











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
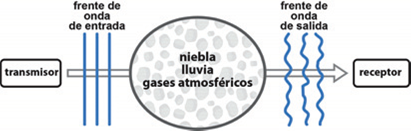
Los enlaces de comunicaciones ópticas espaciales (entre uno o varios satélites con una o varias estaciones terrenas) pueden realizarse a través de la atmósfera terrestre y el espacio exterior (Figura 1). En este tipo de enlaces se utilizan normalmente láseres como fuentes emisoras y etapas de fotodetección como elementos receptores requiriendo el uso de antenas ópticas (telescopios y lentes) tanto en la etapa transmisora como en la receptora (Figura 2). Una característica importante de los sistemas de comunicación óptica atmosférica es el requerir “línea de vista” para poder operar adecuadamente (Figura 1). Para lograr esta línea de vista se realiza en primer lugar la operación de apuntamiento y rastreo grueso entre transmisor y receptor, para lo cual pueden utilizarse las etapas de RF, GPS y sistema de actitud cuando son incluidas en la plataforma del satélite; las efemérides de la trayectoria satelital son entonces parte fundamental en la etapa de apuntamiento, rastreo y seguimiento inicial del sistema. Una vez que se consigue la línea de vista para establecer un enlace óptico satelital, se requiere un sistema de sincronización óptica espacial, también denominado sistema de apuntamiento, adquisición y rastreo (o ATP por sus siglas en inglés, Acquisition Tracking and Pointing), que usa comúnmente un haz óptico no modulado (faro óptico). Además, dado que dicho sistema debe operar en la atmósfera terrestre, su buen desempeño puede verse limitado por la atenuación del faro óptico ocasionada por la presencia de moléculas de gas y aerosoles (y en algunos casos, debido a la presencia de contaminantes) además de la turbulencia óptica (Andrews & Phillips, 2005), (Figura 3). Los sistemas de sincronización óptica espacial empleados para satélites medianos o de mayor tamaño, así como aquellos que se emplean en enlaces ópticos terrestres pueden ser considerados como una tecnología madura; sin embargo, la investigación y desarrollo tecnológico de dichos sistemas aún continúa a nivel internacional de forma importante, principalmente (aunque no exclusivamente) para enlaces de satélites de menores dimensiones tanto para comunicaciones clásicas como cuánticas (Chang et al., 2019; Rose et al., 2018; Abrahamson et al., 2015; Kaymak et al., 2018). Es en este último punto donde se encuadra el trabajo aquí presentado y en el contexto de un proyecto desarrollado con Fondos de la Agencia Espacial Mexicana.


Sistemas de sincronización óptica espacial
Un sistema de sincronización óptica espacial (ATP) está formado por tres subsistemas: de adquisición (Acquisition), de rastreo (Tracking) y de apuntamiento espacial (Pointing) de un haz óptico (Hemmati, 2006; Lambert & Casey, 1995). Generalmente se establece una secuencia determinada para llevar a cabo esta operación, por ejemplo (Arvizu et al., 2018):
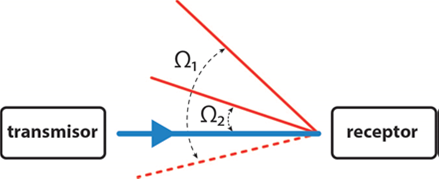
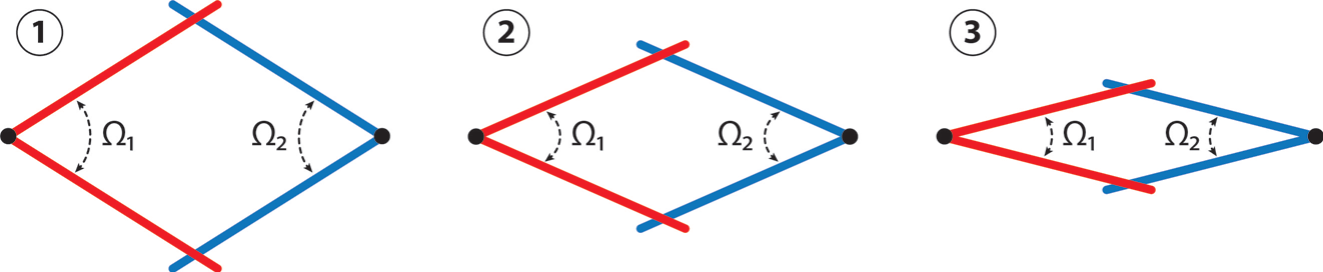
Apuntamiento grueso: El sistema de apuntamiento en tierra se basa tanto en las efemérides como en la información del GPS a bordo del satélite y del enlace RF de telemetría del mismo para determinar el momento adecuado y la dirección hacia la cual debe ser apuntado el faro óptico. Para establecer el enlace óptico el transmisor debe ser apuntado apropiadamente al receptor, el cual debe determinar la dirección de llegada del haz transmitido. El elemento de apuntamiento de un sistema realiza la función de redirigir la línea de vista tal que el sistema tenga acceso a un ángulo sólido grande para un apuntamiento inicial antes de la adquisición. En general, el haz del faro óptico enviado en esta etapa debe ser lo más ancho posible para que alcance a iluminar por completo al satélite. Si el satélite es capaz de ubicar el faro óptico, esto permite el inicio de la sincronización espacial (Figura 4).
