











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
El objetivo general de este trabajo es el desarrollo de un prototipo de plataforma de transporte que brinde accesibilidad a la infraestructura aeroportuaria y al servicio de transporte aéreo para las personas con movilidad reducida, asimismo a los usuarios en general. Con este diseño se obtendrá experiencia (conocimiento de tecnologías aplicadas, retos, problemáticas y costos, entre otros) en la construcción de este tipo de transporte para establecer las bases de un posterior diseño mejorado.
Los objetivos particulares son: que el diseño sea compacto y de fácil utilización mediante un control remoto; que no genere emisiones de gases contaminantes; que posea versatilidad de movimientos (avance hacia adelante, atrás, y a los lados e incluso debe rotar sin avanzar) y alta maniobrabilidad para pasar por espacios reducidos; que tenga luces integradas con su operación; que se desplace a una velocidad cercana al valor promedio de caminata desarrollado por un peatón dentro de las terminales aeroportuarias; que tenga capacidad para transportar a un usuario de al menos 75 kg, junto con su maleta rodante (25 kg); y que su precio sea asequible. Cabe señalar que de acuerdo con un estudio realizado, en 2012, se encontró que la altura y la masa corporal media de la mujer mexicana es de 1.58 m y 68.6 kg, respectivamente, y para el hombre mexicano los valores medios son 1.64 m y 74.7 kg (El informador, 2012). Por lo que el valor anterior, cerrado a 75 kg, se consideró para el diseño de la plataforma. Por otro lado, el inciso V, Artículo 38 del Reglamento de la Ley de Aviación Civil (SCT, 2014), establece que todo pasajero de cualquier servicio al público de transporte aéreo tiene el derecho de transportar como mínimo, sin cargo alguno, veinticinco kilogramos de equipaje cuando los vuelos se realicen en aeronaves con capacidad para veinte pasajeros o más, y quince kilogramos cuando la aeronave sea de menor capacidad. Con base en estos valores se consideró, para propósitos de diseño de la plataforma, que la maleta de los usuarios tiene una masa de 25 kg.
En noviembre de 2013 se publicó en el Diario Oficial de la Federación la circular obligatoria CO SA-09.2/13, en donde se establecen los lineamientos para la accesibilidad de las personas con discapacidad o movilidad reducida a las infraestructuras aeroportuarias y al servicio de transporte aéreo (SCT, 2013). El objetivo de esta circular es homologar los criterios operativos, administrativos y de infraestructura en la prestación del servicio de transporte aéreo a las personas con discapacidad y movilidad reducida, para garantizar su accesibilidad. El termino accesibilidad se refiere, a aquellas medidas pertinentes para asegurar el acceso de las personas con discapacidad y movilidad reducida, en igualdad de condiciones con las demás, al servicio de transporte aéreo.
Las ayudas técnicas que considera esta circular son todos aquellos dispositivos tecnológicos y materiales que permiten habilitar, rehabilitar o compensar una o más limitaciones funcionales, motrices, sensoriales o intelectuales de las personas con discapacidad o movilidad reducida. Considera los siguientes dispositivos: silla de ruedas manual, silla de ruedas de batería seca, silla de ruedas de batería húmeda, silla pasillera (utilizada para facilitar al pasajero que no puede caminar, subir o bajar escaleras, y llegar hasta el asiento en el interior de las aeronaves), y algún equipo motorizado eléctrico (que técnicamente no se considera como silla de ruedas) que permita el desplazamiento de personas no necesariamente con una discapacidad, sino también, por ejemplo, a personas de la tercera edad o con problemas de sobrepeso. El prototipo que se propone queda comprendido en esta última categoría. Cabe remarcar que, aunque el prototipo está dirigido a las personas con movilidad reducida, también puede utilizarse por personas sin limitaciones físicas, debido a que en los aeropuertos regularmente se requieren caminar grandes distancias, lo cual puede resultar muy demandante, incluso para una persona adulta sana. Por ejemplo, en el Aeropuerto Internacional de la Ciudad de México (AICM) la distancia que se debe recorrer para ir de un extremo al otro en la terminal T1 es de aproximadamente 1.3 kilómetros, y la distancia que recorre el aerotrén que une a las terminales T1 y T2 es de tres kilómetros (AICM, 2018). En el Nuevo Aeropuerto Internacional de la Ciudad de México (NAICM), en construcción, el cual tendrá una superficie seis veces mayor al actual AICM (NAIM, 2018), la distancia que se tendrá que recorrer para ir de un extremo al otro de su terminal de pasajeros será de aproximadamente 2.3 kilómetros. Por lo anterior, algunos aeropuertos han implementado escaleras eléctricas y aceras móviles, sin embargo, estos equipos, además de tener un elevado costo inicial, a menudo también tienen altos costos de mantenimiento y de consumo de energía (Spevacek, y otros, 2014).
