











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
El color es una característica de bajo nivel que brinda información relevante en diversas aplicaciones en visión por computador [1]. El color de un objeto puede representarse mediante la distribución espectral de potencia en un amplio rango de longitudes de onda, sin embargo esta representación no guarda correspondencia con la forma en que los conos de la retina humana captan la luz en solo tres bandas espectrales (Rojo: ~600nm, Verde: ~550nm y Azul: ~460nm) [2]. Debido a esto, se han propuesto diversos espacios de color [3], usualmente de tres dimensiones [4], que representan la reacción humana ante los estímulos en las tres longitudes de onda mencionadas[5]. Así, la información contenida en las imágenes de color se relaciona directamente con la escena y se codifica de acuerdo con el espacio de color utilizado. Los espacios de color HSV y HSV son ampliamente usados por su capacidad de desacople en la información de cromaticidad e intensidad, sin embargo, debido a su geometría, los colores rojizos se separan y existen indeterminaciones en las componentes de cromaticidad asociadas a los tonos de gris. Con miras a disminuir estos inconvenientes, se propone un espacio no-perceptual basado en coordenadas esféricas que desacopla la cromaticidad de la intensidad sin desagrupar los colores correspondientes a las distintas tonalidades de rojo y permitiendo también encontrar distancias entre colores usando aproximaciones euclidianas.
Para validar el potencial del espacio propuesto, se aborda el problema de discriminación entre imágenes sintéticas realistas (Computer Graphics - CG) e imágenes naturales (Photographic Images - PG) [6,7,8,9]. Este problema toma cada día mayor relevancia en el ámbito judicial debido a la falsificación y adulteración de evidencias con imágenes sintéticas que presentan mayor realismo.
El resto del artículo se organiza de la siguiente manera: En la sección 2 se describen los principales espacios de color utilizados en procesamiento de imágenes. En la sección 3 se introduce el espacio de color RTP, junto con su geometría y las transformaciones RGB ↔ RTP. En la sección 4, se describe el problema de discriminación de imágenes sintéticas y reales, así como la metodología de evaluación del desempeño del espacio RTP. En la sección 5 se presenta el análisis de los resultados obtenidos. En la sección 6 se presentan las conclusiones sobre el espacio propuesto, donde se destaca la capacidad de desacople de la cromaticidad e intensidad respecto a los espacios de color HSI, HSV, RGB; y la capacidad de discriminación en el problema de diferenciación entre imágenes reales y sintéticas. Posteriormente, se muestran los agradecimientos a las personas e instituciones involucradas en el desarrollo de este trabajo. Finalmente, se listan las fuentes bibliográficas sobre las que se basó este trabajo.
2. Espacios de color
Los espacios de color, usualmente de tres dimensiones [4], permiten representar matemáticamente la reacción humana ante los estímulos de luz en las longitudes de onda correspondientes a los colores primarios Rojo, Verde y Azul [2]. Los espacios de color pueden clasificarse en perceptuales y no-perceptuales [1]. Los espacios Perceptuales buscan modelar los cambios de cromaticidad e intensidad percibidos por el sistema visual humano, para detectar las diferencias de la percepción del color mediante métricas.
Se destacan los espacios CIELAS, CIELUV y RLAB en los cuales la distancia euclidiana entre dos colores es proporcional a la diferencia percibida entre dichos colores [10]. Los espacios No-Perceptuales no conservan uniformemente los cambios de cromaticidad ni intensidad de la percepción humana. Entre los espacios no-perceptuales se destacan los espacios HSI, HSV, YIQ, YCbCr y el espacio de colores oponentes 010203 [10]. Adicionalmente, en estudios anteriores se ha representado las componentes H y S de los espacios HSI, HSV como ángulos en sistemas de coordenadas esféricas cuyo eje polar es la línea de grises R = G = B [11,12].
Los espacios perceptuales presentan ventajas respecto a los no-perceptuales debido a la relación directa de sus métricas con la percepción humana, sin embargo su adopción ha resultado lenta debido a su complejidad computacional y al requerimiento de calibración de los equipos involucrados [1]. Aspectos que hacen de los espacios no-perceptuales una alternativa conveniente para al procesamiento de imágenes, pues sus métricas resultan de fácil obtención a partir de los datos capturados por los sensores y para la mayoría de aplicaciones, no es necesario que correspondan fielmente a la percepción humana.
