











 nova página do texto(beta)
nova página do texto(beta) Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1 Introduction
Optimization minimizes or maximizes a function by randomly choosing the values of the variables within an admissible range [94, 96]. Research continues to develop algorithms that achieve the above purpose. The development of algorithms for real problems is of interest to many research studies. In the beginning optimization techniques used gradient based algorithms, where the main idea was to find a range of solutions near the origin [2, 55], these methods provide accurate solutions and fast convergence, better than stochastic approaches. The problem is that this type of algorithms will only tend to local minima and not to the global minimum.
The resource constraint is faced in daily competition to all types of systems, in this struggle different strategies have been employed to change the established order. Optimization is used to handle the problem of limited resources (producing more with less). In the search for optimization, goals must be achieved with few resources [3, 4]. The objective function is the set goal that varies depending on the problem [5, 6]. The goal of optimization is to find the parameter values that minimize or maximize a specific objective, for example, in an engineering design is to find the parameter values that satisfy the needs of the design with minimum cost, optimization solves this type of requirement.
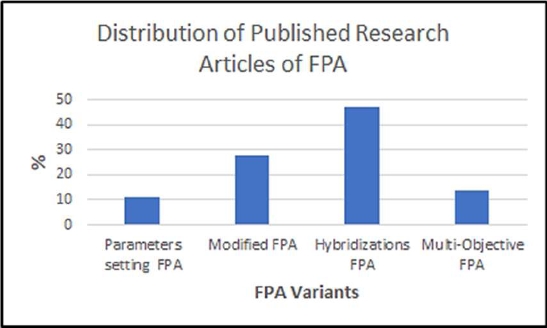
FPA is a very popular optimization method among researchers because of its characteristics as it has few parameters and has demonstrated a robust performance when applied to various optimization problems, that is why we decided to use this metaheuristic inspired by nature, besides that we have worked previously with this algorithm [7] and has proven to be very good and we can see it in the work done by [8, 17, 36, 37, 41, 42, 50, 51, 52, 64, 87, 88, 89, 90], there are variants of FPA developed by [59, 60, 61, 62, 63], in Figure 1 we can see a graphical summary of the variants [86], also hybrid algorithms have been developed with the FPA as [64, 65, 66, 67, 68], the applications of the FPA in the areas Chemical Engineering, for thermodynamic systems [69], in petroleum industry [70] where FPA is one of the effective algorithms in this area, in the preparation of triaxial porcelain from Palm Oil Fuel Ash (POFA) [71] and POFA was used as the cement filler for enhancing the EMI absorption of cement-based composites [72].
In civil engineering it is one of the most important areas of applied optimization, because nonlinear design problems with complex constraints, costs, architectural design constraints, physical requirements often generate a complex engineering problem [73, 74, 75]. In mechanical engineering FPA has contributed in solving speed reducer, gear train, tension-compression spring design problems using hybrid algorithms with FPA with local search [66, 74, 76, 77, 78].
In Electronical and Communication Engineering, metaheuristic methods have also been employed in wireless communication systems such as [79, 80], using global pollination, enhanced local pollination and dynamic shift probability FPA was improved by [81], also FPA was used to solve radio spectrum optimization problems. In Energy and Power Systems, Dubey et al [59] modified FPA to solve practical power system test cases, Prathiba et al [82] employed FPA to minimize fuel cost in a bus system.
Lenin et al [67] hybridized FPA with harmony search algorithm to optimize reactive power dispatch. In Computer Science, FPA was employed in image compression Kaur et al [83], for multilevel image FPA was used for Ouadfel and Taleb-Ahmed [84].
A binary FPA was employed for Rodrigues et al [85] for solutions across the corner in electro encephalogram, Jensi and Jiji [68] proposed a hybrid approach combining K-Means algorithm and FPA that finds the center of the optimal cluster.
The main contribution of this work is to use the metaheuristic Flower Pollination Algorithm (FPA) and the Type 2 Fuzzy Logic System (IT2FLS) to dynamically adjust the parameters of the FPA in order to obtain better results than in the previous work [6], where experiments with FPA and Fuzzy Logic were performed.
In other published works [30, 31, 32, 33, 34] and in the most recent ones [35, 36] it has been shown that the use of Fuzzy Logic can be better because good results are obtained than not using it but using (IT2FLS) in the dynamic adaptation of the parameters in the FPA metaheuristic is much better by the results obtained in this research.
The remainder of this article is organized as follows. Section 2 describes works that other authors have done on the FPA algorithm and the IT2FLS method, Section 3 gives a very general review of the bio-inspired algorithms, Section 4 is basic information on the FPA algorithm, Section 5 describes the origin and development of the type-1 and interval type-2 fuzzy systems, Sections 6 and 7 present the model and the proposed parameters, in Section 8 we show the results of this research and finally in Section 9 we present the conclusions of this paper.
2 Related Works
Several researches on the Flower Pollination Algorithm (FPA) and a Fuzzy System (FS) have been developed in the 8 years, one of them is where the optimization of the parameters of the membership functions is performed using the FPA algorithm to simulate the motion of a robot [8], according to [7] in the simulation the FPA algorithm calls the model and, in the process, updates the variables. In another paper [9] where a hybrid approach for fire outbreak detection based on FPA algorithm and IT2FLS using meteorological parameters is proposed.
According to fire information, numerous grammatical uncertainties can be assumed in type-2 membership functions, so that the accuracy of fuzzy systems can be increased [50]. In a work we conducted in 2020 [6] where we used the FPA Algorithm and a FS to solve a water tank control problem, by means of the FPA algorithm, the parameters of the membership functions of the fuzzy system simulating the water tank were optimized.
3 Bioinspired Optimizations
Bio-inspired optimization is based on biological systems, which have been the inspiration for solving optimization problems. The subsets of natural computation according to [10, 53] are biological computation and optimization. Metaheuristic optimization simulates the biological behaviors of animals or plants and has been used to find the optimal solution to a problem. A metaheuristic is a heuristic strategy to solve complex optimization problems.
Optimization methods according to Fevrier Valdez, et al. 2020 [11, 58] in 1960 Holland at the University of Michigan started working with Genetic Algorithms (GAs) [12, 93, 95], in 1995 Eberhart and Kennedy, inspired by the social behavior of bird flocking or fish schooling, developed Particle Swarm Optimization (PSO) [13], in 1983 Kirkpatrick et al. And in 1985 Cerny proposed the simulated annealed probabilistic (SA) method [14] and the Pattern Search developed by Robert Hooke and T. A. Jeeves [15] is a family of numerical optimization methods that does not require the gradient of the problem to be optimized, so it can be used on functions that are not continuous or differentiable.
4 Flower Pollination Algorithm (FPA)
FPA was developed by Xin-She Yang in 2012, inspired by the pollination process of flowering plants [16, 17, 36, 37], let us analyze the general pollination behavior of plants, there are two forms of pollination: biotic and abiotic.
Biotic pollination: pollen is transported to the stigma by insects and animals. Abiotic pollination: wind and water are the means of pollination. Research says that 10% of pollination has an abiotic pollination process and, therefore, does not require any pollinator.
There are two ways of pollination: self-pollination and cross-pollination. Self-pollination occurs from the pollen of the same flower or from different flowers of the same plant, in this process local pollination occurs and cross-pollination occurs through a flower of a different plant and can occur over long distances by means of bees, bats, birds, flies, etc., which fly long distances, these pollinators make global pollination possible [17, 38, 39, 40]. The author of the algorithm describes the flower constancy and the behavior of pollinators in the pollination process with the following four rules [17, 41, 42, 43, 44, 45]:
Global pollination process takes place by biotic and cross-pollination and pollinators perform Lévy flights [17, 46, 47].
Local pollination process is considered abiotic and self-pollinating.
Flower constancy, pollinators visit plants with specific flowers to increase reproductive success.
A probability of change p ∈ [0, 1] that controls global and local pollination.
The basic idea is the fact that each plant has a flower and each flower originates a gamete, so it is established is that it is not necessary to distinguish between a plant, a flower or a gamete [51]. Birds, insects, etc. (pollinators) can fly enormous distances for biotic and cross-pollination to occur. Lévy's flight perfectly describes the flight of pollinators, rules 1 and 3 using Levy's distribution [52] describe global pollination to plot random step sizes (L) as Eq. (1).
The mathematical modeling of the 4 rules is as follows; the processes of global pollination (Rule 1) and flower constancy (Rule 3) are represented by the following equation:
where:
where:
Local pollination (Rule 2), and flower constancy (Rule 3) can be represented as follows:
where:
Fourth rule, flower pollination processes can occur randomly at all scales, both in the local and global case. Therefore, to emulate this biorientation, a switching parameter
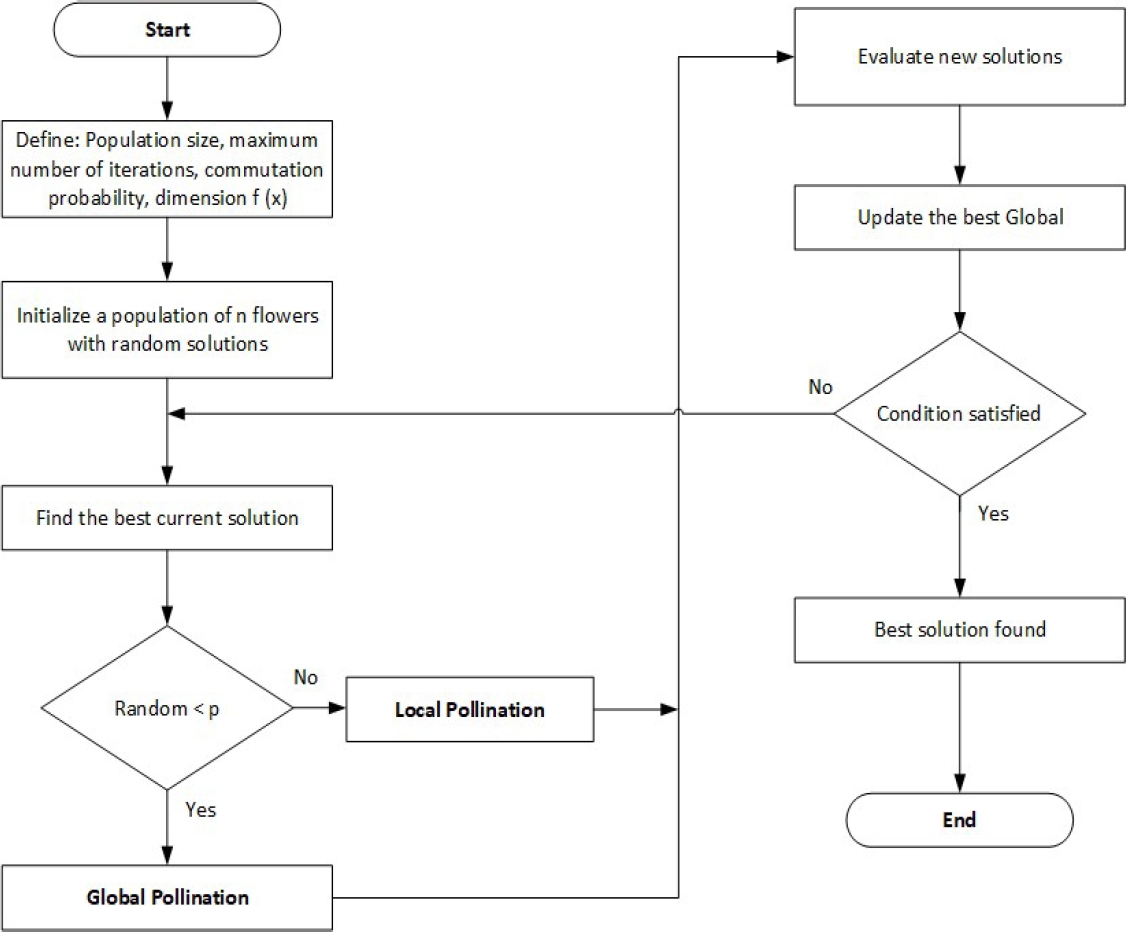
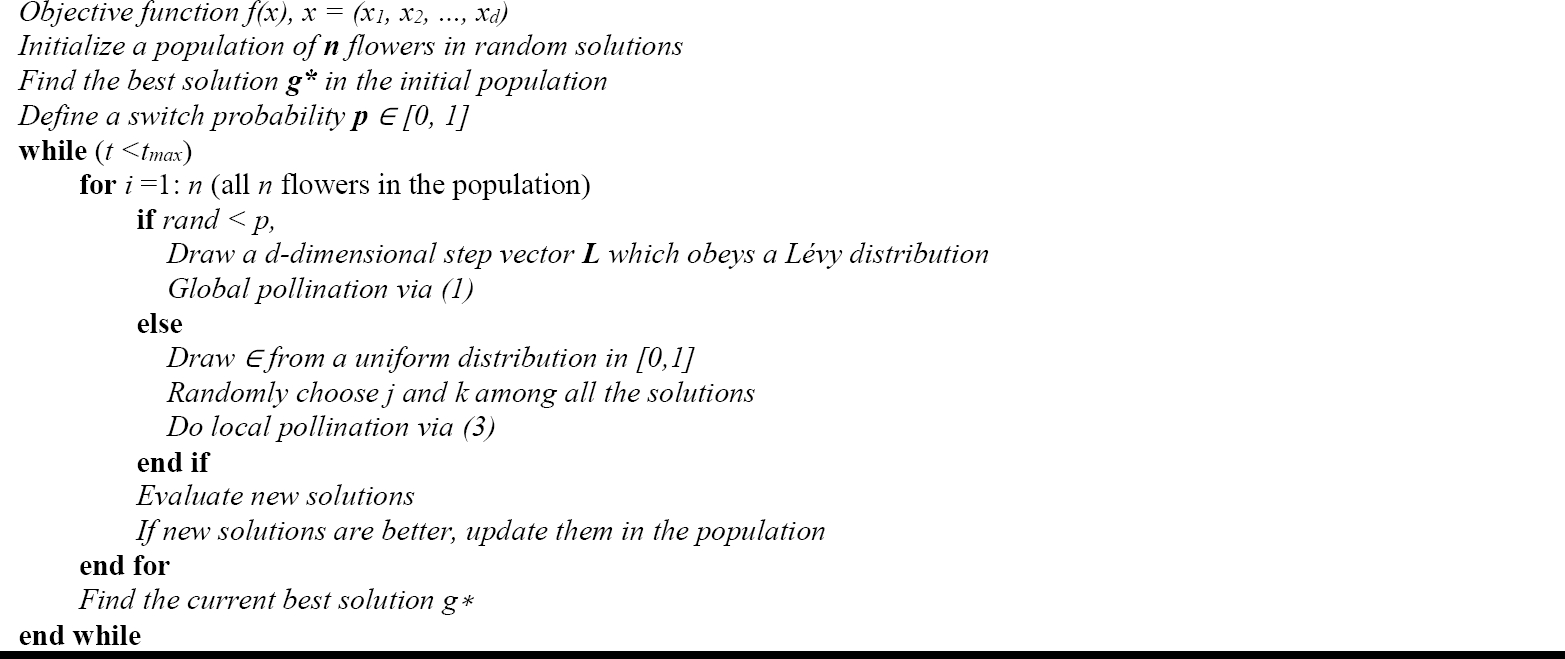
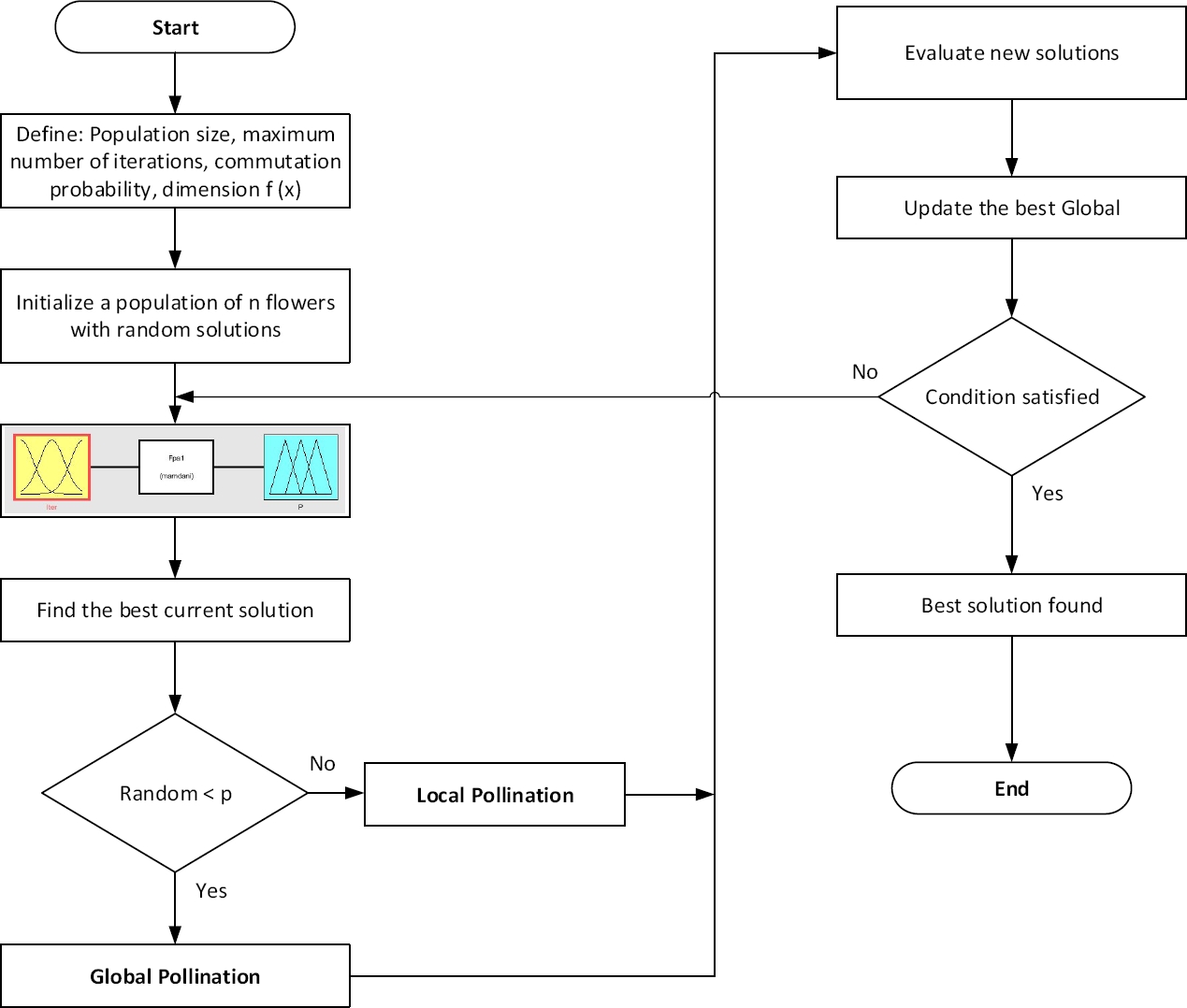
In the following, the flowchart and pseudocode of the flower pollination algorithm are shown in Figures 2 and 3.
5 Fuzzy Logic
Uncertainty, doubt, skepticism, suspicion, imprecision, approximation and distrust mean lack of certainty about someone or something. Uncertainty can range from lack of certainty to almost total lack of conviction or knowledge, especially about an outcome. Uncertainty has always been present in human life, one of the main advances on uncertainty in recent years is the introduction of fuzzy logic, which means a deep understanding of approximate reasoning [18], the origin of fuzzy logic comes from fuzzy set theory, its principles come from two sources of the last century [19]:
– First: Charles S. Peirce, who applied the term "Logic of vagueness" and was unable to develop and complete his theory before his death [19]. The mathematician and philosopher Max Black (1937) took up the concept of "Logic of vagueness" [20]. In 1923, the philosopher Bertrand Russell proposed that "vagueness" is a matter of value [21]. Therefore, the "Logic of vagueness" turned out to be the subject of interest of other researchers such as Brock [22], Nadin [23, 24], Engel-Tiercelin [25] and Merrell [26, 27] [19]
– Second source: the mathematician Lofti A. Zadeh used in 1960 for the first time the term "Fuzzy Sets" and continued to develop this idea for the next 40 years, in his first paper published in 1965 on Fuzzy Sets [28], it was the beginning of a new stage of his scientific career, in the publication of this first article, the answer generated in the scientific community a lot of controversy.
From 1965 onwards, all published articles focused on the process and use of the fuzzy set thesis [19]. Professor Richard Bellman, renowned mathematician, was its main advocate and one of its most important contributors to the analysis and control of systems, in general this theory "Fuzzy Sets" was received with hostility and skepticism.
5.1 Basic Theory
The idea of Fuzzy Logic is not to determine whether the variable X is true or false, but to determine to what degree ∈ [0,1] it is true. We call this degree of certainty the degree of membership, although in some texts it is called possibility and, in this case, special emphasis is usually made on the difference between probability (empirical measure of the frequency with which an observation is repeated in a set of measurements) and possibility (degree of membership of an observation to a fuzzy set), we also speak of confidence level since it is the degree to which we are sure that the observation belongs to the defined set. The degree of membership is assigned by the membership function (f: X → R).
Fuzzy set theory allows us to gradually evaluate the membership of elements relative to a set. The fuzzy set 'A' in a nonempty space X(A⊆X) can be defined as [19]:
where
Figure 4 shows us the basic structure of a fuzzy control system [96, 97, 98], which are detailed below:
– Fuzzification: Fuzzifies the system inputs.
– Rule base: Contains the selection of fuzzy rules.
– Mechanism of inference (Rule Inference Module): It contains a database that defines the membership functions used in the rules and a reasoning mechanism that performs the inference procedure (fuzzy reasoning).
– Defuzzification: Converts the (fuzzy) result of the inference process to a real value (crisp) within the domain of the output variable [31].

5.2 Interval Type-2 Fuzzy Logic System
It is known that Type-2 fuzzy systems (T2FLS) allow us to model and minimize the effects of uncertainty in Type-1 Fuzzy Systems (T1FLS) [32, 49]. We also understand that Type-2 fuzzy systems are more difficult to use and understand, so their use is still not very common [48, 54, 56, 98].
Figure 6 shows structure of Type-2 Fuzzy Control System T2FLS [1, 33, 34, 35, 57, 92]:
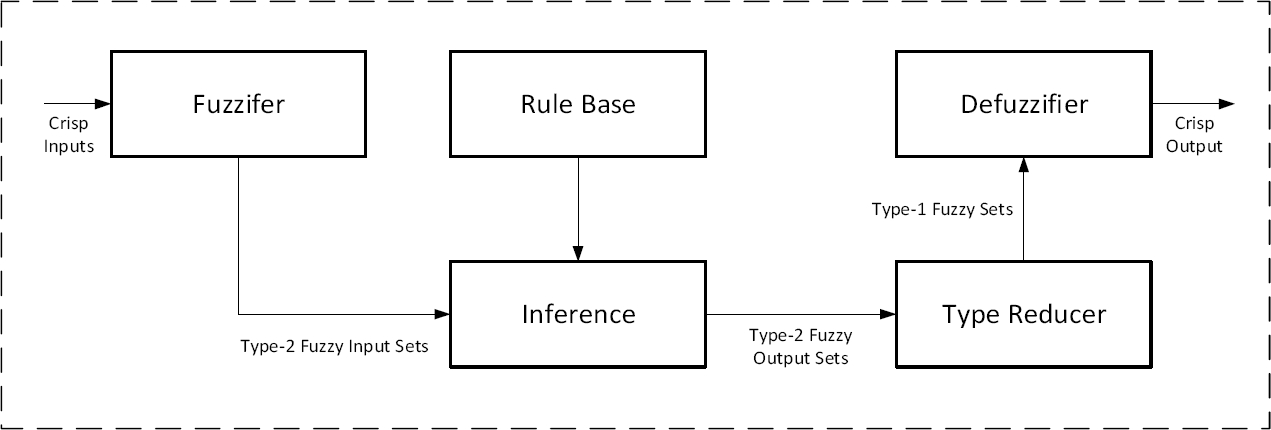
The interval type 2 fuzzy sets proposed by Zadeh [91] and continued by Liang and Mendel [35], provide the mathematical approach to handle uncertainty by means of a secondary domain describing the uncertainty of the data. Mathematical equation of IT2FLS (6):
6 Mathematical Modeling of Fuzzy Flower Pollination Algorithm (FFPA)
Figure 7 shows the FPA flow diagram where the type-2 fuzzy system is included in the algorithm process by intervals.
7 Parameter Adaptation
This research uses the optimization algorithm inspired by the nature FPA, the method to optimize the parameters applies small adjustments in the optimization process, for the adjustment of the parameters, it uses Interval Type-2 Fuzzy Logic System (IT2FLS) to verify the value of one or more parameters in each iteration of the algorithm.
The fuzzy system uses as input the percentage of iterations in which p is evaluated, to know the new values of the parameters and thus to know if it is a global or local pollination.
To evaluate the error of these metrics, the parameter E (epsilon) is used, which represents the flower constancy, all these parameters are used as input for the fuzzy system defined by equations (7) and (8):
Mean Square Error (MSE):
where:
8 Simulation Results
All the experiments carried out in this investigation were done with 8 mathematical functions, Figure 8, shows the 8 Benchmark functions: Sphere, Ackley, Rastrigin, Zakharov, Griewank, Sum of Different Powers, Michalewickz and Rosenbrock, FPA-T1FLS and FPA-IT2FLS as indicated in the table.

Tables 1 and 2 show the results: Best, Worse, Mean, and Standard Deviation for 30 and 100 dimensions of the FPA-T1FLS.
Table 1 Experiments with FPA and T1FLS
| 30 – Dimensions – FPA-T1FLS | ||||
| Function | Best | Worse | Mean | Std |
| 1-Sphere | 1.650E-04 | 2.080E-02 | 4.350E-03 | 5.000E-03 |
| 2-Ackley | 1.690E-02 | 2.210E+00 | 7.620E-01 | 9.830E-01 |
| 3-Rastrigin | 2.630E-02 | 1.070E+02 | 9.800E+00 | 2.530E+01 |
| 4-Zakharov | 2.790E-03 | 1.380E-01 | 3.890E-02 | 3.670E-02 |
| 5-Griewank | 2.530E-06 | 6.310E-04 | 1.410E-04 | 1.320E-04 |
| 6-Sum of Dif Powers | 5.010E-17 | 2.510E-11 | 1.120E-12 | 4.550E-12 |
| 7-Michalewicz | -9.520E+00 | -1.310E+01 | -1.180E+01 | 8.360E-01 |
| 8-Rosenbrock | 2.370E+01 | 4.690E+01 | 3.230E+01 | 4.370E+00 |
Table 2 Experiments with FPA and T1FLS
| 100 – Dimensions – FPA-T1FLS | ||||
| Function | Best | Worse | Mean | Std |
| 1 Sphere | 3.570E-01 | 1.490E+00 | 7.520E-01 | 2.830E-01 |
| 2 Ackley | 3.960E-01 | 7.430E-01 | 5.890E-01 | 7.740E-02 |
| 3 Rastrigin | 5.890E-01 | 1.030E+00 | 7.910E-01 | 1.060E-01 |
| 4 Zakharov | 1.110E+00 | 4.100E+00 | 2.080E+00 | 6.090E-01 |
| 5 Griewank | 2.660E-03 | 6.530E-03 | 4.020E-03 | 8.870E-04 |
| 6 Sum of Dif Powers | 6.630E-14 | 1.090E-08 | 7.840E-10 | 2.170E-09 |
| 7 Michalewicz | -1.400E+01 | -2.350E+01 | -1.910E+01 | 2.050E+00 |
| 8 Rosenbrock | 1.270E+02 | 2.170E+02 | 1.680E+02 | 2.090E+01 |
Tables 3 and 4 show the results: Best, Worse, Mean, and Standard Deviation for 30 and 100 dimensions of the non-optimized FPA-IT2FLS.
Table 3 Experiments with FPA and non-optimized IT2FLS
| 30 – Dimensions – FPA-IT2FLS | ||||
| Function | Best | Worse | Mean | Std |
| 1-Sphere | 3.910E-04 | 2.150E-02 | 5.100E-03 | 5.150E-03 |
| 2-Ackley | 9.390E-02 | 1.220E-01 | 7.270E-02 | 3.390E-02 |
| 3-Rastrigin | 3.170E+01 | 3.840E+01 | 3.500E+01 | 1.880E+00 |
| 4-Zakharov | 1.010E-02 | 1.240E-01 | 5.230E-02 | 3.010E-02 |
| 5-Griewank | 2.880E-05 | 6.800E-04 | 1.820E-04 | 1.520E-04 |
| 6-Sum of Dif Powers | 1.210E-17 | 3.570E-11 | 1.650E-12 | 6.450E-12 |
| 7-Michalewicz | -8.510E+00 | -1.170E+01 | -9.760E+00 | 7.620E-01 |
| 8-Rosenbrock | 7.470E+01 | 1.110E+02 | 8.920E+01 | 9.260E+00 |
Table 4 Experiments with FPA and non-optimized IT2FLS
| 100 – Dimensions – FPA-IT2FLS | ||||
| Function | Best | Worse | Mean | Std |
| 1-Sphere | 5.710E-01 | 1.640E+00 | 1.010E+00 | 2.900E-01 |
| 2-Ackley | 5.950E-01 | 4.950E-01 | 5.700E-01 | 1.090E-01 |
| 3-Rastrigin | 2.260E+02 | 2.540E+02 | 2.360E+02 | 6.470E+00 |
| 4-Zakharov | 1.300E+00 | 3.450E+00 | 2.190E+00 | 4.740E-01 |
| 5-Griewank | 5.760E-03 | 1.440E-02 | 9.690E-03 | 2.270E-03 |
| 6-Sum of Dif Powers | 6.690E-15 | 4.510E-08 | 3.010E-09 | 8.940E-09 |
| 7-Michalewicz | -1.260E+01 | -1.640E+01 | -1.460E+01 | 9.380E-01 |
| 8-Rosenbrock | 1.080E+03 | 1.320E+03 | 1.210E+03 | 5.390E+01 |
Tables 5 and 6 show the results: Best, Worse, Mean, and Standard Deviation for 30 and 100 dimensions of the FPA-IT2FLS optimized for the FPA13T2330 architecture.
Table 5 Experiments with FPA and optimized IT2FLS
| 30 – Dimensions – FPA-IT2FLS – FPA13T2330 | ||||
| Function | Best | Worse | Mean | Std |
| 1.Sphere | 1.410E-03 | 5.229E-02 | 7.968E-03 | 9.250E-03 |
| 2.Ackley | 4.223E-02 | 1.671E-01 | 8.219E-02 | 3.312E-02 |
| 3.Rastrigin | 2.900E+01 | 3.840E+01 | 3.434E+01 | 2.194E+00 |
| 4.Zakharov | 6.703E-03 | 1.502E-01 | 5.799E-02 | 3.535E-02 |
| 5.Griewank | 4.354E-05 | 1.100E-03 | 3.038E-04 | 2.270E-04 |
| 6.Sum of Dif Powers | 2.488E-19 | 8.314E-09 | 3.116E-10 | 1.491E-09 |
| 7.Michalewicz | -1.129E+01 | -8.452E+00 | -9.932E+00 | 7.098E-01 |
| 8.Rosenbrock | 9.051E+01 | 1.379E+02 | 1.077E+02 | 1.099E+01 |
Table 6 Experiments with FPA and optimized IT2FLS
| 100 – Dimensions – FPA-IT2FLS – FPA13T2330 | ||||
| Function | Best | Worse | Mean | Std |
| 1 Sphere | 4.395E-01 | 1.486E+00 | 9.833E-01 | 2.426E-01 |
| 2 Ackley | 4.748E-01 | 1.030E+00 | 7.034E-01 | 1.275E-01 |
| 3 Rastrigin | 2.273E+02 | 2.624E+02 | 2.476E+02 | 8.315E+00 |
| 4 Zakharov | 1.210E+00 | 3.469E+00 | 2.106E+00 | 5.325E-01 |
| 5 Griewank | 6.794E-03 | 2.323E-02 | 1.362E-02 | 3.384E-03 |
| 6 Sum of Dif Powers | 3.800E-14 | 3.892E-07 | 2.653E-08 | 8.098E-08 |
| 7 Michalewicz | -1.686E+01 | -1.313E+01 | -1.474E+01 | 1.008E+00 |
| 8 Rosenbrock | 1.412E+03 | 1.714E+03 | 1.549E+03 | 6.847E+01 |
Tables 7 and 8 show the results: Best, Worse, Mean, and Standard Deviation for 30 and 100 dimensions of the FPA-IT2FLS optimized for the FPA13T2B130 architecture.
Table 7 Experiments with FPA and optimized IT2FLS
| 30 – Dimensions – FPA-IT2FLS – FPA13T2B130 | ||||
| Function | Best | Worse | Mean | Std |
| 1.Sphere | 5.676E-04 | 2.330E-02 | 6.731E-03 | 5.871E-03 |
| 2.Ackley | 2.583E-02 | 1.895E-01 | 8.226E-02 | 3.306E-02 |
| 3.Rastrigin | 2.839E+01 | 3.940E+01 | 3.478E+01 | 2.408E+00 |
| 4.Zakharov | 1.476E-02 | 1.722E-01 | 5.126E-02 | 3.528E-02 |
| 5.Griewank | 2.525E-05 | 9.736E-04 | 2.843E-04 | 2.096E-04 |
| 6.Sum of Dif Powers | 1.491E-17 | 4.638E-10 | 1.915E-11 | 8.446E-11 |
| 7.Michalewicz | -1.075E+01 | -8.854E+00 | -9.916E+00 | 4.734E-01 |
| 8.Rosenbrock | 9.574E+01 | 1.376E+02 | 1.132E+02 | 1.028E+01 |
Table 8 Experiments with FPA and optimized IT2FLS
| 100 – Dimensions – FPA-IT2FLS – (FPA13T2B130) | ||||
| Function | Best | Worse | Mean | Std |
| 1-Sphere | 5.798E-01 | 1.327E+01 | 9.797E+00 | 4.478E+00 |
| 2-Ackley | 4.947E-01 | 8.192E-01 | 6.573E-01 | 9.349E-02 |
| 3-Rastrigin | 2.315E+02 | 2.643E+02 | 2.521E+02 | 7.748E+00 |
| 4-Zakharov | 8.883E+01 | 1.077E+02 | 9.939E+01 | 4.088E+00 |
| 5-Griewank | 7.521E-03 | 2.346E-02 | 1.283E-02 | 3.657E-03 |
| 6-Sum of Dif Powers | 5.444E-15 | 3.533E-08 | 1.470E-09 | 6.361E-09 |
| 7-Michalewicz | -1.828E+01 | -1.275E+01 | -1.489E+01 | 1.142E+00 |
| 8-Rosenbrock | 1.474E+03 | 1.802E+03 | 1.638E+03 | 8.748E+01 |
Table 9 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 30 dimensions, hypothesis tests were performed with non-optimized FPA-T1FLS and FPA-IT2FLS, it can be observed that only in 4 mathematical functions there were significant evidence that FPA-IT2FLS is better than FPA-T1FLS.
Table 9 Comparison FPA-T1FLS with non-optimized FPA-IT2FLS
| COMPARATIVE 30 Dim | FPA-T1FLS | FPA-IT2FLS | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1.Sphere | 4.350E-03 | 5.000E-03 | 5.100E-03 | 5.150E-03 | N |
| 2.Ackley | 7.620E-01 | 9.830E-01 | 7.270E-02 | 3.390E-02 | Y |
| 3.Rastrigin | 9.800E+00 | 2.530E+01 | 3.500E+01 | 1.880E+00 | Y |
| 4.Zakharov | 3.890E-02 | 3.670E-02 | 5.230E-02 | 3.010E-02 | N |
| 5.Griewank | 1.410E-04 | 1.320E-04 | 1.820E-04 | 1.520E-04 | N |
| 6.Sum of Dif Powers | 1.120E-12 | 4.550E-12 | 1.650E-12 | 6.450E-12 | N |
| 7.Michalewicz | -1.180E+01 | 8.360E-01 | -9.760E+00 | 7.620E-01 | Y |
| 8.Rosenbrock | 3.230E+01 | 4.370E+00 | 8.920E+01 | 9.260E+00 | Y |
Table 10 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 100 dimensions, hypothesis tests were performed with non-optimized FPA-T1FLS and FPA-IT2FLS, it can be observed that only in 5 mathematical functions there were significant evidence that FPA-IT2FLS is better than FPA-T1FLS.
Table 10 Comparison FPA-T1FLS with non-optimized FPA-IT2FLS
| COMPARATIVE 100 Dim | FPA-T1FLS | FPA-IT2FLS | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1 Sphere | 7.520E-01 | 2.830E-01 | 1.010E+00 | 2.900E-01 | Y |
| 2 Ackley | 5.890E-01 | 7.740E-02 | 5.700E-01 | 1.090E-01 | N |
| 3 Rastrigin | 7.910E-01 | 1.060E-01 | 2.360E+02 | 6.470E+00 | Y |
| 4 Zakharov | 2.080E+00 | 6.090E-01 | 2.190E+00 | 4.740E-01 | N |
| 5 Griewank | 4.020E-03 | 8.870E-04 | 9.690E-03 | 2.270E-03 | Y |
| 6 Sum of Dif Powers | 7.840E-10 | 2.170E-09 | 3.010E-09 | 8.940E-09 | N |
| 7 Michalewicz | -1.910E+01 | 2.050E+00 | -1.460E+01 | 9.380E-01 | Y |
| 8 Rosenbrock | 1.680E+02 | 2.090E+01 | 1.210E+03 | 5.390E+01 | Y |
Table 11 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 30 dimensions, hypothesis tests were performed with FPA-T1FLS and optimized FPA-IT2FLS (FPA13T2330), it can be observed the following.
Table 11 Comparison FPA-T1FLS with optimized FPA-IT2FLS
| COMPARATIVE 30 Dim | FPA-T1FLS | FPA-IT2330 | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1 Sphere | 4.350E-03 | 5.000E-03 | 7.968E-03 | 9.250E-03 | Y |
| 2 Ackley | 7.620E-01 | 9.830E-01 | 8.219E-02 | 3.312E-02 | Y |
| 3 Rastrigin | 9.800E+00 | 2.530E+01 | 3.434E+01 | 2.194E+00 | Y |
| 4 Zakharov | 3.890E-02 | 3.670E-02 | 5.799E-02 | 3.535E-02 | Y |
| 5 Griewank | 1.410E-04 | 1.320E-04 | 3.038E-04 | 2.270E-04 | Y |
| 6 Sum of Dif Powers | 1.120E-12 | 4.550E-12 | 3.116E-10 | 1.491E-09 | N |
| 7 Michalewicz | -1.180E+01 | 8.360E-01 | -9.932E+00 | 7.098E-01 | Y |
| 8 Rosenbrock | 3.230E+01 | 4.370E+00 | 1.077E+02 | 1.099E+01 | Y |
Only in 7 mathematic functions there was significant evidence that the FPA-IT2FLS (FPA13T2330) is better than the FPA-T1FLS. Table 12 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 100 dimensions, hypothesis tests were performed with FPA-T1FLS and optimized FPA-IT2FLS (FPA-IT2330), it can be observed that only in For 7 mathematical functions, there was significant evidence that the FPA-IT2FLS (FPA-IT2330) is better than the FPA-T1FLS.
Table 12 Comparison FPA-T1FLS with optimized FPA-IT2FLS
| COMPARATIVE 100 Dim | FPA-T1FLS | FPA-IT2330 | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1.Sphere | 7.520E-01 | 2.830E-01 | 9.833E-01 | 2.426E-01 | Y |
| 2.Ackley | 5.890E-01 | 7.740E-02 | 7.034E-01 | 1.275E-01 | Y |
| 3.Rastrigin | 7.910E-01 | 1.060E-01 | 2.476E+02 | 8.315E+00 | Y |
| 4.Zakharov | 2.080E+00 | 6.090E-01 | 2.106E+00 | 5.325E-01 | N |
| 5.Griewank | 4.020E-03 | 8.870E-04 | 1.362E-02 | 3.384E-03 | Y |
| 6.Sum of Dif Powers | 7.840E-10 | 2.170E-09 | 2.653E-08 | 8.098E-08 | Y |
| 7.Michalewicz | -1.910E+01 | 2.050E+00 | -1.474E+01 | 1.008E+00 | Y |
| 8.Rosenbrock | 1.680E+02 | 2.090E+01 | 1.549E+03 | 6.847E+01 | Y |
Table 13 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 30 dimensions, hypothesis tests were performed with FPA-T1FLS and optimized FPA-IT2FLS (FPA-IT2B130), it can be observed that only in For 6 math functions, there was significant evidence that the FPA-IT2FLS (FPA-IT2B130) is better than the FPA-T1FLS. Table 14 shows the results: Best, Worse, Mean, Standard Deviation and Z-Test, for 100 dimensions, hypothesis tests were performed with FPA-T1FLS and optimized FPA-IT2FLS (FPA-IT2B130), it can be observed that only in 7 mathematical functions there was significant evidence that the FPA-IT2FLS (FPA-IT2B130) is better than the FPA-T1FLS.
Table 13 Comparison FPA-T1FLS with optimized FPA-IT2FLS
| COMPARATIVE 30 Dim | FPA-T1FLS | FPA-IT2B130 | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1 Sphere | 4.350E-03 | 5.000E-03 | 6.731E-03 | 5.871E-03 | Y |
| 2 Ackley | 7.620E-01 | 9.830E-01 | 8.226E-02 | 3.306E-02 | Y |
| 3 Rastrigin | 9.800E+00 | 2.530E+01 | 3.478E+01 | 2.408E+00 | Y |
| 4 Zakharov | 3.890E-02 | 3.670E-02 | 5.126E-02 | 3.528E-02 | N |
| 5 Griewank | 1.410E-04 | 1.320E-04 | 2.843E-04 | 2.096E-04 | Y |
| 6 Sum of Dif Powers | 1.120E-12 | 4.550E-12 | 1.915E-11 | 8.446E-11 | N |
| 7 Michalewicz | -1.180E+01 | 8.360E-01 | -9.916E+00 | 4.734E-01 | Y |
| 8 Rosenbrock | 3.230E+01 | 4.370E+00 | 1.132E+02 | 1.028E+01 | Y |
Table 14 Comparison FPA-T1FLS with optimized FPA-IT2FLS
| COMPARATIVE 100 Dim | FPA-T1FLS | FPA-IT2B130 | Z-Test | ||
| Function | Mean | Std | Mean | Std | |
| 1.Sphere | 7.520E-01 | 2.830E-01 | 9.797E+00 | 4.478E+00 | Y |
| 2.Ackley | 5.890E-01 | 7.740E-02 | 6.573E-01 | 9.349E-02 | Y |
| 3.Rastrigin | 7.910E-01 | 1.060E-01 | 2.521E+02 | 7.748E+00 | Y |
| 4.Zakharov | 2.080E+00 | 6.090E-01 | 9.939E+01 | 4.088E+00 | Y |
| 5.Griewank | 4.020E-03 | 8.870E-04 | 1.283E-02 | 3.657E-03 | Y |
| 6.Sum of Dif Powers | 7.840E-10 | 2.170E-09 | 1.470E-09 | 6.361E-09 | N |
| 7.Michalewicz | -1.910E+01 | 2.050E+00 | -1.489E+01 | 1.142E+00 | Y |
| 8.Rosenbrock | 1.680E+02 | 2.090E+01 | 1.638E+03 | 8.748E+01 | Y |
9 Conclusions and Further Research
We have seen in other research that when we use a Type-1 Fuzzy Logic System (T1FLS) in parameter optimization of a bio-inspired algorithm, good results are obtained, but when we use a Type-2 Fuzzy Logic System (T2FLS) for parameter optimization, better results are obtained.
In this research, we used the bio-inspired algorithm FPA and an Interval Type-2 Fuzzy Logic System (IT2FLS). The experiments were performed with 8 benchmark functions: Sphere, Ackley, Rastrigin, Zakharov, Griewank, Sum of different powers, Michalewicz and Rosenbrock for 30 and 100 dimensions.
Once the hypothesis tests are done, we can observe that the methods that use interval type-2 fuzzy systems are better than type-1 fuzzy systems and even better results are obtained when interval type-2 fuzzy systems are optimized, in this research the FPA-IT2330 architecture was the best architecture obtained for an interval type-2 fuzzy system, of the 8 membership functions in 7 the IT2FLS was better for 30 and 100 dimensions (Tables 11 and 12).
As future work, we can perform experiments with more mathematical functions CEC2013 and CEC2017, we can also perform experiments with other dimensions: 5, 10, 50, 50, 200 and 500 with these last two surely the computational cost will be high, we can also perform experiments with other architectures of interval type-2 fuzzy systems and finally we can perform experiments with generalized type-2 fuzzy systems.