La Administración de la Aviación Federal (FAA, 1994) de los Estados Unidos ha establecido la necesidad de instalar aceras móviles, escaleras eléctricas y otros medios para hacer más tolerables las distancias de caminata excesiva dentro de los aeropuertos. Otro lineamiento utilizado extensamente, es el establecido por la Asociación del Transporte Aéreo Internacional (IATA), en donde se sugiere una distancia máxima de caminata, sin ningún tipo de ayuda para los pasajeros, de entre 250 y 300 metros (TransSolutions, University, & Kimley-Horn and Associates, 2012).
Conviene remarcar que la definición de persona con movilidad reducida, se refiere a: “toda persona cuya movilidad se ve reducida por una incapacidad física (sensorial o de locomoción), deficiencia mental, edad, enfermedad o cualquier otra causa que sea un impedimento para el uso de los transportes y cuya situación requiere atención especial“ (SCT, 2013).
En años recientes los administradores aeroportuarios enfrentan el reto de ofrecer una buena experiencia a los pasajeros dentro del edificio terminal, utilizando un presupuesto restringido. Al mismo tiempo, para cubrir el incremento de la demanda del servicio aéreo, la infraestructura del aeropuerto se hace cada vez más grande. Además, conforme la población envejece, se ha presentado la necesidad de atender a estos pasajeros facilitándoles su viaje dentro de la terminal aérea. Por ello, en los aeropuertos se han empezado a agregar servicios e instalaciones para auxiliar a estos pasajeros en su recorrido a través del edificio terminal.
En general, los administradores, diseñadores y operadores de los aeropuertos enfrentan retos significativos en cuanto a cómo mover a los pasajeros más rápido y eficientemente. Para alcanzar estándares aceptables de distancia de caminata, tiempo de transferencia de aeronave a aeronave, y tiempo de tránsito global en la terminal, se utilizan comúnmente distintas tecnologías para la movilidad de los pasajeros. Los vehículos para asistir a los pasajeros tienen un papel importante para aquellos usuarios que necesitan un apoyo especial y además ofrecen flexibilidad, debido a su maniobrabilidad, ya que no requieren un camino exclusivo de circulación (TransSolutions, University, & Kimley-Horn and Associates, 2012). Este trabajo se centra en una propuesta de este tipo de vehículo individualizado, denominado aquí como plataforma de transporte para terminales aéreas.
Diversas evaluaciones de la velocidad de caminata de los peatones dentro de las terminales aeroportuarias, bajo condiciones de flujo libre, establecen que esta tiene un valor promedio de entre 264 y 265 pies por minuto (4.82 y 4.84 km/h), (TransSolutions, University, & Kimley-Horn and Associates, 2012). No obstante, la plataforma propuesta podrá desarrollar velocidades menores para facilitar su conducción y maniobrabilidad cuando así sea requerido. En particular, se estableció una velocidad de 3 km/h para la plataforma cuando va a su máxima capacidad, con un usuario de 75 kg y su equipaje de 25 kg. Si la masa del conjunto usuario-equipaje es menor, la plataforma podrá desarrollar velocidades mayores, y viceversa.
En cuanto a productos similares al que se propone desarrollar, existen ciertos vehículos, conocidos genéricamente como plataformas autobalanceadas. La más conocida corresponde a la empresa norteamericana Segway Inc., que está enfocada a seguridad pública y privada, fábricas, almacenes, centros de distribución, hoteles, logística de eventos y campañas publicitarias (Greenway México, 2018), dependiendo de su modelo este equipo (para adultos) tiene un valor que oscila entre 7,000 y 11,000 dólares. Por otra parte, una nueva tecnología en desarrollo corresponde al denominado WalkCar, el cual se diseña por la empresa japonesa Cocoa Motors, se trata también de un diseño compacto (Cocoa Motors, 2018). Sin embargo, estos vehículos son costosos y no han sido diseñados para utilizarse particularmente en los aeropuertos. Además, estos equipos requieren habilidades particulares para su manejo y difícilmente podrían utilizarse por personas con movilidad reducida, lo cual es más notorio en los diseños compactos de dos ruedas. Por otro lado, en febrero de 2016, la Comisión de Seguridad para los Productos del Consumidor (CPSC) de los Estados Unidos, instó a los fabricantes, importadores y vendedores de plataformas autobalanceadas, a cumplir con los estándares aplicables de seguridad, en particular, en aquellos que utilizan baterías de iones de litio. Debido a que estas tienen un alto riesgo de fuego y los usuarios pueden sufrir heridas o incluso la muerte. Entre el 1o de diciembre de 2015 y el 17 de febrero de 2016, la CPSC, recibió notificaciones de usuarios de 24 entidades de los Estados Unidos reportando 52 incendios de plataformas autobalanceadas, que generaron pérdidas materiales por más de dos millones de dólares (Howell, 2016).
