Articles
Estimación de la incertidumbre en un sistema de visión para la
evaluación experimental de un mezclador magneto-hidrodinámico
Estimation of the uncertainty in a vision system for the
experimental evaluation of a magneto-hydrodynamic mixer
1Universidad Autónoma de Baja California.
Correo: flores.wendy@uabc.edu.mx
2Universidad Autónoma de Baja California.
Correo: monicavd74@uabc.edu.mx
3Universidad Autónoma de Baja California.
Correo: mbravo@uabc.edu.mx
4Universidad Autónoma de Baja California.
E-mail: mrivas@uabc.edu.mx
5Universidad Autónoma de Baja California.
Correo: dhernan@uabc.edu.mx
6Universidad Autónoma de Baja California.
Correo: julio.rodriguez81@uabc.edu.mx
7Universidad Autónoma de Baja California.
Correo: srgnk@uabc.edu.mx
8Universidad Autónoma de Baja California.
Correo: lindner.lars@uabc.edu.mx
Resumen:
Se presenta la metodología y los resultados de la estimación de incertidumbre de
un sistema de visión basado en iluminación por campo oscuro para la evaluación
experimental de un mezclador magneto-hidrodinámico (MHD, por sus siglas en
inglés). Dicha evaluación se realizó a través de un sistema de visión diseñado
para realizar mediciones de velocidad sobre la superficie libre del micro-fluido
contenido en el mezclador MHD, el sistema de visión permite disminuir la
restricción de transparencia de las paredes del contenedor (mezclador propuesto)
y permite aplicar sus paredes como un par de electrodos distribuidos. La
estructura del mezclador se clasifica como un canal anular abierto. El canal
está formado por dos cilindros de material conductor, una base aislante y una
superficie abierta. El canal anular contiene un micro-fluido de baja
conductividad, el cual se gobierna por la ley de Lorenz debido a la presencia de
un campo magnético y un campo eléctrico, resultando en un proceso de mezclado.
La manipulación de fluidos a través de la MHD es muy útil y de gran interés para
el diseño de sofisticados sistemas micro-electromecánicos (MEMS, por sus siglas
en inglés), en especial para sistemas de microanálisis total (μTAS, por sus siglas en inglés), también conocidos como dispositivos
laboratorio-en-un-chip (LOC, por sus siglas en inglés). Sin embargo, no es una
tarea fácil para un control preciso del micro-fluido, se requiere considerar en
el diseño de los mezcladores algunos parámetros como la forma y tamaño del
canal, conductividad del micro-fluido y la interacción de los campos magnético y
eléctrico. Además, se requiere de una herramienta que permita evaluar el
comportamiento del micro-fluido, en esta ocasión, un sistema de visión basado en
velocimetría en imágenes de partículas (PIV, por sus siglas en inglés), al cual
bajo las especificaciones de experimentación descritas en el presente trabajo se
estimó una incertidumbre de medición de ±0.001152 m/s para perfiles de medición
con comportamiento de velocidad estables, cuya máxima velocidad de perfil es
mayor a 0.003000 m/s y corresponden a micro-fluidos MHD de baja conductividad
compuestos de 100 ml de agua destilada y 0.1 g de esferas S-HGS, inducidos por
un campo magnético de 0.1624 T, un campo eléctrico inducido por la aplicación de
una diferencia de potencial mayor a 4.0 V en un canal anular abierto con
configuración de profundidad de 7 mm, relación de radios de 0.60, y relación de
aspecto de 0.22. Con el sistema de visión se logra obtener una configuración
optimizada geométrica y magnetohidrodinámica de mezcladores que abrirán nuevas
posibilidades en la eficiencia del control automático del proceso de mezclado de
fluidos.
Descrioptores: Magneto-hidrodinámica; micro-fluidos; sistema de visión; mezclador
Abstract:
The methodology and the result of the estimation of uncertainty of a vision
system based on darkfield lighting for the experimental evaluation of a
magneto-hydrodynamic mixer (MHD) are presented. The evaluation was realized
through a vision system designed to perform velocity measurements on the free
surface of the micro-fluid contained in the MHD mixer, said vision system allows
to reduce the transparency restriction of the container walls (proposed mixer)
and allows to apply its walls as a pair of distributed electrodes. The structure
of the mixer is classified as an open annular channel. The channel is formed by
two cylinders of conductive material, an insulating base, and an open surface.
The annular channel contains a micro-fluid of low conductivity, which is
governed by the Lorenz law, due to the presence of a magnetic field and an
electric field, resulting in a mixing process. The manipulation of micro-fluids
through the MHD is very useful and of great interest for the design of
sophisticated micro-electromechanical systems (MEMS), especially for total
microanalysis system (μTAS), known as lab-on-a-chip (LOC) devices. However, it
is not an easy task, for precise control of the micro-fluid it is necessary to
consider in the design of the mixers parameters such as the shape and size of
the channel, conductivity of the micro-fluidic, and the interaction of the
magnetic and electric fields. In addition, a tool is required to evaluate the
behavior of the micro-fluid, on this time, a vision system based on particle
image velocimetry (PIV), to which, under the experimentation specifications
described in this work, a measurement uncertainty of ± 0.001152 m/s was
estimated for measurement profiles with stable velocity behavior, whose maximum
profile velocity is greater than 0.003000 m/s and correspond to low conductivity
MHD fluids composed of 100 ml of distilled water and 0.1 g of S-HGS spheres
induced by a magnetic field of 0.1624 T, an electric field induced by the
application of a potential difference greater than 4.0 V in an open annular
channel with 7 mm depth setting, radius ratio of 0.60, and aspect ratio of 0.22.
With the vision system it will be possible to obtain a geometrically and
magnetohydrodynamic optimized configuration of mixers that will open up new
possibilities in the efficiency of automatic control of the fluid mixing
process.
Keywords: Magneto-hydrodynamic; micro-fluid; vision system; mixer
Introducción
El uso de micro-fluidos en el diseño de sistemas mecánicos es cada vez más frecuente.
Con el desarrollo de novedosas técnicas computacionales el modelado del
comportamiento de los micro-fluidos puede ser muy preciso, lo que permite figurar el
uso de micro-fluidos en el diseño de sofisticados sistemas micro-electromecánicos
(MEMS, por sus siglas en inglés) para aplicaciones en micro escala que requieren de
gran precisión.
Los sistemas electromecánicos requieren energía eléctrica para funcionar, ya que su
tarea esencial es poner piezas en movimiento, la aplicación de micro-fluidos puede
producir el mismo efecto deseado en el movimiento de piezas mecánicas, dotando a los
MEMS de la capacidad para llevar a cabo funciones específicas (Das, 2013), entre las más comunes el bombeo, propulsión,
agitación y mezclado de fluidos, conexiones en red e incluso enfriamiento sin la
necesidad de componentes mecánicos (Kumar,
2011).
En la actualidad, casi todos los mecanismos convencionales pueden perder ciertas
cantidades de energía debido a condiciones como la fricción de sus partes, lo que
resulta un inconveniente para algunas aplicaciones.
El diseño de MEMS está en constante evolución y varias disciplinas se unen al
desarrollo de sistemas para mejorarlos. Una de ellas es el caso de la
magneto-hidrodinámica (MHD), la cual proporciona una solución alternativa al
problema de la fricción gracias a la ventaja de su naturaleza no intrusiva, ya que
no se requiere de elementos mecánicos en movimiento para lograr el funcionamiento de
los MEMS, reduciéndo la posibilidad de averías, vibraciones no deseadas y del ruido,
obteniendo una transformación directa de energía electromagnética a energía
mecánica.
La aplicación de la MHD está ganando constantemente el interés de los diversos campos
de la ingeniería y de la investigación científica para mejorar la tecnología
empleada en naves espaciales, aviones y vehículos marinos, etcétera (Zhang & Chen, 2020).
Recientes experimentaciones han emergido con el propósito de manipular micro-fluidos,
utilizando la inducción de una fuerza de Lorentz para impulsar el movimiento del
micro-fluido, el progreso logrado en este campo multidisciplinario y su incursión en
una gran variedad de aplicaciones se puede seguir a través de la literatura
científica. Algunas de las aplicaciones más comunes son el micro-bombeo (Al-Habahbeh et al., 2016), el
micro-mezclado (Yuan & Kakkattukuzhy,
2014), el control de micro sistemas a través de redes de fluidos (Bau et al., 2003), y el
micro-enfriamiento (Mahabaleshwar et
al., 2020). Sin embargo, aún permanece como área de
investigación, ya que requiere de análisis y da lugar al desarrollo y aplicación de
sistemas de visión máquina para evaluar el comportamiento de micro-fluidos mediante
la medición de las velocidades y direcciones del fluido presente en los MEMS.
