











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
Un puente peatonal es una estructura que permite el paso de las personas sobre vías de tránsito vehicular o cuerpos de agua, razón por la cual existe gran demanda de este tipo de estructuras. Los puentes peatonales deben ser capaces de soportar cargas muertas, vivas y accidentales, de tal manera que se satisfaga tanto el estado límite último como el de servicio. El constante crecimiento de las ciudades requiere cada vez de más infraestructura de transporte y particularmente de puentes peatonales, sin embargo, la nueva tendencia estética consiste en diseñar puentes peatonales más esbeltos y flexibles que son más propensos a las vibraciones inducidas por peatones.
En la Ciudad de México como en los estados de la República Mexicana, no existe una reglamentación de diseño estructural para puentes peatonales, lo cual genera que no exista una homogeneidad en los criterios de diseño a emplearse. Lo anterior es incongruente, ya que en las Normas Técnicas Complementarias de Diseño por sismo de la Ciudad de México (NTC, 2017) se clasifican los puentes peatonales como estructuras del Grupo A.
Generalmente, durante el proceso de diseño se considera el efecto del paso de los peatones por medio de una carga estática uniformemente distribuida del orden de 4900 N/m2 que representa el peso de los peatones sobre el tablero del puente y no se considera el efecto de la carga dinámica que produce el peatón durante su movimiento. Particularmente en la práctica ingenieril mexicana se ignora la revisión del estado límite de servicio de estas estructuras, lo cual ha ocasionado que muchos puentes peatonales presenten vibraciones excesivas que promueven el desuso de los mismos, incrementando así los accidentes por atropellamiento.
Las normas internacionales actuales para diseño de puentes peatonales proponen revisar el estado límite de servicio ante vibraciones inducidas por peatones, ya que estos generan frecuencias armónicas que pueden coincidir con alguna de las frecuencias estructurales, y por lo tanto provocar vibraciones resonantes que pueden exceder el nivel de confort soportado por el ser humano. Con el objetivo de evitar vibraciones resonantes, dichas normas recomiendan que los modos principales de vibración de los puentes peatonales estén fuera de los intervalos de frecuencia de paso típico de los peatones (Huergo, 2016).
Existen muchos parámetros que afectan la sensibilidad humana, tales como la posición en la que se encuentra la persona, la dirección de incidencia respecto a la columna vertebral, la actividad que se esté realizando, la edad, el sexo, etcétera. Para el caso de la vibración vertical puede tomarse como aceleración límite de confort un valor promedio de 0.7 m/s2. Las normas consideran que se satisface el estado límite de servicio cuando las aceleraciones verticales son menores a dicho valor.
La mayoría de las normas internacionales proponen fórmulas simplificadas para obtener la respuesta dinámica de los puentes peatonales ante el paso de los usuarios, sin embargo, estas no consideran el comportamiento dinámico de los peatones, las condiciones de apoyo del puente, ni la contribución de los modos superiores de vibración; razón por la cual es conveniente utilizar modelos matemáticos más completos para representar adecuadamente dichos efectos.
Criterios de confort
Las normas internacionales establecen que principalmente la condición que se debe evitar en el diseño de puentes peatonales es que las frecuencias de vibración de la estructura coincidan con las frecuencias de paso de la excitación peatonal; ya que esto podría generar la presencia de un acoplamiento dinámico similar al fenómeno de resonancia. Durante la etapa de diseño esto no siempre es posible de lograr, ya que las frecuencias de vibración de la estructura dependen en gran medida del claro del puente. Ante esta situación, las normas de diseño establecen que las aceleraciones inducidas por peatones no deben rebasar ciertos límites de confort establecidos en ellas. Las frecuencias críticas y aceleraciones límites de confort contempladas por algunas normas internacionales de diseño se muestran en la Tabla 1.