Desarrollo
La plataforma está formada por cuatro sistemas:
En la Figura 1 se muestra el diagrama conceptual de la operación de la plataforma propuesta. Esta se conduce por el usuario mediante una unidad inalámbrica (control remoto). El resto de los sistemas están alojados dentro del sistema estructural, este además, sirve como soporte para transportar al usuario. Cabe señalar que como se puede controlar de forma independiente a cada motor, es posible conducir la plataforma con gran versatilidad. Cuando las dos llantas traseras giran hacia delante o hacia atrás, con la misma velocidad, la plataforma se desplaza en el sentido respectivo siguiendo una trayectoria recta. Para hacer que gire hacia un lado, se disminuye la velocidad de rotación de la rueda de dicho lado. En función de la diferencia de velocidades se cambia la magnitud del radio de viraje, mientras mayor sea la diferencia menor será este radio. Cuando las ruedas motoras giran en sentido contrario, pero a la misma velocidad, la plataforma rota en un mismo lugar sin avanzar. En este caso, dependiendo del sentido de giro de las ruedas, la plataforma rota a la izquierda o a la derecha, mediante el control de las revoluciones de los motores se regula la velocidad de rotación.

El receptor del sistema de control en la plataforma obtiene, mediante radiofrecuencia, las instrucciones transmitidas por el control remoto y se encarga de establecer el sentido de rotación de los motores y su velocidad de rotación en forma independiente, además, activa o desactiva las luces direccionales e intermitentes. Para integrar y administrar estas funciones utiliza un microcontrolador. Con base en los requerimientos del usuario este sistema envía la energía adecuada proveniente de una batería (sistema de energía), a los dos motores de la plataforma (sistema de tracción).
Sistema estructural
En la Figura 2 se presentan los principales componentes del sistema estructural y su relación con el sistema de tracción.
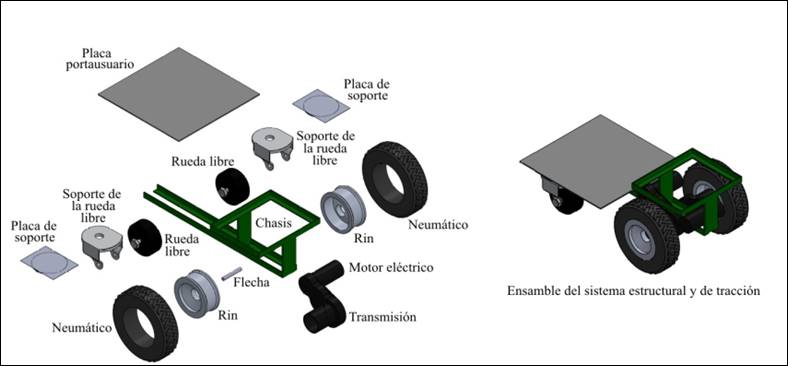
Básicamente, el sistema estructural aloja y protege a los distintos componentes de la plataforma y soporta el peso del usuario y su equipaje. El chasis es el elemento más resistente, en el que se acoplan los distintos componentes. Sobre este se montó la placa portausuario de acero inoxidable (32 x 32 cm). En los extremos derecho e izquierdo, de la parte inferior delantera de la placa se instalaron dos ruedas libres. En la parte trasera del chasis se instaló una flecha y en los extremos de esta se instalaron las ruedas motoras de la plataforma. Sobre la parte trasera del chasis se instaló una cubierta removible, que aloja al sistema de control y a la batería. Además, protege a las dos transmisiones mecánicas, a los dos motores eléctricos, al conjunto de luces traseras y a los cables de las conexiones. En la parte frontal de la placa portausuario se incorporó un soporte opcional desmontable (atornillado), para que el usuario apoye sus manos y tenga más estabilidad, se debe remarcar que este soporte no es un manubrio, dado que no controla la dirección de la plataforma.
Sistema de tracción
La potencia de los motores se determinó para la condición cuando la plataforma arranca y acelera, desde el reposo hasta una velocidad (vf) de 3 km/h (0.8333 m/s). Además, se consideró la propia masa de la plataforma (35 kg), la del usuario (75 kg) y su equipaje (25 kg), es decir, una masa total (mt) igual a 135 kg. Durante el arranque se debe acelerar esta masa desde el reposo (v0) hasta la velocidad señalada (vf). Para lograr la aceleración necesaria (a) se requiere aplicar una fuerza Fa a la plataforma (Figura 3).

La aceleración de la plataforma depende del tiempo (t) en que se alcance la velocidad final vf, se consideró un arranque suave (t = 1.5 s), para evitar desequilibrar al usuario. Bajo estas condiciones, la aceleración estimada es: a = (vf - v0)/t = 0.5555 m/s2. Para generar esta aceleración se requiere aplicar una fuerza Fa con magnitud igual a Fa = mta = 75 N y una potencia mecánica (Pm) igual a Pm = Favf = 62.5 W. La potencia de los motores depende de su rendimiento eléctrico (ηe) y del rendimiento mecánico de la transmisión (ηm). Supongamos, para propósitos de diseño que ηe = 0.7 y que ηm = 0.8, bajo estas condiciones, la potencia eléctrica de los dos motores es igual a 111.6 W, por lo tanto, la potencia de cada motor debe ser al menos de 55.8 W. Si el arranque es más breve, por ejemplo, t = 1 s, entonces la potencia de cada motor se incrementa a 83.7 W. Debido a lo anterior, se seleccionaron dos motores eléctricos que desarrollan una potencia máxima de 90 W cada uno.