Los sistemas de visión son una fuente esencial de información para la integración de
los sistemas mecánicos y micro-fluídicos al proveer la información necesaria para el
análisis, el diseño de la forma, estructura y el rendimiento de mezcladores para
MEMS (Yuan & Kakkattukuzhy, 2014).
El presente artículo introduce el método original optoelectrónico y el modelo
matemático para analizar variedad de campo de velocidades en micro‐fluidos, asimismo
presenta la configuración de un mezclador MHD propuesto, demuestra la validez
teórica y experimental del modelo matemático del mezclador MHD, resume la
metodología de experimentación seguida para la validación del modelo matemático del
mezclador MHD y para la estimación de la incertidumbre del sistema de visión.
Finalmente expresa los resultados y conclusiones, así como la necesidad de futuras
acciones identificadas para la mejora del sistema de visión. Todo esto con el
propósito de contribuir al desarrollo de un novedoso sistema de visión que permita
caracterizar los comportamientos de los distintos micro-fluidos en las variadas
configuraciones de sistemas MHD, enfocados a la optimización de su diseño en
distintas aplicaciones.
Micro-sistemas electromecánicos (MEMS)
El diseño de MEMS permanece en constante evolución y varias disciplinas se involucran
para aportar sus beneficios e ir resolviendo los retos que se presentan.
Los MEMS son útiles para casi todos los campos de aplicación en micro-escala debido a
su bajo consumo de energía, tamaño, costo y capacidad de adaptación (Valenzuela et al., 2017). La
fabricación de MEMS se realiza por lotes, consiste en una serie de sustratos
delgados y planos estructurados como capas, lo que resulta en dispositivos baratos
para sensores y actuadores con una presencia mínima invasiva en las aplicaciones.
Los transductores MEMS convierten la energía de entrada en otro tipo de energía de
salida, estos tipos de energía pueden ser mecánica, óptica, eléctrica, fluídica,
magnética, térmica, etcétera. La función del transductor-sensor MEMS, se encarga
principalmente de medir una cantidad física sin producir efectos de carga, mientras
que la función del transductor-actuador MEMS es mover o controlar un sistema.
Existen MEMS basados en diversos fenómenos como: piezoeléctrico, resonante,
magnético, termo-eléctrico, capacitivo, termo-mecánico, termo-neumático, inductivo,
resistivo, óptico, y los basados en micro-fluidos. Respecto a los basados en
micro-fluidos han surgido un gran número de tecnologías, entre ellas, las basadas en
MHD.
La micro-fluídica permite la interconexión de redes de micro-canales (Bau et al., 2003),
proporcionando a los MEMS funciones de control y de multiplexación para ser parte de
sistemas en diferentes aplicaciones, tales como las cabezas de impresoras de
inyección de tinta, dosificadores micro-bomba no mecánica, detectores de gas y una
larga lista de bio-sensores y sistemas de análisis químicos para alimentos, así como
para propósitos farmacéuticos.
Por otro lado, se consideran fluidos todas aquellas sustancias que se deforman bajo
la acción de un esfuerzo cortante, así, para este modelado se considera como
continuo a pesar de que está formado por millones de moléculas. Por otro lado,
cuando el volumen del fluido es muy pequeño, se estima utilizando el recorrido libre
de las moléculas.
Para canales anulares se pueden predecir los patrones de su fluido por medio del
número de Reynolds, por ejemplo, para números de Reynolds menores a 2300 al patrón
se le llama “flujo laminar” y para números entre 2300 y 4000 el patrón se denomina
“flujo de transición”. De la misma forma, para números mayores el patrón se nombra
“flujo turbulento”. El número de Reynolds se relaciona con la velocidad media del
fluido, el diámetro del canal y la viscosidad del fluido (interpretado como la
relación de fuerzas de inercia a fuerzas viscosas).
Canales magnetohidrodinámicos
El principio de funcionamiento de los canales magnetohidrodinámicos se basa en la
fuerza de Lorentz (Jewett, 2009), la cual
actúa en una solución eléctricamente conductora en presencia de los campos magnético
y eléctrico, lo que resulta en el movimiento de flujo, como se expresa en (1) donde q es la carga móvil sobre la que actúa la fuerza de Lorentz, que tiene una
velocidad v en presencia tanto de un campo eléctrico E y un campo magnético B, experimentando a la vez una fuerza eléctrica qE y una fuerza magnética qv ×B.
F=qE+qv ×B
(1)
En un principio, las soluciones más empleadas fueron los metales líquidos y los gases
ionizados, mientras que en investigaciones recientes se utilizan soluciones
electrolíticas de baja conductividad (Yuan &
Kakkattukuzhy, 2017), aunque las soluciones electrolíticas generalmente
se contaminan debido a las reacciones electroquímicas que ocurren en las superficies
de los electrodos (Mitra, 2011), además de
propiciar la generación de burbujas (Lemoff &
Lee, 2000).
Los canales rectangulares son los más comunes, estos consisten de dos paredes en
paralelo actuando como electrodos (Jang & Lee,
2000), aunque también existen otras configuraciones (Rashidi et al., 2017) como la
del mezclador MHD propuesto, el cual consiste en un canal anular formado por un
anillo interno y otro anillo externo actuando de igual manera como electrodos.
Algunos canales son cerrados y otros abiertos, lo que causa la presencia de una
superficie libre donde se pueden observar los efectos de la tensión superficial, así
como el comportamiento del flujo. El campo magnético se puede inducir por
electroimanes o imanes permanentes, mientras que el campo eléctrico por una fuente
de voltaje o corriente, ya sea continua o alterna (Zhao et al., 2015), ver Figura 1.
Diseño del mezclador magnetohidrodinámico
La configuración del mezclador MHD propuesto consiste en un canal anular abierto, el
electrodo de cobre interno tiene un radio R1 de 18.76 mm, el electrodo de cobre externo tiene un radio R2 de 31.44 mm (R1 < R2 ), con una profundidad h de 7 mm, la base es una pared aislante de 10 x 10 cm hecha de resina
(PSP, por sus siglas en inglés). Es un mezclador con las características principales
que se presentan en un micromezclador y en un microfluido que sería el flujo
laminar. Asimismo, es un prototipo para el análisis de lo que podría presentarse en
un micro-mezclador, donde se consigue el flujo laminar por la baja velocidad de
flujo y donde se presentan vórtices que modifican su estado de laminar a turbulento
debido al cambio brusco de voltaje, es decir, cambio abrupto de velocidad, que se
obtiene cuando las partículas o fluido se encuentran con una velocidad que tiende a
cero, lo que aplica repentinamente un voltaje alto. Este se estabiliza cuando el
fluido alcanza la velocidad de acuerdo con el voltaje aplicado.
El modelado matemático de canales con una profundidad finita requiere que sean
consideradas las fuerzas de arrastre ocasionadas por las superficies del canal,
tanto de la base, como de la tapadera y de las paredes, como se demuestra en Bozkaya (2017). La ecuación diferencial que
representa el comportamiento del flujo se puede resolver por medio del método de
Galërkin con series ortogonales de Bessel-Fourier. El modelado matemático de un
canal anular cerrado se analizó en Ortiz et
al. (2017) considerando los efectos de las cuatro paredes
del canal, mientras que el modelado matemático del canal anular abierto propuesto se
analizó en Valenzuela et al.
(2018b). El canal se encuentra sobre un imán permanente de neodimio, el
cual induce un campo magnético B0 de 0.1624 T en dirección paralela al eje del canal. También cuenta con
una fuente de corriente directa que lo induce a fluir un campo eléctrico a través
del fluido contenido en el canal anular, por medio de la aplicación de una
diferencia de potencial Δϕ entre sus electrodos cilíndricos, de modo que una corriente eléctrica
circula radialmente dentro del fluido. La corriente interactúa con el campo
magnético aplicado, dando lugar a una fuerza de Lorentz que impulsa el fluido en la
dirección azimutal. Cuando la corriente fluye hacia adentro (hacia afuera), el
fluido se moverá en sentido contrario a las manecillas del reloj. Es decir, dicho
fluido es controlado por la fuerza de Lorentz debido a la presencia de los campos
magnético y eléctrico. El fluido circula continuamente en un ciclo cerrado, ya sea
con un perfil de velocidad estable o de manera caótica con formación de vórtices,
dependiendo de la intensidad de corriente suministrada en la conductividad eléctrica σ (la cual de manera ideal debe ser baja y uniforme), de la densidad del
fluido ρ, y de su viscosidad cinética ν. En el caso de un fluido que se mueve en un tubo de sección circular, el
flujo persistente será laminar por debajo de un número de Reynolds crítico de
aproximadamente 2040 (Avila, 2011). El número
de Reynolds que delimita flujo turbulento y laminar depende de la geometría del
sistema; además, la transición de flujo laminar a turbulento es generalmente
sensible a ruido e imperfecciones en el sistema (Reynolds, 1883), estos flujos experimentan una transición repentina del
movimiento laminar al turbulento a medida que aumenta la velocidad, y el inicio de
la turbulencia cambia radicalmente la eficiencia del transporte y las propiedades de
mezcla.
