











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1 Introduction
This work presents analog algorithms with discontinuous states and non-unique evolution operators. Bournez, Dershowitz and Neron [1] have formalized a generic notion of analog algorithm. They provide postulates defining analog algorithms in the spirit of those given for discrete algorithms [2], and continue proving some completeness results. The notions of analog algorithm and dynamical system are postulated to be equivalent.
Retchkiman and Dershowitz [3] have studied the stability and stabilization concepts for analog algorithms. They first considered the stability and stabilization issues concentrating in continuous and discrete dynamical systems i.e., analog algorithms described by differential or difference equations. This paper extends these results considering Lyapunov energy functions for analog algorithms with continuous and discontinuous states which applies to many classes of dynamical systems including hybrid systems and switched systems. Dynamical systems with non-unique evolution operators are also presented.
The paper is organized as follows. In section 2, the paper written by Retchkiman and Dershowiz related to analog algorithms is first reviewed. The stability and stabilization concepts for analog algorithms are defined. Section 3 presents an application example. Section 4 discusses the stability concept for analog algorithms with continuous and discontinuous states in terms of Lyapunov energy functions, and finally section 5 discusses analog algorithms for dynamical systems with non-unique evolution operators.
2 Analog Algorithms, the Church-Turing, Stable Algorithms and Stabilization of Unstable Analog Algorithms
In this section, the work presented in [3] and the references therein is recalled.
Definition 1. A dynamical system is a four-tuple
Remark 2. Note that in our definition of dynamical system, it is allowed to have, in general, more than one evolution operator.
Dynamical systems are classified based on the properties of
When
A dynamical system is generally defined by one or more differential or difference equations There are other important classes of dynamical systems as those defined by continuous differential equations, functional differential equations, semi-groups, to mention some.
Remark 3. When dealing with continuous dynamical systems determined by ordinary differential equations on
For discrete dynamical systems determined by difference equations,
Definition 4. A dynamical system is said to be computable if and only if it is family of evolution operators (also called its trajectories) are obtained as solutions of its mathematical model.
Postulate A. An analog algorithm is a dynamical system.
Definition 5. A vocabulary
Definition 6. A state transition system, consists of a set of states
Postulate B (Abstract state). States are first order structures with equality, sharing the same fixed, finite vocabulary. States and initial states are closed under isomorphism. Transitions preserve the domain, and transitions and isomorphisms commute.
Definition 7. An abstract transition system is a state transition system, whose function symbols
Postulate C. An analog algorithm is an abstract transition system.
Definition 8. If
Definition 9. An infinitesimal generator is a function
Definition 10. A semantics
Definition 11. The infinitesimal generator associated with a semantics
Remark 12. When
Remark 13. From now on, we assume that some semantics
Postulate D. For any analog algorithm, there exists a finite set
Definition 14. An abstract state machine, or
An abstract state machine
for terms
In addition to the rule of the
Definition 15. If each
then:
is a rule which executes them in parallel, with
Definition 16. A rule of the form
is also a rule, with
Definition 17. If
The following result plays a fundamental role in the proof of the Church thesis for analog algorithms.
Theorem 18. For every algorithm of vocabulary
Example 19. Let us consider a simple pendulum whose dynamics is described by the following second order differential equation
Example 20. [5] A discrete event system, is a dynamical system whose state evolves in time by the occurrence of events at possibly irregular time intervals. Place-transitions Petri nets (commonly called Petri nets) are a graphical and mathematical modeling tool applicable to discrete event systems in order to represent its states evolution, whose mathematical model is given in terms of difference equations.
The matrix difference equation describing the dynamical behavior of a Petri net with
This evolution is described by its associated set of updates (with
Notice that if
Equation (3) would result in an
The proposed model can also adequately describe hybrid systems, made of alternating sequences of continuous evolution and discrete transitions.
Example 21. Let us consider a simple model of a bouncing ball, a classic example of a hybrid dynamical system, whose mathematical model is given by the equations
Its evolution is described by its associated set of updates (with
Definition 22. A
Definition 23. An analog algorithm is a
We are assuming for that for each dynamical system, the trajectories can be computed from the description of its dynamical system. (As for example, in the case of nonlinear differential equation, the Lipschitz conditions are satisfied, etc). In other words not all dynamical systems are contemplated just those of them which guarantee their existence.
Definition 24. A semantics
Theorem 25. Assuming
Theorem 26. (The Church thesis for analog algorithms) The dynamical system is computable if and only if the
If the dynamical system is computable (recall definition 33) there exists a procedure (algorithm) which computes its trajectories from its mathematical model description and therefore, the
2.1 Stability and Stabilization of Analog Algorithms
In this section, we will focus our attention to study the class of continuous and discrete-time dynamical systems defined by differential or difference equations, leaving other types for future work. We will begin by recalling some basic definitions in stability theory for this class [5, 7].
Definition 27. Stability
We say that state
— Let us consider a dynamical system represented by the following difference equation:
We say that state
Now, let us divide the set of structures i.e., the set of states of the dynamical system, in unstable and stable sets
Definition 28. An analog algorithm is said to be stable if and only if the dynamical system is stable if and only if the unstable structures are empty or they are not attained as the program of the
A clear example of an unstable analog algorithm is the one defined for chaotic dynamical systems.
Let us suppose that it is possible to pass from unstable structures to stable structures by properly defining the rules of the
Definition 29. An analog algorithm is said to be stabilizable if and only if it is possible to avoid the unstable structures by properly defining the rules of the
3 Discrete Event Dynamical Systems: A Case Study, [5, 6]
A discrete event system, is a dynamical system whose state evolves in time by the occurrence of events at possibly irregular time intervals. Place-transitions Petri nets (commonly called Petri nets) are a graphical and mathematical modeling tool applicable to discrete event systems in order to represent its states evolution.
