











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink
Introducción
La unidad variador de frecuencia-motor CA reduce los costos de operación en máquinas y procesos que requieren de control de velocidad. La unidad puede ser configurada para trabajar con torque constante, lo que ha permitido en ciertos procesos sustituir las unidades de variador de frecuencia con motor de CD y por consiguiente la reducción de los costos en equipamiento para el control de velocidad. Por otro lado, la integración de HMI-PLC para el control de procesos se ha incrementado en la industria y en la educación se han propuesto sistemas HMI-PLC para la enseñanza en el área de automatización.
En Aydogmus et al. (2009) se muestra un laboratorio remoto basado en sistema SCADA para el control de un motor de inducción mediante variador de frecuencia. El sistema usa señales estándar de voltaje para las entradas y salidas analógicas al PLC. El algoritmo de control considera las protecciones de sobrecarga y sobre-velocidad del motor. La HMI muestra los instrumentos virtuales para la selección de la dirección de rotación, el modo manual-automático para el lazo de control cerrado, botones de arranque y paro y un selector para prueba del sistema con el motor acoplado a carga y sin carga. Un sistema HMI-PLC-ADF se muestra en Patel et al. (2014) para el control de una máquina lavadora de botellas. Se muestra el diagrama de flujo del sistema y el algoritmo de control de nivel y presión en lenguaje diagrama a bloques. Se muestra la HMI, pero no se indica su diseño, el controlador es un PLC SiemensMR.
Una aplicación de HMI-PLC-ADF para el control de llenado de agua de un tanque, se muestra en Z., Y. y Xiaohui (2012), donde el ADF puede controlar una sola bomba de un grupo de seis en función de los interruptores de límite en el tanque. El sistema utiliza la estrategia de control en cascada, contempla modo de operación manual-automático y botones de arranque y paro. Solo se muestra el diagrama de flujo del diseño de control propuesto y se mencionan los componentes utilizados para la HMI y el PLC de la firma ModiconMR. En Li y Xu (2012) se propone un control de nivel en un tanque de almacenamiento a través del control de velocidad de un motor de CD con un sistema HMI-PLC. El artículo solo muestra las tablas de variables en la HMI y en el PLC, así como la interfaz de usuario gráfico. El sistema se basa en equipo de la marca MitsubishiMR.
En Quezada et al. (2014) se muestra el control y monitoreo de un pozo de agua potable usando tecnología HMI-PLC-ADF, las reglas de control y animación en diagramas de flujo y el algoritmo de control en diagrama escalera para el control de las variables velocidad, temperatura, concentración de cloro, flujo, presión y conductividad. Una aplicación de HMI-PLC-ADF para el control de una máquina de lana y casimir se muestra en Yunhui y Yiping (2012), donde resaltan la importancia de los ADF en cuanto a eficiencia energética, en la regulación de velocidad y frenado. Se propone un ajuste grueso de la velocidad utilizando lazo abierto y proponen el modo de lazo cerrado utilizando encoder en la retroalimentación. Sin embargo, no se muestran las HMI, ni los algoritmos de control propuestos.
La propuesta para desarrollar laboratorios educacionales a través de plantas virtuales con modelos y lógica implementada en MatlabMR y empleda con LabVIEWMR se muestra en Rodríguez et al. (2016). Se resaltan cinco características a contemplar en el diseño de las interfaces de usuario gráficas; arquitectura, distribución y navegación, color y texto, equipamiento, valores y tablas y alarmas. Se muestra un caso de estudio donde indican el modelo gráfico y parte de la programación, así como las HMI propuestas del sistema. En Pérez et al. (2006) utilizan tecnología SCADA para la enseñanza de control de procesos, donde resaltan la importancia del umbral entre el diseño de sistemas de control teórico y su implementación práctica. El caso que analizan es el control de nivel de un tanque y argumentan la realización del modelo y simulación en MatlabMR, se muestra una HMI como herramienta para generar el control con la metodología de redes neuronales, sin embargo, solo se muestran los pasos secuenciales de la generación de código en C++, texto estructurado, software de enseñanza en MatlabMR, generador de código estructurado y red neuronal.
En Selwin y Kumar (2015) se muestra un sistema HMI-PLC para el control de nivel de un tanque que alimenta a una planta hidroeléctrica, a través de dos bombas; una para extraer agua y otra para surtir agua al tanque. Proponen control en cascada de PID difusos, sin embargo no se muestra la HMI, ni el algoritmo de control, solo se describe el proceso general del sistema. Un sistema HMI-PLC con tecnología RsVIEW32MR y Allen BradleyMR, respectivamente, se muestra en Lakshmi (2012), el cual se utiliza para la validación experimental de un sistema de control en cascada basado en PDI. Solo se muestra la HMI principal del sistema y una HMI para las tendencias de las variables que comparan. En Aydogmus (2009) se muestra un sistema HMI-PLC para el control de nivel, utilizando lógica difusa para demostrar el bajo costo de la utilización de sistemas SCADA. El sistema es simulado en MatlabMR e implementado en un PLC SiemensMR, mostrando el diagrama de flujo del algoritmo de control.
Con base en lo anterior, generalmente no se muestran las reglas de diseño de las interfaces de usuario gráfico (HMI), así como los algoritmos de control implementados en el PLC. El presente artículo propone un sistema HMI-PLC-ADF-Motor CA para tres modos de control de velocidad utilizados en la industria; velocidades preestablecidas, control de lazo abierto y control de lazo cerrado. Se muestran los algoritmos de control en lenguaje diagrama escalera y las reglas de control, monitoreo y animación de las interfaces de usuario gráfico diseñadas. El sistema se integró con el software Proficy Machine EditionMR (GE, 2013) para el diseño de los algoritmos de control y Proficy HMI SCADA CimplicityMR (GE, 2001) para el diseño de las interfaces de usuario gráfico, y el hardware utilizado es un PACSystemMR (GE´s, 2016), variador de frecuencia AF-60 LP Micro DriveMR (GE, 2011) y un motor de CA trifásico BaldorMR, donde se realizaron las pruebas al sistema propuesto.
Sistema principal de control de velocidad
El sistema de control de velocidad propuesto contempla cuatro HMIs, una interfaz principal para seleccionar el modo de control de velocidad y una para cada modo de control; velocidades preestablecidas, lazo abierto y lazo cerrado. De igual forma, son cuatro algoritmos de control en diagrama escalera, uno principal y uno para cada subsistema de velocidad. El ADF se configura para operar en función del subsistema de velocidad seleccionado. Para fines de descripción, las variables en las HMIs se escriben en letra cursiva y las de los algoritmos de control en letra normal.
La Tabla 1 muestra las variables del algoritmo de control principal; la variable #ALW_ON (%S7) es una señal del sistema del PLC y significa siempre energizado; las señales de memoria %M2, %M3 y %M4 son para seleccionar el modo de control de velocidad.
Tabla 1 Variables en el algoritmo de control principal
| Variable | Direccionamiento | Descripción |
|---|---|---|
| #ALW_ON | %S7 | Siempre energizada |
| PREESTABLECIDAS | %M2 | Habilita subrutina de velocidades preestablecidas |
| L_ABIERTO | %M3 | Habilita subrutina de velocidad de lazo abierto |
| L_CERRADO | %M4 | Habilita subrutina de velocidad lazo cerrado |
La Figura 1 muestra el algoritmo de control de velocidad principal, el cual se compone de cuatro subrutinas; ACONDICIONAMIENTO siempre está activa por la variable del sistema #ALW_ON. Esta subrutina es para el escalamiento de la variable de proceso (PV, por sus siglas en inglés) o velocidad real del motor, y para el punto de consigna (SP, por sus siglas en inglés) o velocidad deseada del motor. La subrutina V_PREESTABLECIDAS es para el control de velocidades preestablecidas; L_ABIERTO para el control de velocidad de lazo abierto y L_CERRADO para el control de lazo cerrado.

HMI principal del sistema de control de velocidad
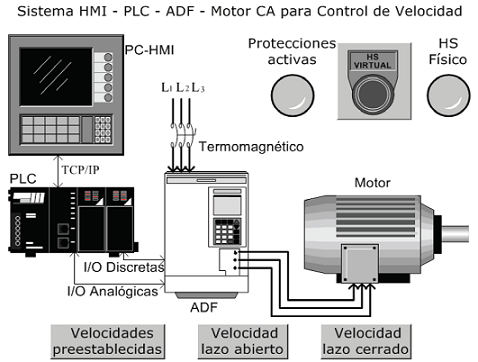
La Tabla 2 muestra las variables en la HMI principal del sistema de velocidad. La Figura 2 muestra la HMI principal para el sistema de control de velocidad, tal como se conectó en el sistema donde se realizaron las pruebas. Las HMIs (corriendo en una computadora personal) se comunican vía protocolo Ethernet con el PLC, el cual recibe y envía señales de tipo discreto y analógico de las variables de campo, incluyendo al ADF, que está conectado al motor trifásico de CA.
Tabla 2 Variables en la HMI principal
| Variable en HMI | Descripción |
|---|---|
| HS Físico | Alarma virtual del estado de paro de emergencia real HS_F (%I1) |
| Protecciones activas | Alarma virtual del estado de las protecciones del sistema PROTECCIONES (%I2) |
| HS VIRTUAL | Paro de emergencia virtual (paro por software), controla el estado de HS_V (%M1) |
| Velocidades preestablecidas | Botón para seleccionar el modo de control de velocidades preestablecidas |
| Velocidad lazo abierto | Botón para seleccionar el modo de control de velocidad de lazo abierto |
| Velocidad lazo cerrado | Botón para seleccionar el modo de control de velocidad de lazo cerrado |
Línea de control para seguridad del sistema de velocidad
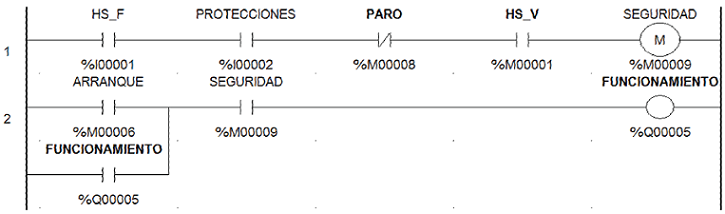
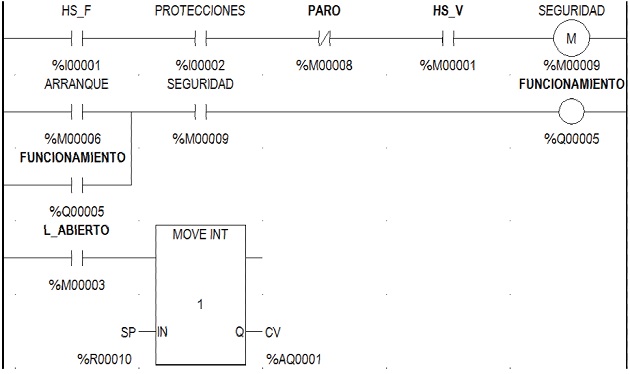
Todo sistema de control debe contemplar la línea de seguridad para protección de las personas y de las propias máquinas. La Figura 3 muestra en la línea 1 las variables de seguridad del sistema de velocidad; HS_F (%I1) botón retentivo de paro de emergencia; PROTECCIONES (%I2) que puede ser: sobrevoltaje, sobrecorriente, temperatura en devanados o rodamientos, entre otros; PARO (%M8) botón virtual y HS_V (%M1) paro de emergencia virtual, los cuales son manipulados desde las HMIs (por software). Esta línea de control de seguridad también permite detener el motor en caso de falla o pérdida de comunicación entre las HMIs y el PLC, así como en caso de falla de energía eléctrica en el sistema, ya que los contactos son normalmente abiertos de las señales HS_F (%I1) y PROTECCIONES (%I2). Cuando las condiciones de seguridad (HS_F=1; PROTECCIONES=1; PARO=0; HS_V=1) se cumplen, entonces se energiza la bobina SEGURIDAD (%M9) y en consecuencia su contacto normalmente abierto, en la línea 2 se cierra, dando las condiciones para poder energizar la bobina FUNCIONAMIENTO (%Q5).
Las tres subrutinas V_PREESTABLECIDAS, LAZO_ABIERTO y LAZO_CERRADO contemplan este algoritmo para protección del sistema independientemente del modo de control de velocidad.
Reglas de control y monitoreo en el sistema de control principal
Las HMIs se configuran para que su operación pueda ser con el ratón (botón izquierdo). Se usará el evento clic para indicar la acción hacia un elemento virtual. Las reglas de control y monitoreo para el control de velocidad principal son:
Si se da clic en el botón HS VIRTUAL, entonces la variable HS_V (%M1) cambia de estado, es decir, si HS_V = 0 entonces cambia a 1, y si HS_V = 1 entonces cambia a 0. En función del estado de la variable, el círculo es de color rojo cuando HS_V = 0 y es de color verde cuando HS_V = 1.
Si se da clic en el botón Velocidades preestablecidas, entonces la variable PREESTABLECIDAS (%M2) se coloca a uno y las variables L_ABIERTO (%M3) y L_CERRADO (%M4) se colocan a cero. Además, la HMI principal se cierra y se abre la HMI para el modo de control de velocidades preestablecidas.
La lógica es similar para los botones de Velocidad lazo abierto y Velocidad lazo cerrado, colocando a uno L_ABIERTO (%M3) y L_CERRADO (%M4) respectivamente, y colocando a cero las otras dos variables.
Si la variable HS_F (%I1) = 0, entonces el texto HS Físico es visible y la alarma luminosa (círculo) se pone de color rojo.
Si la variable HS_F (%I1) = 1, entonces el texto HS Físico y la alarma luminosa no son visibles en ninguna de las HMIs.
Si la variable PROTECCIONES (%I2) = 1, entonces la alarma luminosa se muestra en color verde, de lo contrario es de color rojo.
Con las reglas lógicas arriba descritas, solo un modo de control de velocidad puede estar en funcionamiento a la vez.
Escalamiento de señales SP y PV a la variable velocidad
Para las señales SP y PV, se realiza un escalamiento para la variable velocidad en un intervalo de 0 a 1800 rpm. El punto de consigna se direcciona a un registro de memoria y la variable de proceso a una entrada analógica, ambas son de tipo entero a 16 bits, por lo que su intervalo de trabajo en formato decimal es de 32768 (215). La variable SP se manipula desde las HMIs para el control de velocidad de lazo abierto y de lazo cerrado. Para la variable PV se utiliza una señal estándar de control de 4 a 20 mA. Ambas señales se condicionan a un máximo valor de 31500 y se dividen entre 17.5 en las HMIs para obtener como máximo valor de velocidad 1800 rpm. La Tabla 3 muestra el escalamiento respectivo para la PV y SP, y la Tabla 4 muestra las variables y direccionamiento para el acondicionamiento de PV.
Tabla 3 Escalamiento para las señales SP y PV
| Decimal | SP (rpm) | PV (mA) | PV (rpm) |
|---|---|---|---|
| 0 | 0 | 4 | 0 |
| 7875 | 450 | 8 | 450 |
| 15750 | 900 | 12 | 900 |
| 23625 | 1350 | 16 | 1350 |
| 31500 | 1800 | 20 | 1800 |
Tabla 4 Variables en el algoritmo de control de escalamiento de la señal PV
| Variable | Direccionamiento | Descripción |
|---|---|---|
| ENT_ANALOGICA | %AI15 | Entrada analógica de la VP |
| AUX_VEL_REAL | %R1 | Registro auxiliar para el escalamiento en las HMIs |
| AUX1 | %M10 | Memoria auxiliar para el límite inferior de PV |
| AUX2 | %M11 | Memoria auxiliar para el límite superior de PV |
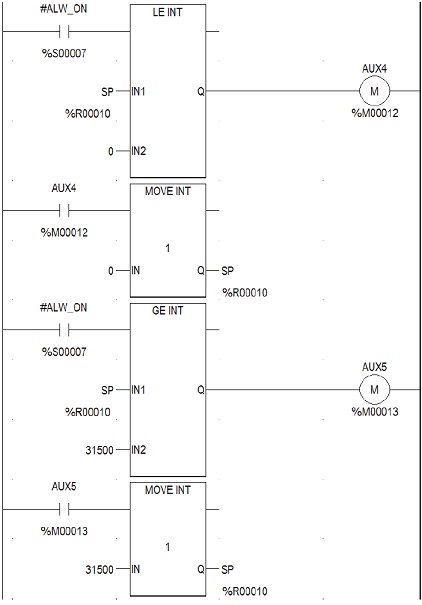
La Figura 4 muestra el algoritmo de control para el escalamiento de la variable PV. El valor de la señal analógica ENT_ANALOGICA (%AI15) correspondiente a la velocidad real se mueve de forma continua al registro AUX_VEL_REAL (%R1), el cual se divide entre 17.5 en las HMIs para mostrar la velocidad real del motor en el intervalo de 0 a 1800 rpm. Los bloques LE INT y GE INT son para limitar la PV y no exceda el límite inferior de 0 y el límite superior de 31500.

Las reglas lógicas de los algoritmos de acondicionamiento para PV son:
Si PV (%AI15) es menor o igual que cero, entonces AUX1 (%M10) = 1 y AUX_VEL_REAL (%R1) = 0.
Si PV (%AI15) es mayor o igual que 31500, entonces AUX2 (%M11) = 1 y AUX_VEL_REAL (%R1) = 31500.
De igual forma, la Tabla 5 muestra las variables del escalamiento para el SP, y la Figura 5 el algoritmo de control, donde el SP (%R10) se manipula desde las HMIs de velocidad de lazo abierto y de lazo cerrado. En los indicadores del SP se realiza la división entre 17.5 para mostrar la variable velocidad en el intervalo de 0 a 1800 rpm.
Tabla 5 Variables en el algoritmo de control de escalamiento de la señal SP
| Variable | Direccionamiento | Descripción |
|---|---|---|
| SP | %R10 | Registro del SP |
| AUX4 | %M12 | Memoria auxiliar para el límite inferior de SP |
| AUX5 | %M13 | Memoria auxiliar para el límite superior de SP |
Las reglas lógicas de los algoritmos de acondicionamiento para SP son:
Controlador de frecuencia variable
El diagrama general de funcionamiento del ADF utilizado en el presente trabajo se muestra en la Figura 6, en la parte superior se tiene el rectificador y el oscilador controlado por el modo de conmutación (switch mode), el cual está en función de la señal de comando, que puede ser analógica (mA o V) o entradas discretas, como puede observarse en la parte media e inferior de lado izquierdo. Para el modo de control de velocidades preestablecidas se utiliza el comando discreto (entradas digitales 27, 29 y 33), para el control de lazo abierto y lazo cerrado se utiliza el comando analógico (entrada analógica 53), y para la visualización de la velocidad real y como retroalimentación en modo de control de lazo cerrado se usa la señal de salida analógica del pin 42. En el Anexo 1 se muestra la configuración del ADF.

Control de velocidades preestablecidas
El modo de control de velocidades preestablecidas se emplea en la industria para procesos que requieren de diferentes velocidades conocidas. La configuración en los ADF se realiza mediante la combinación de tres entradas digitales, con lo cual se pueden configurar hasta siete velocidades preestablecidas en función de cada combinación posible de estos tres contactos, considerando que la combinación de todos los circuitos abiertos es velocidad cero del sistema. También se tiene un circuito para el arranque y sentido de giro del motor (entradas digitales 18 y 19, Figura 6).
Es importante resaltar que el diseño de las HMIs deben reducir los algoritmos de control en los PLC para el control de procesos o máquinas, al poder manipular desde la HMI las señales de entrada y salida físicas discretas y analógicas, así como a las de memoria, además de soportar lógica de control y de animación.
El algoritmo de control de la Figura 3 es suficiente para el modo de control de velocidades preestablecidas, ya que el accionamiento de las bobinas que cierran los circuitos con el ADF se controlan desde la HMI. La señal FUNCIONAMIENTO (%Q5) en la Figura 3 está en función de las protecciones y la variable ARRANQUE (%M6) es para poner en operación el motor, la cual se manipula desde las HMIs.
HMI para el control de velocidades preestablecidas
La Tabla 6 muestra las variables extras en la HMI para el modo de velocidades preestablecidas.
Tabla 6 Variables en HMI para el modo de control de velocidades preestablecidas
| Variable en HMI | Descripción |
|---|---|
| Izquierda | Indicador tipo texto para indicar el giro del motor hacia la izquierda |
| Derecha | Indicador tipo texto para indicar el giro del motor hacia la derecha |
| Selector virtual | Selector del sentido de giro del motor |
| Arranque | Botón de funcionamiento del motor |
| Paro | Botón de paro del motor |
| Velocidad 1 - 7 | Botones de selección de velocidad predeterminada |
| PV | Indicador numérico de la PV |
| HMI principal | Botón para regresar a la HMI principal |
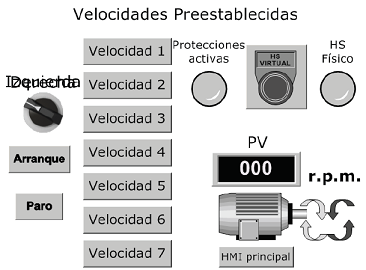
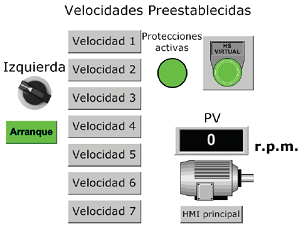
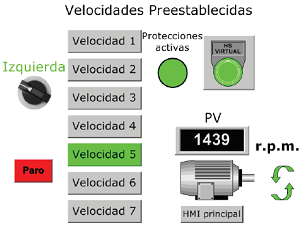
La Figura 7 muestra la HMI para el control de velocidades preestablecidas que contienen las variables de protección y alarma generales. Las variables de texto Izquierda y Derecha están sobrepuestas e indican el sentido de giro del motor, su visibilidad está en función del selector virtual. La HMI muestra los botones de Arranque y Paro, los cuales tienen el comportamiento de botones instantáneos, además muestra siete botones para seleccionar las velocidades preestablecidas en el ADF. También muestra un indicador digital para la velocidad real, así como el botón HMI principal para ir a la respectiva interfaz.
Las reglas de control y monitoreo para el modo de velocidades preestablecidas son:
Si se da clic sobre el selector virtual, este cambia de izquierda a derecha o viceversa.
Si el selector virtual está a la izquierda, entonces el texto Izquierda es visible y la señal de Sentido de giro (%Q6) se coloca a cero.
Si el selector virtual está a la derecha, entonces el texto Derecha es visible y la señal de Sentido de giro (%Q6) se coloca a uno.
Si se da clic (presiona el botón izquierdo del ratón) en el botón de Arranque, entonces la variable ARRANQUE (%M6) se coloca a uno, y cuando se deja de presionar, la señal ARRANQUE se coloca a cero.
Si se da clic en el botón de Paro, entonces la variable PARO (%M8) se coloca a uno, y cuando se deja de presionar la señal PARO se coloca a cero.
Si la variable FUNCIONAMINTO (%Q5) = 1, entonces el selector virtual y el botón de Arranque no son visibles.
Si se da clic en alguno de los botones de Velocidad 1 - 7, entonces las señales de salida física %Q2, %Q3 y %Q4 se colocan al valor binario correspondiente, por ejemplo, si se da clic en el botón de la Velocidad 5, entonces %Q2 = 1, %Q3 = 0 y %Q4 = 1.
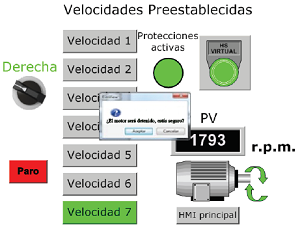
Si se da clic en el botón HMI principal, entonces se abre una ventana de precaución con la pregunta ¿El motor será detenido, estás seguro?; si se presiona el botón de Cancelar, entonces la ventana de precaución se cierra y el modo de control de velocidades preestablecidas se mantiene en las mismas condiciones de funcionamiento; si se presiona Aceptar, entonces la ventana de precaución y la HMI de velocidades preestablecidas se cierran, las señales %Q2, %Q3, %Q4 y %Q5 se colocan a cero y se abre la HMI principal.
Control de velocidad de lazo abierto
El modo de control de velocidad de lazo abierto se utiliza en procesos donde se requiere aumentar o disminuir la velocidad de forma continua, lo cual se logra manipulando una señal de salida analógica de 4 a 20 mA desde el PLC al ADF, equivalente al intervalo de velocidad del motor.
La Figura 8 muestra el algoritmo de control para velocidad de lazo abierto, donde puede observarse que solo se agregó un bloque MOVE INT para mover la información del SP (%R10) a la variable de control (CV) correspondiente a la señal de salida analógica %AQ7, la cual está conectada al ADF. El bloque MOVE INT es habilitado por la señal L_ABIERTO (%M3), la cual se activa cuando en la HMI principal se presiona el botón de Velocidad de lazo abierto.
HMI para control de velocidad de lazo abierto
La Tabla 7 muestra las variables que se agregan para el control de velocidad de lazo abierto.
Tabla 7 Variables para el modo de control de velocidad de lazo abierto
| Variable en HMI | Descripción |
|---|---|
| Botón subir SP | Incrementa el valor en el registro %R10 |
| Botón bajar SP | Decrementa el valor en el registro %R10 |
| CV | Variable controlada (%AQ1) |
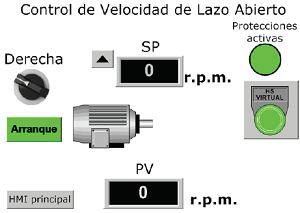
La Figura 9 muestra la HMI diseñada para el control de velocidad de lazo abierto, donde se pueden observar dos botones para incremento y decremento de la variable SP, los cuales están configurados para saltos de 100 rpm. La HMI también tiene un indicador para mostrar la variable SP.

Solo se describen las nuevas reglas de control o monitoreo para el control de velocidad de lazo abierto:
Si se da clic en el botón de incremento (flecha superior), entonces el valor de SP se incrementa en 100 rpm. De igual forma, si se da clic en el botón de decremento (flecha inferior), entonces el valor de SP se reduce en 100 rpm.
Si el valor de la variable SP es cero, entonces el botón de incremento no es visible.
Si el valor de la variable SP es 1800, entonces el botón de decremento no es visible.
En función del escalamiento descrito arriba, la variable SP no puede tener valores negativos, ni valores positivos mayores a 1800 rpm.
Sistema de control de velocidad de lazo cerrado
El modo de control de velocidad de lazo cerrado se utiliza en procesos continuos que usan la variable de proceso como retroalimentación para el control automático.
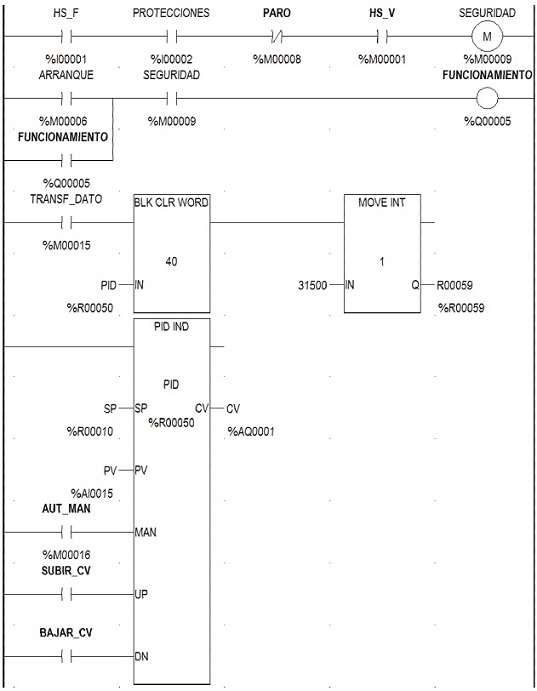
La Figura 10 muestra el algoritmo de control para el modo de velocidad de lazo cerrado. El bloque BLK CLR WORD se emplea para borrar los 40 registros de memoria de 16 bits que utilizan el bloque PID IND, que inicia en el registro %R50, por lo tanto, este registro es la entrada del bloque BLK CLR WORD. El bloque MOVE INT se utiliza para colocar el límite superior de 31500 de la CV del PID, que es: \#registro de referencia + 9 (%R59). La variable SP (%R10) se manipula desde la HMI, la señal PV (%AI15) viene del ADF como señal analógica de retroalimentación, el contacto AUT_MAN es para seleccionar el modo de operación del controlador PID, y las variables SUBIR_CV y BAJAR_CV son para el control de CV (%AQ1) en modo manual. La Ecuación 1 es del controlador PID IND (GE, 2013) utilizado.
HMI para el control de velocidad de lazo cerrado
La Tabla 8 muestra las variables extras utilizadas para el control de velocidad de lazo cerrado, todas ellas únicamente pueden ser manipuladas en modo manual del controlador PID, a excepción del selector virtual para selección del modo de control.
Tabla 8 Variables para el modo de control de velocidad de lazo cerrado
| Variable en HMI | Descripción |
|---|---|
| Botón subir CV | Incrementa el valor de CV |
| Botón bajar CV | Decrementa el valor de CV |
| Kp | Asigna valor a la ganancia proporcional |
| Ki | Asigna valor a la ganancia integral |
| Kd | Asigna valor a la ganancia derivativa |
| Selector virtual (centro de HMI) | Para seleccionar el modo del controlador PID |
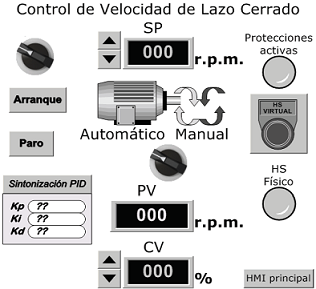
La Figura 11 muestra la HMI para el control de velocidad de lazo cerrado. El modo Automático o Manual del controlador PID se realiza a través de un selector virtual al centro de la HMI y está direccionado a la variable AUT_MAN (%M16) en el algoritmo. La HMI muestra una ventana auxiliar para la sintonización del PID, es decir, enviar el valor de las constantes Kp, Ki y Kd a los registros: #referencia + 5; + 7; + 6, respectivamente.
Para la HMI de velocidad de lazo cerrado se adicionan las siguientes reglas de control y monitoreo:
Si se da clic en el selector Automático-Manual, entonces este gira 90 grados a la izquierda o derecha en función de su posición actual.
Si el selector Automático-Manual está a la izquierda, entonces la variable de texto Automático es visible, la variable de texto Manual no es visible, además, la señal AUT_MAN (%M16) se coloca a cero. También en estas condiciones la ventana de sintonización del PID y los botones de subir y bajar la CV no son visibles.
Si el selector Automático-Manual está a la derecha, entonces la variable de texto Automático no es visible. La variable de texto Manual, la ventana de sintonización del PID y los botones de subir y bajar la CV, son visibles. La señal AUT_MAN (%M16) se coloca a uno.
La siguiente sección muestra la funcionalidad del sistema de control de velocidad propuesto.
Pruebas del sistema de control de velocidad
La Figura 12 muestra el banco de trabajo donde se integró y se realizaron las pruebas al sistema de control de velocidad HMI-PLC-ADF-Motor CA.

La Figura 13 muestra la HMI principal con las protecciones físicas y virtuales activadas de color rojo. La Figura 14 muestra la HMI principal en condiciones de funcionamiento; las variables Protecciones activas y HS_VIRTUAL son de color verde y la variable HS Físico no está visible.


La Figura 15 muestra la HMI de velocidades preestablecidas, el selector virtual está hacia la Izquierda, el botón Arranque es visible y en color verde, el botón de Paro no está visible, no está ninguna velocidad seleccionada. La Figura 16 muestra el sistema operando con giro hacia la Izquierda con la velocidad cinco preestablecida, el botón correspondiente está en verde y el indicador de velocidad muestra 1439 rpm. El botón de Arranque no está visible y el botón de Paro está visible y de color rojo.
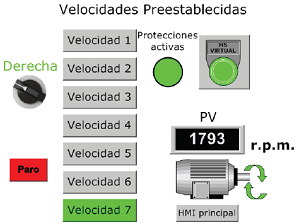
La Figura 17 muestra el motor en rotación hacia la Derecha con una velocidad real de 1793 rpm, con el botón de la séptima velocidad en color verde. La Figura 18 muestra la ventana auxiliar de precaución, acción de dar clic en el botón HMI principal.
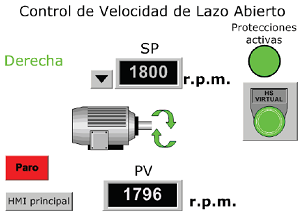
La Figura 19 muestra la HMI para el control de velocidad de lazo abierto en condiciones de funcionamiento, la variable SP = 0 y por consiguiente el botón de decrementar no está visible. La Figura 20 muestra la variable SP en su máximo valor (1800 rpm) y por lo tanto no es visible el botón de incrementar dicha variable. La velocidad real PV muestra 1796 rpm. La Figura 21 muestra el valor de SP en 600 rpm, ambos botones de incremento o decremento de esta señal son visibles.

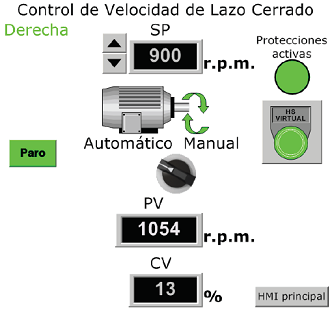
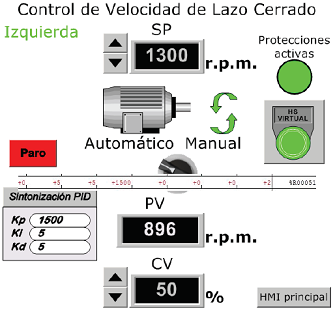
Las Figuras 22 y 23 muestran el modo de control de velocidad de lazo cerrado operando. En la Figura 22 se muestra el sistema en Automático, con las variables: SP = 900 rpm, PV = 1054 rpm y CV = 13%. Por otro lado, en la Figura 23 se observa el sistema en modo Manual, lo que permite que la ventana de sintonización del PID sea visible, la cual tiene valores para las constantes Kp=1500, Ki=5 y Kd=5, que se enviaron a los registros 55%, 56% y 57%, respectivamente. En esta figura las variables SP = 1300 rpm, PV = 896 rpm y CV = 50%, así como los botones de manipulación de la variable CV son visibles. La diferencia entre el SP y PV que se observa, se debe a los valores de las ganancias que se enviaron al PID, ya que la intensión de la ventana auxiliar es mostrar que desde la HMI de este modo de control, se pueden agregar los datos de sintonización calculados o a prueba y error.
Conclusiones
El diseño de HMI debe incluir el mayor código de lógica del proyecto, y así reducir el código de los algoritmos de control en los PLC, lo cual hace más eficiente el tiempo de barrido. De igual forma, las reglas lógicas de control, monitoreo y animación en las HMI deben generar un diseño seguro y amigable con los operadores de los sistemas.
Los algoritmos de control en el PLC siempre deben-contener el interloking de seguridad del proceso o máquina para garantizar el paro del sistema en caso de falla en la comunicación entre la computadora donde están las HMI y el PLC.
Se presentan tres modos de control de velocidad utilizados en la industria, indicando las reglas lógicas de control, monitoreo y animación en el diseño de las HMI, así como los algoritmos de control para cada modo. En función de la naturaleza de los procesos o máquinas el sistema HMI-PLC-ADF-Motor CA debe ser configurado.
El presente trabajo propone tres modos de control de velocidad, desde el diseño de las HMI y el desarrollo de los algoritmos en diagrama escalera, lo cual será base para cursos virtuales de la variable respectiva.