Adquisición espacial: La operación de mantener el apuntamiento y la adquisición durante el periodo de comunicación se denomina rastreo o seguimiento espacial, para esto puede transmitirse un haz expandido como faro óptico o un faro independiente (láser no modulado a una longitud de onda diferente a la del transmisor) que se coloca en el receptor. En un sistema bidireccional, cada transmisor puede servir como faro (Figura 5). El faro puede ser sensado con diversas técnicas; empleando dispositivos de carga acoplada (CCD’s, charge coupled devices) y los fotodetectores de 4 cuadrantes p.i.n o de avalancha (QPIN o QAPD). Los detectores de cuatro cuadrantes tienen, en general, una sensitividad muy alta y mejor velocidad de respuesta que los CCD’s, por ello se seleccionó un detector de cuatro cuadrantes, cuyo funcionamiento puede describirse usando la Figura 6, considerando que incide una señal óptica sobre el detector y la intensidad detectada en cada uno de sus cuadrantes que se emplea para obtener la posición de dicha señal en azimuth y elevación, de acuerdo con las ecuaciones (1) y (2). El objetivo de un sistema ATP es obtener y mantener el nivel óptimo de potencia óptica incidente, en primer lugar, en el centro del fotodetector de cuatro cuadrantes y posteriormente, en un fotodetector empleado para el enlace de comunicaciones. Para esto, se requiere el ajuste dinámico de la posición del haz incidente en el fotodetector que puede lograrse de diversas formas, por ejemplo, usando motores de pasos que mueven espejos en los que incide el haz (Mendieta et al., 2001), sistemas de levitación magnética (Morán et al., 2013) o mediante el uso de monturas gimbal (Figura 7) entre otras. En particular, en este trabajo se seleccionó la montura gimbal (Arvizu et al., 2018).


Técnicas de seguimiento espacial
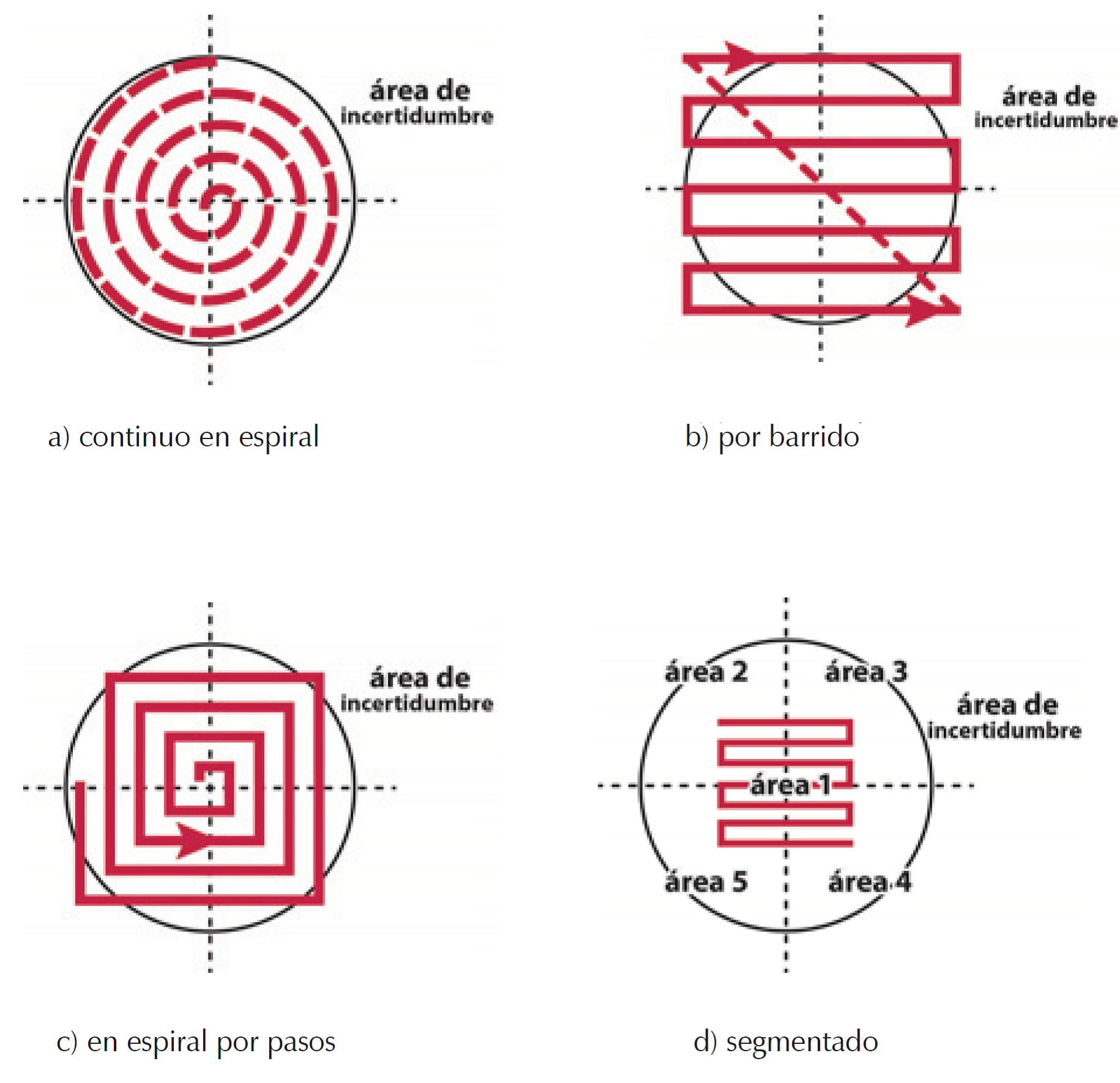
El proceso de rastreo o seguimiento espacial puede realizarse de diversas formas (Lambert & Casey, 1995):
a) Continuo en espiral: Es la técnica más eficiente para cubrir el área de incertidumbre. El ancho de la espiral estará determinado por la divergencia del haz y el área de incertidumbre (Figura 8a). Las ecuaciones para este rastreo son:
Donde XS’, YS son la posición de los ejes X y Y, respectivamente, velocidad radial Vr y velocidad angular Vθ’ , están dadas por:
Donde N es el número de anillos de la espiral.
b) Por barrido: Consiste en rastrear un eje a lo largo del área determinada e incrementar el otro eje al final de dicha área. El primer eje se regresa entonces en la dirección contraria (Figura 8b). Este barrido puede ser descrito como una función discontinua consistente de N escaneos horizontales y N - 1 pasos verticales. Este rastreo, más lento que el continuo en espiral, es menos utilizado para sistemas de comunicaciones ópticas por espacio libre.
c) Espiral por pasos: Consiste en una mezcla de las 2 técnicas anteriores (Figura 8c). Se requiere que tenga una velocidad lineal constante e incrementar un eje cada determinada distancia.
Segmentado: El rastreo se divide en segmentos o secciones del área de incertidumbre (Figura 8d). Se rastrea primero la sección que tiene mayor probabilidad de detección espacial, que es el centro del detector y después las secciones de alrededor.
Estrella artificial
Para caracterizar al subsistema ATP motivo de este trabajo, se utiliza el método de estrella artificial que se emplea comúnmente en instrumentación astronómica, donde una estrella artificial se construye utilizando una fuente de luz blanca, un sistema formador de imagen, un orificio muy pequeño (pinhole) y un filtro (Malacara & Welford, 2007). Sin embargo, en comunicaciones ópticas es más conveniente utilizar un láser como fuente de luz, así no es necesario un filtro óptico, pues la emisión láser es monocromática y en lugar de utilizar un pinhole se emplea fibra óptica y como elemento formador de imagen un telescopio (Figura 9). Esta técnica de estrella puede emplearse para optimizar el desempeño de diversos sistemas ópticos, desde los que cuentan con un solo elemento óptico hasta sistemas mucho más complejos como los telescopios astronómicos. En nuestro caso, el uso de esta técnica es de suma importancia para alineación del satélite con la estación terrena, para esto todas las antenas ópticas (telescopios) usadas en el enlace son comprobadas en tierra enfocándolas al infinito y utilizando un telescopio como estación óptica terrena siendo posible enfocar ambas antenas ópticas (transmisor y receptor) sin necesidad de lanzar un satélite.
Diseño e implementación del sistema de sincronización óptica espacial (ATP)
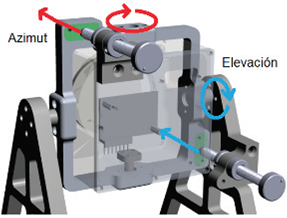
El ATP diseñado (Figura 10), es un subsistema capaz de seguir pequeñas desviaciones del haz proveniente del faro óptico. El componente que realiza el movimiento es un dispositivo tipo gimbal con dos grados de libertad angulares: altitud y azimuth. El movimiento resultante es una alineación que cubre un ángulo sólido de unos cuantos grados (del orden de una decena de grados) cuyo campo de visión puede barrer áreas enormes debido a la gran distancia del enlace.
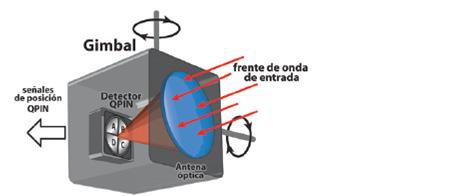
El mecanismo gimbal construido, es parecido en su funcionamiento a las monturas altazimutales de los telescopios astronómicos, cuya tarea es alinear el frente de onda entrante en el elemento ‹objetivo› para hacer coincidir la convergencia del haz hacia el centro del sistema detector. La alineación dinámica se lleva a cabo mediante la combinación de un elemento detector de posición de alta velocidad (QPIN) y de un sistema de control de movimiento del gimbal. El elemento detector es un fotodetector de 4 cuadrantes del que se habló anteriormente, este elemento en conjunto con una electrónica de adaptación, entrega señales eléctricas hacia un sistema mínimo que lee la posición del haz en el fotodetector y corrige la posición angular del gimbal utilizando un conjunto de motores de paso que mueven al gimbal. Como se mencionó anteriormente, existen dos tipos de fotodetectores de cuatro cuadrantes, QPIN y QAPD. Estos últimos tienen una muy alta sensitividad, pero agregan mayor ruido en la etapa de detección debido al efecto de avalancha, además requieren operarse con fuentes de alto voltaje complicando su implementación práctica. Así, en nuestro caso, es más conveniente utilizar un QPIN para el prototipo de laboratorio y enlaces atmosféricos terrestres, pues si usáramos un QAPD debido a su alta sensitividad se saturaría muy fácilmente debido al ruido ambiental residual.
Es necesario tener en cuenta muchas variables para el diseño del subsistema ATP gimbal, entre las principales a considerar:
Longitud de onda de trabajo
Distancia del enlace
Velocidad de adquisición
Velocidad de movimiento
Tamaño del subsistema
Algoritmos de captura y seguimiento
Requerimientos de energía
Como puede verse, el diseño del sistema ATP presenta retos importantes, tanto en el área de diseño óptico, en el diseño e implementación electrónica, así como en el diseño y construcción mecánica. De esta forma, un grupo interdisciplinario de diferentes especialidades e instituciones de investigación mexicanas (CICESE, INAOE, Cetys Universidad campus Ensenada y el Observatorio Astronómico Nacional de la UNAM en Ensenada, B.C.) trabajó en el diseño y construcción del prototipo de ATP que se presenta en este trabajo.
En la parte óptica se utilizó una lente plano-convexa como elemento convergente de 42 mm de apertura y 50 mm de distancia focal. Dado que la longitud de onda de trabajo es 980 nm es necesario utilizar filtros ópticos pasa banda para evitar saturar al fotodetector con señales ambientales de otra longitud de onda; esto, en conjunto con un sistema de ‘baffles’, evita que rayos ópticos que no provengan de la estación terrena se introduzcan en el gimbal y ocasionen falsas detecciones (Figura 11).
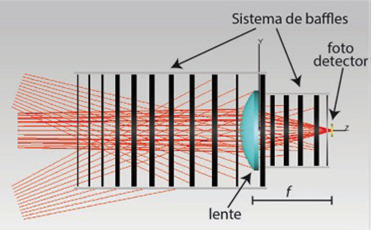
La escala de placa determina la distancia en el plano focal que se necesita para cubrir determinado ángulo. Para el detector utilizado se diseñó el sistema con una escala de placa de 68.78 min arco/mm, con el diámetro del detector de 7.8 mm se puede cubrir un ángulo de 8.9°.
La parte mecánica se encargó de diseñar un sistema tipo gimbal con movimiento altazimutal que mediante un movimiento lineal de tornillos de ajuste fino modifique la posición angular del dispositivo mecánico en un ángulo sólido mayor a 8.9 ° (para este caso se eligió 10 °). El gimbal se fabricó en aluminio maquinado para obtener el menor peso posible.
El sistema electrónico (Figura 12), tiene como función adquirir las señales analógicas entregadas por la tarjeta. El fotodetector de 4 cuadrantes QP50-6SD2 de la compañía Pacific Silicon entrega 3 señales analógicas de voltaje:
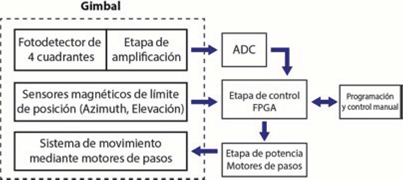
Figura 12 Diagrama a bloques de la etapa de control. ADC: programable convertidor digital a analógico, FPGA: arreglo de compuertas programable
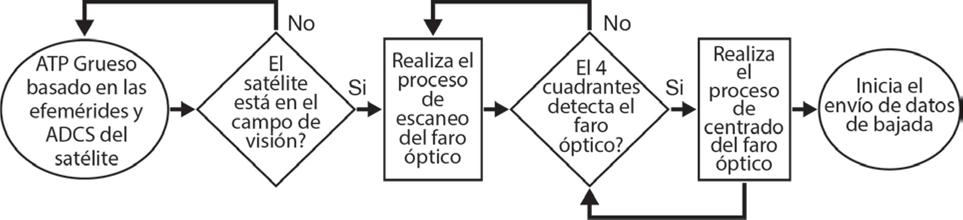
Donde V1-4, son voltajes proporcionales al nivel de intensidad óptica incidente en cada uno de los cuatro cuadrantes del QPIN. Las señales X1-3 son digitalizadas por un Arduino Nano y procesadas (de acuerdo con las ecuaciones (1) y (2)) por un arreglo de compuertas programable (FPGA) Digilent Cmod S6 para obtener la posición del haz incidente en el QPIN en azimuth y altitud, respectivamente. Este FPGA controla a su vez en lazo cerrado el movimiento de dos motores de pasos lineales modelo 39BYGL (manejados por el controlador DRV8825 Stepper Motor Controller IC), que mueven a los tornillos de ajuste fino del gimbal para que el haz del sistema convergente se desplace hacia el centro del fotodetector, garantizando así que el sistema esté alineado con el faro óptico proveniente de la estación terrena (Figura 10); adicionalmente se utilizan sensores magnéticos de fin de carrera para cada eje de movimiento, lo que permite decidir la posición inicial del sistema. La adquisición del faro es la etapa inicial del algoritmo de funcionamiento del ATP, en esta etapa se lanza el faro desde la estación terrena hacia la posición indicada por las efemérides del satélite y se le indica al satélite mediante telemetría que inicie la búsqueda dentro del ángulo sólido de adquisición del haz, hasta colocar al mismo en el fotodetector, ya con el haz adquirido se procede a la etapa de sincronización y seguimiento del faro. El algoritmo para la adquisición y seguimiento del haz se muestra en la Figura 13.
Como resumen del diseño del gimbal se muestran en la Tabla 1 los principales parámetros de diseño y como a partir de un modelo en 3D se construyó el prototipo de la montura de precisión gimbal (Figura 14). Se construyó de manera que el movimiento de búsqueda pudiera ejecutarse de forma manual o automática. La montura cuenta con varios elementos que cumplen funciones específicas, a continuación se detalla el funcionamiento de cada elemento. El cuerpo principal de la montura de precisión gimbal es una caja cuadrada con una tapa trasera desmontable, dentro de la caja, en la tapa trasera, va montado el fotodetector QPIN, que cuenta con un conector DB9 hembra para los cables de las señales del QPIN. Las medidas de esta caja tienen el suficiente espacio para dar margen a la distancia focal establecida anteriormente. La tarjeta del detector QPIN se colocó en la tapa trasera de manera que el área activa del QPIN quedara justo en el centro geométrico de la misma (Figura 15). Esta caja cuenta además con un orificio circular roscado en su cara anterior. En esta parte de la caja va un tubo roscado en el cual se acopló la lente y el seguro de la lente, Para obtener la rotación del gimbal respecto a los ejes X, Y se utilizaron 2 tornillos de ajuste fino que trabajan en conjunto con un sistema “cargado”. Al girar los tornillos de ajuste fino estos se mueven linealmente en el eje Z moviendo angularmente a la caja (Figura 16). El movimiento de rotación en estos ejes permite realizar la búsqueda del faro óptico. Al girar los tornillos de ajuste fino se lleva a cabo el movimiento de búsqueda del gimbal. Los tornillos de ajuste fino utilizados proporcionan un movimiento lineal de 1/80 de pulgada equivalente a 0.3175 mm lineales por cada vuelta realizada. La caja se mueve utilizando rodamientos en los 4 puntos de apoyo de cada eje (2 en el eje X y 2 en el eje Y).
Tabla 1 Parámetros de diseño del gimbal
| Valores | Unidades | |
| Resolución mecánica | 1.1 | m/grados |
| Límite angular Azimuth | ± 5 | grados |
| Límite angular Altitud | ± 5 | grados |
| Apertura Gimbal | 42 | mm |
| Distancia focal | 50 | mm |
| Escala de placa | 68.78 | min arco/mm |
| Diámetro del detector | 7.8 | mm |
| Filtro óptico | Tipo EdgePass @950 | nm |
| Motores de pasos con reductor de velocidad | 512 | pasos/rev |
| Tornillos de ajuste fino | 80 | hilos/pulgada |


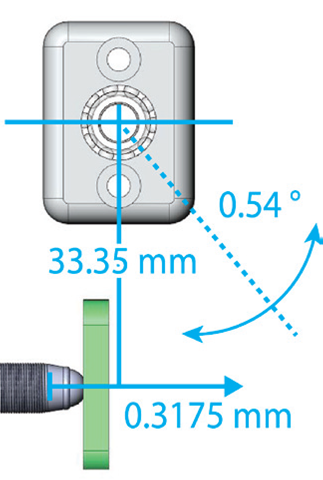
Para convertir el movimiento lineal de los tornillos de ajuste fino en desplazamiento angular en el eje X y Y, respectivamente, se tiene que al realizar una vuelta del tornillo de ajuste fino la caja del gimbal gira 0.545° en el eje correspondiente (Figura 17).
Donde:
α = Ángulo de giro
a = Desplazamiento lineal por una vuelta de tornillo de ajuste fino
c= Distancia desde el eje de giro hasta punto de contacto del tornillo de ajuste fino
Se muestra una imagen del prototipo final de la montura de precisión gimbal mostrando varios detalles del mismo tales como antena óptica, “bafles”, motores, QPIN, entre otros (Figura 18).

Resultados experimentales
Para una mejor caracterización experimental del subsistema ATP desarrollado se requeriría el uso de un faro óptico situado a la distancia de un enlace óptico de espacio libre satelital (los satélites de órbita baja se encuentran a una distancia de 640 km a 3000 km de la superficie terrestre) lo cual no es factible antes de lanzar el satélite, pero mediante la técnica de la estrella artificial es posible simular un faro con dichas características. Para esto, se lleva a cabo un proceso de calibración empleando dos telescopios marca MEADE LX200-ACF, produciendo un haz colimado de 14’’ de diámetro enfocado a infinito, así puede observarse una estrella en laboratorio de la misma manera que se observaría en el cielo.
Lo primero es enfocar un objeto en el infinito (observar una estrella o planeta). Un primer telescopio se utiliza para captar un objeto en el infinito. Se empleó una cámara CCD Prosilica para captar las imágenes del objeto. La finalidad fue dejar calibrado este telescopio para que cuando se tenga un frente de onda plano incidente se forme imagen en el plano focal del telescopio en el cual se encuentra la cámara (Figura 19).

Al observar con el telescopio un objeto que se encuentra en el infinito se asegura que el telescopio formará una imagen al tener un frente de onda plano (fuente puntual en el infinito).
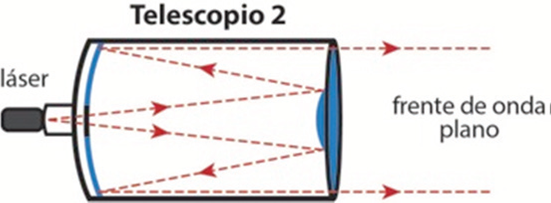
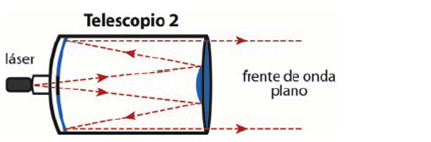
La segunda etapa implica utilizar un segundo telescopio al que se acopla una fuente de luz láser (faro óptico). En nuestro caso es un láser confinado en una fibra óptica y un extremo de esta se coloca en el plano focal del segundo telescopio, generando un haz colimado (Figura 20).
Lo siguiente es colocar los dos telescopios frente a frente mediante la correcta alineación de uno respecto al otro para que una vez que ambos telescopios compartan el mismo eje óptico, en el telescopio 1 se vea la imagen de la fuente del telescopio 2.
Para asegurar que se tiene un haz colimado en el telescopio 2 es necesario ajustar la distancia focal de este. Visualizando en una computadora la imagen que se forma en la cámara del telescopio 1 se procede a ajustar la distancia focal del telescopio 2, una vez que se tiene imagen en la cámara del telescopio 1 se tiene un haz colimado (Figura 21).

Figura 21 Diagrama experimental para obtener una estrella artificial, a) esquemático, b) implementación en el laboratorio
Como se mencionó anteriormente, un haz láser enviado desde la estación terrena servirá como “faro” para que el gimbal montado en el satélite ubique la posición angular del faro y pueda transmitir una señal de datos de regreso hacia la estación terrena mientras se mantiene la condición de línea de vista. Debido a que el satélite está en movimiento, el gimbal debe ser capaz de adquirir y seguir al faro mientras se realiza el enlace de bajada.
Dado que no es posible realizar pruebas satelitales de forma práctica se recurre a pruebas indirectas para caracterizar y optimizar la etapa óptica del sistema. Para un enlace satelital de larga distancia (> 500 km), un láser con un diámetro inicial de 2 mm y un ángulo de divergencia de 0.35 mrad, después de propagarse 500 km llegará con un diámetro de mancha del orden de 350 m. Debido a la enorme distancia de propagación del haz, el frente de onda que llega al gimbal puede considerarse como plano, por lo que esta condición debe replicarse en laboratorio para caracterizar y optimizar la etapa óptica. Para optimizar la etapa óptica del gimbal se realizaron pruebas experimentales usando la técnica de estrella artificial con el esquema mostrado en la Figura 23, con este método adicionalmente es posible obtener la escala de placa del sistema y utilizando una doble apertura en el telescopio receptor, es posible evaluar las condiciones de turbulencia al medir los centroides de las dos manchas recibidas en una cámara digital. De manera práctica, en el laboratorio se utilizó un láser visible de 532 nm (verde) como faro óptico para determinar la escala de placa del sistema óptico, dos telescopios Meade de 14’’ (LX200-ACF) y una cámara digital de alta velocidad (monocromática) adaptada al gimbal a la misma distancia en la que se coloca el fotodetector de cuatro cuadrantes.
El primer paso es obtener el frente de onda plano de uno de los telescopios con el láser verde, utilizando el método descrito en la sección anterior. Este frente de onda plano visto con un telescopio o el gimbal se verá como estrella enfocada a infinito, de esta forma simularemos que el faro se encuentra a una distancia de orbita satelital.
El objetivo es posicionar a la distancia exacta los elementos ópticos para que un frente de onda plano converja en un solo punto del fotodetector, es decir, que la distancia focal efectiva del gimbal corresponda a un sistema óptico enfocado a infinito.
Cuando la estrella artificial está enfocada en el CCD de la cámara se observa un solo punto como en la Figura 22a, y cuando está desenfocada se observa una mancha (Figura 22b). La distancia focal efectiva del sistema se obtuvo de esta medición, resultando 49 mm. Con esta prueba también se determina la escala de placa, la cual resulto en 68.78 min arco/mm.

Una prueba adicional es la visualización de la estrella artificial con dos aperturas de diferente ángulo de convergencia. Para esta prueba se colocan en la entrada del telescopio receptor dos aperturas de igual tamaño, a una de estas se le coloca un prisma con un vidrio de espesor determinado, suficiente para lograr un camino óptico diferente (Figura 23). El resultado es una proyección de dos estrellas en el plano focal de telescopio receptor, donde se ubica la cámara digital. Las imágenes originales de las estrellas dobles y un análisis por computadora muestra cómo varía el ancho y la distancia de los centroides de las estrellas para imágenes sin y con turbulencia (Figura 24).
