











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
La creciente demanda en la producción de crudo en México ha planteado la necesidad de nuevas soluciones, una alternativa que se explora es la explotación de campos en aguas profundas del Golfo de México mediante el uso de sistemas flotantes de producción. Estos sistemas flotantes de producción deben permanecer en su localización durante toda la vida del yacimiento, por lo que deben ser capaces de soportar condiciones ambientales extremas manteniendo su integridad estructural y un buen comportamiento hidrodinámico. Dado lo anterior, en el presente trabajo se lleva a cabo un estudio sobre el efecto de seis variables de diseño de la geometría del casco en la respuesta hidrodinámica de sistemas flotantes tipo semisumergibles, localizadas en aguas nacionales del Golfo de México, considerando tres diferentes volúmenes de producción. El considerar tres volúmenes de producción impacta en el tamaño y pesos de los equipos en cubierta, impactando directamente en el peso de los módulos de cubierta, lo que también afecta de manera importante la respuesta de movimientos (i.e. arfada, balanceo y cabeceo) del sistema flotante.
Antecedentes
Existe una gran variedad de sistemas flotantes que pueden ser utilizados en la producción de crudo en aguas profundas, por ejemplo, las Plataformas de Piernas Tensionadas (Tension Leg Platform), los barcos de almacenamiento, producción y descarga también conocidos como FPSOs, las plataformas tipo Spar y las plataformas tipo semisumergibles. En este estudio se seleccionaron los sistemas flotantes tipo semisumergibles por la gran probabilidad de que sean los sistemas que se utilicen para la producción de hidrocarburos en aguas nacionales del Golfo de México, debido a que en un futuro cercano se acelere el proceso de desarrollo de los campos en aguas profundas y ultra profundas debido a los cambios realizados por las reformas para el sector hidrocarburos que se han presentado en México durante los últimos años. Además, es importante destacar que a la fecha no se cuenta con ese tipo de sistemas y, por ende, se requiere llevar a cabo estudios sobre su análisis y diseño, así como la formación de personal altamente especializado en dichas áreas. La mayor contribución de este trabajo es adecuar las metodologías existentes para aplicarlas en las condiciones ambientales que se tienen en aguas territoriales para este tipo de sistemas. Asimismo la automatización del proceso en el que se pueden generar un gran número de modelos numéricos de sistemas flotantes definiendo únicamente los rangos de las variables geométricas, y evaluando su comportamiento hidrodinámico.
Una de las principales propuestas para el cálculo de la respuesta hidrodinámica es la realizada por Morison et al. (1950), en la cual se emplea una fórmula semi-empírica para estimar la fuerza sobre una columna vertical fija. La fórmula tiene dos términos, uno de ellos toma en cuenta los efectos inerciales y el otro los efectos de arrastre viscosos.
Por otro lado, Wang (1968) estudió el comportamiento de un cilindro circular oscilante para números de Reynolds bajos a través del método de expansión y contracción de funciones, obteniendo coeficientes de arrastre y funciones de corriente de las expresiones analíticas.
Hooft (1972) aplicó consistentemente la fórmula de la ecuación de Morison para una geometría libre de la semisumergible que oscila bajo la acción de las olas, compuesta por elementos alargados, elementos tridimensionales compactos y áreas planas.
Las fuerzas del oleaje actuando en estructuras costa afuera ante condiciones de oleaje irregular están clasificadas en fuerzas oscilatorias de primer y segundo orden. Las fuerzas de primer orden son proporcionales a la altura de la ola con una frecuencia igual a la del oleaje. Por otro lado, las fuerzas de segundo orden varían lentamente oscilando a una frecuencia más baja que la frecuencia del oleaje. La componente estacionaria de la fuerza de segundo orden es proporcional al cuadrado de la altura de ola. A pesar de que las fuerzas de segundo orden son pequeñas en magnitud, estas podrían causar movimientos horizontales mayores con frecuencias bajas (Remery & Hermans, 1972).
Para el estudio de las fuerzas en oleaje regular Hogben (1976) sugiere que los problemas hidrodinámicos de cilindros podrían ser clasificados en tres regiones de acuerdo con el diámetro del cilindro, la longitud y la altura de la ola. La primera región se presenta cuando Hs/D>1, donde la ecuación de Morison es más adecuada que el método de difracción. La segunda región cuando D/λ >0.2, donde el método de difracción es más adecuado. La tercera región se presenta cuando D/λ<0.2 y Hs/D < 1, donde ambos métodos pueden ser aplicados y son igual de adecuados. Donde Hs, λ y D son la altura de la ola, longitud de la ola y el diámetro del cilindro, respectivamente.
Por otro lado, Pinkster (1979) desarrolló un método basado en la teoría de potencial 3D para calcular las fuerzas de deriva media en una estructura flotante en oleaje regular incluyendo las componentes oscilatorias de baja frecuencia, las cuales se incrementan cuando la estructura está flotando ante grupos de oleaje regular que consisten en dos olas regulares con una pequeña diferencia en sus frecuencias. Los resultados de las fuerzas de deriva de baja frecuencia en una barcaza rectangular y una semisumergible son comparados con resultados experimentales obteniendo una buena correlación.
La teoría de potencial es ampliamente usada para el análisis hidrodinámico de estructuras costa afuera. Existen diferentes métodos que pueden emplearse para aplicar el enfoque de esta teoría y determinar las fuerzas de deriva. Esos métodos fueron clasificados por Pinkster (1980). En el primero se calcula la media de las fuerzas de segundo orden basada en momentos y consideraciones de energía, en el segundo se deducen las fuerzas de segundo orden de media y baja frecuencia, además de momentos a través de la integración directa de las presiones del fluido que actúan en la superficie mojada. Finalmente, en el tercero se deduce el amortiguamiento de las fuerzas de segundo orden igualando la energía radiada por una embarcación oscilante debido a las olas incidentes.
Se han llevado a cabo varios estudios para investigar las fuerzas y la respuesta de las diferentes configuraciones de semisumergibles tanto en oleaje regular como irregular, así como en aguas someras y profundas. La combinación del tirante de agua y la longitud de la ola sirven para determinar si el tirante de agua corresponde a aguas someras, intermedias o profundas desde un punto de vista hidrodinámico. El tirante de agua se considera profundo si este es mayor a un medio de la longitud de ola y si se encuentra en aguas someras, igualmente, si este es menor a 0.5 de la longitud de la ola (Sarpkaya e Isaacson, 1981).
Chakrabarti (1985) da una sugerencia simple en la que la ecuación de Morison solo debe aplicarse a estructuras donde sus dimensiones sean pequeñas, comparadas con la longitud de la ola. De lo contrario, si sus dimensiones son grandes en comparación con la longitud de la ola, la estructura alteraría el campo de la ola y, por ende, la teoría de difracción es más adecuada.
En ese mismo año, Bearman et al. (1985) llevó a cabo un análisis teórico para investigar los coeficientes de inercia y arrastre de cilindros en flujo oscilatorio viscoso para valores pequeños de números de Keulegan-Carpenter (KC). Los resultados fueron comparados con mediciones experimentales y mostraron que el análisis es válido para números de KC menores a 2. Además, se encontró que para números de KC mayores el coeficiente de arrastre es directamente proporcional al número de KC. Si la contribución viscosa se resta, el coeficiente de inercia disminuye rápidamente con el incremento del número de KC.
Años más tarde, Babu y Raja (1987) llevaron a cabo un estudio de la variación de algunos parámetros de diseño en el comportamiento de una semisumergible. Los parámetros considerados fueron: calado, relación entre la columna y el desplazamiento total, número de columnas por pontones, distancia longitudinal entre columnas y distancia transversal entre pontones. Aplicando la teoría del potencial lineal para estimar los movimientos en arfada, avance y deriva de una semisumergible, los resultados numéricos en comparación con la información experimental fueron aceptables.
Investigaciones en este campo normalmente harían uso de ensayos a tamaño real, modelos a escala y simulaciones numéricas. Sin embargo, los ensayos a escala real son muy costosos y consumen demasiado tiempo para llevarse a cabo con frecuencia y no podrían proveer más información de la que se puede obtener de modelos a escala o de simulaciones numéricas. Además, las condiciones ambientales no podrían ser controladas en pruebas a tamaño real. Por ejemplo, cuando las olas creadas mecánicamente chocan con las fronteras del tanque esto genera olas adicionales que podrían incrementar o disminuir las fuerzas de baja frecuencia (Standing, 1988).
La estimación de las respuestas de movimiento de una estructura flotante, tal como la semisumergible, requiere conocimiento de las características de la estructura y los factores que controlan las respuestas, tales como la rigidez y amortiguamiento del sistema (Clough y Penzien, 1993).
Años más tarde, Dev y Pinkster (1997) mostraron en un estudio las contribuciones del efecto viscoso en las fuerzas de deriva de baja frecuencia en semisumergibles, las cuales poseen fuerzas de restauración bajas en los modos de movimiento horizontal. Empleando técnicas computacionales de teoría de potencial 3D encontraron que las fuerzas de deriva media son diferentes a las encontradas en las pruebas experimentales. Tal discrepancia es dominante en el rango de baja frecuencia, donde los efectos de difracción son menores para estructuras delgadas. Por lo tanto, se cree que es inducido por efectos viscosos.
Por otro lado, establecen que el término de arrastre viscoso de la ecuación de Morison muestra una fuerza media cero sobre alguna parte de la estructura constantemente sumergida, la zona de un cilindro vertical que penetra la superficie del fluido puede conducir a una solución simple de forma cerrada para la estimación de las contribuciones viscosas en las fuerzas de deriva. Concluyen que los resultados de las pruebas validan la teoría, la cual revela el hecho de que los cuerpos constantemente sumergidos no contribuyen a los efectos viscosos en las fuerzas de deriva en un campo de flujo de olas solamente.
Posteriormente Hermans (1999) llevó a cabo un estudio sobre la frecuencia de resonancia de un objeto excitado, en éste se estudian, por un lado, las fuerzas de excitación que generan los movimientos y por el otro la teoría para determinar el amortiguamiento no viscoso. Los resultados analíticos son comparados con resultados experimentales llegando a una buena similitud entre ambos.