Por otra parte, de acuerdo con la Ley de Fuerza de Lorenz, expresada en (1), en
condiciones de laboratorio el campo magnético inducido por la corriente eléctrica
que circula en el fluido es muy pequeño en comparación con el campo magnético
aplicado a través del imán (Flores et
al., 2017). Esta condición implica que el número magnético
de Reynolds, expresado en (2), tome valores menores a la unidad, es decir, Rm≪1, donde μ0 es la permitividad magnética en el vacío, σ es la conductividad eléctrica, Uc es la escala característica de velocidad y L es la escala característica de longitud (Davidson, 2001).
Ante la aproximación de Rm≪1, las ecuaciones que gobiernan el flujo MHD en el canal anular se pueden
expresar en su forma adimensional (3)-(6), donde u representa a los campos de velocidad, p es presión, j es la densidad de corriente y B es el campo magnético, los cuales son normalizados por Uc, σ∆ϕB0, σ∆ϕ/R2 y B0, respectivamente, y donde la velocidad característica está dada por Uc=R2σ∆ϕB0/ρν. Las coordenadas están normalizadas por R2, que es la escala característica de longitud, mientras que R2/Uc es la de tiempo. Por otra parte, el potencial eléctrico ϕ es normalizado por ∆ϕ. Debido a que el campo magnético es uniforme, el campo magnético
normalizado coincide con el vector unitario en la dirección axial, B=e^z. Además, los números de Hartmann y de Reynolds se definen como Ha=B0R2σ/ρν y Re= ρUcR2/μ, respectivamente. Las ecuaciones de continuidad de Navier-Stokes se
representan por (3)-(4), la ley de Ohm se representa por
(5) y la ecuación para el
potencial eléctrico que considera la conservación de carga por (6). Debido a que se asumirá que el
número de Reynolds es muy pequeño, el término inerte de (4) puede ser descartado. Además, como
la densidad de corriente es puramente radial y el campo magnético uniforme apunta en
la dirección axial, la fuerza de Lorentz es totalmente azimutal.
Por lo tanto, se puede buscar una solución de eje simétrico estable en la forma u=uθr,ze^θ, donde uθ y e^θ son las componentes de velocidad y el vector unitario en la dirección
azimutal. Como se asumirá un número de Hartmann muy pequeño, Ha ≈0.01, el termino de segundo orden Ha2 en (5)-(6) puede ser descartado. Ante esta
consideración el potencial eléctrico se puede determinar al resolver la ecuación de
Laplace ∇2ϕ=0 con las condiciones de frontera expresadas en (7), donde η=R1/R2, cuya solución se expresa en (8).
Rm=μ0σUCL
(2)
∇ ∙u=0
(3)
∂u∂t+u∙∇u=1Re-∇p+∇2u+j×B
(4)
j=-∇ϕ+Ha2u×B
(5)
∇2ϕ=Ha2∇ ∙ u×B
(6)
ϕη=0, ϕ1=1
(7)
ϕr=lnrηln1η
(8)
Las ecuaciones que rigen la presión y el componente de velocidad azimutal se reducen
a (9)-(10), donde ε es la relación de aspecto h/R2 que considera la profundidad del canal, (9) describe el equilibrio entre la fuerza centrífuga que actúa
hacia afuera y la presión radial en la dirección opuesta, (10) debe complementarse con las
condiciones de frontera localizadas en r=η, 1, como se muestra en (11)-(12). Respecto a la
base aislante (pared de Hartmann) y la superficie libre del canal localizados en
z=0, 1, respectivamente se obtienen (13)-(14).
uθ2r=∂p∂r
(9)
∂2uθ∂r2+1r∂uθ∂r-uθr2+1ε2∂2uθ∂z2-1rlnη=0
(10)
uθr,zr=1=0
(11)
uθr,zr=η=0
(12)
∂uθr, z∂zz=1=0
(13)
uθr,zz=0=0
(14)
La solución de (10) a partir de las
condiciones de frontera (11)-(14), se expande en (15)-(17), donde J1αmr y αmr son las soluciones de la ecuación de Bessel, y αm corresponde a los valores propios (eigenvalues) que
satisfacen las condiciones de frontera (11)-(12), mientras que
los valores propios (eigenvalues) (17) satisface las condiciones de frontera (13)-(14).
vθ= ∑n=1N ∑m=1MAmnfmrgnz=∑n=1N∑m=1MAmnv1,mrgnz
(15)
v1,m=J1αmr+AmY1αmr
(16)
gnz=Bnsin2n-12πz
(17)
Las condiciones de frontera (11)-(12) se pueden rescribir en la forma de
(18), mientras que las ecuaciones (15)-(17), son sustituidas en (10), después los residuos se hacen
ortogonales a las funciones básicas de prueba. Tomando la aproximación (19) y formando el residuo (20) se obtiene (21).
J1αmY1αmJ1αmηY1αmη=0
(18)
Lvθ≈1rlnη
(19)
Rvθ=Lvθ-1rlnη
(20)
Lvθ=∂2vθ∂r2+1r∂vθ∂r-vθr2+1ε2∂2vθ∂z2
(21)
Aplicando las propiedades de las funciones empleadas en la expansión y realizando la
proyección del residuo sobre cada función propia (eigenfunction)
igual a cero, el coeficiente de la expansión está dado por (22). Mientras que el caudal no
adimensional (23) toma la forma
expresada en (24).
Akl=2αkαk2+λl2ε2SkTllnηv0;k1-v0;kηλl
(22)
q=∫-1/21/2 ∫η1vθdrdz
(23)
q=-∑mM∑nN4αm2αm2+λn2ε2SmTnlnηv0;m1-v0;mη2λn2
(24)
El caudal se hace adimensional a través de la cantidad Qc cuya expresión explícita se da en (25). Como en los experimentos, la corriente eléctrica aplicada I es un parámetro de control, es útil expresar los resultados en términos
de esta cantidad. Entonces, la definición de la velocidad característica toma la
forma de (26). Consecuentemente, la
velocidad característica promedio, que es útil para comparar los datos
experimentales se expresa por (27)
después de dividir la velocidad de flujo por el área de la sección transversal del
canal. La condición de frontera antideslizante (non-slip boundary)
se aplica a las superficies de los cilindros. Para la base aislante y la superficie
libre los valores propios (eigenvalues) de las funciones propias
(eigenfunctions) trigonométricas toman los valores limites λn→2n-1π/2. Los valores propios (eigenvalues) de las funciones de
Bessel se deben determinar para cada valor de η. Finalmente, el caudal adimensional está dado por (28), obteniendo una aproximación
casi-analítica de la velocidad del fluido (29) dónde vθ es la solución aproximada para la velocidad azimutal, αm es el m valor propio de Bessel (Bessel
eigenvalue), ε es la relación de aspecto h/R2, η es la relación entre los radios de los electrodos R1/R2, y gn es el n coeficiente de Galërkin, v0 es la velocidad inferior y v0 es la velocidad en la parte superior (superficie libre), para una
comprensión detallada del modelado (Valenzuela
et al., 2018b).