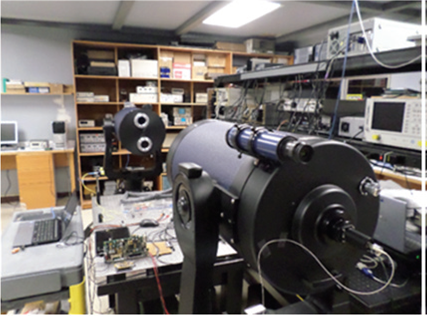

Figura 24 Imagen de estrella artificial con dos aperturas: renglón superior sin turbulencia, renglón inferior con turbulencia
Como se ha descrito anteriormente, la señal del faro óptico debe incidir en el QPIN donde se realiza el proceso de centrado del mismo. Para llevar a cabo esta operación, como se mencionó arriba, se procesan las señales de los cuatro cuadrantes y se obtiene el azimuth y elevación del faro óptico en el detector y en caso de que el faro óptico no se encuentre en el centro, debe corregirse su posición mediante un sistema de motores retroalimentados en lazo cerrado. Adicionalmente al control de la posición angular es conveniente tener en el laboratorio una visualización de la ubicación del faro en el QPIN, para esto se diseñó un programa en Matlab que despliega dicha posición en tiempo real tal como se ilustra en las Figuras 25a y 25b. Así, con esta aplicación se puede observar el seguimiento y caracterización del movimiento angular del gimbal a través del tiempo.

Figura 25 Despliegue de la posición del faro en el QPIN mediante Matlab, a) trayectoria seguida durante el proceso de barrido, b) centrado del haz
Dado que el objetivo final de los subsistemas reportados en este trabajo es su empleo en enlaces de comunicaciones ópticas satelitales en órbita terrestre baja, es muy conveniente (y necesaria) su caracterización en enlaces ópticos atmosféricos de larga distancia. En particular, aquí reportamos los resultados de un enlace óptico atmosférico de 53.8 km de distancia realizado en el mes de julio de 2019 entre el Observatorio Astronómico Nacional ubicado en San Pedro Mártir y un punto ubicado en San Felipe, B.C., México (Figuras 26 y 27). Es muy importante mencionar que este enlace pudo realizarse de manera exitosa gracias a que la caracterización y optimización de los subsistemas en laboratorio fue adecuada y cumplió con los requerimientos de un enlace de larga distancia.

Figura 26. Transmisor óptico (faro óptico y láser para transmisión de datos), ubicado en el Observatorio de San Pedro Mártir (SPM) B.C., México a una altitud de 2800m sobre el nivel del mar

Conclusiones
En este trabajo hemos reportado el desarrollo de un sistema de sincronización óptica espacial para satélites pequeños operando en órbita baja (LEO). Hemos descrito el diseño e implementación de una montura de precisión gimbal con dos grados de libertad, fotodetección de cuatro cuadrantes, así como la electrónica de digitalización y control para tornillos de ajuste fino, los cuales mediante un algoritmo ad-hoc, rigen el buen funcionamiento del gimbal dentro de las especificaciones dadas. Con la finalidad de certificar el buen desempeño de los diferentes subsistemas que conforman nuestro sistema de sincronización óptica espacial generamos en laboratorio una estrella artificial. Reportamos asimismo la caracterización del desempeño del subsistema Gimbal en un enlace óptico atmosférico de larga distancia, el cual se realiza de manera exitosa gracias a que la caracterización y optimización de los subsistemas en laboratorio con los requerimientos de un enlace de larga distancia fue adecuada. Por otro lado, como base para este diseño, se considera que previamente el seguimiento grueso se llevaría a cabo mediante las etapas de RF, GPS y sistema de actitud, los cuales formarían parte de la plataforma del satélite bajo diseño. Actualmente contamos con la especificación de una estación terrena (realizada en colaboración con el grupo de trabajo del INAOE), operando en la banda de RF. Basándonos en dicho desarrollo y el ATP descrito anteriormente, nos encontramos trabajando actualmente en la especificación de la etapa de apuntamiento fino de la estación terrena óptica. Este apuntamiento fino será implementado mediante un mecanismo “tip-tilt”con precisión de 0.25 microrad. Debido a la complejidad del sistema reportado en este escrito, se requirió la participación de especialistas de diversas instituciones tales como el CICESE, el INAOE, Cetys-Universidad Ensenada y el Observatorio Astronómico Nacional de la UNAM. Los subsistemas reportados en este trabajo se desarrollaron dentro del marco de un proyecto con Fondos de la Agencia Espacial Mexicana.