Soÿlemez y Atlar (1999) presentaron una comparación entre la ecuación de Morison y el método de panel 2D aplicado a una semisumergible. El método del panel está basado en la técnica ajustada (Frank, 1967). Los autores comentaron que el enfoque de Morison incluye el efecto de las fuerzas viscosas y el efecto de las fuerzas de excitación de avance/retroceso no considerado por el método de panel. Por otro lado, el método de panel 2D toma en cuenta el efecto de la interacción columna-casco y el amortiguamiento de potencial, el cual no se considera por el enfoque de Morison.
Sweetman et al. (2002) consideraron el air gap dinámico entre la superficie de la ola efectiva y la parte inferior de la cubierta de la semisumergible. Además, evaluaron el impacto numérico de los efectos de difracción de segundo orden comparando el comportamiento estadístico de la superficie libre estimada por los métodos numéricos con resultados experimentales. Los resultados de difracción se calcularon con un programa, el cual aplica la teoría de difracción de segundo orden. En ese mismo año Clauss et al. (2002), argumentaron que los movimientos de arfada, cabeceo, balanceo y el air gap, son características clave para considerarse en el diseño de semisumergibles, ya que estarán sujetas a condiciones de estados de mar extremos, las cuales se definen por las condiciones de diseño de estado límite último con una altura de ola de diseño Hs de 100 años y un periodo pico Tp específicos. Sugieren además, la implementación de un estado límite accidental relativo para las llamadas olas extremas, donde se ha observado que efectivamente ocurren. Asimismo, para el estado límite accidental aplicaron el método de panel, el cual emplea el enfoque de flujo potencial y se lleva a cabo en el dominio de la frecuencia para posteriormente realizar una comparación entre estos resultados y los obtenidos en el dominio del tiempo y experimentales, llegando a una buena correlación entre dichos resultados.
Para la reducción en el movimiento de arfada, que es un objetivo principal que se requiere mejorar, el método es incrementar el calado. Al aumentar el calado de 20-25 m a 40 m, el operador de amplitud de respuesta (RAO) en arfada y cabeceo se reducen 50 % aproximadamente, de acuerdo con (Bindingsbø y Bjørset, 2002).
Sunahara (2004) investigó las fuerzas que actúan en una plataforma con 16 columnas y midieron las fuerzas hidrodinámicas simultáneamente en cada columna. Además, se verificaron si las grandes fuerzas medidas son fuerzas viscosas. Esto confirmó que las fuerzas de deriva viscosas significantes actúan en un cilindro para periodos de olas largas. Finalmente, presentaron una investigación para una región aplicable de componentes viscosos y de potencial de las fuerzas de deriva de ola que actúan en cilindros verticales.
Chakrabarti et al. (2007) analizaron una semisumergible con pontón de armadura (TPS) respecto a los movimientos de arfada y cabeceo, comparando los resultados obtenidos de la teoría de difracción lineal y la ecuación de Morison simplificada. De Conti et al. (2008) adoptaron un enfoque simplificado permitiendo una visión sobre el comportamiento de una semisumergible respecto a la geometría. Los resultados numéricos obtenidos a través de este método fueron comparados con resultados experimentales obteniendo razonables similitudes.
Xiao et al. (2009) investigaron de forma numérica y experimental los movimientos de arfada, balanceo y cabeceo de baja frecuencia de una semisumergible. En el estudio encontraron que las fuerzas viscosas son importantes para movimientos de balanceo y cabeceo, pero despreciables para el movimiento de arfada. Además, observaron que la resonancia inducida en balanceo y cabeceo debida a las fuerzas de deriva del viento varian lentamente y son mucho mayores que las inducidas por las fuerzas de deriva del oleaje.
Yue et al. (2009) presentaron un algoritmo compuesto/integrado basado en un proceso por etapas con el objetivo de mejorar la eficiencia y prestar atención a la estabilidad y seguridad de una semisumergible de perforación. Aplicaron diferentes algoritmos de diseño para marcar la parte de la cubierta inferior y superior, es decir, la parte de la cubierta superior se diseña de acuerdo con el costo de transportación más bajo, mientras que los cálculos de la parte de la cubierta inferior se basan con el alcance de mejor ajuste. La metodología de diseño general puede proporcionar una referencia para la implementación de diseños específicos asociados a las nuevas tecnologías en el mar del Sur de China de plataformas semisumergibles.
Li et al. (2011) estudiaron y compararon el comportamiento hidrodinámico y de movimientos globales de plataformas típicas en aguas profundas en condiciones ambientales en el Mar del Sur de China. Los resultados indicaron que los movimientos en arfada y especialmente en cabeceo en TLPs son favorables. La respuesta en arfada de la plataforma tipo Spar es perfectamente comparable con la de la TLP, cuando el periodo pico del estado de mar es bajo. Mientras, que el cabeceo de la Spar es mucho más grande que el de la semisumergible y la TLP.
Matos et al. (2011) probaron y evaluaron diferentes aproximaciones hidrodinámicas, de los resultados obtenidos de estas comparaciones propusieron una metodología basada en el enfoque de ruido blanco para el espectro de fuerzas. Concluyeron que la validez de tales aproximaciones se atribuye a los niveles típicamente bajos de amortiguamiento en los movimientos de arfada, cabeceo y balanceo.
Domala et al. (2014) llevaron a cabo un estudio sobre el efecto de la geometría de las columnas y los pontones, así como de su arreglo para obtener una respuesta mínima en los movimientos de arfada, cabeceo, avance y deriva. Los resultados mostraron que el efecto de la geometría del casco, la forma y arreglo de las columnas y pontones, impactan sobre las respuestas de arfada y cabeceo de semisumergibles, por lo que pueden usarse para llegar a la forma, dimensiones y arreglos adecuados de columnas y pontones con la finalidad de obtener una respuesta de movimientos mínima.
Kyoung et al. (2014) diseñaron tres cascos y evaluaron las respuestas de movimiento globales de los cascos para tres diferentes pesos de cubierta a una profundidad de 6000 ft. Utilizaron un programa de Dinámica de fluidos computacionales para diseñar y evaluar la geometría de los cascos. Los resultados mostraron que los nuevos diseños propuestos de los cascos disminuyeron el desplazamiento vertical e incrementaron su periodo natural a través de la masa adherida, reduciendo el movimiento vertical en estados de mar con periodos pico altos.
Wang et al. (2015) llevaron a cabo una comparativa de dos semisumergibles con pontones gemelos no simétricos con y sin arrostramiento horizontal. Los resultados numéricos mostraron que existen efectos de acoplamiento significante de arfada-balanceo/arfada-cabeceo en la nueva semisumergible debido a la forma no simétrica de los pontones. Las respuestas de los movimientos de la nueva semisumergible son generalmente satisfactorios para estados de mar típicos.
Xiong et al. (2016) estudiaron el desempeño global de una semisumergible basado en simulaciones numéricas y experimentales, además investigaron el efecto de los factores ambientales y el sistema de amarre sobre las respuestas de movimientos.
Zhang et al. (2017) estudiaron el desempeño hidrodinámico global de una plataforma flotante semisumergible para optimizar la forma del casco en trabajos futuros. Los resultados computacionales mostraron que las respuestas de movimiento en olas de cresta corta son mucho más pequeñas que las de cresta larga.
Gao et al. (2018) propusieron e investigaron un concepto nuevo e innovador de semisumergible, denotado como plataforma de columna múltiple (MCP). El concepto de columna central y pontón ofrece una mejora favorable en los movimientos de arfada, avance, deriva y cabeceo comparados con los de una semisumergible convencional.
Descripción del sistema flotante en estudio
Los sistemas flotantes tipos semisumergibles son estructuras que se utilizan comúnmente para diversas funciones en la industria costa afuera como: producción de petróleo, grúas de gran capacidad, así como plataformas de perforación. Actualmente, también se emplean sistemas flotantes tipo semisumergible para el desarrollo de campos eólicos costa afuera, donde debido al tirante de agua es necesario instalar las turbinas eólicas en un sistema flotante. Estos sistemas están constituidos básicamente de una cubierta metálica soportada por un casco, el cual está conformado por un conjunto de columnas y pontones; las columnas generalmente son de sección circular o rectangular hueca; la forma de los pontones y el número de columnas depende de la configuración estructural y el servicio requerido. Dichos sistemas permanecen en la localización mediante sistemas de amarre o sistemas de posicionamiento dinámico dependiendo de las funciones de la plataforma; los sistemas de amarre se usan comúnmente cuando se requiere permanecer en la misma localización por largos periodos, esto debido a que su costo es menor comparado con la operación de sistemas con posicionamiento dinámico. En este trabajo se consideran tres diferentes capacidades de producción debido a que son referentes para ser utilizados en función de posibles volúmenes esperados de producción, que se considerarían económicamente rentables para el desarrollo de un sistema flotante con estas características en aguas profundas o ultra profundas.
Definición de las variables de diseño
Como primer paso, se lleva a cabo una recopilación sobre la información sobresaliente de los sistemas flotantes existentes que permitan definir de manera más realista los valores de las variables de diseño. Una parte importante de la información que se procesa en esta sección se obtiene de diferentes artículos y notas de divulgación en la revista Offshore Magazine (2011). En las Figuras 1 a 3 se muestran datos y regresiones lineales de los datos recabados en esta revista de divulgación. Con base en la regresión de los datos que se muestran en la Figura 1, se obtiene un peso estimado de la cubierta de 18 000, 24 000 y 29 000 toneladas, respectivamente, para los tres volúmenes de producción considerados (100, 150 y 200 MBD). Asimismo, con estos valores de producción y la regresión que se muestran en la Figura 2 se obtiene un estimado de la masa del volumen desplazado (i.e. el producto del volumen sumergido por el peso específico del fluido) requerido de 50 000, 80 000 y 100 000 toneladas, para cada uno de los volúmenes de producción considerados. Finalmente, los pesos estimados de los cascos, con base en los datos y la regresión de la Figura 3, resultan de 18 000, 30 000 y 40 000 toneladas, respectivamente para cada uno de los casos de producción.



