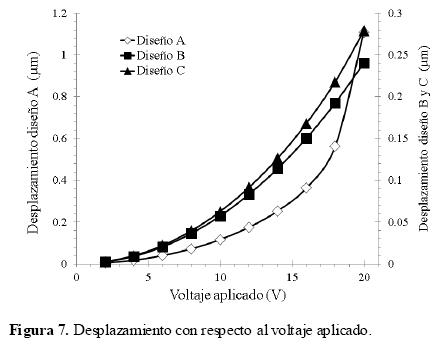
Se obtuvieron desplazamientos de 1.11µm, 0.24µm y 0.28 µm en el punto B, como se muestra en la Fig. 7 con unas frecuencias de oscilación libre de 11.461kHz, 8.465kHz, y 5.903kHz para los diseños A, B y C respectivamente.
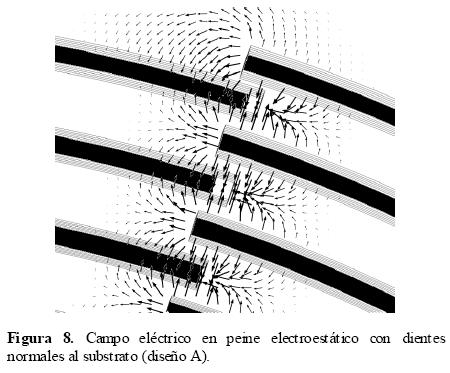
La deformación de las estructuras es producto de una atracción electroestática producida por un campo eléctrico entre los electrodos de actuación como se visualiza en la Fig. 8 y Fig. 9. La fuerza electroestática calculada por cada par de dientes es de 4.8nN, 4.1nN y 4.1nN, en relación con los tres diseños como se estima de la ecuación 1.

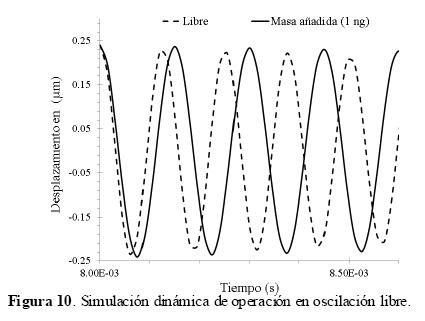
Un estudio dinámico realizado se muestra en la Fig. 10 donde se aprecia la frecuencia de oscilación libre y la atenuación correspondiente. En este análisis no se considera ningún factor de amortiguamiento.
Se realizaron simulaciones del cambio de frecuencia para estimar la resolución ideal de la estructura, en su uso como sensor de masa, la cual se presenta en la Fig. 11. En la tabla 2 se muestra un resumen de resultados obtenidos.

4 Detección capacitiva
Las estructuras presentadas poseen un electrodo simétrico al actuador que se puede utilizar en una detección capacitiva. El tamaño de los capacitores utilizados en dispositivos MEMS se encuentran en el rango de fracciones de pF y la variación de la capacitancia nominal de interés está en el orden de fF o menos. Un actuador de peine de capacitores interdigitados es equivalente a un solo capacitor de valor nominal a la suma de las capacitancias entre cada electrodo.
En la Fig. 12 se muestran los resultados del cambio de capacitancia debido a la deflexión de la viga. Se obtuvo 0.75fF/µm, 0.35fF/µm y 0.34fF/µm para los diseños A, B y C respectivamente. Para una futura integración, se propone el circuito convertidor de corriente a voltaje mostrado en la Fig. 13, equivalente al reportado en [10].