A continuación, para efectos de ilustración y comparación con el espacio propuesto, se describen tres espacios no-perceptuales de color de amplio uso.
2.1. Espacio RGB
El espacio RGB es un estándar que se usa en la mayoría de dispositivos de captura y visualización de imágenes. Se basa en la adición de los iluminantes primarios Rojo, Verde y Azul, generando una representación rectangular de tres dimensiones con origen en el negro y cuyos vectores generadores corresponden a los iluminantes primarios.
En este espacio, un color C es descrito por una terna de valores (CR, CC, CB) que representan la intensidad asociada en cada una de las bandas mencionada, sin embargo, no es lineal con respecto a la percepción visual humana. La Fig. 1 ilustra los colores obtenidos por los planos Red = 1, Green = 0 y Blue = 1.
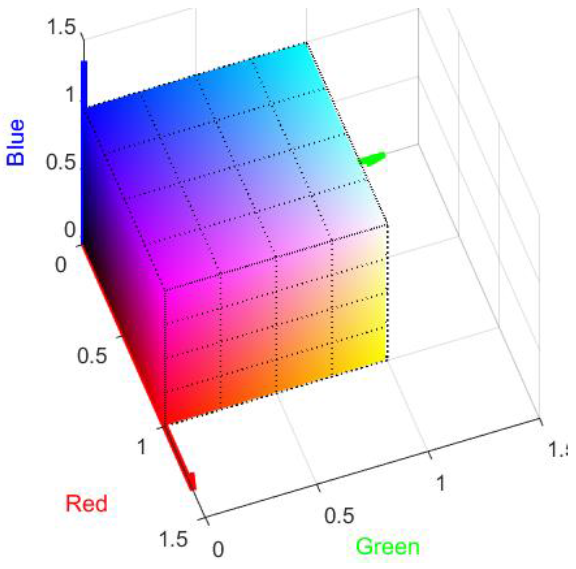
Fig. 1 Cubo de color en el espacio RGB. Las fronteras de este cubo son los colores pertenecientes a los planos Red = 0, Green = 0, Blue = 0, Red = 1, Green = 1 y Blue = 1
Los colores C1 y C2 que
representan la misma cromaticidad con distinta intensidad se describen en el
espacio RGB como:
2.2. Espacios HSI y HSV
En este espacio, un color C es descrito mediante una terna de
valores
(CH,CS,CI).
Inicialmente, se define C’ como la intercepción entre el segmento de línea
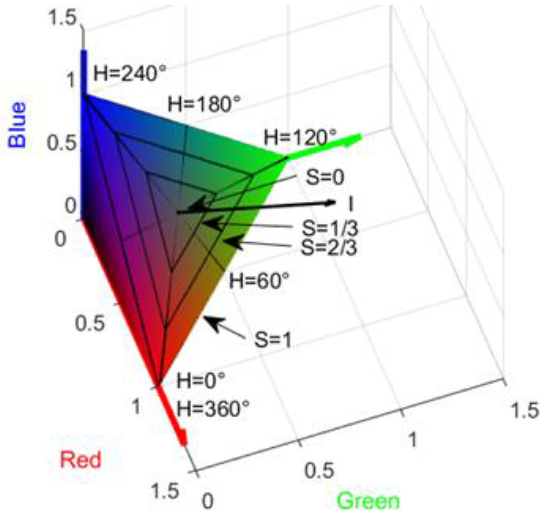
Después, se define la componente CH como el ángulo
izquierdo medido sobre el plano R + G + B = 1 desde la línea
Finalmente, la componente CI corresponde a la intensidad de C medida como la proyección de C sobre la línea de grises. Las expresiones de transformación RGB → HSI son:
La Fig. 2 ilustra la relación de los componentes entre los espacios HSI y RGB.
Los espacios HSI y HSV tienen las mismas componentes de cromaticidad, y difieren en el valor de intensidad del color. La transformación RGB → HSV se define como:
Dos colores que representan la misma cromaticidad con diferentes intensidades se
representan en el espacio RGB como
A partir de las transformaciones de la ecuación (2), se representan en el espacio
HSV como
En los espacios HSV y HSI, se presentan indeterminaciones en las componentes H asociadas a los tonos grises. Además, para el color negro, se indetermina también la componente S.