En la Tabla 1 se presentan las variables de diseño que se consideraron en el presente trabajo.
Tabla 1: Matriz de variables de diseño
| Producción (MBD) | Columnas | Calado D (m) | Pontones | |||
|---|---|---|---|---|---|---|
| Separación L (m) | Ancho B (m) | Altura H (m) | Ancho BP (m) | Altura HP (m) | ||
| 16 | ||||||
| 100 | 18 | 10 | 10 | |||
| 20 | 12 | 12 | ||||
| 22 | 14 | 14 | ||||
| 18 | ||||||
| 150 | 85 | 20 | 40 | 20 | ||
| 90 | 22 | 43 | 22 | 12 | 12 | |
| 95 | 24 | 46 | 24 | 13 | 13 | |
| 20 | 15 | 15 | ||||
| 200 | 22 | |||||
| 24 | ||||||
| 26 | ||||||
Para poder identificar cada uno de los 2916 modelos que se evalúan, se utiliza la etiqueta con el formato LxxBxxHxxDxxBPxxHPxx. En esta etiqueta, Lxx corresponde a la distancia entre columnas, Bxx al ancho de la columna, Hxx a la altura de columna, Dxx al calado, BPxx al ancho de los pontones, y HPxx a la altura de los pontones.
El mecanismo de control del calado es con el llenado de los tanques en los pontones con lastre (agua de mar). Todos los modelos cuentan con cinco tanques en cada pontón y estos se llenan de acuerdo con el calado que se requiera, y también con las características geométricas de las columnas y pontones y del peso del casco y cubierta.
Para el caso del desplazamiento de 50 000 toneladas el ancho de las columnas es de 18 m, la altura de la columna es de 43 m con anchos y alturas de pontones de 10 m y el peso del casco es de 22 921 toneladas. Por otro lado, para el desplazamiento de 80 000 toneladas se tiene un ancho y altura de columnas de 24 m y 43 m con ancho y altura de pontones de 13 m y 15 m, respectivamente; y el peso del casco es de 40 734 toneladas. Finalmente, para el desplazamiento de 100 000 toneladas se tiene ancho y altura de columnas de 26 m y 43 m, ancho y altura de pontones de 15 m, respectivamente; y con peso del casco de 46 258 toneladas.
En el presente trabajo se usa el programa SESAM (DNV), dadas sus características para la solución de este tipo de sistemas, el cual está integrado por una serie de módulos. El primer módulo conocido como GeniE es donde se define la geometría y propiedades de los modelos de semisumergible, en el segundo módulo conocido como HydroD es donde se calcula la estabilidad y se llevan a cabo los análisis hidrodinámicos; y el último módulo es el llamado Postresp, en el cual se obtienen los resultados, como por ejemplo, los operadores de amplitud de respuesta para cada modelo y cada grado de libertad, así como las respuestas máximas más probables para los diferentes estados de mar considerados. El proceso se automatiza utilizando el módulo SESAM Manager DNV Manager (2011a).
En la Figura 4 se muestran las variables de diseño que se consideraron para ser estudiadas en este trabajo donde: L es la longitud total de la semisumergible, B es el ancho de las columnas, H es la altura de las columnas, HP y BP son la altura y ancho del pontón, respectivamente.