Qc=R22σh∆ϕB0μ=R22IB02πμlnη
(25)
Uc=R2 σh∆ϕB0μ=R2 IB0lnη2πhμ
(26)
U-AVG=R2 σ∆ϕB01-ημ=R2 IB021-ηhπμlnη
(27)
q=-∑m=1M ∑n=1N16αm2+2n-1π24ε2v1;m21-η2v1;m2ηlnηv0;m 1-v0;m η22n-1π2
(28)
vθ=∑m=1M ∑n=1N8-1n+1αmαm2+2n-1π24ε2v1;m21-η2v1;m2ηlnη v0;m 1-v0;m η2n-1πv1,mrgnz
(29)
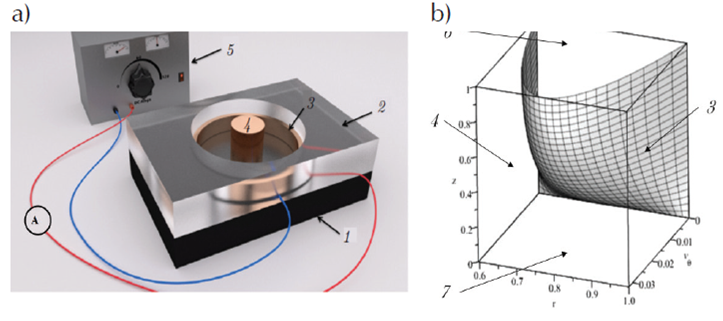
A través del modelado matemático se puede simular en tres dimensiones el
comportamiento del fluido en el canal abierto. Se puede experimentar con distintas
configuraciones donde varíe la profundidad del canal, la relación entre los radios
de los electrodos y las magnitudes de los campos magnéticos y eléctricos. En la
Figura 2a se muestra el mezclador MHD
propuesto, donde 1 es el imán permanente de neodimio; 2 es un contenedor de resina,
que contribuye con la base del canal, y donde se instalan los electrodos; 3 es el
electrodo exterior; 4 es el electrodo interior; 5 es la fuente de voltaje y A es un
amperímetro para medir la corriente que fluye a través de los electrodos. En la
Figura 2b se muestra la simulación (a
partir del modelado matemático) de un corte transversal del canal MHD propuesto: h=7 mm, η=0.60, y ε=0.22. Donde 3 es el electrodo exterior; 4 es el electrodo interior; 6 es la
superficie libre y 7 es la base del canal.
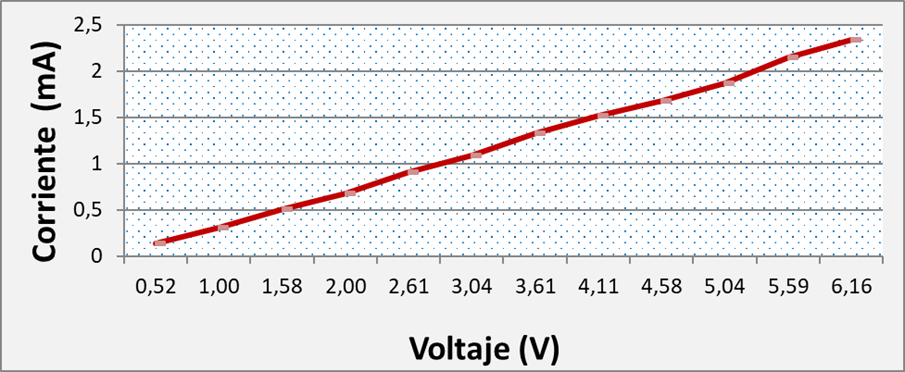
Para la selección de la composición de la solución micro-fluídica se analizaron cinco
configuraciones (Tabla 1) en busca de
aquellas soluciones que permitieran el flujo de corriente a través de dicha solución
con un comportamiento Voltaje-Corriente (V-I) lineal y con un comportamiento del
flujo en estado estable (no caótico, ni con presencia de vértices). Durante la
experimentación se observó que con una concentración de Bicarbonato de Sodio de 1 M
con o sin esferas de vidrio huecas recubiertas de plata (S-HGS, por sus siglas en
inglés), se obtenía un flujo caótico, mientras que con una concentración de
Bicarbonato de Sodio de 0.1 M el flujo era estable, pero los electrodos se oxidaban
y se generaban burbujas (Figura 3). También se
observó que al agregar esfera S-HGS a la solución aumentaba su conductividad y,
consecuentemente, la velocidad convirtiéndose en flujo turbulento, el cual no es una
característica de los micro-fluidos en general. De esta manera, se concluyó que la
mejor opción fue utilizar solo agua destilada con esferas S-HGS, ya que esta
solución provee de conductividad, de una relación lineal V-I (Figura 4) de un flujo estable y no se presentan problemas de
oxidación ni de burbujas. Se concluyó que el mejor rango de operación estaba
presente de 0.5V a 6V.
Tabla 1: Configuración de las soluciones conductoras
| Número de configuración |
Parámetros de la solución |
Campos magnético y eléctrico
inducidos (el campo eléctrico se expresa por la diferencia de
potencial que lo induce) |
| Agua destilada |
Bicarbonato de sodio NaHCO3
|
Esferas S-HGS |
B0
|
Δϕ,Voltaje directo
|
| 1 |
100 ml |
0.84 g |
None |
0.1624 T |
0.5 V≤Δϕ≤10. V
|
| 2 |
100 ml |
0.84 g |
0.1 g |
0.1624 T |
2 V≤Δϕ≤24 V
|
| 3 |
100 ml |
8.4 g |
None |
0.1624 T |
0.5 V≤Δϕ≤5 V
|
| 4 |
100 ml |
8.4 g |
0.1 g |
0.1624 T |
0.5 V≤Δϕ≤8 V
|
| 5 |
100 ml |
None |
0.1 g |
0.1624 T |
0.5 V≤Δϕ≤6 V
|
Validación teórica y experimental del mezclador magnetohidrodinámico
Para la validación teórica del modelado matemático del mezclador MHD propuesto se
realizó una investigación de los antecedentes y del estado del arte. La mayoría de
los modelados asumían que la profundidad del canal h era infinita y, por lo tanto, la relación de aspecto ε también tendía al infinito (Qin &
Bau, 2012). Solo se encontraron los resultados de tres prototipos con la
configuración de canal anular abierto (Digilov,
2007; West, 2003; Qin & Bau, 2012), pero de distintas
dimensiones a las propuestas. Estos modelados no proveen la simulación del flujo en
tres dimensiones, pero sí la máxima velocidad del perfil de velocidad en dos
dimensiones, es decir, visto sobre el plano de la superficie libre del canal anular.
Los parámetros de los dos prototipos encontrados en el estado del arte se alimentaron
en el modelado del mezclador MHD propuesto, a fin de comparar los resultados y
validar teóricamente el modelado planteado.
En (Digilov, 2007) se consideró un canal con
una profundidad h=18 mm, radio interior R1=1.5 mm, radio exterior R2 =24 mm, con relaciones η=0.0625 y ε=0.75. Se utilizó una solución acuosa de CuSO4 a 2 %, con una
conductividad σ=0.75 Sm-1, se indujo un campo magnético B0=20m T, con un número de Hartmann Ha=0.01 y una fuente de voltaje dc variable 0.5 V≤ϕ≤3.0 V. La velocidad de flujo se modeló por una solución analítica en un
análisis de dos dimensiones, obteniendo la distribución radial del vector de
velocidad azimutal mediante (30). Se
concluyó que para cualquier geometría de canal dada, la velocidad es proporcional al
voltaje aplicado. En la Tabla 2 se realizó
una validación de este modelado vs el desarrollado para el
mezclador MHD propuesto, donde se observa una variación de 0.12 a 0.72 cm/s entre
los dos modelos.
Tabla 2: Validación del modelado del mezclador MHD propuesto
vs modelado propuesto en Digilov (2007)
| Voltaje |
Velocidad máxima en cm/s por Digilov (2007)
|
Velocidad máxima en cm/s por Valenzuela et
al. (2018b)
|
Valor absoluto de la diferencia de resultados en
cm/s |
| 0.5 |
1.11 |
0.99 |
0.12 |
| 1.0 |
2.22 |
1.98 |
0.24 |
| 1.5 |
3.34 |
2.98 |
0.36 |
| 2.0 |
4.45 |
3.97 |
0.48 |
| 2.5 |
5.56 |
4.96 |
0.6 |
| 3.0 |
6.67 |
5.95 |
0.72 |
vθr=σϕB02v ln1ηrlnR2r+ln1η1η2-11-R2r2
(30)
Por otra parte, West (2003) utilizó el Método
de Elemento Finito (FEM, de sus siglas en inglés) para estimar el perfil de
velocidad en 2 dimensiones. Su experimentación se ejecutó en un anular con una
profundidad h=500 μm, con Radio interior R1=4 mm, con radio exterior R2 =6 mm, con relaciones η=0.667 y ε=0.083.
Se utilizó una solución acuosa dopada con KCl con una concentración 1M y se agregaron
20 partículas que le otorgaron una viscosidad v=0.9 x 10-3 kg m-1 s-1 al fluido. Se indujo un campo magnético B0=6.6 m T, y un campo eléctrico con una señal ac con parámetros IRMS=85.5 mA, VRMS=6.5V, f=1kHz. En la Tabla 3 se realizó la
validación de este modelado vs el propuesto, desarrollado para el
mezclador MHD, donde se observó una variación de 0.002 mm/s ente los dos
modelos.