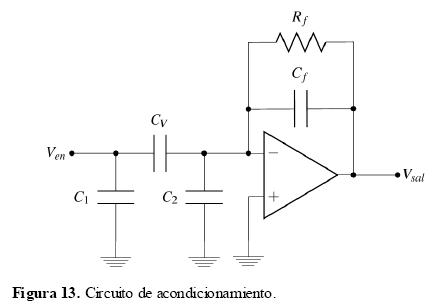
Se representa con Cv a la capacitancia variable del sensor mientras que C1 y C2 sirven para modelar las capacitancias parásitas. Estas capacitancias se pueden despreciar debido al efecto de tierra virtual en la entrada del amplificador y siempre y cuando la señal de entrada presente una resistencia interna baja. Por lo tanto se puede esperar una mejor linealidad y un mejor desempeño a la distorsión. Además, para prevenir corrientes de fuga en el capacitor de retroalimentación Cf se agrega el resistor Rf. Por lo tanto, la señal de salida se puede aproximar como sigue:

Para implementar este tipo de detección se diseñará un amplificador de alto desempeño compensado en voltaje de desvío con parámetros integrables en un microcircuito CMOS. Sin embargo, dada la configuración de las estructuras A, B y C se espera una reducción en el esfuerzo requerido para el diseño del circuito interfaz.
5 Conclusiones
Se presentan tres conceptos de sensores MEMS de masa basados en vigas de polisilicio en voladizo que, además, se pueden utilizar como sensores inerciales. Se predice, mediante un análisis de elemento finito, una resolución de 3.43 pg/Hz, 6.71 pg/Hz y 17.31 pg/Hz para los diseños A, B y C respectivamente. Su geometría estructural está diseñada para facilitar la integración electromecánica y los diseños son complementarios de acuerdo a sus ventajas y desventajas. Estas propuestas serán fabricadas en el proceso de SUMMiT-V y serán integradas con un circuito CMOS para obtener un dispositivo sensor híbrido que será posteriormente caracterizado y optimizado.
Agradecimientos
Los autores agradecen a la Secretaría de Investigación y Posgrado (SIP) del Instituto Politécnico Nacional por el soporte y recursos que brindó a través del proyecto SIP 20131505 y al CONACyT por la beca de estudios de posgrado otorgada.
Referencias
[1]. M. Reyes Barranca, S. Mendoza-Acevedo,L. Flores-Nava, A. Ávila-García, E. Vázquez-Acosta,J. Moreno-Cadenas, G. Casados-Cruz.Sensors 10, 10413 (2010). [ Links ]
[2]. S. Rabbani, P. Brishbhan, Electrical and Computer Engineering (CCECE), 24th Canadian Conference (2011). [ Links ]
[3]. J. Puigcorbé, A. Vilà, J. Cerdà, A. Cirera, I. Gràcia, C. Cané, J.R. Morante, Sensors and Actuators A: Physical 97, 379(2002). [ Links ]
[4]. M. Narducci, E. Figueras, I. Gracia, L. Fonseca, J. Santander, and C. Cané. DTIP of MEMS and MOEMS (2007). [ Links ]
[5]. M. Villarroya, J. Verd, J. Teva, G. Abadal, E. Forsen, F. Pérez, A. Uranga, E. Figueras, J. Montserrat, J. Esteve, A. Boisen, N Barniol. Sensors and Actuators A: Physical 132, 154 (2006). [ Links ]
[6]. J. Juillard, A. Bonnoit, E. Avignon, S. Hentz, E. Colinet. Journal of Applied Physics 107, 014907 (2010). [ Links ]
[7]. Design Manual, Sandia Corporation, Lockheed Martin Company. SUMMiT V Design Manual. Technical report, 2008. [ Links ]
[8]. C. Kim, A. P. Pisano, R. S. Muller, M. G. Lim. Solid-State Sensor and Actuator Workshop(1990). [ Links ]
[9]. D. Sarid, "Scanning Force Microscopy. With Applications to Electric, Magnetic and Atomic Forces" (Oxford University Press, 1994). [ Links ]
[10]. S. Baglio, S. Castorina, G. Ganci, N. Savalli. IMTC 04, Proceedings of the 21st IEEE 2, 1542 (2004). [ Links ]
[11]. W.C. Tang, T.H. Nguyen, R.T. Howe, Computer Sciences, and Berkeley Sensor. Electro Mechanical Systems, IEEE (1989). [ Links ]
[12]. W.C. Tang, M.G. Lim, R.T. Howe. Journal of Microelectromechanical Systems 1, 170(1992). [ Links ]