Análisis hidrodinámico
En el presente trabajo se lleva a cabo el análisis hidrodinámico tomando en cuenta direcciones de incidencia del oleaje de 0º a 90º, con incrementos de 15º, así como un rango de periodos de oleaje de 3 a 35 s. Debido a que el sistema tiene dos ejes de simetría, el rango de direcciones seleccionado cubre todo el rango de 0º a 360º. Por otro lado, el rango de periodos de oleaje seleccionado concentra el mayor contenido de energía del oleaje, además de que en este se identifican los periodos naturales de vibrar para los diferentes modelos de los sistemas flotantes considerados en este estudio y para cada grado de libertad considerado (i.e. arfada, cabeceo y balanceo).
En una descripción del estado de mar a corto plazo las propiedades estadísticas de las olas se tratan como invariantes durante un periodo que dura unas pocas horas. La superficie del mar se considera como la suma de un número infinito de olas sinusoidales con diferentes frecuencias y direcciones con ángulos de fase aleatorio. La distribución de la energía de las olas según las frecuencias de los componentes de las mismas está representada por un espectro de oleaje, en este caso se consideró el espectro de Pierson-Moskowitz, definido por la ecuación 1 (DNV, 2011b). El análisis hidrodinámico se realiza en el dominio de la frecuencia, incluyendo las contribuciones de fuerzas viscosas, por lo que para considerar dichas contribuciones en el análisis hidrodinámico es necesario linealizar las contribuciones de las fuerzas viscosas en los pontones y columnas, las cuales se toman en cuenta con los elementos Morison. Para la linealización de las contribuciones de las fuerzas viscosas se empleó un estado de mar definido por el espectro de Pierson-Moskowitz con altura de ola significante Hs de 10 m y periodo pico Tp igual a 12 s. Adicionalmente, para la obtención de los espectros de potencia y las respuestas máximas más probables, para una localización en el Golfo de México, se utilizaron 18 espectros de oleaje (Hs y Tp) asociados al contorno ambiental de la localización para un periodo de retorno de 100 años, como se muestra en la Figura 5.

Figura 5: Contorno ambiental para un periodo de retorno de 100 años para una localización del Golfo de México
Los trenes de oleaje regular con amplitud unitaria se utilizan para el cálculo de los operadores de amplitud de respuesta (RAO, Response Amplitud Operator), los cuales se combinan con los espectros de oleaje asociados a los estados de mar considerados y así se obtiene la densidad espectral de potencia de las respuestas, a partir de estos se obtiene la respuesta máxima más probable.
La ecuación de movimiento que se resuelve para obtener los operados de amplitud de respuesta (RAOs, Response Amplitud Operator) se presenta en la ecuación 2 (Faltinsen, 1990).
Donde:
ẍ, ẋ y x = |
vectores de aceleraciones, velocidades y desplazamientos, respectivamente |
M = |
matriz de masa |
A(ω) y B(ω) = |
matriz de masa adherida y de amortiguamiento, las cuales son dependientes de la frecuencia |
C = |
matriz de rigidez debida a la rigidez hidrostática y al sistema de amarre |
F(ω) = |
vector de fuerzas debidas al oleaje, viento y corriente oceánica |
Es importante mencionar que en este estudio no se toma en cuenta el sistema de amarre, debido a que el estudio está enfocado a evaluar el efecto de las variables de diseño del casco en la respuesta de la semisumergible y que está dominada por la misma geometría del casco, por eso únicamente se consideran los grados de libertad que están directamente dominados por la geometría del casco como son el movimiento vertical (arfada), el giro alrededor del eje x (balanceo), y el giro alrededor del eje y (cabeceo).
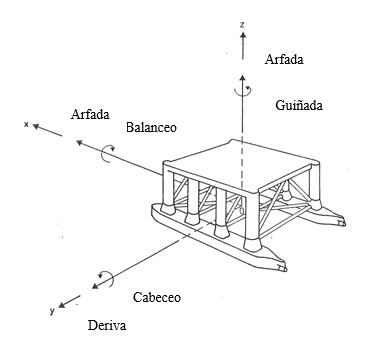
Como se muestra en la Figura 6 este tipo de sistemas cuentan con seis grados de libertad de los cuales tres de ellos son movimientos traslacionales (avance-retroceso, deriva y arfada) y los tres restantes son movimientos rotacionales (balanceo, cabeceo y guiñada). En este estudio solo son considerados los que se encuentran principalmente dominados por la geometría del casco (balanceo, cabeceo y arfada).
A partir de la ecuación de movimiento se obtienen los operadores de amplitud de respuesta conocidos como RAOs, los cuales son funciones de transferencia que describen la respuesta de una estructura en olas regulares de amplitud unitaria sobre un rango de frecuencias. La amplitud de la respuesta se normaliza respecto a la amplitud de la ola, que puede ser calculada de acuerdo con la ecuación 3 (Faltinsen, 1990), donde F0 es la amplitud del complejo de fuerza de excitación lineal por altura de ola.
Teoría de oleaje lineal
Se requiere determinar el potencial de velocidad Φ perteneciente a la región del fluido. Esto se satisface con la ecuación 4, ecuación de Laplace (Sarpkaya, 2010):
La cual está sujeta a las condiciones de frontera descritas por las ecuaciones 5 y 6 (Sarpkaya, 2010):
Al considerar una ola senoidal de frecuencia ω como se muestra en la Figura 7 y tomar el eje x en dirección perpendicular para la cresta de la ola y en dirección de la propagación, se tiene además una superficie libre perturbada como se presenta en la ecuación 7 (Brebbia & Walker, 1979).