Tabla 3: Validación del modelado del mezclador MHD propuesto
vs modelado propuesto en West (2003)
Finalmente, se realizó una comparación con los resultados de Zhong et al. (2002), donde se reportan varios
experimentos realizados con canales de forma anular (toroidal) y rectangular.
También con distintas soluciones, entre ellas agua desionizada y soluciones salinas,
así como el uso de dos magnitudes distintas de campo magnético.
La experimentación comparada es la de un canal anular con una profundidad h=700 μm, con radio interior R1=11 mm, con radio exterior R2 =12.4 mm, con relaciones η=0.887 y ε=0.0565 En la Tabla 4 se muestran los
resultados obtenidos al utilizar agua desionizada con una conductividad σ=2.2x10-4 S/m. En la Tabla 5 se muestran los
resultados obtenidos al utilizar una solución salina con una conductividad σ=2.2x10-3 S/m. En ambas experimentaciones se indujo un campo magnético B0=1.3 T, y una fuente de voltaje dc variable 0.5 V≤ϕ≤20.0 V, donde se observó una variación de 0.025 a 0.170 mm/s ente los dos
modelos.
Tabla 4: Validación del modelado del mezclador MHD propuesto
vs modelado propuesto en Zhong et al. (2002) con agua
de-ionizada
| Voltaje |
Velocidad máxima en mm/s por
Zhong et al.
(2002)
|
Velocidad máxima en mm/s por Valenzuela et
al. (2018b)
|
Valor absoluto de la diferencia de resultados en
mm/s |
| 5.0 |
0.120 |
0.145 |
0.025 |
| 10.0 |
0.230 |
0.290 |
0.060 |
| 15.0 |
0.345 |
0.440 |
0.095 |
| 20.0 |
0.460 |
0.582 |
0.122 |
Tabla 5: Validación del modelado del mezclador MHD propuesto
vs modelado propuesto en Zhong et al. (2002) con solución
salina
Respecto a la validación teórica, aunque las dimensiones de los prototipos simulados
en los tres modelados que se tomaron como punto de referencia no coinciden con las
del mezclador MHD propuesto, se concluyó que sí había una congruencia entre los
resultados de los cuatro modelados, ya que bajo las condiciones indicadas los
resultados de ambos modelos en comparación sí coincidían, además de que cada uno de
los tres modelados tomados como referencia para la comparación fueron
respectivamente validados experimentalmente por los investigadores que los
desarrollaron (Digilov, 2007; West, 2003; Zhong et al. 2002).
Para la validación experimental del modelado matemático del mezclador MHD propuesto
se desarrolló un sistema de visión, del cual se describen sus componentes,
configuración y la estimación de su incertidumbre en la siguiente sección.
Se partió de la preparación de las soluciones conductoras mostradas en la Tabla 1. Se prosiguió con el llenado del canal
anular hasta la profundidad definida h=7mm, se indujo la fuerza de Lorentz debido a la presencia del campo
magnético y del encendido de la fuente de voltaje directo. Se realizó la
caracterización eléctrica V-I de las distintas configuraciones de soluciones
conductoras mostradas en la Tabla 1 y se
observó el comportamiento del fluido. Para la configuración 1, no se observó
movimiento del fluido. En la configuración 2 se observó un flujo turbulento y la
generación de burbujas. Para las configuraciones 3 y 4 la conductividad era tan alta
que el flujo fue de alta velocidad y turbulento. Tras estos experimentos fue notorio
que al agregar las esferas S-HGS la conductividad aumentaba, por lo que se decidió
probar la configuración 5, que mostró un flujo estable, sin burbujas ni problemas de
oxidación, y con una relación V-I lineal como se muestra en la Figura 4. Después se procedio a la validación experimental
preliminar, donde se compararon las predicciones del modelo matemático contra las
lecturas obtenidas a traves del sistema de visión diseñado para analizar el
mezclador MHD, como se muestra en la Figura 5 y
se describe en la Tabla 6. Donde se obtuvo
una variación máxima de 0.00060 m/s.
Tabla 6: Validación del modelado del mezclador MHD propuesto
vs mediciones experimentales
| Voltaje (V) / Corriente (mA) |
Velocidad máxima en m/s por Valenzuela et al.
(2018b)
|
Velocidad máxima en m/s Medidas en el sistema de
visión |
Valor absoluto de la diferencia de resultados en
m/s |
| 0.5 / 0.140 |
0.00023 |
0.00040 |
0.00017 |
| 1.0 / 0.300 |
0.00058 |
0.00049 |
0.00009 |
| 1.5 / 0.500 |
0.00095 |
0.00075 |
0.00020 |
| 2.0 / 0.680 |
0.00130 |
0.00131 |
0.00001 |
| 2.5 / 0.900 |
0.00170 |
0.00173 |
0.00003 |
| 3.0 / 1.087 |
0.00208 |
0.00220 |
0.00012 |
| 3.5 / 1.330 |
0.00250 |
0.00255 |
0.00005 |
| 4.0 / 1.510 |
0.00300 |
0.00290 |
0.00010 |
| 4.5 / 1.680 |
0.00320 |
0.00322 |
0.00002 |
| 5.0 / 1.870 |
0.00350 |
0.00350 |
0.00000 |
| 5.5 / 2.15 |
0.00400 |
0.00370 |
0.00030 |
| 6.0 / 2.34 |
0.00450 |
0.00390 |
0.00060 |
Estimación de incertidumbre del sistema de visión
La medición del comportamiento del micro-fluido en un mezclador MHD es una fuente de
información indispensable para analizar la forma del diseño, las dimensiones del
canal y la caracterización del funcionamiento de dicho mezclador MHD. Además, se
requiere experimentar con los efectos de la variación de intensidad de campos
magnético y eléctrico inducidos en el micro-fluido, así como con la conductividad
del micro-fluido.
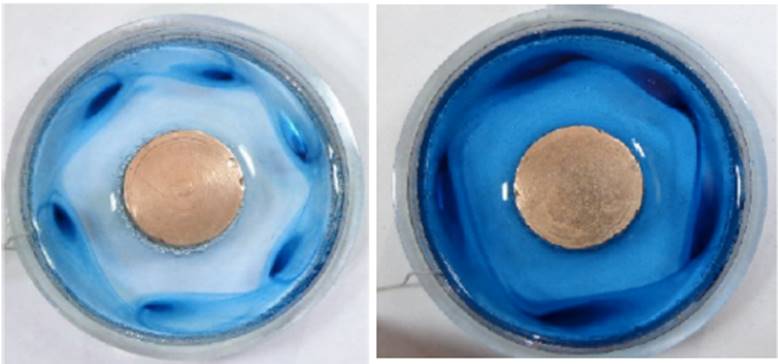
En previas experimentaciones, se recurrió al análisis visual del flujo usando tinte
para revelar su comportamiento (Pérez et
al., 2015). Sin embargo, a través de esta examinación solo
se lograba identificar los vórtices y su tiempo de permanencia cuando el flujo era
turbulento, debido a un cambio brusco de voltaje (Figura 6). Se sabe que los sistemas de visión permiten modelar el
comportamiento de micro-fluidos en sistemas mecánicos manipulados por MHD a través
del trazado de partículas (Kavitha &
Sathiaseelan, 2017), por tal razón, se procedió al diseño de un sistema
de visión con los requerimientos necesarios para poder medir el flujo en el
mezclador MHD propuesto. Con este propósito se inició una línea de investigación
para el diseño de un sistema de visión apoyado en el análisis de los campos de
velocidad presentes en un micro-fluido a partir del trazado de partículas, y a
través del procesamiento digital, basado en un análisis de velocimetría de
partículas en las imágenes (PIV, de sus singlas en inglés), cuya metodología de
diseño se describe en Valenzuela et
al. (2018a). A continuación se resumen brevemente sus
componentes y configuración para dar lugar al análisis de la estimación de su
incertidumbre.
En la Figura 7 se observan los siguientes
componentes del sistema de visión:
El mezclador MHD con canal anular.
Micro-fluido dopado con esferas S-HGS.
Fuente de corriente directa.
Imán.
Soporte para cámara de 25 cuadros por segundo (FPS, por sus siglas en
inglés), e iluminación basada en campo oscuro (Flores et al., 2017).
Sistema de cómputo con programa MATLAB y aplicación PIVLAB (Thielicke & Stamhuis, 2014).