3. Espacio RTP
Tomando como base el espacio RGB, se define una esfera de radio unitario cuyo centro se ubica en el origen, que corresponde al color negro. Se define el plano π1 que contiene los colores: negro (0,0,0), azul (0,0,1) y blanco (1,1,1).
También, se define el plano π2 de manera que contenga la recta de grises (R = G = B) y sea perpendicular a π1. Las intercepciones de los planos π1 y π2 con la esfera, definen los círculos máximos CM1 y CM2 respectivamente (ver Fig. 3).

Aunque la esfera mencionada contempla puntos en todos los octantes del espacio RGB, los colores solo están definidos para el octante en el cual {R,G,B}≥0.
Partiendo de la geometría descrita, se propone un espacio de color esférico llamado RTP (Rho,Theta,Phi) en el que un color CRTP se representa como una terna de valores en un sistema de coordenadas esféricas (Cρ,Cθ,Cφ) con origen 0 en el color negro. Cada una de las componentes en el espacio RTP se describen a continuación:
— Cρ es la norma de
— Cθ es el ángulo que forma
— Cφ es el ángulo que forma
Las componentes angulares (Cθ,Cφ) corresponden a los arcos sobre la esfera unitaria medidos a partir de los círculos máximos CM1 y CM2, como se muestra en la ecuación 3.
Dadas estas definiciones, la transformación de colores, RGB → RTP se define como:
donde, (Cρ,Cθ,Cφ) son las coordenadas en el espacio RTP de un color C con coordenadas (CR, CG, CB), en el espacio RGB.
La transformación inversa, RTP → RGB queda determinada por:
Dos colores con la misma cromaticidad pero con diferentes intensidades (afectado por
k), se representan en el espacio
RTP, usando la transformación RGB →
RTP (ecuación (3)), como
A partir de las ecuaciones de transformación , RGB → RTP y RTP → RGB (3) y (4), se deduce que:
— Las componentes (Cθ,Cφ) del espacio RTP se indeterminan para el color negro; sin embargo, este color queda completamente definido con la componente radial Cρ = 0. En el espacio RGB, el negro es representado por la terna (0,0,0).
— La recta (Cρ,0,0) es la recta de tonos de grises. En el espacio RGB, la recta de grises es representada por la terna (k,k,k) con 0 ≤ k ≤ 1
— La trayectoria (1,0,Cφ) muestra el cambio de amarillo a azul pasando por el gris, con una intensidad unitaria (Fig. 4).
— La trayectoria (1,Cθ,min Cφ) muestra el cambio de rojo a verde pasando por el amarillo con una intensidad unitaria (Fig. 4).
— La componente radial Cρ contiene la información de intensidad, dejando la información de cromaticidad contenida en las componentes angulares (Cθ,Cφ).

La Fig. 5 muestra una imagen sintética a color, el círculo cromático, la cual exhibe un amplio rango de cromaticidades.
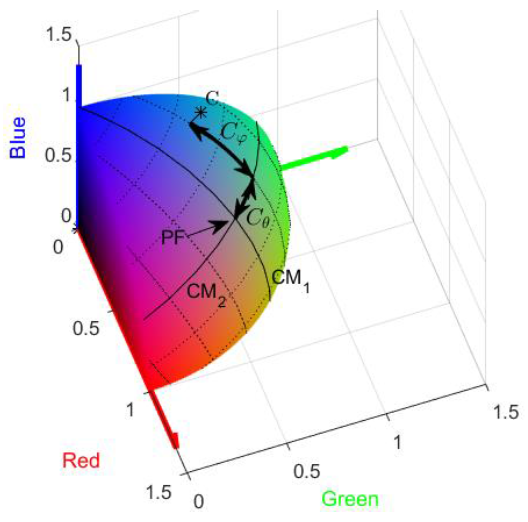
Fig. 5 Casquete de colores de intensidad unitaria con separación cada 15°. El punto fundamental PF tiene coordenadas esféricas (1,0,0). Un color arbitrario C , de coordenadas esféricas (Cρ,Cθ,Cφ) es proyectado sobre la esfera unitaria en las coordenadas (1, Cθ,Cφ)
Las componentes correspondientes a los espacios de color RGB, HSV, HSI y R TP para el círculo cromático se muestran en la Fig. 6, en la que se observa que existe una relación directa entre la componente I del espacio HSI y la componente p del espacio RTP.