El sistema de tracción está formado por dos motores eléctricos de corriente continua con un consumo máximo de corriente por motor igual a 15 A, generando 17,100 revoluciones máximas por minuto. Cada motor tiene una transmisión mecánica para reducir su velocidad de giro con una relación de 114:1. La salida de cada transmisión va unida a un eje fijo ubicado en la parte inferior trasera de la plataforma y sobre este impulsa a una rueda motora (neumático) de 0.2032 m de diámetro. Todos estos componentes se soportan por la estructura de la plataforma (Figura 2).
Sistema de energía
La fuente de energía es una batería automotriz ácido-plomo de 12 V (AM 58-575). Por lo anterior, se deben tomar ciertas precauciones en su manejo y operación. Principalmente, no se debe voltear, debido a que contiene ácido sulfúrico que puede causar ceguera o quemaduras fuertes, cuando se recargue se deben remover sus tapones y se deben colocar firmemente después de la recarga.
Con objeto de saber la capacidad de la batería, en la cubierta superior trasera de la plataforma, se instaló un indicador del nivel de energía. A diferencia de todos los otros diseños electrónicos utilizados, este último se tomó de un foro de electrónica en Internet, por lo que no se presenta aquí.
Debido a que con la operación de la plataforma se descarga la batería, es necesario recargarla, para lo cual se empleó un cargador de baterías externo. El precio de estos cargadores se encuentra entre $500.00 y $1,200.00, dependiendo de la marca y tipo (analógico o digital). Para la plataforma se utilizó un equipo del tipo digital, el tiempo de carga promedio durante las pruebas fue de 5 horas.
Sistema de control
El usuario de la plataforma, mediante el control remoto, decide los movimientos que desea o necesita realizar, seleccionando en primer lugar el tipo de movimiento, para ello, mediante el interruptor de modo de operación hace su selección (Figura 4). Posteriormente, desplazando la palanca de mando (joystick) decide la dirección y velocidad de la plataforma. El interruptor de modo tiene tres posiciones, para seleccionar el movimiento de rotación o de traslación, pero pasando siempre por una posición intermedia (neutra), en la cual la plataforma se detiene primero con el fin de evitar maniobras riesgosas para el usuario. Para controlar el sentido de rotación de los motores se utilizan dos puentes “H” y el control de su velocidad se realiza mediante la modelación del ancho de pulso.

El control remoto
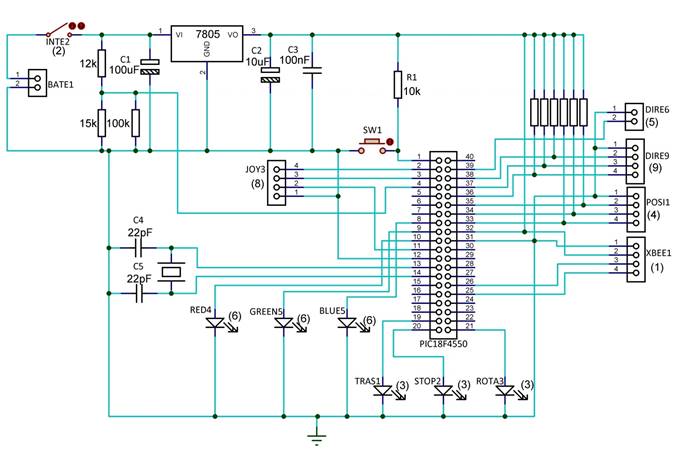
La palanca de mando (Figura 4) está constituida por dos pequeños potenciómetros internos de 10 kΩ, de los cuales se obtienen dos señales analógicas que son utilizadas por un microcontrolador (controlador de interfaz periférico, PIC 18F4550), para gobernar el movimiento de las dos ruedas motoras de la plataforma. Para suministrar el voltaje requerido por el microcontrolador (5 V) se utilizó un regulador de tensión (LM7805). De acuerdo con la posición angular de la palanca de mando se establece la dirección que se desea seguir, y en función de qué tan alejado se ubique del punto central, se establece la magnitud de la velocidad de rotación de los motores. Para ello, las señales analógicas entregadas por los potenciómetros se envían a un convertidor analógico digital (A/D) en el microcontrolador. Los valores digitales de un potenciómetro se asignan como los valores X en un plano cartesiano, y los del otro potenciómetro como los valores Y. Así, el ángulo (ϕ) que tiene la palanca de mando se puede estimar mediante la función arcotangente Y/X, y el desplazamiento de la palanca respecto al cero cartesiano, se obtiene con base en la magnitud de la hipotenusa (H) del triángulo formado por los valores X y Y, es decir, H = (X2 + Y2)1/2. El control del voltaje que llega a cada motor, para regular su velocidad, se realiza mediante la modulación del ancho de pulso. En relación con la palanca de mando, se estableció en la programación del microcontrolador, que su rango de operación para el modo de traslación fuera entre 30° y 150° para movimientos hacia delante, y entre 210° y 330° para movimientos hacia atrás. Para el modo de rotación a la derecha, el rango establecido fue de entre -330° y +30°; y para la rotación a la izquierda entre 150° y 210°. El diseño electrónico del control remoto se presenta en la Figura 5.