A través de la aplicación PIVLAB, se realiza la carga de cuadros con la secuencia de
estilo x1-x2, x2-x3, …, xn-1-xn. Se selecciona la región de interés (ROI, de sus siglas en inglés), y se
aplica la máscara a todos los cuadros. Se pre-procesan las imágenes con el algoritmo
“contrast-limited adaptive histogram equalization (CLAHE)” con una ventana a tamaño
20 pixeles. Para el procesamiento se utilizó la transformada rápida de Fourier (FFT,
por sus siglas en inglés) con 4 ciclos de interrogación de áreas de 128, 64, 32 y 16
pixeles. Se utiliza interpolación lineal con una ventana de Gauss 2x3-puntos para la
estimación de sub-pixeles. El sistema se calibra con el diámetro interno del
mezclador MHD (37.52 mm) y con el intervalo de tiempo provisto por la cámara entre
cuadros (dt= 40 ms).
La cuantificación de la incertidumbre en sistemas de PIV aún es un campo de
experimentación en desarrollo, se han realizado algunas estimaciones a partir de
datos sintéticos, pero al evaluar dicha incertidumbre con datos reales se ha
observado que no han sido consideradas las fuentes de error presentes en el proceso
real de medición (Wieneke, 2015). En Timmins et al. (2012) se
establece la definición de incertidumbre de cualquier medición, como el intervalo en
el cual reside el error, y se detalla una metodología de medición de incertidumbre
en donde se concluye que para mediciones basadas en PIV el error de mediciones
depende de varios factores que varían en el dominio del espacio y del tiempo
produciendo un error no uniforme a través de las mediciones de todo el fluido. Entre
estos factores se encuentran el algoritmo PIV utilizado, las características del
micro-fluido, el diámetro de las partículas (esferas), la densidad de las
partículas, el patrón de desplazamiento de las partículas y su gradiente de
velocidad, así como de todos los parámetros utilizados en la configuración de la
experimentación.
Considerando estos antecedentes, se decide cuantificar la incertidumbre del sistema
de visión para las condiciones de la experimentación descrita en la Tabla 6.
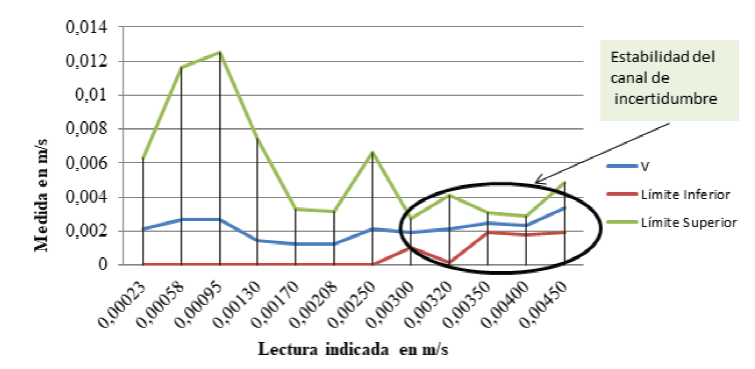
Para cada nivel de voltaje aplicado (de 0.5 V a 6.0 V) al mezclador MHD se le aplicó
la medición de 30 perfiles de velocidad distribuidos en 3 cuadrantes. Se estimó la
incertidumbre de medida U de acuerdo con (31) para
cada uno de estos niveles de voltaje a un nivel de confianza de 99 %, donde k=3 es
el factor de cobertura, debido a que los datos presentan una distribución normal y φ es la desviación estándar de la distribución de datos. De manera que la
estimación de medida M se define por (32), donde V es la media aritmética de los datos (Ramón, 2006). Se obtuvo la gráfica de calibración mostrada en la Figura 8 de acuerdo con los datos de la Tabla 7. Donde se puede observar que el canal
de incertidumbre para las mediciones se vuelve regular a partir de mediciones de
velocidad mayores a 0.003 m/s, para lo cual se estimó una incertidumbre de medición
de ±0.001152 m/s para perfiles de medición con comportamiento de velocidad estables,
a partir del promedio de las incertidumbres (U) obtenidas de las mediciones de los perfiles de velocidad con diferencias
de potencial de 4.0, 4.5, 5.0, 5.55, y 6.0 volts.
U=kφ
(31)
M=V±U
(32)
Tabla 7: Estimación de incertidumbre
| Perfil/Voltaje |
Magnitud de la máxima velocidad en
el perfil de medición [m/s] |
| 0.5 V |
1.0 V |
1.5 V |
2.0 V |
2.5 V |
3.0 V |
3.5 V |
4.0 V |
4.5 V |
5.0 V |
5.5 V |
6.0 V |
| 1 |
0.003023 |
0.001162 |
0.009114 |
0.000748 |
0.001580 |
0.001492 |
0.002402 |
0.002238 |
0.002276 |
0.002660 |
0.002300 |
0.003919 |
| 2 |
0.000739 |
0.001150 |
0.005671 |
0.001531 |
0.000595 |
0.000713 |
0.001401 |
0.001658 |
0.002271 |
0.002674 |
0.002006 |
0.003262 |
| 3 |
0.000634 |
0.001123 |
0.000750 |
0.000597 |
0.000764 |
0.000502 |
0.001365 |
0.002333 |
0.003768 |
0.002934 |
0.002228 |
0.003444 |
| 4 |
0.001313 |
0.000907 |
0.000992 |
0.000901 |
0.000910 |
0.001390 |
0.001617 |
0.001757 |
0.002081 |
0.002444 |
0.002522 |
0.003421 |
| 5 |
0.003096 |
0.000912 |
0.000937 |
0.000805 |
0.000827 |
0.003514 |
0.001381 |
0.002023 |
0.002168 |
0.002761 |
0.002787 |
0.002954 |
| 6 |
0.001699 |
0.003824 |
0.001100 |
0.001439 |
0.000798 |
0.001052 |
0.002704 |
0.001772 |
0.002168 |
0.002678 |
0.002282 |
0.002930 |
| 7 |
0.001610 |
0.001783 |
0.001292 |
0.000806 |
0.001359 |
0.001024 |
0.001519 |
0.001522 |
0.001986 |
0.002341 |
0.002465 |
0.003303 |
| 8 |
0.002019 |
0.000900 |
0.001309 |
0.000936 |
0.001320 |
0.000671 |
0.001323 |
0.001592 |
0.002129 |
0.002645 |
0.002268 |
0.003143 |
| 9 |
0.000944 |
0.001383 |
0.001474 |
0.001052 |
0.000990 |
0.001588 |
0.001322 |
0.001552 |
0.002042 |
0.002291 |
0.002308 |
0.003891 |
| 10 |
0.002341 |
0.001346 |
0.000990 |
0.001974 |
0.000785 |
0.000804 |
0.001338 |
0.001536 |
0.001725 |
0.002436 |
0.002585 |
0.003782 |
| 11 |
0.000960 |
0.004175 |
0.001292 |
0.001448 |
0.002541 |
0.001377 |
0.001448 |
0.001962 |
0.001998 |
0.002319 |
0.002405 |
0.003664 |
| 12 |
0.000631 |
0.000492 |
0.000440 |
0.000368 |
0.000717 |
0.000712 |
0.001179 |
0.001953 |
0.002047 |
0.002668 |
0.002322 |
0.001234 |
| 13 |
0.002917 |
0.001591 |
0.001537 |
0.000966 |
0.000694 |
0.001164 |
0.004536 |
0.001543 |
0.001956 |
0.002448 |
0.002384 |
0.003269 |
| 14 |
0.000978 |
0.005884 |
0.001733 |
0.000911 |
0.001842 |
0.001130 |
0.001703 |
0.001758 |
0.002011 |
0.002197 |
0.002522 |
0.003324 |
| 15 |
0.004228 |
0.010132 |
0.002497 |
0.000590 |
0.001088 |
0.001137 |
0.001744 |
0.001756 |
0.002011 |
0.002197 |
0.002315 |
0.003538 |
| 16 |
0.004580 |
0.001570 |
0.010406 |
0.000880 |
0.001432 |
0.001127 |
0.001664 |
0.001530 |
0.001767 |
0.002453 |
0.002475 |
0.003278 |
| 17 |
0.001016 |
0.001635 |
0.001567 |
0.001411 |
0.002668 |
0.001443 |
0.002176 |
0.002068 |
0.001774 |
0.002287 |
0.002491 |
0.003819 |
| 18 |
0.001693 |
0.003469 |
0.001368 |
0.001257 |
0.001678 |
0.002156 |
0.003114 |
0.001774 |
0.001912 |
0.002588 |
0.002359 |
0.003262 |
| 19 |
0.004580 |
0.002873 |
0.001634 |
0.008655 |
0.001888 |
0.001201 |
0.001734 |
0.002004 |
0.004054 |
0.002387 |
0.002363 |
0.003585 |
| 20 |
0.001955 |
0.011061 |
0.002347 |
0.000817 |
0.002069 |
0.001663 |
0.002115 |
0.001730 |
0.004054 |
0.002235 |
0.002243 |
0.003202 |
| 21 |
0.003010 |
0.001615 |
0.001548 |
0.001215 |
0.002149 |
0.002403 |
0.008598 |
0.001854 |
0.001902 |
0.002696 |
0.002191 |
0.004018 |
| 22 |
0.002548 |
0.000987 |
0.002151 |
0.001269 |
0.001298 |
0.001080 |