Tabla 1: Frecuencias estructurales críticas y límites de aceleración de confort (Huergo, 2016)
| Normas | Intervalo de frecuencias estructurales críticas (Hz) |
Límites de aceleración de confort (m/s2) |
||
| Vertical | Horizontal | Vertical | Horizontal | |
| Eurocódigo 0- Anexo 2 (EN 1990-Annex A2) | < 5.0 | < 2.5 | 0.7 | 0.2 (0.4) |
| Eurocódigo 1 (EN 1991) | < 5.0 | < 2.5 | min (0.5 f V,1 0.5, 0.7) | min (0.14 f H ,1 0.5, 0.15) |
| Eurocódigo 2 (ENV 1992-2) | 1.6 - 2.4 | 0.8 - 1.2 | ------- | ---------- |
| Eurocódigo 5 (ENV 1995-2) | < 5.0 | < 2.5 | 0.7 | 0.2 |
| RPX95, RPM95 (España) | ------- | ------- | 0.5 f V ,1 0.5 | ------- |
| EAE (España) | 1.6 - 2.4 3.5 - 4.5 | 0.6 - 1.2 | min (0.5 f V,1 0.5, 0.7) | 0.2 (0.4) |
| BS 5400 (Reino Unido) | < 5.0 | ------- | 0.5 f V,1 0.5 | ------- |
| Din-Fachberitch 102 (Alemania) | 1.6 - 2.4 3.5 - 4.5 | ------- | 0.5 f V ,1 0.5 | ------- |
| SIA 260 (Suiza) | 1.6 - 4.5 | < 1.3 | ------- | ------- |
| AASHTO 1997 (USA) | < 3 | ------- | ------- | ------- |
| ONT83 (Canadá) | ------- | ------- | 0.25 f V ,1 0.39 | ------- |
| Austroads (Australia) | 1.5 - 3 | ------- | ------- | ------- |
| Norma japonesa de puentes peatonales | 1.5 - 2.3 | ------- | 1 | ------- |
| ISO 10137 (2007) | 1.7 - 2.3 | ------- | 60x (Curva base ISO 2631-2) | ------- |
| HIVOSS (2008) | 1.25 - 2.3 | 0.5 - 1.2 | 0.5 | 0.1 |
| CEB 209 Bulletin | 1.65 - 2.35 | 0.8 - 1.2 | ------- | ------- |
| VDI 2057 | ------- | ------- | 0.6 f V,1 | 0.214 |
| AISC Guide 11 | ------- | ------- | 100x (Curva base ISO 2631-2) | ------- |
En la Tabla 1, f V,1 es la frecuencia de vibración del modo 1 del puente peatonal en la dirección vertical y f H,1 es la frecuencia de vibración del modo 1 del puente peatonal en la dirección horizontal. Las normas de diseño internacionales sugieren que las frecuencias críticas en la dirección longitudinal pueden tomarse igual a las de la dirección vertical. El límite de aceleración vertical y longitudinal establecido por las normas puede tomarse igual a 0.7 m/s2, mientras que para la dirección horizontal puede tomarse igual a 0.2 m/s2.
Modelo de carga peatonal
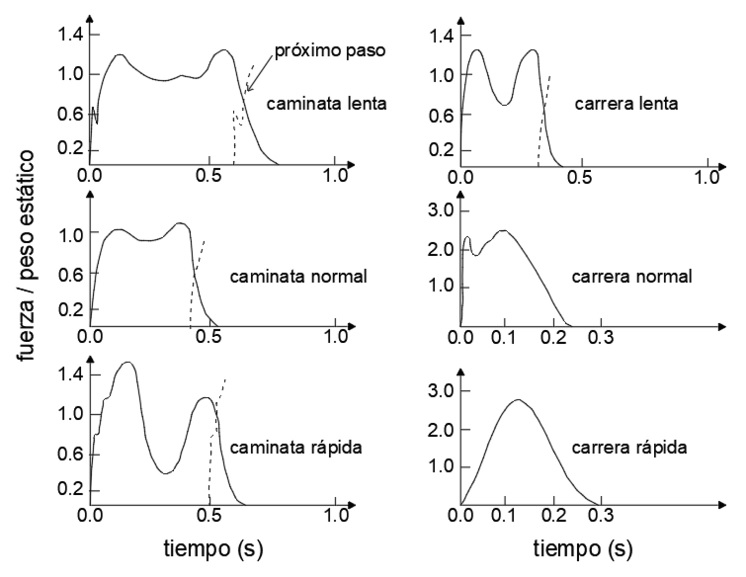
Los movimientos rítmicos del cuerpo humano con una duración de hasta 20 s o más, conllevan a fuerzas dinámicas casi periódicas. En la Figura 1 se muestran los patrones típicos de fuerza peatonal en la dirección vertical (Wheeler, 1982).
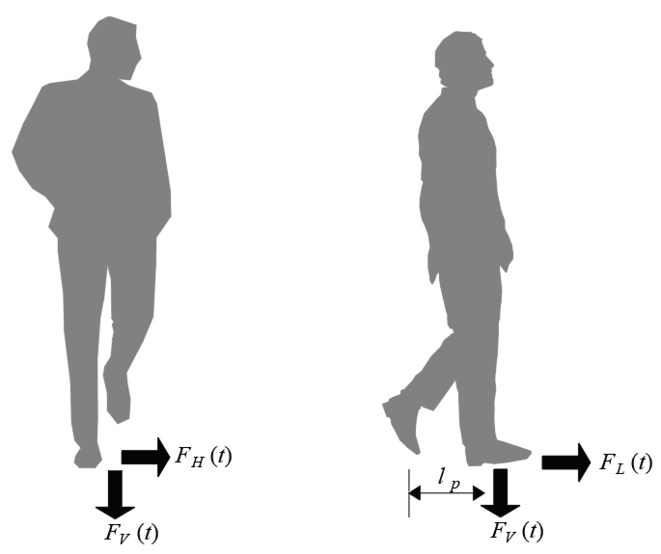
En la mayoría de los casos, la vibración en puentes peatonales se trata de un problema de vibración forzada causada por el paso de los peatones sobre estas estructuras. La fuerza dinámica ejercida por un peatón puede descomponerse en tres componentes ortogonales (Figura 2): fuerza vertical, F V (t), fuerza horizontal, F H (t), y fuerza longitudinal, F L (t).
La excitación dinámica que produce un peatón a un ritmo de caminata normal tiene una frecuencia vertical de vibración de 2 Hz con una desviación estándar de 0.175 Hz. Esto significa que 95 % de los peatones caminan con frecuencias verticales de vibración de entre 1.65 Hz y 2.35 Hz. En ocasiones los peatones suelen correr sobre estas estructuras ejerciendo frecuencias verticales de vibración de hasta 3.5 Hz, pero usualmente no más allá de dicho valor. En la Tabla 2 se muestran las velocidades y frecuencias más probables a ser desarrolladas por los peatones.