Nota: Los números entre paréntesis están relacionados con los señalados en la Figura 4.
Figura 5 Diseño electrónico del control remoto
Para la comunicación entre el control remoto y la plataforma se utilizaron dos módulos inalámbricos, estos se alimentan con una tensión de 5V, y fueron configurados antes de utilizarse. Para ello, en los módulos se grabaron las direcciones MAC (Media Access Control) de cada uno, en forma cruzada, y además se estableció el número de datos enviados por segundo (9,600 baudios). La comunicación entre los módulos inalámbricos y el microcontrolador fue del tipo serial RS232. Se elaboraron dos programas, uno para el envío de datos desde el control remoto (maestro) y otro para su recepción en la plataforma (esclavo). Se debe mostrar que las señales de la palanca de mando son analógicas (X y Y); y digitales las del modo de operación y los estados de las luces direccionales e intermitentes. Además, el control remoto incluye un indicador luminoso (led rgb) del nivel de energía de la pila de 9 V que lo alimenta. Para este indicador se utilizó un divisor resistivo para que el led rgb adquiera el color rojo (tensiones menores a 7V), azul (tensiones entre 7 V y 9 V) o verde (tensiones mayores a 9V).
El control en la plataforma
Las señales generadas por el control remoto son captadas en la plataforma mediante el módulo inalámbrico (receptor) instalado en esta. Posteriormente, estas señales pasan al microcontrolador en la plataforma (PIC 18F4550). Las salidas de este se dirigen a los dos puentes “H” (uno para cada motor) para establecer el sentido de giro de cada motor, y mediante la modulación del ancho de pulso se controla su velocidad de rotación. Además, mediante optoacopladores se controlan las luces intermitentes y direccionales.
El puente “H” utilizado (VNH5019) soporta hasta 30 A pico, y generalmente se emplea para motores de corriente directa con tensiones de entre 5.5 V y hasta 24 V, además, cuenta con protección contra inversión de voltaje, sobrevoltaje, bajo voltaje, sobretemperatura y sobrecarga de corriente. El diseño electrónico del control en la plataforma se presenta en la Figura 6.

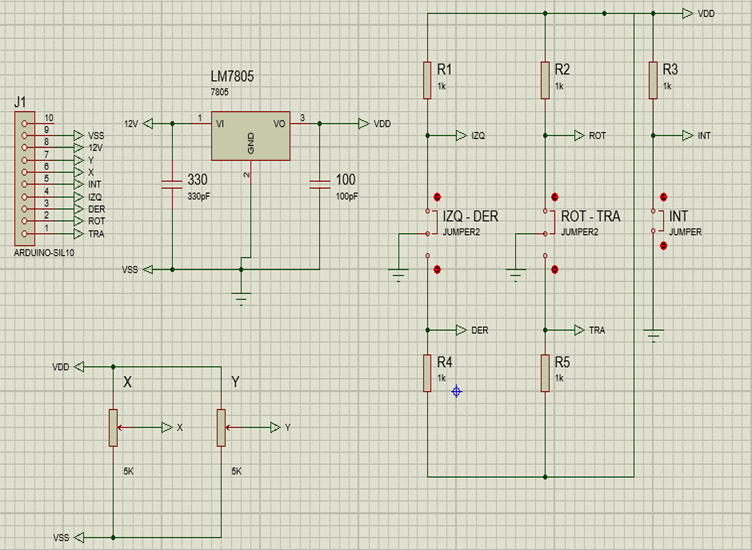
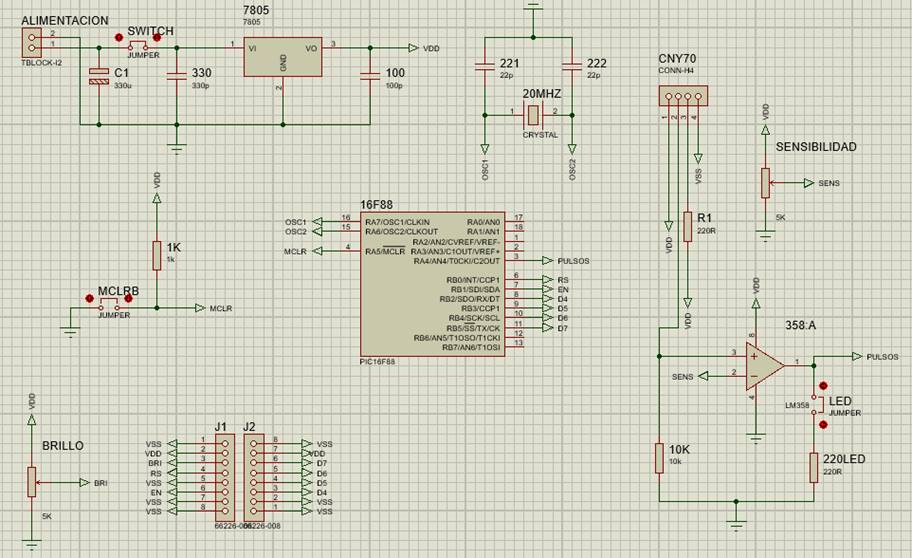
Como complemento opcional, se construyó un control alámbrico (Figura 7), que tiene la ventaja de ser más económico que el inalámbrico, y además no requiere otra fuente de alimentación distinta a la batería de 12 V de la plataforma. Entonces, con el objeto de realizar pruebas de la plataforma se diseñó y construyó un odómetro y un velocímetro (Figura 8). Para su operación, estos toman la señalan de un sensor óptico infrarrojo (CNY70) instalado en el lado interno superior de la plataforma, a una distancia de 0.5 centímetros de la rueda motora derecha. En la parte interna de esta rueda, se realizaron 22 marcas reflejantes, uniformemente distribuidas, las cuales detecta el sensor óptico. En todos los casos los microcontroladores utilizados fueron programados en lenguaje “C”.
Características de la plataforma
En la Tabla 1 se resumen las principales características de la plataforma, en cuanto a sus distintos sistemas y componentes, en términos de masas, costos y dimensiones. En la Tabla 2 se presentan las características de los componentes opcionales de la plataforma.
Tabla 1 Características de la plataforma
| Sistema | Componente o parte | Masa (kg) |
Costo (pesos) |
Dimensiones (cm) | ||
|---|---|---|---|---|---|---|
| Largo | Ancho | Alto | ||||
| Estructural | Dos ruedas de rotación libre | 1.200 | $204.0 | 10.00 | 4.40 | 10.00 |
| Soporte manual de apoyo para el usuario con tornillos, tuercas y rondanas | 3.000 | $200.0 | 15.00 | 49.00 | 108.00 | |
| Chasis, defensa, cubierta inferior y placa portausuario | 9.420 | $400.0 | 70.00 | 32.00 | 18.50 | |
| Cubierta superior trasera | 3.600 | $300.0 | 30.30 | 35.50 | 32.00 | |
| De tracción | Dos llantas motoras (incluyen cámara interior, buje y dos baleros por llanta) | 1.800 | $640.0 | 20.32 | 6.35 | 20.32 |
| Dos motores eléctricos y sus respectivas transmisiones y abrazaderas1 | 1.300 | $724.0 | 5.00 | 12.30 | 5.00 | |
| De energía | Indicador de carga | 0.035 | $90.0 | 2.50 | 7.50 | 1.00 |
| Acumulador | 14.000 | $1,150.0 | 25.40 | 18.30 | 17.70 | |
| De control | Control remoto sin batería2 | 0.190 | $1,335.5 | 19.50 | 5.40 | 2.90 |
| Batería recargable del control remoto (9 V) | 0.050 | $110.0 | 4.90 | 2.70 | 1.60 | |
| Circuito impreso del control en la plataforma con sus componentes, leds y cables3 | 0.405 | $2,201.5 | 10.00 | 10.00 | 2.00 | |
| Totales | 35.000 | $7,355.0 | ||||
Notas: 1Las dimensiones corresponden a las de cada motor eléctrico
2Los componentes más costosos del control remoto son los módulos inalámbricos, el costo de los dos requeridos es de $926.00
3Los componentes más costosos del control en la plataforma son los dos puentes "H", el costo de ambos es de $874.20
Tabla 2 Características de los componentes opcionales de la plataforma
| Componentes opcionales | Masa (kg) | Costo (pesos) | Dimensiones (cm) | ||
|---|---|---|---|---|---|
| Largo | Ancho | Alto | |||
| Odómetro/Velocímetro | 0.150 | $536.00 | 7.00 | 9.60 | 4.20 |
| Control alámbrico | 0.160 | $290.00 | 9.60 | 7.00 | 4.20 |
En la Figura 9 se presentan las vistas de la plataforma para apreciar de una manera integral su arreglo y dimensiones generales.

Por otra parte, en la Figura 10 se muestra el diagrama elemental de toda la operación de la plataforma, enfocado en el aspecto electrónico. Esta figura es un complemento del diagrama conceptual mostrado inicialmente en la Figura 1. Observe que en la Figura 10, el control remoto de la plataforma aparece a la izquierda y los componentes de la plataforma a la derecha. Los elementos críticos del control remoto son el microcontrolador y el módulo inalámbrico, los cuales están interconectados con los indicadores y controladores, y se alimentan de una batería de 9 V.
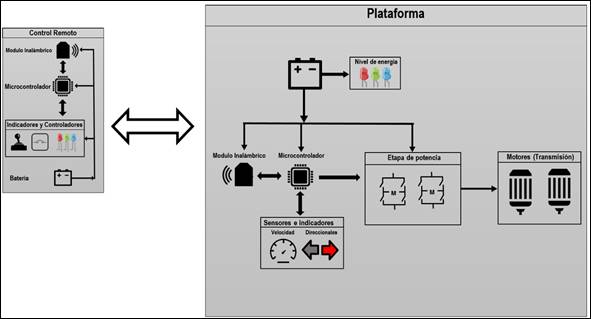
En la plataforma, en cambio, la energía es aportada por el acumulador de 12 V. En este caso, el otro módulo inalámbrico y el microcontrolador son los componentes operativos esenciales, este último es el que está interconectado con los dos puentes “H” para enviar la energía a los dos motores de la plataforma. También se presentan los elementos auxiliares de la operación, por ejemplo, diversos sensores e indicadores para medir la velocidad de la plataforma y el nivel de energía de la batería.
Pruebas de la plataforma
Se realizaron diversas evaluaciones con la plataforma para definir sus características operacionales, maniobrabilidad, estabilidad y comodidad. Para ello, se realizaron pruebas estáticas y cinemáticas, en laboratorio y pista de pruebas. A continuación, se presentan los principales resultados:
Características operacionales.
Autonomía de la plataforma: 4.28 horas a 3.5 km/h (con un usuario de 75 kg).
Alcance: 15 km (con un usuario de 75 kg).
Autonomía del control remoto: 2 horas (en uso continuo).
En la Figura 11 se presenta el desempeño de la plataforma, en terreno plano, con distintas masas sobre ella, en particular, se determinaron los cambios en su velocidad, y las magnitudes de tensión, corriente y potencia eléctrica en cada motor. En general, conforme aumenta la masa transportada, la velocidad de la plataforma disminuye. Por otra parte, mientras mayor es la masa transportada, el voltaje utilizado por los motores tiende a disminuir, en cambio, su corriente tiende a aumentar más rápidamente, por lo que el producto de ambos, la potencia eléctrica requerida para mover la masa transportada, aumenta.

En la Figura 12 se muestran los resultados de varias pruebas, con un usuario de 75 kg sobre la plataforma, para determinar el efecto en su velocidad al jalar una maleta rodante de distintas masas. Se observa que, por ejemplo, al arrastrar una maleta de 25 kg, la velocidad de la plataforma se reduce solamente 9.7%. En las Figuras 11 y 12, las líneas punteadas representan las tendencias lineales de los datos graficados. Además, en todos los casos se presentan las ecuaciones de dichas líneas y sus coeficientes de determinación (R2).

Maniobrabilidad. En general funcionó bien el control de rotación y traslación, dado que responde adecuadamente a los requerimientos del usuario. Se pudo conducir en forma controlada sobre banquetas, pasillos, carriles y rampas relativamente estrechas, con anchos de entre 109 y 116 cm. Además, cuando en estos había obstáculos pudo pasar por espacios de tan solo 50 cm de ancho. También la plataforma logró pasar bajo control por puertas de distintas dimensiones, la de menor ancho registrado fue de 84 cm. El espacio mínimo requerido para realizar una rotación es de 112 cm.
Estabilidad. La incorporación del soporte manual de apoyo para el usuario ayuda a darle más estabilidad. Aunque la plataforma puede conducirse sin este soporte, se observó que en la mayoría de los casos los usuarios adquieren más confianza en la conducción y se sienten más seguros cuando se incorpora este apoyo, sin embargo, agrega una masa adicional de 3 kg. La plataforma puede superar satisfactoriamente pendientes de hasta 6%, sin embargo, se observó que en el caso de pendientes mayores a 8% y cuando el usuario se inclina hacia atrás, la plataforma tiende a pivotar en sus ruedas traseras y a levantar las delanteras, lo que puede originar un accidente para el usuario. En una aceleración fuerte, el torque de los motores también contribuye a que tienda a levantarse la parte delantera de la plataforma, sin embargo, esta situación solo es riesgosa durante el ascenso de rampas con pendientes mayores a 8%, como se señaló antes.
Comodidad. Cuando se probó la plataforma en superficies planas y lisas (cemento, asfalto y loseta), como las que se presentan en el interior de un aeropuerto, no se percibieron vibraciones durante la conducción. Sin embargo, en superficies irregulares o con pequeños escalones (asfalto con grava y adocreto) la conducción resulta un poco incomoda, debido a las vibraciones que se presentan en la parte delantera de la plataforma, dado que las ruedas en esta posición son sólidas.
Discusión y análisis de resultados
Se observa que la contribución en el costo total de la plataforma de los sistemas estructural, de tracción y de energía es equilibrada, sus participaciones fluctúan entre 15% y 18%. Sin embargo, el sistema de control tiene una contribución muy alta (50%), por lo que en este se tiene la mayor oportunidad para reducir el costo de la plataforma (Figura 13). Por ejemplo, en el caso de los módulos inalámbricos que tienen un alto costo, se puede buscar otra alternativa con menos alcance y de menor costo. Además, se debe tener presente que cuando no sea indispensable el control remoto, el control alámbrico tiene la ventaja de que su costo es mucho menor, aproximadamente, una quinta parte que el del remoto. En cuanto a la contribución en la masa de la plataforma, la situación es distinta, en este caso el sistema de control tiene una contribución marginal y el sistema de tracción únicamente contribuye con 9%, en cambio, el sistema estructural y el de energía contribuyen con 89% de la masa total (Figura 13).

Se considera que debido a la utilización de materiales metálicos en la estructura de la plataforma su masa resultó relativamente alta, por ejemplo, la cubierta superior trasera puede ser totalmente de plástico, además, el chasis y otros elementos estructurales metálicos pueden construirse menos robustos. En cuanto al sistema de energía, que lo constituye básicamente el acumulador de 12 V, se puede utilizar otro más pequeño, aunque esto también reduciría su alcance, que actualmente es considerable (15 km). Otra alternativa sería utilizar baterías de mayor densidad de energía por unidad de masa (níquel-metal u óxido de plata-zinc), pero se debe considerar que estas son de mayor costo. También para mejorar la seguridad de la batería actual (ácido-plomo) puede valorarse la posibilidad de utilizar una batería de gel. Cabe señalar que cualquier reducción en la masa de la plataforma mejora su eficiencia, dado que reduce su inercia a desplazarse.
La autonomía del control remoto (2 horas) es menor que la de la batería de 12V (4.28 horas), por lo que podría ser una limitante operacional. Por lo tanto, se tiene una oportunidad de mejora en su diseño para disminuir su consumo. Se propone utilizar menos leds y de menor consumo, así como un módulo inalámbrico de menor consumo.
Con el diseño actual se recomienda enfáticamente no utilizar la plataforma en el ascenso de pendientes mayores a 8%, debido a que puede resultar riesgoso para el usuario. En diseños futuros, se tiene una oportunidad de mejora en este aspecto, ya que se debe estabilizar su centro de gravedad para dichas condiciones de operación.
Las pruebas indican que la plataforma reduce muy poco su velocidad al arrastrar una maleta rodante. Por lo que se considera que la plataforma tiene un buen desempeño en esta operación.
Aunque el alcance teórico del control remoto es de 100 metros, en la práctica no es recomendable utilizarlo a distancias mayores de 5 metros de la plataforma, con objeto de tener una visualización clara del lugar por donde se está conduciendo y evitar accidentes.
Para darle mayor versatilidad y comodidad a la plataforma, en diseños futuros, se recomienda utilizar también dos llantas neumáticas en la parte frontal, debido a que las actuales (rígidas) generan vibración para el usuario en pisos no uniformes.
Conclusiones
El prototipo de vehículo construido resultó con buenas características de maniobrabilidad y comodidad, para ser utilizado dentro de un aeropuerto, por lo que podría ayudar a los usuarios de estas instalaciones a transportarse con mayor facilidad. Puede utilizarse por personas sin limitaciones físicas o incluso, por personas con movilidad reducida. Además, la plataforma durante su operación no genera gases contaminantes.
Se puede mejorar el prototipo buscando alternativas de diseño en el módulo inalámbrico del control remoto, aligerando su estructura, y mediante alternativas en su fuente de energía.
Comparativamente contra otros desarrollos, el costo de la plataforma es competitivo. Además, a diferencia de otras propuestas, para manejarla el usuario no necesariamente tiene que estar sobre ella. El uso del control remoto le da más flexibilidad, por ejemplo, permite que un adulto pueda conducirla a distancia en forma segura, cuando esté sobre ella un adulto mayor o con movilidad reducida, o un niño(a), o incluso solo transportando equipaje. Otra ventaja es que, a diferencia de otros diseños, puede hacer alto total sin que el usuario se baje de la plataforma y sin que consuma energía en ese estado.
Con base en este prototipo, para un desarrollo futuro se plantea el diseño de una plataforma de transporte inteligente para terminales aéreas. La cual no requerirá la intervención humana en su conducción dado que esta tomará decisiones durante su recorrido. La plataforma seguirá una trayectoria predeterminada, guiada mediante un GPS, y detectará obstáculos, mediante sensores ópticos y ultrasónicos. Podrá establecer rutas alternas en caso de bloqueos en la ruta original y determinará si tiene la energía suficiente para el recorrido demandado.