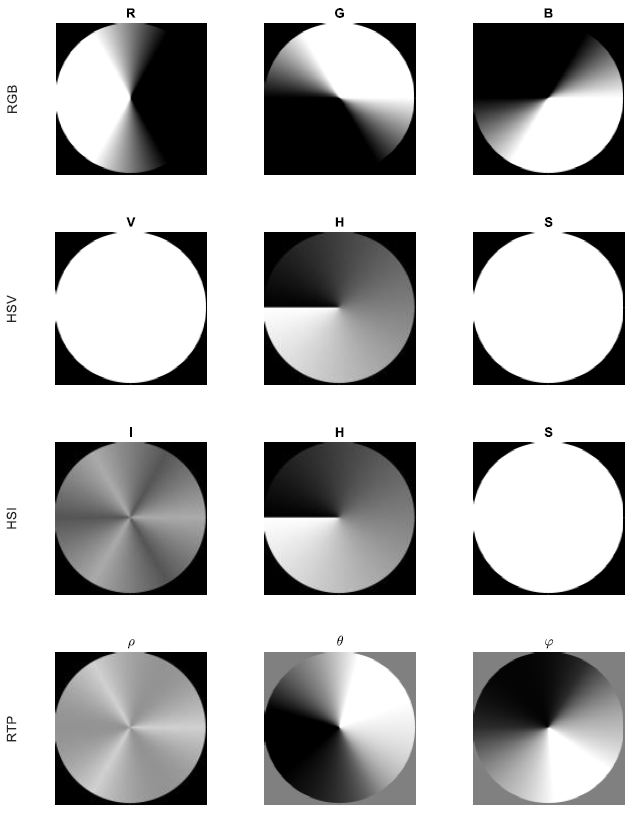
Las componentes (H, S) de los espacios HSV y HSI codifican, de la misma manera, la cromaticidad de la imagen y presentan un cambio abrupto en la zona correspondiente a los rojos, aunque las cromaticidades son cercanas. Este cambio no se presenta en las componentes (θ,φ) del espacio RTP, lo cual constituye una ventaja en la descripción de colores, pues las diferencias entre dos colores son siempre consistentes.
4. Evaluación
El espacio RTP puede aplicarse a todos los problemas de visión artificial donde el color es un elemento diferenciador. Para efectos de validar su utilidad, se compara el desempeño entre los espacios RGB, HSI y HSV y RTP en el problema de discriminación entre imágenes sintéticas realistas generadas por computador (Computer Graphics - CG) e imágenes naturales capturadas por sensores fotosensibles (Photographic Images - PG) [6]. Este problema es un tema de investigación abierto [6,7,8,9] y de alta complejidad debido al avance del software y la sofisticación de los equipos de cómputo [6] para crear imágenes sintéticas con un alto grado de realismo.
Como las imágenes sintéticas no representan escenas reales, podrían llevar a los seres humanos a la toma de decisiones basados en información falsa. Por esta razón, cobra especial importancia poder discriminar las imágenes sintéticas [7,8,9]. La Fig. 7 ilustra dos imágenes naturales y dos imágenes sintéticas que podrían interpretarse como naturales. Estas imágenes fueron tomadas del Banco de Imágenes Fotográficas y Gráficos Computarizados Fotorrealistas desarrollado en la Universidad de Columbia [21]. Para evaluar cuantitativamente el desempeño de un espacio de color respecto a otro se adoptó el protocolo propuesto en [7], el cual se ha utilizado ampliamente para la discriminación de imágenes reales y sintéticas. Este protocolo incluye una etapa de extracción de características y una de clasificación que se describen a continuación:

Fig. 7 Muestras del banco de imágenes [21]. En la columna izquierda: Imágenes naturales. En la columna derecha: Imágenes sintéticas
4.1. Extracción de características
Para asignar una de las clases planteadas (CG o PG) a una imagen, los momentos estadísticos de funciones características aplicadas a imágenes
Para asignar una de las clases planteadas (CG o PG) a una imagen, los momentos estadísticos de funciones características aplicadas a imágenes descompuestas mediante la transformada Wavelet se utilizan como descriptores.
El histograma de una imagen digital I, o una de sus sub-bandas Wavelet, cuyos valores de intensidad corresponden a una variable aleatoria, es una función de densidad de probabilidad h(I) de divisiones. Se define entonces, una función característica H(I) como la transformada de Fourier de h(I) y el n-esimo momento estadístico de H(I) de acuerdo con la expresión de la Ecuación (5) [7]:
Sea Ix una imagen en el espacio de color X. Cada componente de Ix se descompone en 3 niveles mediante la transformada Haar Wavelet. En cada nivel i = 1,2,3, existen 4 sub-bandas (Aproximación, Horizontal, Vertical y Diagonal), por lo cual, considerando que la componente de Ix es la sub-banda de nivel i=0, se tienen 13 sub-bandas, de las que se extraen los 3 primeros momentos estadísticos definidos en la Ecuación (5).
De estas sub-bandas se obtienen 39 características asociadas a cada componente de color en el espacio X. De la misma forma, se definen 39 características para la imagen de error de predicción en la componente de color correspondiente.
Así, en los espacios tridimensionales de color, los vectores característicos son de 234 dimensiones. La imagen de error de predicción se estima como la diferencia entre una imagen y su versión predicha. El algoritmo de predicción utilizado está dado por:
donde
El contexto del pixel x se define por la posición relativa de los píxeles a, b, c que se muestra en la Fig. 8.
4.2. Clasificación
Como clasificador se utiliza una Máquina de Vectores de Soporte, SVM, con kernel Función de Base Radial, RBF. La SVM es un algoritmo de aprendizaje de máquinas basado en la teoría de aprendizaje estadístico y se usa ampliamente en problemas de reconocimiento de patrones.
La SVM se implementa con LIBSVM, una librería abierta de aprendizaje de máquinas desarrollada en la National Taiwan University [22].
Se emplea el método de búsqueda en grilla para definir los valores óptimos para los parámetros de regularización y dispersión (C,γ) del kernel RBF [23].
La precisión asociada a cada combinación (C,γ) se encuentra mediante el proceso de validación cruzada con 10--fold dejando uno afuera.
5. Resultados
Inicialmente, se buscan los parámetros óptimos (C,γ) que maximizan la precisión promedio en la clasificación para cada espacio de color evaluado. La clasificación promedio se encuentra mediante la validación cruzada 10-fold dejando uno afuera.
La figura 9 ilustra las superficies de precisión obtenidas para cada espacio de color evaluado y se resaltan, con asteriscos, los puntos óptimos de cada una.
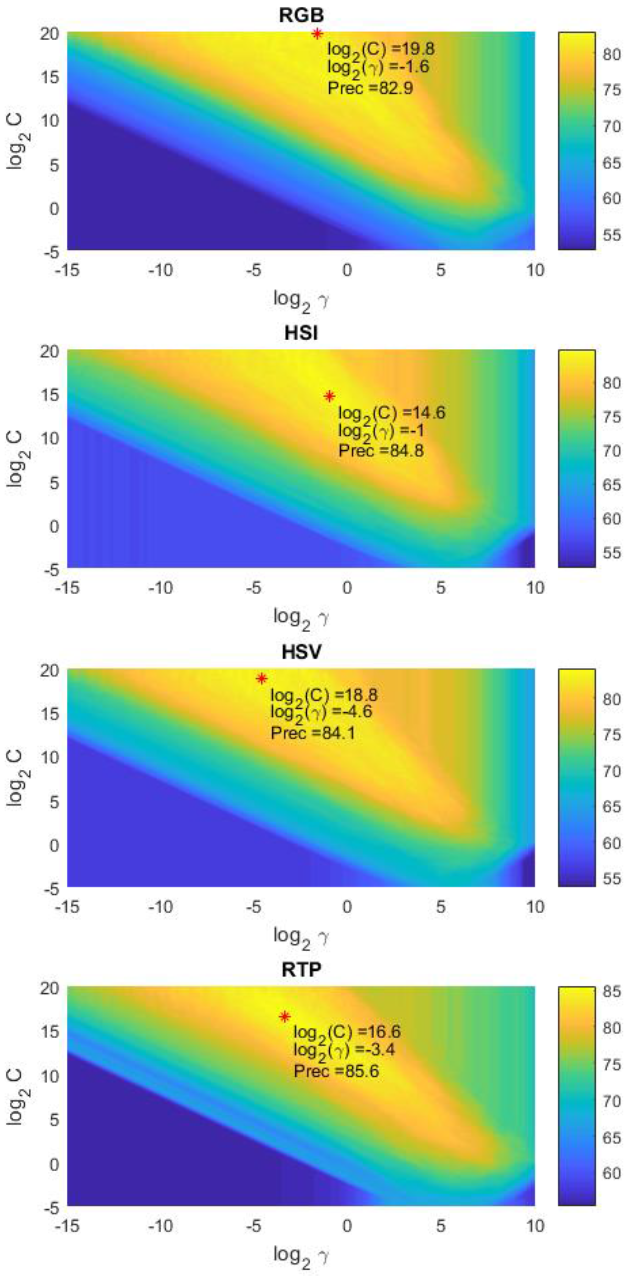
En la Tabla 1 se listan los valores (C,γ) óptimos que se identificaron en las superficies de precisión mencionadas.