0.004475 |
0.001807 |
0.001447 |
0.002287 |
0.002398 |
0.003319 |
| 23 |
0.000563 |
0.000518 |
0.004816 |
0.000466 |
0.000646 |
0.000988 |
0.001052 |
0.002500 |
0.001777 |
0.002533 |
0.002035 |
0.003551 |
| 24 |
0.003970 |
0.010435 |
0.002302 |
0.008710 |
0.002811 |
0.001373 |
0.002676 |
0.002301 |
0.001836 |
0.002512 |
0.002843 |
0.003570 |
| 25 |
0.000876 |
0.000547 |
0.000762 |
0.000412 |
0.000552 |
0.001201 |
0.000987 |
0.001931 |
0.001543 |
0.002240 |
0.002382 |
0.003208 |
| 26 |
0.004301 |
0.000689 |
0.001205 |
0.000441 |
0.000606 |
0.000682 |
0.001333 |
0.001630 |
0.001847 |
0.002639 |
0.002220 |
0.003470 |
| 27 |
0.004217 |
0.001233 |
0.000815 |
0.000649 |
0.000617 |
0.000710 |
0.002527 |
0.002000 |
0.001677 |
0.002563 |
0.002176 |
0.003725 |
| 28 |
0.001009 |
0.000971 |
0.002103 |
0.000436 |
0.000574 |
0.000850 |
0.002237 |
0.002224 |
0.001712 |
0.002369 |
0.002152 |
0.003424 |
| 29 |
0.001926 |
0.004479 |
0.000684 |
0.000921 |
0.000512 |
0.000907 |
0.001016 |
0.002231 |
0.001757 |
0.002510 |
0.002362 |
0.003608 |
| 30 |
0.000407 |
0.000726 |
0.014632 |
0.000731 |
0.000923 |
0.000690 |
0.001209 |
0.002143 |
0.002100 |
0.002713 |
0.002174 |
0.003623 |
| V |
0.002126 |
0.002652 |
0.002649 |
0.001445 |
0.001241 |
0.001225 |
0.002130 |
0.001889 |
0.002127 |
0.002490 |
0.002352 |
0.003391 |
| σ |
0.0014000 |
0.0030000 |
0.0033000 |
0.0020000 |
0.0006830 |
0.0006510 |
0.0015000 |
0.0002750 |
0.0006650 |
0.0001950 |
0.0001870 |
0.0004890 |
| U |
0.004200 |
0.009000 |
0.009900 |
0.006000 |
0.002049 |
0.001953 |
0.004500 |
0.000825 |
0.001995 |
0.000585 |
0.000561 |
0.001467 |
| Límite Inferior |
0.000000 |
0.000000 |
0.000000 |
0.000000 |
0.000000 |
0.000000 |
0.000000 |
0.001064 |
0.000132 |
0.001905 |
0.001791 |
0.001924 |
| Límite
Superior |
0.006326 |
0.011652 |
0.012549 |
0.007445 |
0.003290 |
0.003178 |
0.006630 |
0.002714 |
0.004122 |
0.003075 |
0.002913 |
0.004858 |
Conclusiones
Existen estudios sobre flujos MHD en canales anulares con metales líquidos, pero
pocos trabajos han sido publicados en el caso de los electrolitos, asimismo no se
encontró registro en la literatura científica de que se hayan utilizado las esferas
S-HGS para proporcionarle conductividad al micro-fluido y solucionar problemas de
oxidación y burbujas propios del uso de electrolitos. En algunos de estos estudios
se menciona el comportamiento estable e inestable del micro-fluido y qué se requiere
para medir este fenómeno, sin embargo, en muchos de ellos no se ha realizado debido
a la falta de un sistema de medición.
En este artículo se resumen los fundamentos científicos para la aplicación de
micro-fluidos y MHD en sistemas mecánicos, se describe la configuración de un
mezclador MHD propuesto, el cual opera con un micro-fluido de baja conductividad
debido al dopado de esferas S-HGS en agua destilada, sin problemas de oxidación, ni
burbujas. Se evaluó el comportamiento del fluido en su etapa estable a través de la
simulación de las distintas configuraciones de mezcladores MHD encontrados en la
literatura científica. Se demostró la validez experimental del modelo matemático a
través de un sistema de visión desarrollado específicamente para la configuración
del mezclador MHD propuesto. Se realizó un análisis de incertidumbre y se entregó la
tabla de calibración del sistema de visión para la medición de la máxima velocidad
del fluido en su perfil de velocidad, donde se pudo observar que el canal de
incertidumbre para las mediciones se volvió regular a partir de mediciones de
velocidad mayores a 0.003 m/s. De esta manera se estimó una incertidumbre de
medición de ±0.001152 m/s para perfiles de medición con comportamiento de velocidad
estables, a partir del promedio de las incertidumbres (U) obtenidas de las mediciones de los perfiles de velocidad con
diferencias de potencial de 4.0, 4.5, 5.0, 5.55, y 6.0 volts. Este análisis de
incertidumbre permitirá tomar decisiones y controlar el sistema de medición para
avanzar a la medición del perfil de velocidad completo en 2D y posteriormente
replicar estas mediciones en n cantidad de planos para obtener el
perfil de velocidad en 3D, ya que como futuras actividades se prevé la necesidad de
validar no solo la máxima velocidad del perfil, sino el perfil completo para
posteriormente diseñar un mezclador MHD, que permita la penetración de hojas de
laser a fin de poder desarrollar un sistema de visión que pueda medir
simultáneamente varios planos a través de la profundidad del canal para recrear el
comportamiento del micro-fluido en 3 dimensiones.
Referencias
Al-Habahbeh, O. M., Al-Saqqa, M., Safi, M. & Abo-Khater, T.
(2016). Review of magnetohydrodynamic pump applications. Alexandria
Engineering Journal, 55(2), 1347-1358.
https://doi.org/10.1016/j.aej.2016.03.001Al
[ Links ]
Avila, K. M. (2011). The onset of turbulence in pipe flow.
Science, 333(6039), 192-196.
[ Links ]
Bau, H. H., Zu, J., Qian, S. & Xiang, Y. (2003). A
magneto-hydrodynamically controlled fluidic network. Sensors and
actuators B: Chemical, 88(2), 205-216.
https://doi.org/10.1016/S0925-4005(02)00325-8
[ Links ]
Bozkaya, C. (2017). Effect of boundary conditions on
magnetohydrodynamics duct flow. Journal of Coupled Systems and
Multiscale Dynamics, 5(2), 168-176.
[ Links ]
Das, C. W. (2013). Some practical applications of
magnetohydrodynamic pumping. Sensors and Actuators A: Physical,
201, 43-48.
[ Links ]
Davidson, P. (2001). An introduction to
magnetohydrodynamics. Cambridge Books Online.
[ Links ]
Digilov, R. M. (2007). Making a fluid rotate: Circular flow of a
weakly conducting fluid induced by a Lorentz body force. American
Journal of Physics, 75(4), 361-367. https://ui.adsabs.harvard.edu/link_gateway/2007AmJPh..75..361D/doi:10.1119/1.2372472
[ Links ]
Flores-Fuentes, W., Valenzuela-Delgado, M., Bravo-Zanoguera, M.,
López, M., Sergiyenko, O., Lindner, L., Ortiz-Pérez, A. S., Hernandez-Balbuena,
D. & Rodríguez-Quiñonez, J. (2017). Mechanical systems and microfluidics: The
application of a vision system in the testing of fluids behavior. En Kadry S.,
Mechanical Systems: Research, Applications and Technology (p. 305). Hauppauge,
NJ, USA: Nova Publisher.
[ Links ]
Jang, J. &. Lee S. (2000). Theoretical and experimental study of
MHD (magnetohydrodynamic) micropump. Sensors and Actuators A:
Physical , 80(1), 84-89.
https://doi.org/10.1016/S0924-4247(99)00302-7
[ Links ]
Jewett, J. W. (2009). Física para ciencias e ingeniería con
física moderna. Cengage Learning.