Donde η es la solución unidimensional de la ecuación de Helmholtz, la cual se presenta en la ecuación 8 (Brebbia & Walker, 1979).
La elevación tiene una solución armónica tal como la ecuación 9 (Brebbia & Walker, 1979).
Donde k es el número de la ola, el cual se obtiene de la ecuación 10 (Brebbia & Walker, 1979).
Considerando el número de ola se tiene la ecuación 11 (Brebbia & Walker, 1979).
La ecuación 11 representa una ola lineal de Airy de amplitud a 0 viajando en dirección x con una velocidad de fase o celeridad c, dada por la ecuación 12 (Brebbia & Walker, 1979).
Utilizando las condiciones de frontera de la superficie libre linealizada, se puede escribir el potencial de velocidad de movimiento mediante la ecuación 13 (Brebbia &Walker, 1979).
Y la relación de dispersión vincula la frecuencia con el número de ola, como se muestra en la ecuación 14 (Brebbia &Walker, 1979).
Cabe señalar que en aguas profundas dicha relación puede considerarse como se muestra en la ecuación 15 (Brebbia & Walker, 1979).
Esto debido a que la tanh kd tiende a 1 para valores grandes de kd. Lo cual aplica para aguas profundas. Por lo tanto, el tirante de agua puede considerarse profunda, si la profundidad es más de la mitad de la longitud de la ola.
Descripción de los modelos numéricos
Para cada uno de los modelos que se analizaron se generaron los archivos correspondientes al modelo de paneles y al modelo de Morison como se muestra en la Figura 8 y 9, respectivamente.


En los análisis hidrodinámicos realizados se utilizó el modelo compuesto, el cual es un modelo hidrodinámico adecuado para estructuras que constan de elementos esbeltos y de gran volumen. Para considerar los efectos viscosos, las columnas y pontones se representan con un modelo de Morison y para obtener las fuerzas de difracción, masa adherida y amortiguamiento por radiación se representan por un modelo de paneles.
Las fuerzas hidrodinámicas en un modelo compuesto se calculan a partir de la teoría del potencial para el modelo de panel y de la ecuación de Morison para el modelo de Morison. Las fuerzas de excitación hidrodinámicas y las matrices de masas y de amortiguamiento de ambos modelos se combinan para resolver la ecuación de movimiento para el modelo compuesto.
La cinemática de ola aplicada en la ecuación de Morison puede tomarse del campo de ola incidente o se puede especificar que dependa del campo de ola difractada generado al resolver el problema de difracción para la parte del modelo de paneles en el modelo compuesto.
Cálculo de las respuestas extremas
En esta sección se muestran los espectros de potencia (siendo este el producto de la función de transferencia al cuadrado por el espectro del oleaje |RAO(ω)|2⋅S(ω)) de algunas respuestas. Es importe mencionar que estos se calculan para las diferentes respuestas (arfada, cabeceo, balanceo, aceleraciones, fuerzas y momentos), las siete direcciones de oleaje, para cada uno de los espectros de oleaje considerados, los cuales se mencionan en la sección de análisis hidrodinámico. En la Figura 10 se muestra el espectro de potencia de la respuesta de arfada cuando se varía el ancho de la columna, para el volumen de producción de 150 MBD, no existe una tendencia respecto al periodo. Sin embargo, se observa una reducción en el espectro de potencia en el rango de 15 a 20 s y los picos máximos se presentan cercanos a los 15 s cuando el ancho de la columna se incrementa.

Figura 10: Espectro de potencia para la dirección de oleaje a 0º en arfada variando el ancho de columna
Para el caso de la variación del calado para los tres diferentes modelos que se presentan, el periodo es de aproximadamente 12 s donde se encuentran los puntos máximos, como se puede observar en la Figura 11. Además de que la máxima ordenada del espectro de potencia se reduce si el calado disminuye.

Por otro lado, se puede observar una tendencia más estable para el caso del espectro de potencia para la respuesta en cabeceo cuando se varía el ancho de la columna, como se muestra en la Figura 12, al disminuirse el ancho de la columna se incrementa el periodo asociado a la máxima ordenada espectral, así como el valor de la máxima ordenada espectral. Lo mismo sucede al variar el valor del calado como se muestra en la Figura 13, los valores en la máxima ordenada espectral para la respuesta de cabeceo disminuyen al aumentar el calado y solo se observa una ligera variación en el periodo entre cada uno de ellos. Además de que el valor del periodo se acerca más a 12 s.

Figura 12: Espectro de potencia para la dirección de oleaje a 0º en cabeceo variando el ancho de columna

Discusión de resultados
En las Figuras 14, 15 y 16 se muestran los operadores de amplitud de respuesta de arfada para la dirección de oleaje a 0º, para los tres volúmenes de producción considerados. En estas figuras el eje horizontal corresponde a los periodos del oleaje de 3 a 35 s y el eje vertical corresponde al valor del operador de amplitud de respuesta. Los resultados presentados son para los cuatro anchos de columna considerados, los cuales están divididos en cuatro grupos que se diferencian por el tipo de línea, además, también se varía el calado por lo que cada grupo está conformado de tres líneas. Si se comparan los resultados de estas tres gráficas se puede observar lo siguiente: en términos del valor máximo del RAO en arfada, correspondiente al periodo natural en arfada para las semisumergibles con volúmenes de producción de 100 y 200 MBD, se encuentra por encima de los 5 m/m. Mientras que para el volumen de producción de 150 MBD el pico máximo se encuentra por debajo de los 5 m/m.

Figura 14: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 100 MBD

Figura 15: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 150 MBD

Figura 16: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 200 MBD
En términos de valor mínimo del RAO en arfada para el caso del volumen de producción de 100 MBD se encuentra por encima de los 2 m/m. Sin embargo, para los volúmenes de producción de 150 y 200 MBD este valor se encuentra por debajo de los 2 m/m. En el caso del RAO en cabeceo para los tres volúmenes de producción el valor mínimo está por encima de los 2º/m.
Por otro lado, en las Figuras 17, 18 y 19 se presentan los RAOs, pero únicamente la influencia que tiene el ancho de la columna, como se observa al incrementar el ancho de la columna donde existe un corrimiento en el periodo. Sin embargo, si las demás variables se conservan y lo que se varia es el calado, el periodo se conserva, pero se modifica su amplitud debido a que al incrementar el calado la magnitud se incrementa como se puede observar en las Figuras 20, 21 y 22.

Figura 17: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 100 MDB: influencia del ancho de la columna

Figura 18: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 150 MDB: influencia del ancho de la columna

Figura 19: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 200 MDB: influencia del ancho de la columna
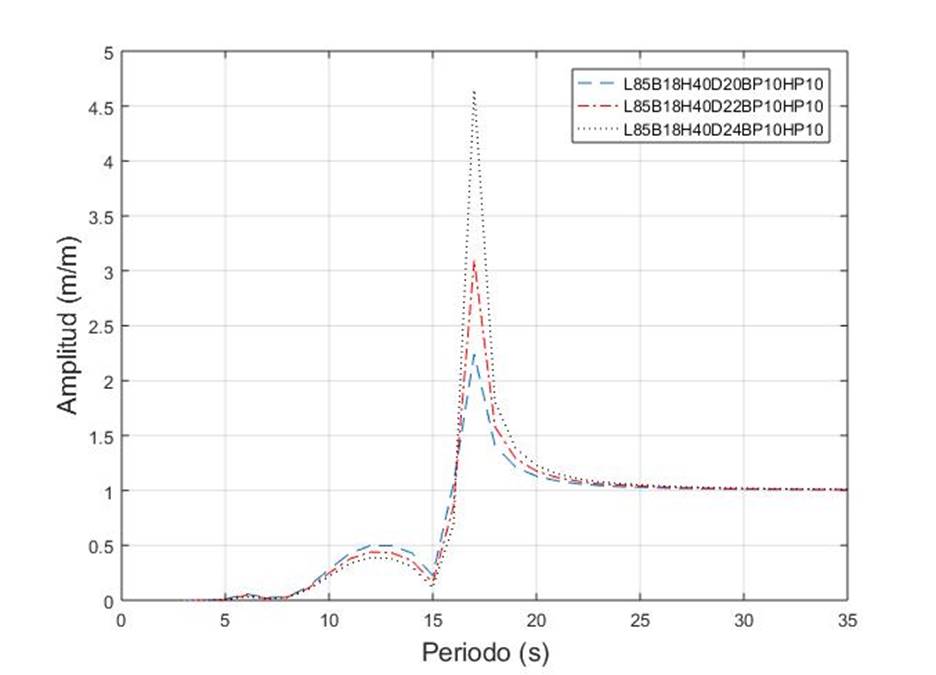
Figura 20: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 100 MBD: influencia del calado

Figura 21: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 150 MBD: influencia del calado
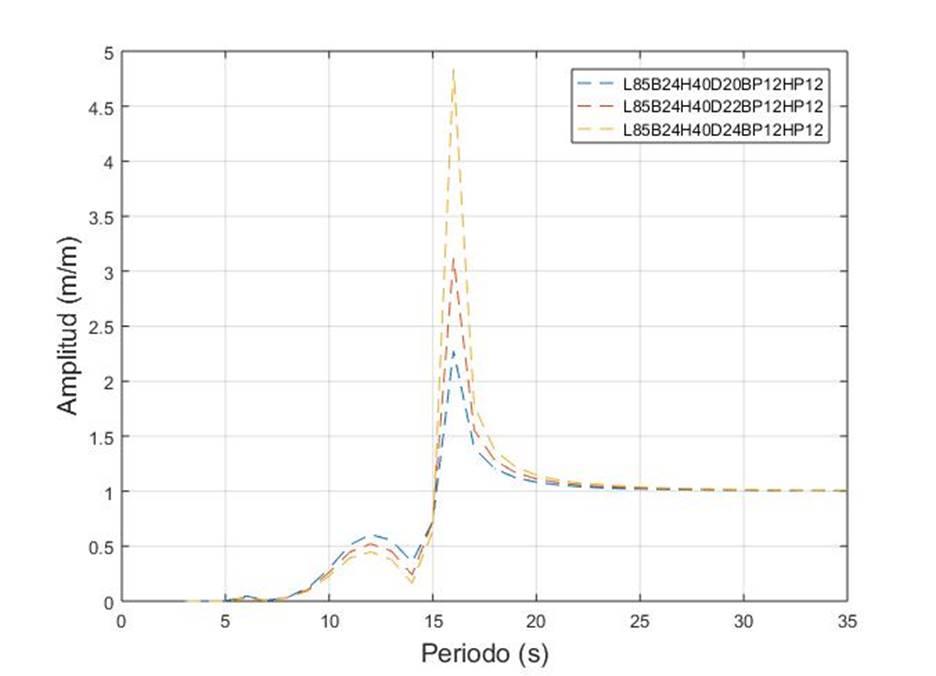
Figura 22: Operador de amplitud de respuesta del movimiento en arfada para el volumen de producción de 200 MBD: influencia del calado
En las Figuras 23, 24 y 25 se muestran los RAOs del movimiento en cabeceo para diferentes anchos de columna y calados, los cuales se distinguen por el tipo de línea. Sin embargo, para poder observarlo de manera más fácil, en las Figuras 26 a la 28 se muestra únicamente la influencia que tiene la variación del ancho de la columna y el comportamiento es similar a lo que pasa con el movimiento en arfada, ya que al incrementar el ancho de la columna existe un corrimiento en el periodo. Sin embargo, al variar el calado no tiene el mismo comportamiento que ocurre en el movimiento de arfada, donde el periodo se conserva debido a que existen variaciones en el periodo y que además para los volúmenes de producción de 100 y 150 MBD no existe una relación tan directa si el calado incrementa, o no necesariamente, la amplitud en los operadores de respuesta incrementan como se puede observar en las Figuras 29 y 30. Mientras que en la Figura 31 si se cumple que al incrementar el calado la magnitud del movimiento se incrementa.

Figura 23: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 100 MBD

Figura 24: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 150 MBD

Figura 25: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 200 MBD

Figura 26: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 100 MBD: influencia del ancho de la columna

Figura 27: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 150 MBD: influencia del ancho de la columna

Figura 28: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 200 MBD: influencia del ancho de la columna

Figura 29: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 100 MBD: influencia del calado

Figura 30: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 150 MBD: influencia del calado

Figura 31: Operador de amplitud de respuesta del movimiento de cabeceo para el volumen de producción de 200 MBD: influencia del calado
En las Figuras 32 a 34 se muestran los RAOs en arfada con la variación considerada en este trabajo de la altura de las columnas para los tres volúmenes de producción, se observa que no existe influencia alguna debido a que, si se varia la altura y se mantienen las otras variables de estudio, la amplitud y el periodo son los mismos.

Figura 32: Operador de amplitud de respuesta en arfada para el volumen de producción de 100 MBD: influencia de la altura de la columna

Figura 33: Operador de amplitud de respuesta en arfada para el volumen de producción de 150 MBD: influencia de la altura de la columna

Figura 34: Operador de amplitud de respuesta en arfada para el volumen de producción de 200 MBD: influencia de la altura de la columna
En las Figuras 35 a 37 se muestran los resultados de los operadores de amplitud de respuesta en arfada de los tres volúmenes de producción, variando la distancia entre columnas y fijando las variables de estudio restantes. Como se observa, la influencia de la separación entre columnas afecta en la magnitud de la amplitud, pero no incrementa de manera proporcional con el aumento en la distancia entre columnas, debido a que esta no solo altera la masa adherida, sino que además modifica el amortiguamiento al variar dicha dimensión, así como las fuerzas de excitación debidas al oleaje, lo cual también influye en el cálculo de la amplitud.

Figura 35: Operador de amplitud de respuesta en arfada para el volumen de producción de 100 MBD: influencia de la separación entre columnas

Figura 36: Operador de amplitud de respuesta en arfada para el volumen de producción de 150 MBD: influencia de la separación entre columnas

Figura 37: Operador de amplitud de respuesta en arfada para el volumen de producción de 200 MBD: influencia de la separación entre columnas
En las Figuras 38 a 40 se presentan los resultados de los operadores de amplitud de respuesta variando el ancho del pontón, como se puede observar existe un incremento en el periodo al incrementar el ancho del pontón, lo cual era de esperarse, además se presenta una variación en la amplitud. Sin embargo, no se muestra una tendencia directamente proporcional debido a que también el amortiguamiento se ve modificado y por ende este afecta el valor de la magnitud en la amplitud del RAO.

Figura 38: Operador de amplitud de respuesta en arfada para el volumen de producción de 100 MBD: influencia del ancho del pontón

Figura 39: Operador de amplitud de respuesta en arfada para el volumen de producción de 150 MBD: influencia del ancho del pontón

Figura 40: Operador de amplitud de respuesta en arfada para el volumen de producción de 200 MBD: influencia del ancho del pontón
Finalmente, de la Figura 41 a la 43 se presentan los resultados de los operadores de respuesta en arfada variando la altura del pontón, como se observa para el volumen de producción de 100 MBD. Al incrementar la altura del pontón se presenta un aumento en el periodo, mientras que la amplitud decrece al aumentar la altura del pontón. Sin embargo, para el volumen de producción de 150 y 200 MBD no se observa esa misma tendencia que se tiene en el volumen de producción de 100 MBD, lo que podría deberse a que existe un aumento en las dimensiones del pontón debido a que el peso de la cubierta también se incrementa.
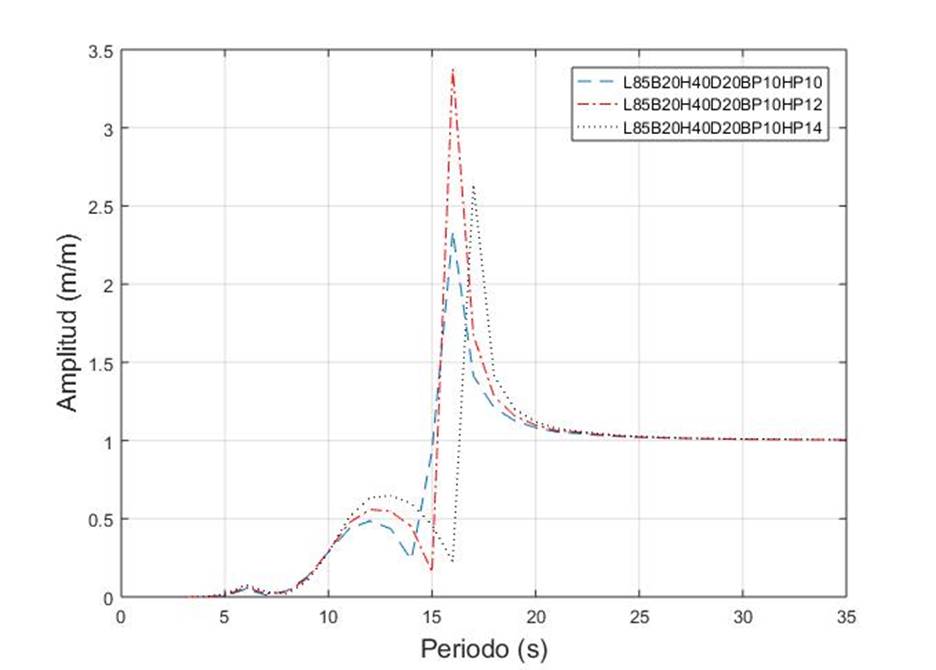
Figura 41: Operador de amplitud de respuesta en arfada para el volumen de producción de 100 MBD: influencia de la altura del pontón

Figura 42: Operador de amplitud de respuesta en arfada para el volumen de producción de 150 MBD: influencia de la altura del pontón
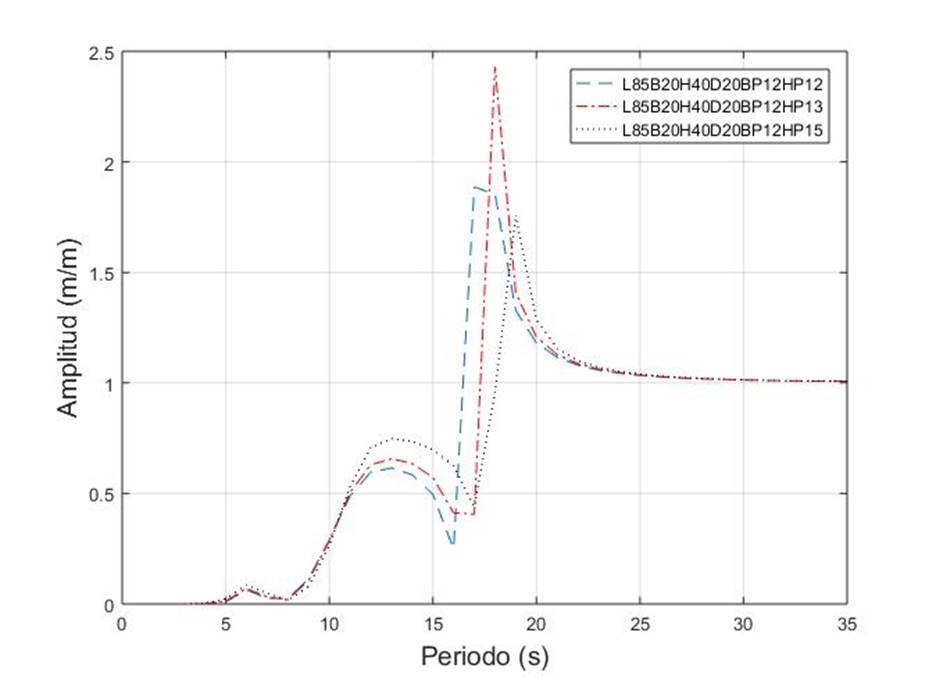
Figura 43: Operador de amplitud de respuesta en arfada para el volumen de producción de 200 MBD: influencia de la altura del pontón
Adicionalmente, se calcularon las respuestas máximas más probables (MPMR) que ocurren dentro de un intervalo de tiempo de respuesta máxima Nc y está aproximadamente dada por la ecuación 16.
En caso de un espectro de banda angosta (es decir, ε = 0), la respuesta máxima más probable se calcula con la ecuación 17.
Donde:
Ns = |
número de cruces por cero en el estado de mar a corto plazo. Bajo condiciones de banda angosta, el número por cruces por cero |
Ns = |
número de máximos de la respuesta |
Nc = |
término |
σx = |
desviación estándar de la respuesta |
ε = |
parámetro de ancho espectral |
El número de cruces por cero, Ns, se determina con la ecuación 18 como la relación de la duración del estado de mar a corto plazo, Ds, entre el periodo de respuesta medio de cruces por cero, Tx(DNV Manual, 2007).
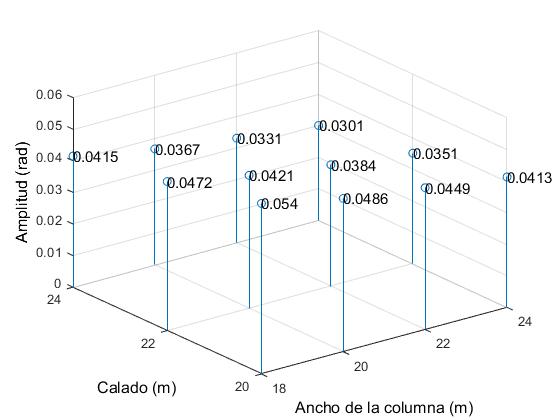
En la Figura 44 se muestran las respuestas máximas más probables (MPMR) del desplazamiento en arfada de 12 diferentes modelos de plataformas, las cuales se identifican de la siguiente manera: L85B18H40D20BP12HP12, L85B18H40D22BP12HP12, L85B18H40D24BP12HP12, L85B20H40D20BP12HP12, L85B20H40D22BP12HP12, L85B20H40D24BP12HP12, L85B22H40D20BP12HP12, L85B22H40D22BP12HP12, L85B22H40D24BP12HP12, L85B24H40D20BP12HP12, L85B24H40D22BP12HP12 y L85B24H40D24BP12HP12.

Como se puede observar, únicamente se muestra la variación del ancho de la columna y el calado conservando las variables de diseño restantes fijas. Además, se obtiene el valor máximo de las MPMR de los 18 espectros de oleaje y las siete direcciones de incidencia de oleaje consideradas llegando a un total de 126 valores de MPMR. En el eje x se presenta el calado, el eje y corresponde al ancho de la columna y el eje z representa la amplitud de la MPMR. Como se puede observar el valor máximo de la MPMR se tiene cuando se combina un calado de 24 m y un ancho de columna de 24 m. Además se aprecia que al incrementar el calado y mantener el ancho de columna de 18 m se tiene la amplitud de la MPMR más pequeña de los modelos comparados. La tendencia que se observa es que al incrementar el ancho de la columna y el calado la amplitud de la MPMR aumenta.
En la Figura 45 se muestran las respuestas máximas más probables (MPMR) del desplazamiento del movimiento de cabeceo. Se utilizaron los mismos modelos que se presentaron en la Figura 44, así como los valores máximos de los 18 espectros de oleaje y las siete direcciones de incidencia del oleaje consideradas, llegando a un total de 126 valores de MPMR. El eje x representa el calado, el eje y corresponde al ancho de la columna y el eje z representa la amplitud de la MPMR. Como se puede observar, la respuesta máxima se encuentra cuando se tiene un calado de 20 m y un ancho de columna de 18 m. Además, se observa que al incrementar el ancho de columna y el calado la respuesta disminuye. Lo mismo pasa si el ancho de columna se incrementa, pero el calado se conserva.
Conclusiones
Una de las primeras fases de diseño de sistemas flotantes de producción es el dimensionar y establecer la configuración del casco con base en el peso estimado de los módulos de cubierta, mismo que depende de los volúmenes de producción y características de crudo a procesar. Adicionalmente, para definir la configuración del casco de las semisumergibles de producción se debe tomar en cuenta que dicha configuración reduzca la respuesta hidrodinámica y las fuerzas ambientales actuantes, y por ello la importancia de conocer el efecto que tienen las diferentes variables de diseño del casco de una plataforma semisumergible en la respuesta hidrodinámica de la misma.
Con base en los resultados que se obtienen del análisis paramétrico se concluye que, cinco de las seis variables de diseño que se evalúan en este trabajo (i.e. calado, ancho de la columna, distancia entre columnas, ancho y altura de los pontones), impactan de manera importante en la respuesta hidrodinámica de los sistemas flotantes tipo semisumergibles en términos de operadores de respuesta. La altura de la columna en el rango considerado en este trabajo no modifica el periodo y tampoco incrementa la amplitud del movimiento en arfada, pero sí contribuye en mantener el air gap entre la cresta de la ola y la primera cubierta de la superestructura. Por otro lado, de las variables que mayormente influyen en el cálculo del periodo natural son el ancho de la columna y las dimensiones del pontón. El calado es una de las variables que tiene mayor impacto en amplificar o disminuir el valor de los operadores de amplitud de respuesta para los grados de libertad considerados, debido a que para calcular las amplitudes de los operadores de respuesta no solo se necesita la rigidez hidrostática, sino además del amortiguamiento por radiación, las fuerzas de excitación debidas al oleaje, aspecto en el cual el calado impacta de manera directa. Como se pudo observar en las gráficas de los espectros de potencia de las respuestas, el calado es un aspecto que influye de manera directa e importante, y en menor grado las dimensiones de las columnas.
Los resultados de las MPMR del movimiento en arfada confirman que los valores mínimos se presentan para valores altos de calado y anchos de columnas bajos. Sin embargo, para las MPMR del movimiento en cabeceo ocurre lo contrario, es decir, los valores mínimos se observan cuando se tienen valores altos de calado y ancho de las columnas.
En este trabajo se demuestra que existen variables que impactan de manera importante y directa sobre el cálculo de la respuesta hidrodinámica. Por ello, es necesario tomar en cuenta hacer estudios que permitan evaluar este tipo de comportamientos, sobre todo en una primera etapa de diseño, debido a que el diseño de este tipo de estructuras es un proceso sumamente complejo.
Nomenclatura
| A(ω) | Matriz de masa adherida |
| B(ω) | Matriz de amortiguamiento |
| Bxx | Ancho de la columna |
| BPxx | Ancho del pontón |
| c | Celeridad |
| C | Matriz de rigidez hidrostática |
| D | Diámetro del cilindro |
| Ds | Duración del estado de mar a corto plazo |
| Dxx | Calado |
| d | Tirante de agua |
| F0 | Fuerza de excitación de una ola de amplitud unitaria |
| F(ω) | Vector de fuerzas debidas al oleaje, corriente y viento |
| g | Gravedad |
| Hs | Altura de ola significante |
| Hxx | Altura de la columna |
| HPxx | Altura del pontón |
| κ | Numero de ola |
| Lxx | Distancia entre columnas |
| M | Matriz de masa |
| MBD | Miles de barriles diarios |
| MPMR | Respuesta máxima más probable |
| Nc | Número de máximos de la respuesta |
| Ns | Número de cruces por cero en el estado de mar a corto plazo |
| RAOs | Operadores de amplitud de respuesta |
| Tp | Periodo pico |
| Tx | La media del periodo de respuesta de cruces por cero |
| ε | Parámetro del ancho espectral |
| η | Superficie libre |
| λ | Longitud de la ola |
| ω | Frecuencia angular |
| Φ | Potencial de velocidad |
| σx | Desviación estándar de la respuesta |