Tabla 2: Velocidades y frecuencias de paso ejercidas por un peatón (Bachmann et al., 1995)
| Actividad peatonal | Velocidad (m/s) | Frecuencia peatonal | ||
| Vertical (Hz) | Horizontal (Hz) | Longitudinal (Hz) | ||
| Caminata lenta | 1.1 | 1.7 | 0.85 | 1.7 |
| Caminata normal | 1.5 | 2.0 | 1.0 | 2.0 |
| Caminata rápida | 2.2 | 2.3 | 1.15 | 2.3 |
| Carrera lenta | 2.5 | 2.1 | 1.05 | 2.1 |
| Carrera normal | 3.3 | 2.5 | 1.25 | 2.5 |
| Carrera rápida | 5.5 | 3.2 | 1.6 | 3.2 |
Las componentes ortogonales de fuerza peatonal (Figura 2) pueden representarse mediante series de Fourier debido a su naturaleza periódica, de tal manera que:
Donde:
y donde:
f V , f H y f L = |
frecuencias de paso ejercidas por los peatones en Hz para la dirección vertical, horizontal y longitudinal, respectivamente (Tabla 2) |
α i,V , α i,H y α i,L = |
coeficientes de Fourier del i-ésimo armónico para la dirección vertical, horizontal y longitudinal, respectivamente |
n = |
número total de contribuciones armónicas |
t = |
tiempo |
φ i = |
ángulo de fase en radianes del i-ésimo armónico |
n p = |
número total de peatones que conforman la carga |
G = |
peso promedio de un peatón (G ≈ 700 N) |
n eff = |
número efectivo de peatones |
ψ = |
coeficiente de reducción de la carga peatonal |
Los coeficientes de Fourier y ángulos de fase correspondientes se muestran en la Tabla 3.
Tabla 3: Coeficientes de Fourier y ángulos de fase (Bachmann et al., 1995)
| Actividad peatonal | Frecuencia peatonal | Primer armónico | Segundo armónico | Tercer armónico | np/m2 | ||||
| α1 | φ1 | α2 | φ2 | α3 | φ3 | ||||
| Caminata | Vertical | 2.0 / 2.4 Hz | 0.40/0.5 | 0.0 | 0.10 | π/2 | 0.10 | π/2 | ~1 |
| Horizontal | 1.0 Hz | 0.10 | 0.0 | 0.10 | π/2 | 0.10 | π/2 | ||
| Longitudinal | 2.0 Hz | 0.20 | 0.0 | 0.10 | - | - | - | ||
| Carrera | 2.0 a 3.0 Hz | 1.60 | 0.0 | 0.70 | - | 0.20 | - | - | |
El número efectivo de peatones puede interpretarse como un factor de sincronización y se calcula con base en el supuesto probabilístico de que el número de peatones que camina en sintonía con la frecuencia natural de vibración del puente produce 95 % de la aceleración pico debido a corrientes de peatones aleatorias. El número efectivo de peatones se puede obtener de la Tabla 4, recomendándose usar las expresiones propuestas por las normas Sétra (2006) e HIVOSS (2008).
Tabla 4: Número efectivo de peatones
| Norma de diseño | np/m2 | neff |
| (ISO 10137, 2007) | - |
|
| (Sétra, 2006) (HIVOSS, 2008) | <1.0 |
|
| ≥ 1.0 |
|
El valor de ξ en la Tabla 4 es la fracción de amortiguamiento crítico del puente peatonal, la cual puede obtenerse de la Tabla 5.
Tabla 5: Valores comunes de amortiguamiento estructural para puentes peatonales
| Tipo de construcción | ξ | |||||
| (Bachmann et al., 1995) | (Sétra, 2006) | (HIVOSS, 2008) | ||||
| Mínimo | Medio | Mínimo | Medio | Mínimo | Medio | |
| Concreto reforzado | 0.008 | 0.013 | 0.008 | 0.013 | 0.008 | 0.013 |
| Concreto pretensado | 0.005 | 0.010 | 0.005 | 0.010 | 0.005 | 0.010 |
| Acero | 0.002 | 0.004 | 0.002 | 0.004 | 0.002 | 0.004 |
| Compuesto (concreto-acero) | 0.003 | 0.006 | 0.003 | 0.006 | 0.003 | 0.006 |
| Madera | - | - | 0.015 | 0.030 | 0.010 | 0.015 |
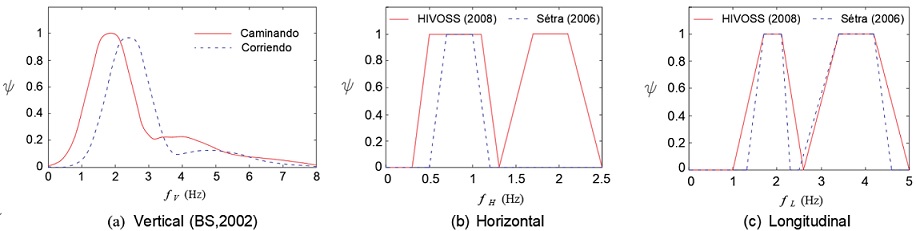
El coeficiente de reducción de la carga peatonal representa la probabilidad de ocurrencia de las frecuencias de paso de los peatones (Figura 3).