[ Links ]
Kavitha, C. & Sathiaseelan D. (2017). A new approach to spindle
radial error evaluation using a machine vision system. Metrology and
Measurement Systems, 24(1), 201-219.
https://doi.org/10.1515/mms-2017-0018
[ Links ]
Kumar, V. P. (2011). Ingle-phase fluid flow and mixing in
microchannels. Chemical Engineering Science, 66(7),
1329-1373.
[ Links ]
Lemoff, A. V. & Lee A. (2000). An AC magnetohydrodynamic
micropump. Sensors and actuators B: Chemical , 63(3), 178-185.
https://doi.org/10.1016/S0925-4005(00)00355-5
[ Links ]
Mahabaleshwar, U. S., Nagaraju, K. R., Vinay, P.N., Nadagoud, M. N.,
Bennacer, R. & Dumitru, B. (2020). An MHD viscous liquid stagnation point
flow and heat transfer with thermal radiation and transpiration. Thermal
Science and Engineering Progress, 16, 100379.
https://doi.org/10.1016/j.tsep.2019.100379
[ Links ]
Mitra, S. K. (2011). Microfluidics and Nanofluidics
Handbook: Chemistry, physics, and life science principles.
[ Links ]
Ortiz, A., Ángel, V., Acuña, A. & Vargas, L. E. (2017).
Magnetohydrodynamic flow with slippage in an annular duct for microfluidic
applications. Microfluidics and Nanofluidics, 21(8), 138.
https://doi.org/10.1007/s10404-017-1972-x
[ Links ]
Pérez-Barrera, J., Pérez-Espinoza, J. E., Ortiz, A., Ramos, E. &
Cuevas, S. (2015). Instability of electrolyte flow driven by an azimuthal
Lorentz force. Magnetohydrodynamics, 51(2), 203-213.
http://doi.org/10.22364/mhd
[ Links ]
Qin, M., & Bau, H. (2012). Magnetohydrodynamic flow of a binary
electrolyte in a concentric annulus. Physics of Fluids, 24(3),
037101. https://doi.org/10.1063/1.3689187
[ Links ]
Ramón-Pallas A. (2006). Instrumentos electrónicos
básicos. Barcelona: Marcombo S.A.
[ Links ]
Rashidi, S. E., Javad-Abolfazli, E. & Mahla, M. (2017).
Applications of magnetohydrodynamics in biological systems a review on the
numerical studies. Journal of Magnetism and Magnetic Materials,
439, 358-372. https://doi.org/10.1016/j.jmmm.2017.05.014
[ Links ]
Reynolds, O. (1883). An experimental investigation of the
circumstances which determine whether the motion of water shall be direct or
sinuous, and of the law of resistance in parallel channels.
Philosophical Transactions of the Royal society of London,
174, 935-982. https://doi.org/10.1098/rstl.1883.0029
[ Links ]
Thielicke, W. & Stamhuis, E. (2014). PIVlab-towards
user-friendly, affordable and accurate digital particle image velocimetry in
MATLAB. Journal of Open Research Software, 2(1).
http://doi.org/10.5334/jors.bl
[ Links ]
Timmins, B. H., Wilson, B., Smith, B. & Vlachos, P. (2012). A
method for automatic estimation of instantaneous local uncertainty in particle
image velocimetry measurements. Experiments in fluids, 53(4),
1133-1147. https://doi.org/10.1007/s00348-012-1341-1
[ Links ]
Valenzuela-Delgado, M., Flores-Fuentes, W., Bravo-Zanoguera, M.,
Ortiz-Pérez, A., Hernandez-Balbuena, D., Rivas-López, M., Sergiyenko, O. &
Gonzalez-Navarro, F. (2017). Machine vision system to measuring the velocity
field in a fluid by Particle Image Velocimetry: Special Case of
Magnetohydrodynamics. IEEE 26th International Symposium,
(1621-1625).
[ Links ]
Valenzuela-Delgado, M., Flores-Fuentes, W., Rivas-López, R.,
Sergiyenko, O., Lindner, L., Hernández-Balbuena, D. & Rodríguez-Quiñonez, J.
C. (2018a). Electrolyte magnetohydrondyamics flow sensing in an open annular
channel-A vision system for validation of the mathematical model.
Sensors, 18(6), 1683.
https://doi.org/10.3390/s18061683
[ Links ]
Valenzuela-Delgado, M., Ortiz-Pérez, A. S., Flores-Fuentes, W.,
Bravo-Zanoguera, M.E., Acuña-Ramírez, A., Ocampo-Díaz, J. D.,
Hernández-Balbuena, D., Rivas-López, M. & Sergiyenko O. (2018b). Theoretical
and experimental study of low conducting fluid MHD flow in an open annular
channel. International Journal of Heat and Mass Transfer, 127,
322-331. https://ma.x-mol.com/paperRedirect/786476
[ Links ]
West, J. G. (2003). Structuring laminar flows using annular
magnetohydrodynamic actuation. Sensors and actuators B:
Chemical , 96(1-2), 190-199. https://www.researchgate.net/deref/http%3A%2F%2Fdx.doi.org%2F10.1016%2FS0925-4005(03)00525-2
[ Links ]
Wieneke, B. (2015). PIV uncertainty quantification from correlation
statistics. Measurement Science and Technology, 26(7), 074002.
https://doi.org/10.1088/0957-0233%2F26%2F7%2F074002
[ Links ]
Yuan, F. & Kakkattukuzhy, M. (2014). A study of MHD-induced
mixing in microfluidics using CFD. Simulations, 6(3), 178-192.
https://doi.org/10.2174/187640290603150112123333
[ Links ]
Yuan, F. & Kakkattukuzhy, M. (2017). A study of MHD-based
chaotic advection to enhance mixing in microfluidics using transient three
dimensional CFD simulations. Sensors and actuators B: Chemical
, 238, 226-238. https://doi.org/10.1016/j.snb.2016.07.063
[ Links ]
Zhang, G. D. & Chen, C. (2020). Uniformly robust preconditioners
for incompressible MHD system. Journal of Computational and Applied
Mathematics, 112914.
https://doi.org/10.1016/j.cam.2020.112914
[ Links ]
Zhao, G. J., Jian, Y., Chang, L. & Buren, M. (2015).
Magnetohydrodynamic flow of generalized maxwell fluids in a rectangular
micropump under an AC electric field. Journal of Magnetism and Magnetic
Materials , 387, 111-117. https://ui.adsabs.harvard.edu/link_gateway/2015JMMM..387..111Z/doi:10.1016/j.jmmm.2015.03.094
[ Links ]
Zhong, J., Yi, M. & Bau, H. (2002). Magneto hydrodynamic (MHD)
pump fabricated with ceramic tapes. Sensors and Actuators A:
Physical , 96(1), 59-66.
https://doi.org/10.1016/S0924-4247%2801%2900764-6
[ Links ]
Nomenclatura
An = |
n coeficiente de Bessel Galërkin |
Bn = |
n coeficiente del coseno de Galërkin |
Amn = |
n-m coeficientes de Galërkin |
fn = |
n coeficiente de Galërkin |
gn = |
n coeficiente de Galërkin |
uθ = |
solución exacta de la velocidad azimutal |
vθ = |
aproximación de la velocidad azimutal |
F = |
fuerza de Lorentz |
v = |
velocidad de una partícula con carga eléctrica |
E = |
campo eléctrico |
q = |
carga eléctrica |
eθ = |
vector unitario azimutal |
er = |
vector unitario vertical |
h = |
profundidad del canal |
j = |
densidad de corriente adimensional |
B = |
campo magnético adimensional |
B0= |
campo magnético |
Ha = |
número de Hartmann |
Rm = |
número Magnético de Reynolds |
Re = |
número de Reynolds |
Uc = |
velocidad característica |
L = |
longitud característica |
U = |
incertidumbre |
k = |
coeficiente arbitrario para expresar la incertidumbre en términos de la
desviación estándar |
φ = |
desviación estándar |
M = |
el valor de una medición de velocidad |
αm = |
m valor propio de Bessel |
λn = |
n coseno valor propio |
η = |
relación de radios R1/R2
|
Δϕ = |
diferencia de potencial eléctrica (voltaje) |
ν = |
viscosidad cinemática |
ρ = |
densidad |
σ = |
conductividad eléctrica |
μ0 = |
permitividad magnética en el vacío |
r = |
radio, utilizado para definir las fronteras radiales (paredes del canal
anular) |
z= |
eje vertical, utilizado para definir las fronteras superior e inferior
(base aislante y superficie libre del canal anular) |












 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink