











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Gran responsabilidad de la seguridad del Sistema Eléctrico de Potencia (SEP) se deja a los operadores de los Centros de Control; ellos ejecutan las maniobras para ajustar el despacho de generación y los perfiles de voltaje. Pese a que la mayor parte del tiempo el SEP prevalece en un estado normal de operación, en tiempo real se alimentan aplicaciones o programas de computadora que se ocupan de detectar condiciones de riesgo, sea producto de cambios de comportamiento dinámico de la carga, de nuevos flujos de potencia, maniobras de mantenimiento, etcétera.
Por la gran dimensión y tecnologías utilizadas en los SEP el tiempo de arribo de datos es cambiante o incluso en ocasiones se pierde la comunicación. Las aplicaciones de tiempo real deben considerar esa situación en su proceso para seguir ofreciendo un dato confiable.
Con una arquitectura tradicional de sistema de Supervisión, Control y Adquisición de Datos (SCADA) es común acumular tiempos del orden de ½ a 2 segundos, previo a presentar una imagen visual o señalizar alguna violación de límites operativos (Gaushell y Darlington, 1987). Ese tiempo se convierte en una restricción tecnológica de los SCADA tradicionales, que además solo manejan magnitudes del voltaje y de las corrientes por las líneas. Esos dos datos directamente entran a una etapa de cálculo para despejar otras variables de interés, por lo general mediante un programa denominado de estimación de estados (Schweppe and Wildes, 1970; Phadke et al., 1986).
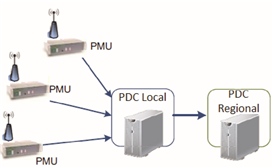
A mediados de los 80’s se dieron a conocer conceptos y aplicaciones con Sincrofasores (Phadke, 2002). El proceso conocido para conseguir un fasor en un medidor digital donde se añade una etapa para asignar un tiempo global proveniente del GPS (Global Positioning System). Entonces los registros provenientes de la subestación manejan información de tiempo-espacio de forma sincronizada, lo cual permite trasladarles manteniendo una referencia común y prescindiendo de los retrasos en la transmisión de datos (De la Ree et al., 2010; Kenneth, 2013). La Figura 1 muestra el esquema típico para remitir registros desde Unidades de Medición Fasorial (PMU) hasta un algoritmo concentrador, sea en el nivel de subestación o a otro nivel superior.
La presencia masiva de equipos PMU permite a las empresas buscar alternativas de seguimiento al SEP, pero ahora con registros tomados en el mismo instante. El nuevo Sistema de Monitoreo de Área Amplia (WAMS) debe adaptarse para aprovechar la mayor cantidad de datos, aumentando por tanto la resolución y la posibilidad de probar nuevos métodos y aplicaciones (Anjia et al., 2005; Phadke y De Moraes, 2008).
En este trabajo se describe una estructura de WAMS implementado para monitorear una red de prueba a escala de laboratorio. Se ejecutan rutinas sobre una plataforma de simulación tiempo real que hace las veces de adquisición de señales analógicas, procesamiento de muestras y visualización de registros. En las secciones posteriores se presentan las etapas para la implementación del WAMS, partiendo de describir PMU virtuales, simular la transmisión de información, y programar los concentradores de datos fasoriales (PDC). Todo esto termina disponible a usuarios a través de una interfaz de visualización.
Sistema de monitoreo de área amplia en tiempo real
Un WAMS es el conjunto de instrumentos-comunicaciones alimentando las aplicaciones con sincrofasores. La tarea inicia con instalar PMU en las subestaciones y trasmitir paquetes de datos digitalizados hasta un elemento concentrador. Las arquitecturas de WAMS pueden ser distintas, sea: centralizada, descentralizada o distribuida (Gore y Kande, 2015).
En estas variantes de implementación coinciden en cuanto a la presencia de tres etapas generales:
La primera involucra elementos para colectar información a nivel de subestación con las mediciones primarias.
En la segunda participan los sistemas de comunicación enlazados por canales dedicados, en este caso con lenguaje en forma de código.
La tercera etapa contiene el software de las aplicaciones, que en este trabajo lo referimos como PDC y solo se dedica a la visualización de los voltajes nodales y de la potencia activa de una red eléctrica de prueba a escala de laboratorio.
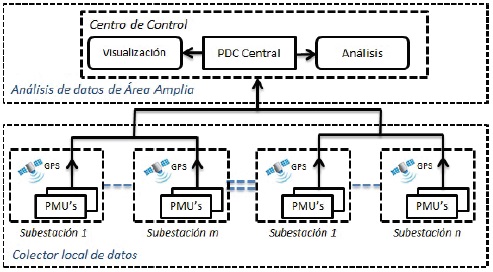
La estructura funcional de los WAMS sin importar su arquitectura se puede dividir para su estudio en tres secciones: adquisición, transmisión y manejo de datos, tal como se ilustra en la Figura 2, donde la comunicación es unidireccional entre las PMU y los PDC locales, y puede ser bidireccional entre estos PDC locales y su PDC central. Para el caso de aplicación que se presenta en esta investigación se escogió una arquitectura de tipo centraliza donde los datos proceden desde las PMU, pasan por un canal de comunicaciones y llegan hasta un único PDC Central en el cual se ordena toda la información recabada mediante las etiquetas de tiempo, el arreglo de esta arquitectura en específico se muestra en la Figura 3, para este caso el flujo de información es unidireccional desde las PMU hasta el PDC central.

Adquisición de datos
Las PMU son las encargadas de realizar la adquisición de la información debido a que se encuentran instaladas en plantas de generación y subestaciones, realizan la medición del voltaje nodal y la corriente de línea, entregando su magnitud y ángulo con una estampa de tiempo global; dicha medición puede ser por fase (a b c) o por secuencias (0 + -) a una velocidad de 10 y hasta 60 paquetes de datos enviados por segundo (IEEE Standard C37.118.1-2011), en este caso se eligió el envío de 20 paquetes de datos.
Para realizar su función las PMU necesitan las mediciones de voltaje provenientes del transformador de potencial (TP) y las de corriente a través del transformador de corriente (TC), estos elementos acondicionan en magnitud la señal analógica que entra al PMU, además un GPS para obtener el dato de etiqueta de tiempo que se agregará a la medición y, por ultimo, un canal de comunicación para el envió de la información. En la Figura 4 se presenta un esquema de este arreglo entre los transductores, el GPS, la PMU y el canal de comunicación.

Concepto de medición fasorial sincronizada
Actualmente se utiliza un procesamiento digital de señales para poder obtener las variables del SEP en su forma fasorial, que se conforma de diferentes pasos. Primero, un filtro analógico antialiasing se usa para limitar el ancho de banda de la señal de entrada para que sea compatible con la frecuencia seleccionada para la conversión analógica-digital, basado en el Teorema de Nyquist.
A la salida del convertidor analógico-digital se tiene una señal digital con muestras equiespaciadas, en este caso, los datos digitalizados se filtran aplicándoles la Transformada Discreta de Fourier (DFT) para obtener una señal muestreada en frecuencia (Phadke et al., 1983; 1994).
La representación de la DFT mostrada en (1), se considera que es una señal finita con un periodo de 2π, con un intervalo de muestreo de 2π/N, una revisión detallada de la formulación se presenta en (Phadke et al., 1983).
Una vez obtenidos los valores fasoriales de cada fase de voltaje o corriente mediante la DFT, se aplica la transformación de componentes simétricas dada por el Teorema de Fortescue, mostrado en (2), esto para obtener los datos de las secuencias cero, positiva y negativa, de las señales de voltaje y/o corriente.
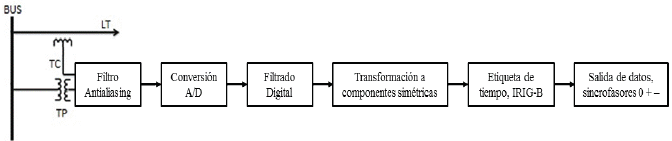
Hasta este punto se tiene un fasor, ahora se procede a utilizar el dato de tiempo dado por el GPS, el cual se agregará al fasor en el formato IRIG-B para conocer el instante preciso en el que se realizó la medición, la salida de datos con etiqueta de tiempo se le denomina Sincrofasor cumpliendo el IEEE Standard C37.118.1-2011 (2011), presentan en extenso las pruebas de validación que se deben seguir para la implementación de una PMU. La metodología para obtener el Sincrofasor, basado en el procesamiento de señales que se mencionó anteriormente y bajo las condiciones establecidas en IEEE Standard C37.118.1-2011, se ejemplifica con un diagrama de bloques como el que se muestra en la Figura 5.
Las PMU disponibles en el mercado tienen la capacidad de realizar mediciones en tiempo real a una tasa por debajo de los 20ms, su respuesta se da en sub-múltiplos de la frecuencia fundamental del sistema, para una frecuencia de 60Hz, pueden entregar 10, 12, 15, 20, 30 o hasta 60 datos por segundo, tal como se indica en IEEE Standard C37.118.1-2011.
Para este trabajo se implementó un PMU en la plataforma de simulación tiempo real OPAL-RT®, que tiene 16 canales de entrada analógicos para ingreso de señales con una magnitud entre 10V y 20mA; en la implementación se propone un filtro antialiasing basado en una función de Butterworth con una frecuencia de corte de 900Hz, un convertidor analógico-digital con una tasa de muestreo de 0.5ms, lo cual genera 32 muestras por ciclo de frecuencia fundamental de 60Hz, cabe resaltar que se acota la duración del ciclo a 16ms; para la obtención del fasor en el filtrado digital se utiliza una ventana de un ciclo de frecuencia fundamental, la entrega de datos al exterior del dispositivo se considera a una taza de 20 paquetes por segundo; se calcula un fasor para cada ciclo y solo se envía una tercera parte de la información disponible, para el envío del paquete de datos se considera el promedio de los 3 fasores calculados.
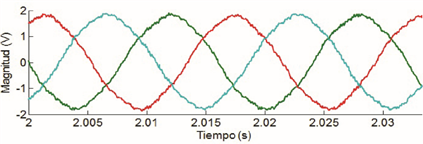
Se presenta en la Figura 6 el registro de las señales adquiridas desde un sistema físico, las cuales solo han pasado por el proceso de atenuación para ingreso a la DAQ, hasta este punto no se le han incluido los procedimientos de filtrado de señal mencionados en párrafos anteriores. Dicho registro concierne a una condición de estado estable, por lo cual no tiene cambios en magnitud o fase para un registro a largo plazo.
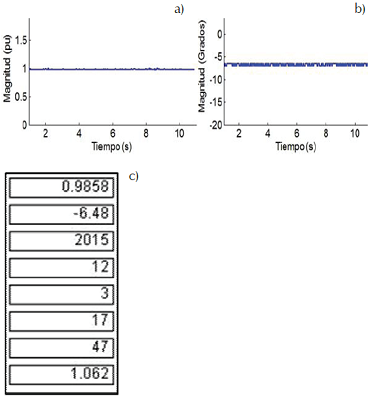
Posteriormente, se realiza la tarea de procesamiento de la información contenida en la Figura 6 y con un registro de mayor duración en tiempo; dicho procesamiento tiene como finalidad obtener el fasor corres- pondiente a la secuencia positiva tanto en magnitud y como ángulo para dicha señal, se muestra en las Figuras 7a y 7b, respectivamente. Esta información se acondicionará en el formato de sincrofasor (Figura 7c), para el envío al punto concentrador de información, en dicho formato se presenta la estampa de tiempo referente a la captura de un Sincrofasor específico. Para la Figura 7c la primera fila concierne a la magnitud del fasor de secuencia positiva, la segunda al ángulo de fase de la secuencia positiva, ambos datos obtenidos del procesamiento de la información de la Figura 6 y presentados en la Figura 7a y 7b como un registro de largo plazo. La tercera fila es el año, la cuarta el mes, la quinta la hora, la sexta minutos y la séptima los segundos con una resolución hasta milésimas de segundo.
Transmisión de datos
La transmisión de datos se realiza por canales de comunicación de diversos tipos, no necesariamente a través de internet, y esta comunicación debe cumplir con diversos requerimientos, los cuales se han estandarizado y se pueden revisar a detalle en (IEEE Standard C37.118.2-2011).
Entre los requerimientos a revisar se tienen la tasa de envió de datos que para el caso de un sistema con frecuencia de 60Hz puede ser de 10, 12, 15, 20, 30 o 60 paquetes de datos por segundo.
Los protocolos comunes para él envió de dichos paquetes de información son el TCP (Protocolo de Control de Transmisión), UDP (Protocolo de Usuario basado en Datagramas), DNP (Protocolo de Red Distribuida) y IEC810-5 (Comisión Electrotécnica Internacional).
El ancho de banda requerido depende de la cantidad de paquete de datos a enviar. A continuación en la Tabla 1 se presenta la estimación del ancho de banda basado en la Tabla C.1 presentada en la referencia IEEE Standard C37.118.2-2011.
Tabla 1 Estimación de los requerimientos de ancho de banda para transmisión de datos desde PMU a PDC
| Velocidad de transmisión en bits por segundo (bps), por ejemplo mensajes utilizando UDP / IP sobre Ethernet | |||||||
|---|---|---|---|---|---|---|---|
| PMU tasa de envió en paquetes por segundo | 10 | 12 | 15 | 25 | 30 | 50 | 60 |
| Contenido del mensaje: 2 fasores en números enteros | 6720 | 8064 | 10800 | 16800 | 20160 | 33600 | 40320 |
| Contenido del mensaje: 2 fasores en punto flotante | 7680 | 9216 | 11520 | 19200 | 23040 | 38400 | 46080 |
| Contenido del mensaje: 12 fasores en números enteros | 9920 | 11904 | 14880 | 24800 | 29760 | 49600 | 59520 |
| Contenido del mensaje: 12 fasores, 2 datos analógicos, 2 digitales y todos en números enteros | 10560 | 12762 | 15840 | 26400 | 31680 | 52800 | 63360 |
Por otro lado, en Dengjun (2006) se plantea el proceso de comunicación basado en 3 capas, de las cuales a continuación se presenta una breve reseña:
La primera, consiste en las unidades de medición, de conmutación y de control.
La segunda, reside en las unidades de comunicación tales como módems y routers.
La tercera, es el medio de comunicación que puede consistir en fibra óptica, microondas o satélite, teniendo en cuenta el ancho de banda, robustez y el tiempo de retardo del canal.
La transmisión de información produce un retardo o latencia entre el envío y recepción de datos, dicho retardo se caracteriza para algunos canales, como lo presentan en Naduvathuparambil et al. (2002), entre los que tenemos: Cables de fibra óptica y señales microondas de 100-150ms, onda portadora por línea de alta tensión de 150-350ms, línea telefónica de 200-300ms y vía Satélite 500-700ms.
Para el presente trabajo se incluyó un retardo lineal por retención de muestras en la transmisión de información entre las PMU y el PDC, dicho retardo se establece en un rango aleatorio de 100-150ms debido a que se considera una transmisión por fibra óptica solo teniendo en cuenta que sea un múltiplo de la adquisición de datos de la plataforma de simulación, en esta caso 50μs.
Manejo de datos
Esta función dentro del WAMS se complementa por el Concentrador de Datos Fasoriales (PDC), que incluye: colector de datos, filtrado de datos repetidos, procesamiento de datos y re-trasmisión de los datos recabados.
El PDC debe tener la habilidad de tolerar datos de mala calidad e incluso errores o pérdidas de la red de transmisión de información, lo que puede ser desde un nodo o de diferentes. Puede además realizar funciones como la de registrador de disturbios, estimador de estados, identificación de parámetros, entre otras (Buttayak et al., 2012).
El concentrador de datos usualmente consiste en tres partes: plataforma de recepción de datos, registro de datos históricos e interfaz gráfica para visualización de información (IEEE Standard C37.244-.2013).
Concentrador de datos fasoriales (PDC)
Un PDC consiste en 3 partes, las cuales se describen en IEEE Standard C37.244-.2013, y se pueden resumir bajo la siguiente propuesta: la primera es la unidad central que consta de una computadora que recibe y colecta los datos desde las PMU, donde el software de aplicación en el PDC se encarga de administrar los datos, esto es, el acomodo de los mismos basados en sus etiquetas de tiempo, la Figura 8 muestra el esquema de esta unidad central y su función. La segunda es el almacenamiento de datos, donde la computadora captura los datos y los almacena. La tercera es una Interfaz Humano-Maquina (HMI), que tiene la función de una unidad de monitoreo y control de todo el sistema, en este caso denominada Interfaz Gráfica de Usuario (GUI).
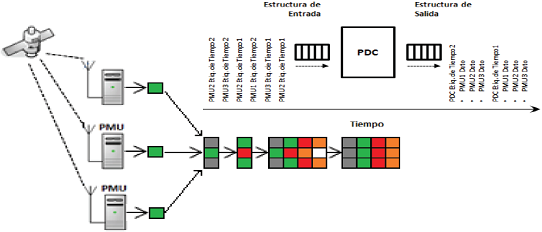
El WAMS virtual termina como una rutina programada en ambiente MATLAB-Simulink®. Esa rutina se codifica para ejecución sobre la plataforma de simulación OPAL-RT®. Se recibe en el subsistema de entradas digitales las muestras de diferentes PMU. El PDC permite manejar una tasa de transmisión configurable y entonces con fines de aumentar la velocidad respecto al SCADA, el diseño de WAMS maneja 20 paquetes de datos por segundo. En la Figura 8, se ejemplifica el proceso de reordenación de paquetes, con transmisiones desde PMU (etiqueta de espacio) y el valor de estos PMU alineado, respecto a una referencia común (etiqueta de tiempo). La aplicación recoge los valores sincronizados como una estructura matricial y el retraso acumulado en el ordenamiento de muestras es mínimo.
En el caso de que la matriz se llene (pase el tiempo correspondiente a las 10 muestras esperadas, 0.5s) y no encuentre todas las mediciones del instante de tiempo indicado, este arroja los datos encontrados sin importar que no estén completos, no realiza ningún proceso para rellenar información faltante, debido a que esta ausencia no modifica el resto de valores encontrados y se declara la ausencia de información de dicho nodo o nodos del sistema.
Interfaz gráfica de usuario
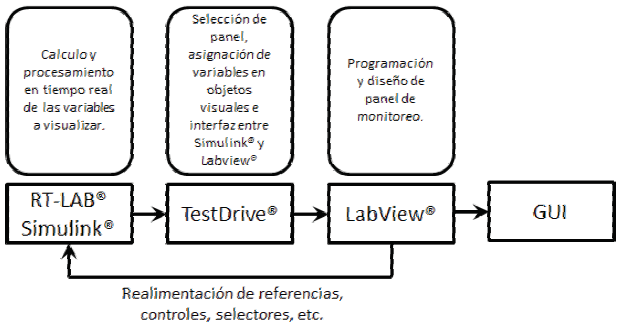
La GUI fue diseñada en LabView®, se creó un sistema de visualización que se enlazó con los datos de salida de la implementación MATLAB-Simulink® de la plataforma OPAL-RT® y su software dedicado RT-LAB® y TestDrive®, esto debido a que la implementación realizada se ejecuta en tiempo real y no es posible que el software que realiza los cálculos (MATLAB-Simulink®) provea directamente de información al software de visualización (LabView®). Este proceso y las actividades de cada etapa se plantean de forma esquemática en la Figura 9.
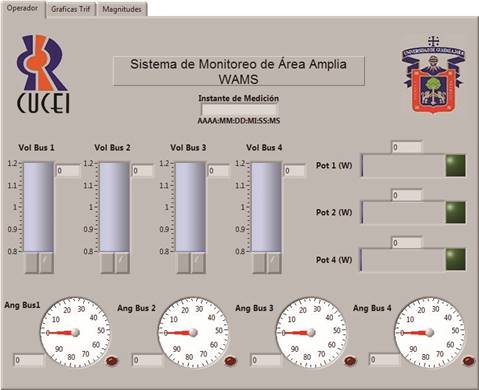
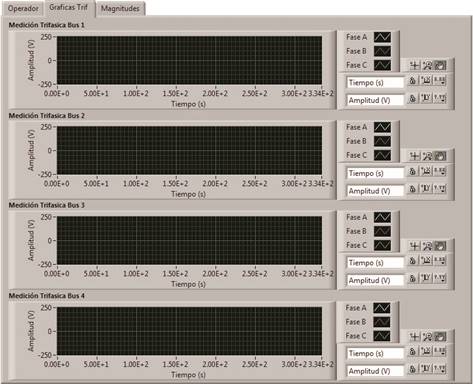
Las variables medidas y propuestas mostradas en la GUI son la magnitud de los voltajes nodales de secuencia positiva en formato pu, ángulos de transferencia de potencia, magnitudes de potencia activa, señales trifásicas de voltaje sin procesar, así como algunas alarmas visuales para señalizar la violación de magnitudes de voltaje o pérdida de información.
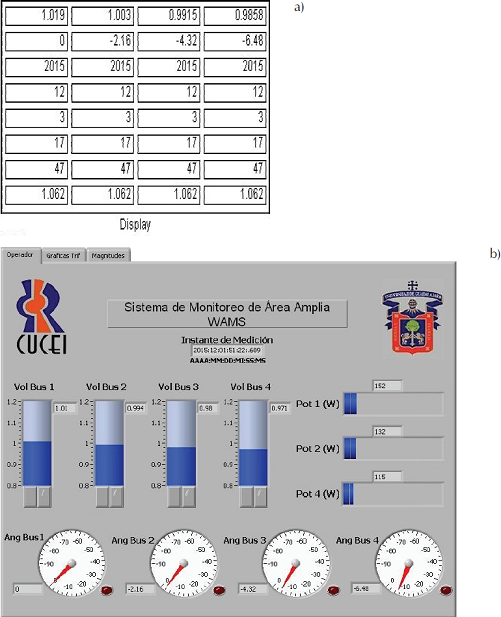
En la Figura 10a se muestra la interfaz programada en este trabajo para usar como visualizador de los datos medidos por las PMU y procesados por el PDC, además se aprovecha la plataforma para enviar los datos crudos, esto es, sin procesamiento para revisar la distorsión que pueden tener las formas de onda ante algunos escenarios operativos, la cual se visualiza en la caratula de la Figura 10b.
Caso de estudio
Para probar el WAMS propuesto se puede utilizar tanto una red de prueba virtual implementada en ambiente Matlab-Simulink® como desde dispositivos físicos, siempre y cuando dichas señales analógicas hayan pasado por un proceso de atenuación para su ingreso a la plataforma de adquisición de señales con que se cuente, en este caso, la del simulador en tiempo real OPAL-RT®:
En este caso para el desarrollo de pruebas se empleó una red física a escala de laboratorio, la cual cuenta con 4 buses: 1 de carga, 1 de generación y 2 de maniobra, como se muestra en la Figura 11. Cabe mencionar que en este caso de estudio se utilizó una red física, sin embargo, el sistema funciona tanto con redes físicas y señales reales como con redes simuladas.
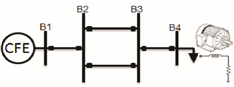
Para obtener la generación se utilizó el suministro de energía eléctrica de CFE, 220V de línea a línea, las líneas de transmisión son un modelo representativo de una línea corta donde solo considera el efecto resistivo y el inductivo propio, la carga es un motor trifásico de 1/4HP. Se monitorean los voltajes de todos los buses, y las corrientes de línea en B1, B2 y B4.
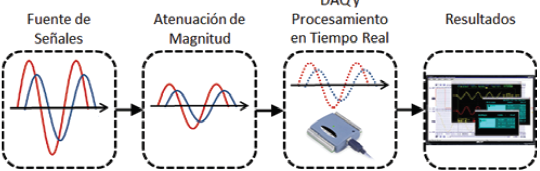
La Figura 12 presenta un esquema de las etapas desarrolladas para probar el WAMS propuesto, el cual consiste en tener el sistema que genera las señales, en este caso la red de prueba mostrada en la Figura 11 y descrita con anterioridad. Como atenuadores se cuenta con TC y TP que reducen las señales a valores de ±20mA y ±10V, los cuales se ingresan por las tarjetas de adquisición de datos (DAQ) para su uso en la plataforma OPAL-RT®, donde se obtendrán señales de forma digital a un tiempo de muestreo de 50 ms, este sistema utiliza el software RT-LAB® para el control de la adquisición de datos y es un enlace para desarrollo en MATLAB-Simulink® donde se implementó el WAMS.
Para validar la implementación realizada de WAMS se utilizará la plataforma de adquisición de datos que acompaña al motor, la cual consiste en TP MI053 de la marca PICO® con una relación de transformación de 100:1, TC TA018 de la misma marca, con una relación de transformación de 100:1 o de 10:1 con selector manual, una DAQ con un tiempo de muestreo máximo de 2.5 µs con 8 canales con su propia interfaz gráfica para visualizar los resultados. La prueba propuesta para validación se basa en el aumento de la carga del motor mediante un acoplamiento con un electrodinamómetro, se van a monitorear los cuatro nodos en el modelo de red a escala de laboratorio (Figura 11), no se consideran cambios topológicos durante la prueba, se va a comparar el registro del nodo B4 (Potencia Activa, Reactiva y Aparente) contra el realizado por la plataforma propia de monitoreo del motor, además de mostrar los datos medidos de voltaje de secuencia positiva y la potencia activa de los cuatro nodos en la carátula de visualización.
Resultados
Al inicio de la prueba el motor se encuentra sin carga, esto es en vacío, con lo cual su potencia activa es baja comparada con la reactiva; se procede a aplicar carga a la flecha del motor por medio del electrodinamómetro, la carga provocó un aumento de la potencia activa y disminución de la reactiva al mejorar el factor de potencia por efecto de carga, al retirarse la carga el motor regresa a su condición de vacío; este comportamiento se puede observar en la Figura 13a y 13b.
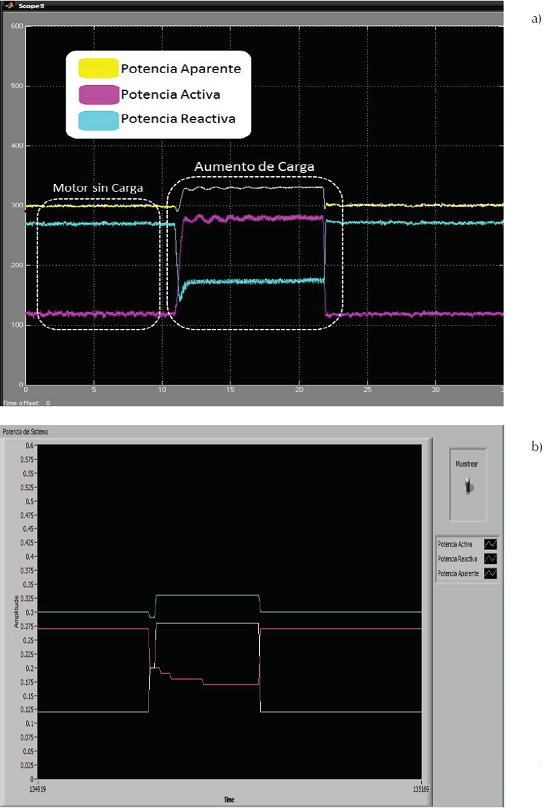
Figura 13 Grafica de potencia medida en el Bus 4 y en el motor, a) Registro del WAMS propuesto y b) Registro del sistema propio del motor
En el primer caso, la Figura 13a presenta el registro con el sistema de monitoreo propuesto en este trabajo, donde para su mejor visualización los valores manejados en pu se les aplica la conversión para regresarlos a valores reales; aunque en el segundo caso el sistema de adquisición de datos y monitoreo propio del motor (Figura 13b), los muestra en pu con una base de 1000 a 1 dado por la relación de sus TP y TC. Al comparar los resultados obtenidos en las Figuras 13a y 13b se puede notar que la propuesta de monitoreo aquí realizada permite registrar cambios de manera más rápida y visualizar estados de transición con mayor detalle a pesar de contar con una DAQ de velocidad menor (50µs contra la de 2.5μs).
Esta prueba permite validar el comportamiento del WAMS propuesto debido a que el registro de potencia calculado con base en las mediciones de voltaje y corriente en los nodos desde la red física a escala de laboratorio y los valores adquiridos de la plataforma de monitoreo del motor que se utiliza como equipo de prueba, aportan el mismo comportamiento y valores numéricos, solo considerando las bases propias de sistema por unidad.
Las mediciones realizadas con el sistema físico pasan un proceso de atenuación de magnitud, posteriormente un procesamiento de señal para calcular el fasor correspondiente, el cual incluye la etiqueta de tiempo en que se tomó la medición, esto con el fin de cumplir los requisitos de un Sincrofasor, además se procede a realizar la colección de datos en un punto concentrador el cual organiza la información con base en la etiqueta de tiempo de los mismos, como se muestra en la Figura 14a, una vez ordenados se desarrollan rutinas como el cálculo de potencia que se empleó en este caso, también es posible alimentar la carátula de visualización para el operador como se muestra en la Figura 14b. Dentro de la misma carátula se incluyeron señales visuales de alarma por violaciones de nivel de voltaje nodal, y es posible incluir un mayor número de alarmas que involucren otros parámetros, la restricción es tener el dato medido o que se pueda calcular directamente usando el valor de voltaje y corriente en su forma fasorial.
Conclusiones
Se desarrolló en plataforma de simulación tiempo real una Unidad de Medición Fasorial (PMU) que cumple con el estándar de IEEE y que puede tener como datos de entrada señales virtuales de simulación o señales analógicas provenientes de un dispositivo físico.
Se realizó la implementación de un Concentrador de Datos Fasoriales (PDC) que procesa la información enviada desde diversas PMU con base en la etiqueta de tiempo de los datos, el envío de los paquetes de datos incluye un retraso lineal en el canal de comunicación, lo que ayuda a probar la confiabilidad del PDC al realizar la búsqueda y acomodo de información.
Se desarrollan rutinas de cálculo de potencia activa, reactiva y aparente con la información disponible en el PDC, además se desarrolla una carátula de visualización para facilitar el proceso de monitoreo.
Se validó la implementación de un Sistema de Monitoreo de Área Amplia (WAMS) a escala de laboratorio usando mediciones reales y comparando contra un sistema de adquisición de señales propio del dispositivo probado. Aunque se empleó un sistema de cuatro nodos, es posible realizar este procedimiento incluyendo un mayor número de nodos y no restringiéndose a que sean solo señales virtuales o reales.