El número total de peatones a utilizar en las ecuaciones (1) a (3) depende del uso del puente peatonal, para lo cual pueden utilizarse los casos de carga mostrados en la Tabla 6.
Tabla 6: Clasificación de puentes peatonales (BS, 2002)
| Clase de puente | Uso de puente | np | |
| Caminando | Corriendo | ||
| A | Localidades rurales poco pobladas | 2 | 0 |
| B | Ubicación suburbana sujeta
a poca variación en el uso diario |
4 | 1 |
| C | Rutas urbanas sujetas a
variación importante en el uso diario |
8 | 2 |
| D | Accesos primarios a estadios deportivos o grandes servicios de transporte público |
16 | 4 |
Viga Euler-Bernoulli con amortiguadores de masa sintonizada
Los puentes peatonales suelen ser más susceptibles de vibraciones resonantes en la dirección vertical en comparación con las vibraciones inducidas por peatones en la dirección horizontal y longitudinal. Una de las medidas más económicas y efectivas para controlar las vibraciones verticales resonantes en puentes peatonales es la utilización de amortiguadores de masa sintonizada. Un amortiguador de masa sintonizada (AMS) es un sistema oscilatorio secundario, habitualmente compuesto por una masa conectada a la estructura principal a través de resortes. Estos dispositivos se sintonizan con la frecuencia estructural del modo de vibración que se desea controlar y deben situarse en los puntos de máxima amplitud modal de dicho modo de vibración; su rendimiento en resonancia es elevado y requieren poco mantenimiento.
Los puentes peatonales son estructuras esbeltas cuyo comportamiento dinámico es principalmente a flexión vertical, por lo que pueden representarse como vigas continuas Euler-Bernoulli. Para plantear la ecuación diferencial de movimiento es necesario tomar en cuenta las siguientes hipótesis: el puente peatonal tiene su masa y sección transversal constantes en toda su longitud; la masa de los peatones es pequeña en comparación con la masa del puente peatonal, esto significa que solo son representativos los efectos gravitacionales de la carga peatonal; los peatones se mueven a una velocidad constante desde el extremo izquierdo del puente hacia el extremo derecho del puente; el amortiguamiento del puente peatonal es proporcional a la velocidad de su vibración; y el puente peatonal está en reposo antes de que la carga peatonal cruce sobre este, de tal manera que no posee deflexión ni velocidad antes de la llegada de la carga peatonal. Todas estas hipótesis suelen cumplirse en la mayoría de los puentes peatonales, razón por la cual pueden modelarse como una viga continua Euler-Bernoulli. Un puente peatonal simplemente apoyado con sección transversal constante y con un AMS sujeto a una carga peatonal vertical móvil, puede modelarse como se muestra en la Figura 4.
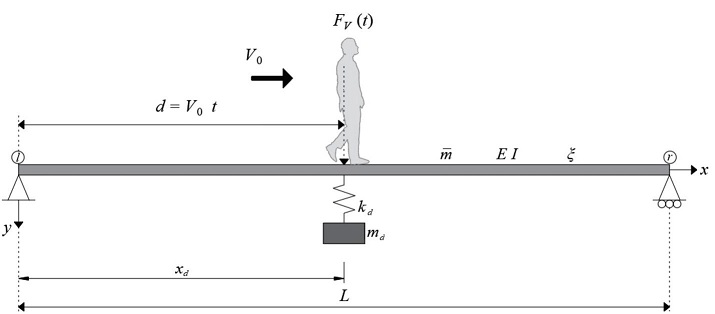
Figura 4: Viga continua Euler-Bernoulli simplemente apoyada con un AMS sujeta a una carga peatonal vertical móvil
En la Figura 4:
|
masa por unidad de longitud de la viga |
E = |
módulo de elasticidad de la viga |
I = |
segundo momento de área de la sección transversal de la viga alrededor del eje z |
ξ= |
fracción de amortiguamiento crítico del puente peatonal |
t = |
tiempo |
V 0 = |
velocidad constante a la que se desplaza la carga peatonal |
F V (t) = |
fuerza dinámica peatonal mostrada en la ecuación (1) |
l = |
el apoyo izquierdo del puente peatonal |
r = |
apoyo derecho del puente peatonal |
m d = |
masa del AMS |
k d = |
rigidez del AMS |
x d = |
distancia existente entre el apoyo izquierdo del puente peatonal y el AMS |
L = |
longitud total del puente peatonal |
Con base en el trabajo de Huergo (2016), la ecuación diferencial de movimiento asociada al modelo de la Figura 4 es:
Donde:
y(x,t) = |
desplazamiento dinámico vertical de la viga |
w i = |
i-ésima frecuencia circular de vibración de la viga |
δ(x-V0 t) = |
función de Dirac que representa matemáticamente cómo se mueve la carga peatonal vertical F V (t). |
La solución elástica de la ecuación (6) se obtiene al aplicar el método de separación de variables, de tal manera que:
Donde:
Donde:
ϕ i (x) = |
amplitud modal del i-ésimo modo de vibración de la viga con un AMS |
ϕ AMS = |
amplitud modal del AMS |
q i (t) = |
desplazamiento generalizado del i-ésimo modo de vibración de la viga con un AMS, el cual se obtiene al resolver la integral de Duhamel mostrada en la ecuación (8) |
|
carga generalizada del i-ésimo modo de vibración de la viga con un AMS |
w(i,d) = |
la i-ésima frecuencia circular amortiguada de la viga con un AMS |
τ = |
tiempo de duración de un impulso unitario |
Wu y Chou (1999) propusieron una metodología
para el cálculo de las frecuencias y modos de vibración de vigas continuas
Euler-Bernoulli con múltiples amortiguadores de masa sintonizada y con diferentes
condiciones de apoyo: viga simplemente apoyada, viga con doble empotramiento, viga
empotrada en un extremo y con apoyo simple en el otro extremo, y viga en voladizo.
El método propuesto por Wu y Chou (1999)
plantea un sistema con 5n+4 ecuaciones
Donde:
y donde [B l ] y [B r ] son respectivamente las matrices de coeficientes para los apoyos izquierdo y derecho del puente peatonal. Las matrices [B l ] y [B r ] se muestran en la Tabla 7 para diferentes condiciones de apoyo.
Tabla 7: Matrices [Bl] y [Br] para diferentes condiciones de apoyo (Wu y Chou, 1999)
| Condiciones de apoyo | [Bl] | [Br] | |
| x = 0 | x = L | ||
| Simple | Simple |
|
|
| Empotrado | Empotrado |
|
|
| Empotrado | Simple |
|
|
| Empotrado | Libre |
|
|
Con base en la metodología de Wu y Chou (1999), el i-ésimo modo de vibración vertical de la viga con un AMS (Figura 4) está dado por:
La i-ésima frecuencia de vibración vertical en Hz del puente peatonal con un AMS está dada por:
Los parámetros óptimos del AMS se obtienen mediante la teoría desarrollada por Den Hartog (1956) por las ecuaciones:
|
frecuencia de vibración en Hz del AMS |
|
frecuencia fundamental vertical de vibración del puente peatonal sin AMS |
m(d,) , kd , cd y ξd = |
respectivamente la masa, rigidez, coeficiente de amortiguamiento y fracción de amortiguamiento crítico del AMS |
|
masa modal efectiva del primer modo de vibración del puente peatonal sin AMS |
|
primer modo de vibración vertical del puente peatonal sin AMS |
|
amplitud modal en el punto de anclaje del AMS del primer modo de vibración vertical del puente peatonal sin AMS |
|
masa por unidad de longitud del puente peatonal |
ξe = |
fracción de amortiguamiento crítico equivalente del puente peatonal con un AMS |
El i-ésimo modo de vibrar del puente peatonal sin AMS está dado por:
donde Ai , Bi , Ci y Di son las constantes de integración que conforman el vector característico, y donde αi es el valor característico asociado a dicho vector característico. Las constantes de integración y el valor característico dependen de las condiciones de frontera de la viga y pueden obtenerse mediante las Tablas 8 y 9, respectivamente.
Tabla 8: Constantes de integración para diferentes condiciones de frontera de una viga sin AMS (Huergo, 2016)
| Condiciones de apoyo | Constantes de integración | ||||
| x = 0 | x = L | Ai | Bi | Ci | Di |
| Simple | Simple | 1.0 | 0.0 |
|
0.0 |
| Empotrado | Empotrado | 1.0 |
|
-1.0 |
|
| Empotrado | Simple | 1.0 |
|
-1.0 |
|
| Empotrado | Libre | 1.0 |
|
-1.0 |
|
Tabla 9: Valores característicos para diferentes condiciones de frontera de una viga sin AMS (Gonçalves et al., 2007)
| i | ai | |||||||
| x= 0 | x= L | x= 0 | x= L | x= 0 | x= L | x= 0 | x= L | |
| Apoyo simple |
Apoyo simple |
Apoyo empotrado |
Apoyo empotrado |
Apoyo empotrado |
Apoyo simple |
Apoyo empotrado |
Apoyo libre |
|
| 1 | π | 4.73004 | 3.92660 | 1.87510 | ||||
| 2 | 2 π | 7.85320 | 7.06858 | 4.69409 | ||||
| 3 | 3 π | 10.9956 | 10.2102 | 7.85476 | ||||
| 4 | 4 π | 14.1372 | 13.3518 | 10.9955 | ||||
| 5 | 5 π | 17.2788 | 16.4934 | 14.1372 | ||||
| 6, 7,… ,∞ | i π | (2 i+1) π/2 | (4 i+1) π/4 | (2 i-1) π/2 | ||||
La i-ésima frecuencia vertical en Hz del puente peatonal sin AMS está dada por:
Para garantizar una solución aceptable en la ecuación (6) se debe de considerar un número de modos de vibración suficiente para garantizar que por lo menos participa 9% de la masa en la respuesta dinámica. La masa modal efectiva del i-ésimo modo de vibrar del puente peatonal con un AMS está dada por:
Resultados
Se estudiaron tres puentes peatonales denominados en este trabajo como puente 1, 2 y 3 (Figura 5); esto con el objetivo de aplicar la metodología desarrollada en este trabajo y diseñar un sistema de control pasivo que logre mitigar las vibraciones verticales inducidas por peatones en cada uno de los puentes. Los detalles de la estructuración, ubicación y modelo matemático de los puentes peatonales en estudio se pueden revisar en el trabajo de Huergo (2016).

El puente peatonal 1 tiene un solo claro de 24 m y posee dos apoyos simples. El puente peatonal 2 tiene dos claros de 24 m, dos apoyos extremos empotrados y un apoyo central (arco) tipo simple; lo que permite estudiar cada claro de manera separada. El puente peatonal 3 tiene un solo claro de 36 m y posee dos apoyos empotrados. Las propiedades mecánicas de los 3 puentes peatonales se muestran en la Tabla 10.
Tabla 10: Propiedades mecánicas de los puentes peatonales estudiados
| Propiedad mecánica | Puente peatonal 1 | Puente peatonal 2 | Puente peatonal 3 |
| L (m) | 30 | 24 | 36 |
|
|
772.79 | 658.73 | 1,016.93 |
| E I (N m2) | 3,379,830,806 | 367,029,898 | 1,032,132,941 |
Se realizaron modelos numéricos en un software comercial y pruebas de vibración ambiental de los puentes peatonales para determinar sus propiedades dinámicas (Huergo, 2016). El amortiguamiento respecto al crítico resultó ser de 0.8 %, 0.37 % y 0.45 % para el puente peatonal 1, 2 y 3, respectivamente (Huergo, 2016). Se determinaron las frecuencias verticales de vibración de los puentes peatonales con la teoría descrita en la sección anterior, observándose que con siete modos de vibración se lograba una participación de la masa en la respuesta dinámica mayor a 90 %. Las propiedades dinámicas verticales obtenidas se muestran en la Tabla 11.
Tabla 11: Modos y frecuencias de vibración verticales de los puentes peatonales sin AMS
|
i-ésimo modo de vibrar |
Puente peatonal 1 | Puente peatonal 2 | Puente peatonal 3 | ||||||
|
fi (Hz) |
meff,i (%) |
(%) |
fi (Hz) |
meff,i (%) |
(%) |
fi (Hz) |
meff,i (%) |
(%) |
|
| 1 | 3.65 | 81.0564 | 81.0564 | 3.18 | 73.9601 | 73.9601 | 2.768 | 69.0331 | 69.0331 |
| 2 | 14.6 | 1.974 x 10-9 | 81.0564 | 10.3052 | 0.6828 | 74.6429 | 7.6301 | 9.5 x 10-14 | 69.0331 |
| 3 | 32.85 | 9.0058 | 90.0622 | 21.5012 | 11.1815 | 85.8244 | 14.9580 | 13.2328 | 82.2659 |
| 4 | 58.4 | 7.895 x 10-9 | 90.0622 | 36.7683 | 0.1925 | 86.0169 | 24.7265 | 9.89 x 10-13 | 82.2659 |
| 5 | 91.25 | 3.2417 | 93.3039 | 56.1066 | 4.2851 | 90.3020 | 36.9372 | 5.3591 | 87.625 |
| 6 | 131.4 | 0.00017562 | 93.3041 | 79.5158 | 0.0890 | 90.3910 | 51.5897 | 4.27 x 10-12 | 87.625 |
| 7 | 178.85 | 1.6024 | 94.9065 | 106.9965 | 2.2469 | 92.6379 | 68.6845 | 2.8820 | 90.507 |
La Tabla 11 muestra que el primer modo de vibración de los puentes peatonales 1 y 2 puede vibrar en resonancia ante una carrera peatonal rápida; mientras que el primer modo de vibración del puente peatonal 3 puede vibrar en resonancia ante una carrera normal. Los AMS deben estar sintonizados con el primer modo de vibración de los puentes peatonales y deben colocarse en el punto de máxima amplitud modal del primer modo de vibración de cada puente peatonal. Para un diseño previo del AMS, el valor de μ suele estar entre 0.02 y 0.07 (Bachmann et al., 1995); por lo que se evaluó la respuesta dinámica para varias propuestas de AMS, cuyos parámetros óptimos se obtuvieron mediante las ecuaciones (18) a (24). Las frecuencias verticales de vibración en Hz de los puentes peatonales con un AMS se muestran en la Tabla 12 si se consideran los parámetros óptimos; donde el punto de anclaje del AMS es igual a L/2 para el puente peatonal 1 y 3, e igual a 0.586 L para el puente peatonal 2.
Tabla 12: Frecuencias de vibración verticales de los puentes peatonales con un AMS
| Puente peatonal |
|
µ | fd (Hz) |
f1
(Hz) |
f2
(Hz) |
f3
(Hz) |
f4
(Hz) |
f5
(Hz) |
f6
(Hz) |
f7
(Hz) |
| 1 | 0.005 | 0.01 | 3.6139 | 3.4547 | 3.8179 | 14.6 | 32.852 | 58.4 | 91.251 | 131.4 |
| 0.01 | 0.02 | 3.5784 | 3.3671 | 3.8782 | 14.6 | 32.854 | 58.4 | 91.251 | 131.4 | |
| 0.025 | 0.05 | 3.4762 | 3.1856 | 3.9821 | 14.6 | 32.859 | 58.4 | 91.253 | 131.4 | |
| 0.05 | 0.1 | 3.3182 | 2.9720 | 4.0726 | 14.6 | 32.867 | 58.4 | 91.256 | 131.4 | |
| 0.1 | 0.2 | 3.0417 | 2.6677 | 4.1576 | 14.6 | 32.878 | 58.4 | 91.26 | 131.4 | |
| 2 | 0.0044 | 0.01 | 3.1423 | 3.0066 | 3.3231 | 10.306 | 21.502 | 36.769 | 56.106 | 79.516 |
| 0.0088 | 0.02 | 3.1115 | 2.9304 | 3.3757 | 10.306 | 21.504 | 36.769 | 56.107 | 79.517 | |
| 0.022 | 0.05 | 3.0226 | 2.7718 | 3.4657 | 10.306 | 21.508 | 36.771 | 56.107 | 79.518 | |
| 0.044 | 0.1 | 2.8852 | 2.5859 | 3.5445 | 10.307 | 21.515 | 36.773 | 56.108 | 79.52 | |
| 0.088 | 0.2 | 2.6449 | 2.3204 | 3.6184 | 10.308 | 21.524 | 36.776 | 56.109 | 79.523 | |
| 3 | 0.004 | 0.01 | 2.7351 | 2.617 | 2.8925 | 7.6301 | 14.96 | 24.726 | 36.938 | 51.59 |
| 0.008 | 0.02 | 2.7083 | 2.5506 | 2.9382 | 7.6301 | 14.962 | 24.726 | 36.939 | 51.59 | |
| 0.02 | 0.05 | 2.6309 | 2.4124 | 3.0164 | 7.6301 | 14.967 | 24.726 | 36.941 | 51.59 | |
| 0.04 | 0.1 | 2.5114 | 2.2502 | 3.0848 | 7.6301 | 14.975 | 24.726 | 36.944 | 51.59 | |
| 0.08 | 0.2 | 2.3021 | 2.0188 | 3.1489 | 7.6301 | 14.987 | 24.726 | 36.948 | 51.59 |
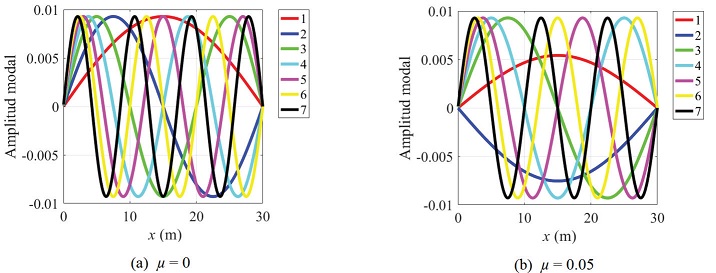
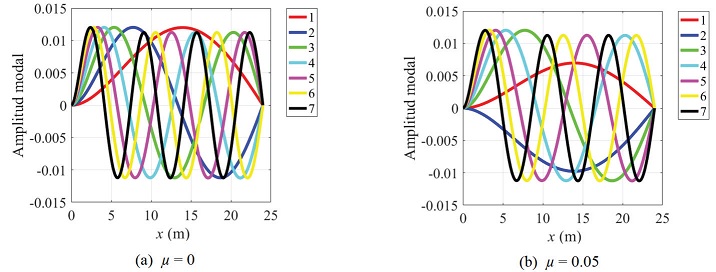
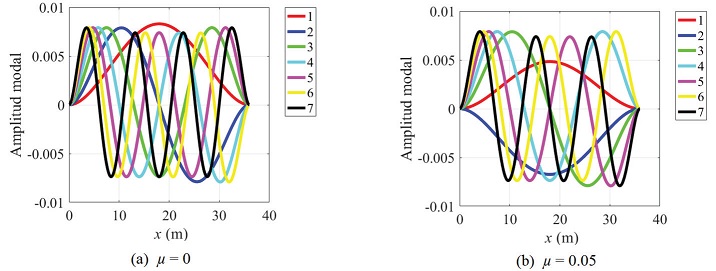
Los modos de vibración verticales de los puentes peatonales con µ = 0 (sin AMS) y con µ = 0.05 se muestran en las Figuras 6, 7 y 8 para los puentes peatonales 1, 2 y 3, respectivamente.
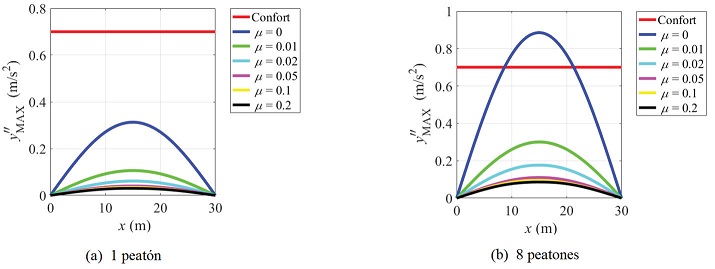
Los tres puentes peatonales estudiados se encuentran ubicados en una zona que es posible que los peatones pasen corriendo, por lo que estos fueron evaluados para cuatro casos de carga peatonal: uno, dos, cuatro y ocho peatones en grupo, los cuales corren en resonancia con la frecuencia fundamental vertical de los puentes peatonales. Las respuestas dinámicas máximas de aceleraciones de los tres puentes peatonales ante 1 peatón y 8 peatones se muestra en las Figuras 9, 10 y 11, respectivamente; donde µ = 0 representa el caso sin AMS.
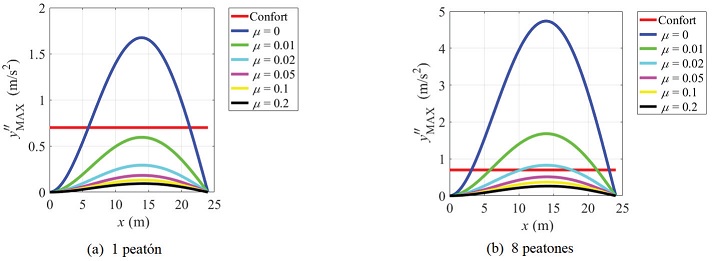
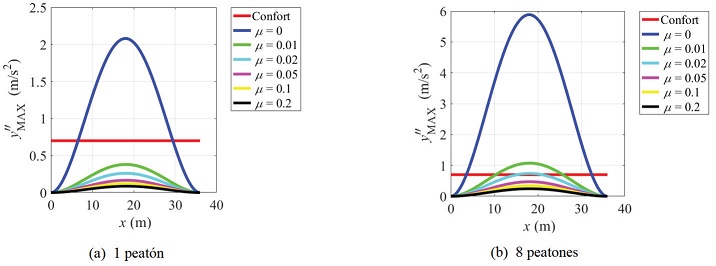
Se eligió el AMS de menor masa que logrará satisfacer el estado límite de confort para los cuatro casos de carga de los tres puentes peatonales. Los parámetros de diseño de los AMS se muestran en la Tabla 13, donde x d es el punto de colocación del AMS.
Tabla 13: Diseño final de los AMS de los puentes peatonales
| Puente peatonal |
|
µ | fd (Hz) | m d (kg) | kd (N/m) | cd (N s/m) | xd (m) |
| 1 | 0.005 | 0.01 | 3.6139 | 115.9192 | 59,766.5352 | 317.5926 | 15 |
| 2 | 0.022 | 0.05 | 3.0226 | 347.0425 | 125,170.2394 | 1,677.3451 | 14.064 |
| 3.0226 | 347.0425 | 125,170.2394 | 1,677.3451 | 37.0929 | |||
| 3 | 0.02 | 0.05 | 2.6309 | 725.7459 | 198,320.5526 | 3,053.6751 | 18 |
Los AMS asociados a la Tabla 13 se muestran en las Figuras 12, 13 y 14, respectivamente; considerando que las masas están hechas de placas de acero con una densidad de 7,850 kg/m3.


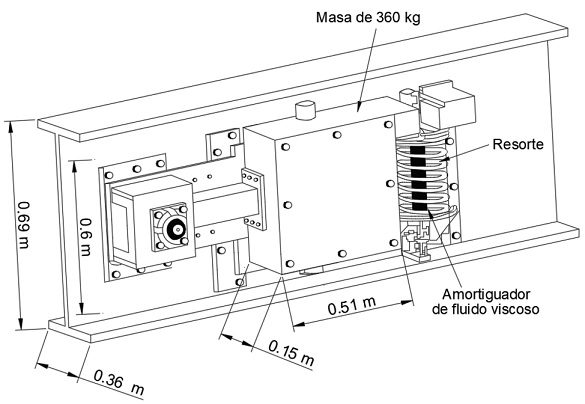
El diseño del AMS del puente peatonal 1 (Figura 12) es diferente al utilizado en los puentes peatonales 2 y 3 (Figuras 13 y 14), esto debido a su diferente estructuración. Los AMS de las Figuras 13 y 14 se deben colocar en ambas vigas longitudinales de los puentes peatonales 2 y 3, respectivamente; esa es la razón por la cual las masas, resortes y amortiguadores de los AMS de las Figuras 13 y 14 son de aproximadamente la mitad de los valores presentados en la Tabla 13.
Conclusiones
Debido al crecimiento de las ciudades, la infraestructura vial también tiende a crecer, teniéndose avenidas vehiculares con mayor tránsito y en ocasiones con mayor número de carriles, lo que genera que los usuarios utilicen puentes peatonales con un claro más largo y por tanto más flexibles. En México, actualmente no existe una normativa de diseño para este tipo de estructuras, por lo general se diseñan para satisfacer las condiciones estéticas-arquitectónicas de la urbe; o se diseñan estructuras tipo, es decir, diseños generales que se colocan en cualquier sitio sin importar las condiciones de uso locales. Uno de los problemas que presentan la mayoría de los puentes peatonales son las condiciones de servicio por confort que subjetivamente le inducen cierta seguridad al usuario. En este trabajo se establece el procedimiento numérico para el análisis dinámico de puentes peatonales considerándolos como vigas continuas con diferentes condiciones de apoyo y sometidas a una carga peatonal vertical móvil. Se diseñaron los dispositivos conocidos como amortiguadores de masa sintonizada, los cuales permiten sintonizar o acoplar sus frecuencias con la frecuencia vertical del puente, la cual se considera como desfavorable. El objetivo es modificar su respuesta dinámica tal que sean satisfechas las limitaciones de diseño. Dicha metodología se aplicó a tres puentes peatonales con características estructurales comunes en México, diseñándose los dispositivos de control pasivo que permitan satisfacer el estado límite de servicio.

