










Serviços Personalizados
Journal

Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
 Citado por SciELO
Citado por SciELO Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkRevista mexicana de ingeniería química
versão impressa ISSN 1665-2738
Rev. Mex. Ing. Quím vol.9 no.1 Ciudad de México Abr. 2010
Control
Control basado en un esquema observador para sistemas de primer orden con retardo
Control based in an observer scheme for first-order systems with delay
J.F. Márquez-Rubio1*, B. del-Muro-Cuéllar1, M. Velasco-Villa2 y J. Álvarez-Ramírez3
1 Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad Culhuacán, Instituto Politécnico Nacional, México D.F., 04430, México. *Autor para la correspondencia-Email: jfcomr23@yahoo.com.mx.
2 CINVESTAV-IPN, Departamento de Ingeniería Eléctrica, Sección de Mecatrónica, México D.F., A.P. 14-740, 07000, México.
3 Universidad Autónoma Metropolitana- Iztapalapa, División de Ciencias Básicas e Ingeniería, México D.F., 09340, México.
Recibido 25 de Noviembre 2009;
Aceptado 26 de Marzo 2010
Resumen
Este trabajo considera el problema de estabilización y control de sistemas lineales con retardo en el lazo directo. Como es bien sabido, el análisis de estabilidad de este tipo de sistemas se dificulta debido al termino de retardo considerado. Para resolver el problema de estabilización, como primer paso se presentan las condiciones que aseguran la estabilidad del sistema en lazo cerrado con una retroalimentación estática de salida. Las condiciones de estabilidad se utilizan para diseñar un esquema observador (predictor) que proporciona una convergencia adecuada de la señal de predicción. El esquema propuesto presenta una configuración similar al tradicional Predictor de Smith sin los requerimientos de estabilidad de la planta que impone este último enfoque. El esquema observador se complementa con el uso de un compensador tipo PI para asegurar el seguimiento de referencias tipo escalan y el rechazo del mismo tipo de perturbaciones.
Palabras clave: retardo de tiempo, estabilización, predictor de Smith.
Abstract
This work considers the problem of stabilization and control of first order linear systems with time delay at direct path. As it is well known, the stability analysis of this kind of systems becomes difficult due to the term dead time considered. To solve the stabilization problem as a first step, the conditions that assure the stability of the systems in closed-loop with a proportional feedback are presented. These conditions are used in order to design an observer (predicting) scheme that provides adequate convergent error. The proposed scheme results similar to the traditional Smith Predictor without stability demands in the process that such approach require. The observer scheme is complemented by the use of a PI compensator to follow step references signals and disturbances rejecting of the same sort.
Keywords: time delay, stabilization, Smith Predictor, observer, root locus diagram.
1. Introducción
Los tiempos de retardo aparecen comúnmente en el modelado de diferentes clases de procesos. En particular, los procesos inestables con retardo de tiempo son frecuentemente encontrados en los procesos químicos e industriales, tales como, tanques de almacenamiento de líquido (Liu y col., 2005a), reactores continuos tipo tanque agitado (CSTR) (Liu y col., 2005b), reactores químicos discontinuos (Liu y col., 2005a), reactores químicos irreversibles-exotérmicos (Luyben, 1988), bioreactores no lineales (Kavdia y Chidambaram, 1996), proceso de polimerización continuo en emulsión (Semino, 1994), etc.
Los retardos de tiempo deben su origen a diversas circunstancias, tales como transporte de material, los efectos de los lazos de reciclo e incluso en la aproximación de sistemas de alto orden a sistemas de bajo orden (Skogestad, 2003; Kolmanovskii y Myshkis, 1992). Desde la perspectiva de control, los retardos son un caso desafiante que debe ser superado diseñando estrategias de control que proporcionen un comportamiento aceptable del sistema en lazo cerrado y por supuesto estable. Se han desarrollado diversas estrategias de control para tratar a los retardos. El enfoque más simple consiste en ignorar el término de retardo, diseñar un controlador para el proceso libre del retardo y aplicar el control diseñado al proceso retardado. Es claro que este método solo funciona en el caso de procesos que cuentan con un retardo suficientemente pequeño. Por otro lado, para retardos de magnitud no despreciable, cuando la ley de control es aplicada a través de una computadora digital, la discretización del proceso con retardo a la entrada o salida (para un retardo τ) produce una función de transferencia racional en la variable compleja z , libre de retardo (Astrom y Wittenmark, 1997). En este caso el periodo de muestreo T , debe satisfacer la relación T = τ/n, para cualquier n entero.
Cuando se considera el caso de control en tiempo continuo, el operador de retardo e−τs puede ser aproximado a través de una expansión en series de Taylor o mediante la aproximación de Padé. De esta manera, el sistema puede ser visto como un sistema de fase no mínima con una función de transferencia racional en la variable compleja s (Marshall, 1979; Hu y Wang, 2002). Una segunda clase de estrategias consiste en contrarrestar los efectos del retardo de tiempo a través de estrategias que intentan predecir los efectos de la entrada actual para una salida futura. La estrategia de predicción más usada es el Predictor de Smith (PS) (Smith, 1957; Palmor, 1996), el cual proporciona una estimación de la salida futura (señal antes de ser retardada) a través de un esquema tipo observador (ver Fig. 1). La principal limitación del PS original se debe a que el esquema de predicción no cuenta con una etapa de estabilización, lo cual restringe su aplicación a sistemas estables en lazo abierto. Para resolver este problema se han reportado diversos trabajos que abordan el caso de procesos con un integrador y un retardo de tiempo largo (Liu y col., 2005a; Astrom y col., 1994; Matausek y Micic, 1996; Normey y Camacho, 2001; Ingimundarson y Hagglund, 2002). Con la misma intención, se han reportado varios trabajos basados en modificaciones al PS, que abordan el caso de sistemas inestables (Liu y col., 2005b; Xiang, 2005; Torrico y Normey, 2005; Seshagiri y Chidambaram, 2005; Normey y Camacho, 2008, 2009).

Este trabajo se enfoca al problema de regulación de sistemas lineales con retardo a la entrada de primer orden inestables mediante un esquema observador (predictor) en tiempo continuo. La motivación de tratar con esta clase de sistemas se debe a que si bien este es un primer paso antes de abordar sistemas de orden superior, adicionalmente, en algunos casos, los sistemas de alto orden se pueden aproximar por sistemas de primer orden en cascada con un elemento de retardo (Skogestad, 2003). Esta es la principal razón por la cual algunos trabajos en la literatura se enfocan al diseño de estrategias de control para tales sistemas de bajo orden. Por ejemplo, Seshagiri y col. (2007), presentan una eficiente modificación del PS para controlar sistemas inestables de primer orden con retardo de tiempo. Dicha metodología está restringida para retardos menores que 1.5 veces la constante de tiempo inestable. Con una perspectiva diferente, Normey y Camacho, (2008), proponen una modificación al PS original para tratar sistemas de primer orden inestable con retardo. Usando una estructura similar, en Normey y Camacho (2009), el resultado se extiende a sistemas de alto orden con retardo . En ambos trabajos se aplica un análisis de robustez y se concluye que para sistemas inestables con retardo, el sistema en lazo cerrado puede ser inestabilizado con un valor infinitesimal de error en el modelo, i.e., la robustez es dependiente de la relación τ/τun, donde τ es el retardo de tiempo y τun es la constante de tiempo inestable. Adicionalmente, para los esquemas de control propuestos en Normey y Camacho (2008, 2009), puede probarse fácilmente que para el caso de procesos inestables no se garantiza la estabilidad interna del sistema, pues una pequeña condición inicial diferente de cero en el proceso inestabilizan al sistema en lazo cerrado.
En este trabajo se considera una nueva y simple metodología que permite mostrar claramente las propiedades de estabilidad del sistema en lazo cerrado en tiempo continuo, a partir de propiedades de su representación en tiempo discreto. La equivalencia entre las dos representaciones se obtiene al considerar un periodo de muestreo T tal que T → 0.
La estrategia de control propone el diseño de un esquema observador para obtener la estimación de la señal localizada entre el proceso libre de retardo y el término de retardo. Esta estrategia permite mostrar de manera simple la estabilidad interna del sistema y la convergencia de la predicción. Una vez mostrada la efectividad de la estrategia de predicción, se propone el uso de un controlador PI en una configuración de dos grados de libertad con el fin de resolver el problema de regulación y al mismo tiempo permitir el rechazo de perturbaciones tipo escalón.
El trabajo está organizado de la siguiente manera; en la Sección 2 se presenta la clase de sistemas considerados en este trabajo y una breve introducción al tradicional PS. En la Sección 3 se presenta el estimador propuesto y se analiza la convergencia del error. Posteriormente, la Sección 4 se dedica al diseño del controlador PI propuesto y se muestra el rechazo de perturbaciones tipo escalón para el sistema en lazo cerrado. En la Sección 5 se muestra el desempeño de la estrategia de control, mediante algunas simulaciones digitales y finalmente se dan algunas conclusiones en la Sección 5.
2. Clase de sistemas
Considere la clase de sistemas lineales una entrada una-salida (UEUS) con retardo de tiempo a la entrada,

donde U(s) y Y (s) son las señales de entrada y salida respectivamente, τ ≥ 0 es el retardo de tiempo que se supone conocido. N(s) y D(s) son polinomios en la variable compleja s y G(s) es la función de transferencia libre de retardo.
Note que en relación con la clase de sistemas de la Ec. (1), una estrategia de control tradicional basada en una retroalimentación de salida de la forma,

produce un sistema en lazo cerrado,

donde el término e—τs localizado en el denominador de la función de transferencia en la Ec. (3), dificulta el análisis de estabilidad (Hale y Verduyn, 1993) debido al número infinito de polos del sistema en lazo cerrado.
La función de transferencia en lazo cerrado de la estructura del clásico PS mostrada en la Fig. 1, esta dada por,

Entonces, el PS proporciona internamente una estimación futura de la señal y(t), la cual es utilizada para una retroalimentación determinada. Desafortunadamente, el esquema clásico del PS está restringido para el caso de plantas estables (Smith, 1957; Palmor, 1996). Cabe mencionar que si se intenta aplicar el PS a un sistema inestable, este esquema de compensación no es capaz de estabilizar el sistema en lazo cerrado ya que los polos inestables de la planta original pertenecen a la ecuación característica del sistema en lazo cerrado (Palmor, 1996).
Para tratar el caso de sistemas inestables, algunos autores han propuesto modificaciones al PS original y presentan soluciones adecuadas para casos particulares (Liu y col., 2005b; Astrom y col., 1994; Matausek y Micic, 1996; Xiang y col., 2005; Torrico y Normey, 2005; Seshagiri y Chidambaram, 2005; Normey y Camacho, 2008; Seshagiri y col., 2007; Majhi y Atherton, 1998). En la siguiente Sección, se propone reemplazar el compensador tradicional de Smith mediante un esquema observador que en el caso inestable permite estabilizar al sistema en lazo cerrado. El esquema propuesto se diseña con base en la teoría de observadores tradicionales. De esta manera, para obtener una estimación adecuada de la señal de salida retardada, es suficiente el modelo de la planta y una ganancia estática. Obsérvese que el esquema de predicción propuesto posee una estructura más simple que algunos de los esquemas presentados recientemente en la literatura, ver por ejemplo Seshagiri y Chidambaram (2005); Normey y Camacho (2008, 2009); Seshagiri y col. (2007).
En este trabajo se considera la noción clásica de estabilidad relacionada con la función de transferencia i.e., la estabilidad del sistema depende de la posición de los polos en el semiplano izquierdo del plano complejo para el caso continuo y dentro del círculo unitario en el caso discreto.
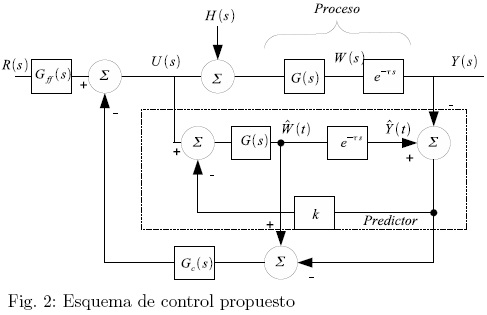
3. Estrategia de estimación
La estrategia de predicción propuesta en este trabajo se muestra en la Fig. 2, donde como en el caso del PS se describe un módulo de estimación así como un controlador diseñado a partir del proceso libre de retardo. A continuación se presentan condiciones necesarias y suficientes para la existencia de un estimador de la señal w(t) (ver Fig. 2). Además, se propone una simple metodología para obtener explícitamente dicho estimador cuando sea posible.
Considérese un sistema inestable con retardo en el lazo directo,

donde a > 0. Note que τun = a -1, puede verse como la constante de tiempo inestable del proceso.
El siguiente resultado describe las condiciones que aseguran la estabilidad en lazo cerrado para el sistema con retroalimentación estática de la variable de salida.
Lema 1 Considere el sistema retardado dado por la Ec. (5) y una retroalimentación proporcional de la salida,

donde R(s) es la nueva entrada de referencia. Entonces, existe k tal que el sistema en lazo cerrado, ecs. (5)-(6),

es BIBO estable (bounded-input bounded-output) si y solo si  .
.
Demostración. Considere la discretización del proceso continuo dado por la Ec. (5) utilizando un retenedor de orden cero y un periodo de muestreo T =  con n ∈
con n ∈  . De esta forma se obtiene,
. De esta forma se obtiene,

El sistema de la Ec. (8) en lazo cerrado con una retroalimentación estática de salida de la forma de la Ec. (6) produce la ecuación característica,

El problema se reduce a mostrar que todas las raíces de la Ec. (9) están dentro del circulo unitario si y solo si , cuando T → 0, equivalentemente cuando se considera  . Considere ahora el diagrama del lugar geométrico de las raíces de la Ec. (9) (Evans, 1954). El sistema en lazo cerrado tiene n polos en el origen y uno en z = eaT, dado que no existen polos finitos, tenemos n +1 trayectorias hacia el infinito, n - 1 empiezan en el origen y las dos trayectorias restantes empiezan en un punto localizado entre el origen y z = eaT. Este punto puede ser localizado fácilmente considerando,
. Considere ahora el diagrama del lugar geométrico de las raíces de la Ec. (9) (Evans, 1954). El sistema en lazo cerrado tiene n polos en el origen y uno en z = eaT, dado que no existen polos finitos, tenemos n +1 trayectorias hacia el infinito, n - 1 empiezan en el origen y las dos trayectorias restantes empiezan en un punto localizado entre el origen y z = eaT. Este punto puede ser localizado fácilmente considerando,

Esto produce,

que tiene n − 1 raíces en el origen y una en  Si el punto de ruptura sobre el eje real se encuentra dentro del circulo unitario, entonces el sistema en lazo cerrado tiene una región de estabilidad, de lo contrario el sistema es inestable para cualquier k.
Si el punto de ruptura sobre el eje real se encuentra dentro del circulo unitario, entonces el sistema en lazo cerrado tiene una región de estabilidad, de lo contrario el sistema es inestable para cualquier k.
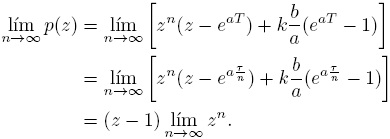
Las propiedades de estabilidad del sistema equivalente continuo de las ecs. (5)-(6) son obtenidas considerando el límite cuando n → ∞, o equivalente, cuando T → 0, esto es,

Debido a que este punto está localizado en el límite de la estabilidad, es fácil ver que si aτ < 1 (i.e., τ < τun), el límite tiende a uno por la izquierda. Entonces, existe k que estabiliza al sistema en lazo cerrado. En el caso aτ ≥ 1, no es posible estabilizar al sistema a través de una retroalimentación estática de salida (i.e., el límite tiende a uno por la derecha y un par de polos están fuera del círculo unitario).
Para los n − 1 polos restantes, de la ecuación característica dada por la Ec. (9), tomando en cuenta el caso continuo equivalente n → ∞, se obtiene,
Por lo tanto, en este caso se confirma que un polo esta localizado en z = 1 y el resto de los polos están en el origen. De lo anterior, es claro que cuando un polo esta localizado en una vecindad del punto z =1, todos los demás polos están en una vecindad del origen. Entonces, se muestra finalmente que el sistema puede ser estabilizado si y solo si aτ < 1.
Observación 1 En la prueba del lema anterior se hace uso del hecho que, el modelo en tiempo discreto de un sistema en tiempo continuo, coincide con el sistema continuo cuando el tiempo de muestreo T → 0, considerando un periodo de muestreo y un dispositivo de retención.
Observación 2 Note que la estabilidad del sistema de la forma de la Ec. (7), se ha estudiado en la literatura (Kolmanovskii y Myshkis, 1992; Hale y Verduyn, 1993; Niculescu, 2001; Silva y Bhattacharyya, 2005; Shafiei Z., Shenton A.T., 1994) y la prueba del Lema 1 puede obtenerse también considerando diferentes enfoques como el de respuesta en frecuencia, la D-descomposición, o por el clásico Método de Pontryagin. Sin embargo, en este trabajo se ha presentado un enfoque novedoso para la obtención de dicho resultado, el cual es la base del esquema observador propuesto más adelante.
Una vez garantizada la existencia de la ganancia k, a continuación se presenta un resultado que nos permite calcular de una manera práctica y sencilla un valor de k, que estabilice al sistema dado por la Ec. (7).
Lema 2 Considere el sistema dado por la Ec. (5) con . Entonces existe k ∈ R+ dado en laEc. (6) que estabiliza el sistema en lazo cerrado de las ecs. (5)-(6). Más aún, k satisface los límites α < k < β, con α =  y para alguna constante β > .
y para alguna constante β > .
Demostración. Suponga que y como en el Lema 1 considere la discretización del sistema de la Ec. (5) con T =, n ∈ dada por la Ec. (8).
En el diagrama del lugar geométrico de las raíces asociado con el sistema discreto, es posible ver que en la configuración en lazo abierto el sistema tiene n polos en el origen y uno en z = eaT sin ceros finitos. Por esta razón, habrá n − 1 trayectorias hacia el infinito y un par convergen a un punto sobre el eje real localizado entre el origen y z = 1.
Note que si k = 0, el sistema es inestable. La ganancia k que toma el acotamiento de la región de estabilidad (z = 1), se obtiene evaluando k con z = 1, esto es,

Entonces con k = a/b el sistema es marginal-mente estable. Para concluir la prueba, note que el caso continuo se obtiene considerando nuevamente n → ∞, (i.e., T → 0) y por lo tanto, como existe una región de estabilidad, i.e., el sistema es estable para α < k < β, con α = a/b y para alguna constante β > a/b.
Observación 3 A partir de un análisis en el dominio de la frecuencia, no es muy difícil determinar con precisión el valor de β dado en el Lema anterior. De hecho, tal valor esta dado por  , donde ω es tal que satisface la relación
, donde ω es tal que satisface la relación  = tan(ωτ) para 0 < ω <
= tan(ωτ) para 0 < ω <  . La utilidad del Lema 2 estriba en que cualquier k = + ε, con un ε > 0 estabiliza el sistema en lazo cerrado de las ecs. (5)-(6) para ε suficientemente pequeño.
. La utilidad del Lema 2 estriba en que cualquier k = + ε, con un ε > 0 estabiliza el sistema en lazo cerrado de las ecs. (5)-(6) para ε suficientemente pequeño.
Observación 4 Nótese que conforme τ → 0, se tiene que ω → ∞ y por lo tanto la magnitud de k también tiende infinito, lo cual coincide con las propiedades de estabilidad de un sistema de la forma de las ecs. (5)-(6) libre de retardo, i.e., con τ =0.
Podemos ahora presentar el resultado principal de este trabajo; las condiciones para la existencia de un esquema predictor como el descrito en la Fig. 2 para la clase de sistemas inestables con retardo dados en la Ec. (5).
Teorema 1 Considere el esquema observador dado en la Fig. 2. Existe una ganancia k ∈ R tal que  si y solo si .
si y solo si .
Demostración. Considere el esquema observador dado en la Fig. 2, la dinámica completa de dicho esquema puede escribirse como,

Definiendo el error de predicción como ex (t) =  (t)- x (t) es fácil obtener,
(t)- x (t) es fácil obtener,

Por lo tanto, a partir del Lema 1, se demuestra el resultado.
4. Regulación y rechazo de perturbaciones
Una vez establecido el esquema de predicción, la estructura de control se complementa con el uso de una acción Proporcional-Integral. Obsérvese que la estrategia de control puede ser implementada independientemente de la estrategia de estimación y por lo tanto, el uso control PI no es forzoso.
Por otro lado, más adelante se muestra que la estrategia de control propuesta permite rechazar perturbaciones de tipo escalón.
4.1. Acción Proporcional-Integral
Los métodos tradicionales de sintonización de los controladores PI/PID inducen un cero en el sistema en lazo cerrado que produce un sobreimpulso. Por esta razón, para mejorar las propiedades de seguimiento, una respuesta de sobreimpulso adecuada y reducción de tiempo de establecimiento, en la literatura se propone un esquema de control con dos grados de libertad (Astrom y Hagglund, 1995), también conocido como "PI-setpoint weighting". Siguiendo este enfoque, el controlador PI propuesto está dado por,

con una modificación en el error proporcional dada por, ep(t) = σr(t) − y(t) y un error integral de la forma, e(t)= r(t) − y(t). Bajo estas condiciones, la retroalimentación expresada por ls Ec. (11) puede ser escrita en una estructura con dos grados de libertad, como,

donde,

Acorde con la idea de predicción de Smith, la sintonización del controlador PI está basada en el modelo del proceso libre de retardo. En este caso, se propone el diseño de dicho control a través de la reubicación de polos, la cual permite encontrar un controlador que proporciona las especificaciones deseadas en lazo cerrado. Para esto, considere la función de transferencia libre de retardo G(s) dada en la Ec. (5) en lazo cerrado con un compensador PI dado por la Ec. (11). Así, se obtiene la ecuación característica,

Considerado la caracterización general de un sistema de segundo orden en términos del parámetro de amortiguamiento ζ y la frecuencia natural ω0, la Ec. (15) toma la forma estándar, s2 +2ζω0s +  = 0, de donde es posible obtener,
= 0, de donde es posible obtener,  y
y  .
.
Note que la función de transferencia entrada salida del proceso tiene un cero en  . Para minimizar el sobreimpulso excesivo en la respuesta, Astrom y Hagglund (1995), proponen utilizar el parámetro σ tal que el cero se localice a la izquierda de los polos dominantes en lazo cerrado. Un valor razonable es
. Para minimizar el sobreimpulso excesivo en la respuesta, Astrom y Hagglund (1995), proponen utilizar el parámetro σ tal que el cero se localice a la izquierda de los polos dominantes en lazo cerrado. Un valor razonable es  el cual ubica al cero en s = −ω0. También, el tiempo integral Ti puede ser aproximado para un valor grande de ω0 como,
el cual ubica al cero en s = −ω0. También, el tiempo integral Ti puede ser aproximado para un valor grande de ω0 como,  , y así, el cero del controlador PI es independiente de las dinámicas dominantes del sistema.
, y así, el cero del controlador PI es independiente de las dinámicas dominantes del sistema.
4.2. Rechazo de perturbaciones.
Para mostrar el rechazo de perturbaciones tipo escalón de la estrategia de control propuesta se presenta el siguiente resultado.
Lema 3 Sea τ considere el esquema a de control mostrado en la Fig. 2, junto con el controlador PI descrito en la Ec. (11) anteriormente. Sea H(s) una perturbación de tipo escalón y la entrada de referencia R(s)=0. Entonces, 
Demostración. Considere nuevamente la estrategia de control de la Fig. 2. La función de transferencia Y (s)/H(s) está dada por,

Donde J(s) = ke−τs + Gc(s). Aplicando el teorema del valor final a la salida Y (s) de la Ec. (16) y considerando una perturbación H(s) = η/s (η constante), obtenemos,

Así, la estrategia de control es capaz de rechazar perturbaciones tipo escalón.
La metodología de control propuesta, que tiene como propósito estabilizar y al mismo tiempo mejorar la respuesta del sistema en lazo cerrado, se resume a continuación:
1. El cumplimiento del Teorema 1 (
2. Estabilización del predictor para asegurar estabilidad interna del sistema. Esto puede lograrse sintonizando k como se propone usando el resultado del Lema 2.
3. Diseño del controlador mediante la retroalimentación de la salida libre de retardo estimada. Una opción es utilizar la estrategia del control "PI setpoint weighting" (referida en la Fig. 2), o bien utilizar cualquier otro control deseado que estabilice el proceso libre de retardo G(s).
5. Resultados en simulación
La metodología propuesta se evalúa a través de ejemplos comparativos tomados de la literatura reciente, (Normey y Camacho, 2009; Seshagiri y col., 2007).
Ejemplo 1. Considere el control de concentración en un reactor inestable citado en Normey y Camacho (2009). El sistema en lazo abierto está dado por,

Los controladores propuestos por Normey y Camacho (2009), para este proceso son, C(s) =  F (s) =
F (s) =  y Fr(s) =
y Fr(s) =  (ver Normey y Camacho, 2009). La metodología propuesta en este trabajo sugiere estabilizar al observador con,
(ver Normey y Camacho, 2009). La metodología propuesta en este trabajo sugiere estabilizar al observador con,  De esta manera, se escoge ε =0,4087, por lo tanto k =0,7. Los parámetros del controlador PI son, K = 22,6, Ti =20 y σ =0,5.
De esta manera, se escoge ε =0,4087, por lo tanto k =0,7. Los parámetros del controlador PI son, K = 22,6, Ti =20 y σ =0,5.
Con estos controladores, se compara el comportamiento de los dos esquemas de control, considerando una entrada escalón unitario y una perturbación H(s) de tipo escalón, actuando a los t = 300 seg.
La Fig. 3, muestra las respuestas del sistema en lazo cerrado, considerando el conocimiento perfecto del proceso. Note que el método propuesto proporciona una mejor respuesta al rechazo de perturbación que la estructura propuesta por Normey y Camacho (2009). Note además que el problema de estabilidad interna se ve reflejado en el estado estacionario de la respuesta de la metodología dada en Normey y Camacho (2009). En la Fig. 4, se considera una condición inicial mínima en el error de salida, i.e.,  (t) −
(t) −  (t) = 0,01, para ambas estructuras. Es evidente que el esquema de control propuesto en Normey y Camacho (2009), presenta una dinámica inestable en el error de salida mientras que la estrategia de control aquí propuesta conserva una dinámica estable aún en estas condiciones. De esta manera se verifica nuevamente el problema de estabilidad interna que presenta el esquema de control en Normey y Camacho (2009).
(t) = 0,01, para ambas estructuras. Es evidente que el esquema de control propuesto en Normey y Camacho (2009), presenta una dinámica inestable en el error de salida mientras que la estrategia de control aquí propuesta conserva una dinámica estable aún en estas condiciones. De esta manera se verifica nuevamente el problema de estabilidad interna que presenta el esquema de control en Normey y Camacho (2009).


Ejemplo 2. Considere el sistema de primer orden con retardo dado por,

Para este sistema, Seshagiri y col., (2007) proponen los siguientes controladores kc = 6,τi = 0,96 ,kd = 2,078,ε = 0,5 y τƒ =0,56 (ver Seshagiri y col., 2007). El esquema de control propuesto en el presente trabajo sugiere k =1,5. Para obtener la misma velocidad del seguimiento de referencia, tenemos los parámetros del control PI, K = 6, Ti =0,96 y σ =0,5.
En la Fig. 5 se evalúa la respuesta del sistema en lazo cerrado para las dos estrategias de control considerando el conocimiento exacto del proceso, una entrada escalón unitario y una perturbación H(s) tipo escalón de magnitud −0,5 unidades, actuando a los 15 seg. Note que el tiempo de recuperación del sistema con respecto a la perturbación es el mismo.

Cuando se pone en operación un sistema en la práctica, es bien sabido que no siempre es posible medir las condiciones iniciales del sistema para programar al modelo del sistema con las mismas condiciones iniciales del proceso. Por tal motivo, las estrategias de control diseñadas deben considerar este problema. De esta manera, la Fig. 6 muestra la comparación de las respuestas de salida para el esquema propuesto y la estructura presentada en Seshagiri y col., (2007), considerando una condición inicial en el proceso. Obsérvese que la respuesta de la estructura de Seshagiri y col., (2007) presenta sobreimpulsos, que en ciertos casos son indeseables, mientras que la estrategia propuesta muestra dichos sobreimpulsos atenuados considerablemente. De cualquier manera, ambas estrategias son estables en estado estacionario aún bajo estas condiciones. Finalmente en la Fig. 7, se muestra la respuesta de ambas estrategias considerando una variación paramétrica de +15 % en el retardo del proceso τ.


Conclusiones
Los procesos inestables con retardo de tiempo representan comúnmente un problema de control difícil de abordar. De hecho, la existencia de un retardo de tiempo suficientemente grande representa el peor escenario en el caso de regulación, debido a los problemas de inestabilidad asociados a este fenómeno. En este trabajo se presentan condiciones explícitas bajo las cuales es posible la construcción de un predictor de salida considerando una configuración observador para una clase de sistemas de primer orden con retardo en el lazo directo. La predicción de salida es complementada con el uso de un controlador PI de dos grados de libertad, el cual es capaz de reducir sobreimpulsos en la respuesta de salida y permite rechazar perturbaciones de tipo escalón. La estrategia de control es simple y fácil de sintonizar. Para evaluar el desempeño de la estrategia de control propuesta, se presentan simulaciones comparativas con estrategias de control reportadas recientemente.
Agradecimiento
Trabajo apoyado por Proyecto: 61713. CONACyT México.
Referencias
Astrom K.J., Hagglund T. (1995). PID Controllers, theory, design and tuning. International Society for Measurement and Control. Nueva York. [ Links ]
Astrom K.J., Hang C.C., Lim B.C. (1994). A new Smith predictor for controlling a process with an integrator and long dead time. IEEE Transactions on Automatic Control 39(2), 343-345. [ Links ]
Astrom K. J., Wittenmark B. (1997). Computer Controlled Systems: theory and design, (3rd Ed.), Prentice Hall. [ Links ]
Evans W.R. (1954). Control-Systems Dynamics. Mc Graw-Hill, Nueva York. [ Links ]
Hale J.K., Verduyn S.M. (1993). Introduction to Functional Differential equations. Springer-Verlag, Nueva York. [ Links ]
Hu H., Wang Z. H. (2002). Dynamics of controlled mechanical systems with delayed feedback. Springer-Verlag, Nueva York. [ Links ]
Ingimundarson A., Hagglund T. (2002). Performance comparison between pid and dead-time compensating controllers. Journal of Process Control 12, 887-895. [ Links ]
Kavdia M., Chidambaram M. (1996). On-line controller tuning for unstable systems. Computers and Chemical Engineering 20,(3), 301-305. [ Links ]
Kolmanovskii V., Myshkis A. (1992). Applied theory of functional differential equations. Kluwer Academic Publishers. Dordrecht, The Netherlands. [ Links ]
Liu T., Cai Y. Z., Gu D. Y., Zhang W.D. (2005a). New modified Smith Predictor scheme for integrating and unstable processes with time delay. IEE Proceedings-Control Theory and Applications 152(2), 238-246. [ Links ]
Liu T., Zhang W., Gu D. (2005b). Analytical design of two-degree-of-freedom control scheme for open-loop unstable processes. Journal of Process Control 15(5), 559-572. [ Links ]
Luyben W. L. (1988). External versus internal open-loop unstable processes. Industrial and Engineering Chemistry Research 37(7), 2713-2720. [ Links ]
Marshall J.E. (1979). Control of time-delay systems. Peter Peregrinus LTD, Londres. [ Links ]
Matausek M. R., Micic A.D. (1996). A modified smith predictor for controlling a process with an integrator and long dead-time. IEEE Transactions on Automatic Control 41(8), 1199-1203. [ Links ]
Majhi S., Atherton D.P. (1998). A new Smith predictor and controller for unstable and integrating processes with time delay. Proceedings of the 37th IEEE Conference on Decision and Control, 1341-1345. [ Links ]
Niculescu S.I. (2001). Delay Effects on Stability. A robust control approach. Spinger-Verlag, Londres. [ Links ]
Normey J.E., Camacho E.F. (2001). A unified approach to design dead-time compensators for stable plants and integrative processes wit dead-time. 40th. IEEE Conference On Decision and Control, 2267-2272. [ Links ]
Normey J.E., Camacho E.F. (2008). Simple Robust dead-time compensator for first-order plus dead-time unstable processes. Industrial and Engineering Chemistry Research 47, 4784-4790. [ Links ]
Normey J.E., Camacho E.F. (2009). Unified approach for robust dead-time compensator design. Journal of Process Control 19, 38-47. [ Links ]
Palmor Z.J. (1996). Time-delay compensation Smith predictor and its modifications. The Control Handbook, 224-237. [ Links ]
Semino D. (1994). Automatic tuning of PID controllers for unstable processes. Proceedings IFAC Advanced Control of Chemical Processes 321, Kioto, Japón. [ Links ]
Seshagiri R.A., Chidambaram M. (2005). Enhaced Smith Predictor for unstable processes with time delay. Industrial and Engineering Chemistry Research 44, 8291-8299. [ Links ]
Seshagiri R.A., Rao S.R., Chidambaram M. (2007). Simple analytical design of modified Smith Predictor with improved performance for unstable first-order plus time delay (FOPTD) processes. Industrial and Engineering Chemistry Research 46(13), 4561-4571. [ Links ]
Shafiei Z., Shenton A.T. (1994). Tuning of pidtype controllers for stable and unstable systems with time delay. Automatica 30(10), 1609-1615. [ Links ]
Silva G.J., Bhattacharyya S.P. (2005). PID controllers for time-delay systems. Birkhuser, Boston. [ Links ]
Skogestad S. (2003). Simple analytic rules for model reduction and PID controller tuning. Journal of Process Control 13, 291-309. [ Links ]
Smith O. J. M. (1957).Closer control of loops with dead time. Chemical Engineering Progress 53,(5), 217-219. [ Links ]
Torrico B.C., Normey J.E. (2005). 2dof discrete dead time compensator for stable and integrative processes with dead time. Journal of Process Control 15, 341-352. [ Links ]
Xiang L., Yong-Sheng Y., Quing-Guo W., Wei-Xing Z. (2005). Double two-degree-offreedom control scheme for improved control of unstable delay processes. Journal of Process Control 15(5), 605-614. [ Links ]