Timed Petri nets are an extension of Petri nets that model discrete event systems where now the timing at which the state changes is taken into consideration. One of the most important performance issues to be considered in a discrete event dynamical system is its stability. By proving stability one is allowed to preassigned the bound on the discrete event systems dynamics performance (the reader not familiar with these concepts is encouraged to see [4, 5, 6] and the references quoted therein).
Consider a two server queuing system (Fig. 1.) whose timed Petri net
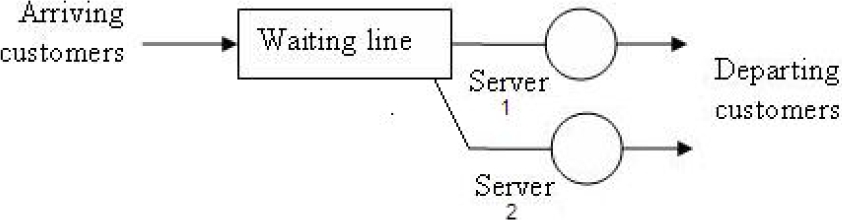
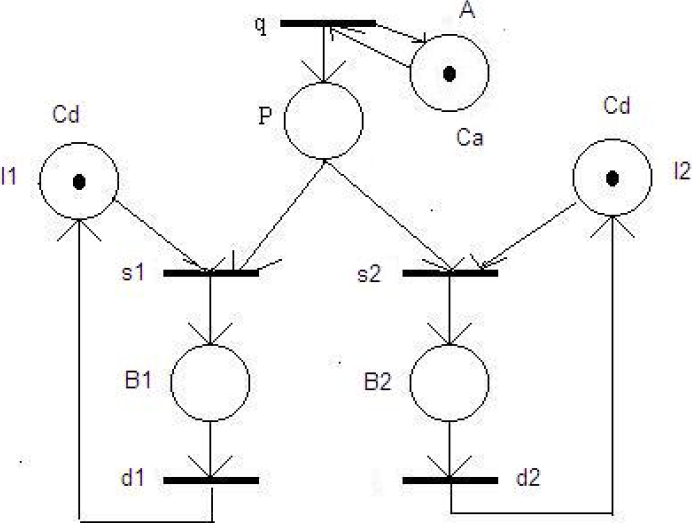
The places (that represent the states of the queue) are: A: customers arriving, P: the customers are waiting for service in the queue, B1, B2: the customer is being served, I1, I2: the servers are idle. The holding times associated to the places A and I1, I2 are
The
We have already discussed a
We conclude that by choosing properly the rules of the program
4 Stability of Analog Algorithms in Terms of Lyapunov Energy Functions for Analog Algorithms with Continuous and Discontinuous States
In this section, we consider the stability concept for analog algorithms with continuous and discontinuous states in terms of Lyapunov energy functions. The results presented in this section, become a generalization of what was discussed in subsection 2.1 and section 3, and includes them as particular cases. It applies to many classes of discontinuous dynamical systems including hybrid systems and switched systems. We will deal with analog algorithms whose states are structures of vocabulary
Definition 30. Let us consider an analog algorithm, we will say that the state
Definition 31. Let us consider an analog algorithm, we will say that the state
Definition 32. A continuous function
Postulate E. The Lyapunov energy function associated to the analog algorithm at its starting time point
Theorem 33.Let us consider an analog algorithm with the possibility of having discontinuous states at points
for all
We want to show that there exists a
Here postulate E has been used in the second inequality and the equation
It is worth mentioning that the preceding analysis applies to many classes of discontinuous dynamical systems, including hybrid systems and switched systems.
An example of a stable analog algorithm whose Lyapunov function satisfies the conditions imposed by theorem 33 is the one provided in [8], which consists of a ball in a constant gravitational field bouncing inelastically on a flat vibrating table. It is interesting to see how the Lyapunov function, proposed in the cited paper, monotonically decreases as
Consider the switched system defined by the following scalar differential equation:
where
5 Dynamical Systems with Non-Unique Trajectories
For continuous dynamical systems defined by differential ordinary differential equations, it is well-known that the continuity of the dynamical system does not guarantee uniqueness of solutions. Likewise, for discontinuous dynamical systems, uniqueness of solutions is not guaranteed in general, either no matter what notion of solution is chosen.
The lack of uniqueness of solutions generally requires a little bit of extra analysis because, we need to take into account the possibly multiple solutions starting from each initial condition.
This multiplicity leads us to consider the stability concept together with the adjectives total and partial. Roughly speaking, total is used when the stability property is satisfied for all solutions starting from each initial condition.
On the other hand, partial is used when the stability property is satisfied by at least solutions starting from each initial condition. Locally Lipschitz is the most common requirement invoked to guarantee uniqueness of solution.
Example 36. Consider the dynamical system defined by the following ordinary differential equation:
which is continuous everywhere, and locally Lipschitz on
Definition 37. An analog algorithm for non unique evolution operators is the Cartesian product of analog algorithms, where each one of the analog algorithms that belong to the Cartesian product satisfy all what was discussed in section 2.
Postulate E. An analog algorithm for non unique evolution operators is a dynamical system
Remark 38. From definition (37) by taking Cartesian products, it is immediate to generalize all the properties of analog algorithms, (given in section 2), to analog algorithms for non unique evolution operators, where now we have an
Continuing with our previous example, the
—
—
The set of updates is given by