Tabla 1 Parámetros óptimos (C,γ) para los clasificadores
| Espacio | C | γ |
|---|---|---|
| RGB | 219.8 | 2−1.6 |
| HSI | 214.6 | 2−1 |
| HSV | 218.8 | 2−4.6 |
| RTP | 217.8 | 2−4.8 |
Para comparar el efecto de los espacios de color sobre la clasificación, se obtuvo la media de la precisión en clasificación sobre 20 ejecuciones del experimento con los valores óptimos (C,γ) identificados para cada espacio de color (ver Tabla 2). En cada ejecución, se seleccionaron aleatoriamente 5/6 partes del banco de imágenes (1334 imágenes) para conformar el conjunto de entrenamiento. El resto del banco de imágenes (266 imágenes) se utilizó como conjunto de prueba.
Tabla 2 Estadísticos de precisión para los espacios de color evaluados
| Espacio | Promedio % | Desviación estándar |
|---|---|---|
| RGB | 80.83 | 2.09 |
| HSI | 83.76 | 2.37 |
| HSV | 82.58 | 2.19 |
| RTP | 84.55 | 1.64 |
Tabla 2 muestra el promedio y la desviación estándar de las precisiones obtenidas en las 20 ejecuciones para cada espacio de color evaluado, donde se encuentra que el mejor desempeño se obtiene con el espacio RTP, pues tiene la mayor precisión media (84.55%) con la menor desviación estándar (1.64) en el conjunto evaluado.
La Fig. 10 muestra el diagrama de caja de las precisiones obtenidas con cada espacio de color, y el respectivo análisis de varianza ANOVA de una vía. Como P = 1.65E - 6 < 0.05, puede afirmarse que existen diferencias estadísticamente significativas entre los clasificadores y que, debido a que en el protocolo de pruebas desarrollado se varía únicamente el espacio de color, esta diferencia puede ser atribuida a los espacios de color evaluados.
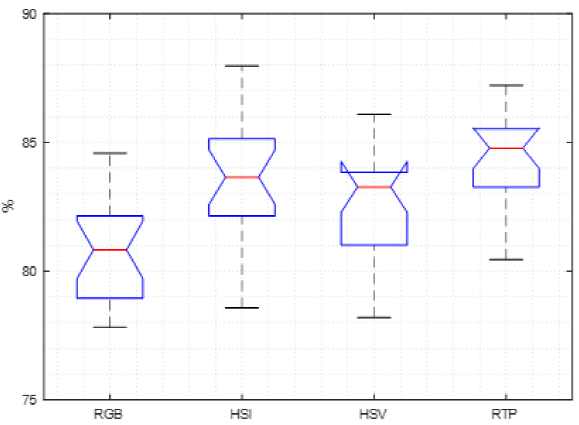
Fig. 10 Prueba ANOVA para la precisión en la clasificación de imágenes naturales y sintéticas sobre 20 ejecuciones usando los espacios de color RGB, HSI, HSV y RTP
Los intervalos de confianza, con un nivel de confianza de 95%, correspondientes a la precisión media en la clasificación asociada a cada espacio de color se muestran en la Fig. 11. El espacio tiene diferencias estadísticamente significativas respecto a los espacios HSI, HSV y RTP ubicándose como el de menor desempeño en la clasificación. Por su parte, el espacio HSI tiene diferencias estadísticamente significativas solamente respecto al espacio RGB.
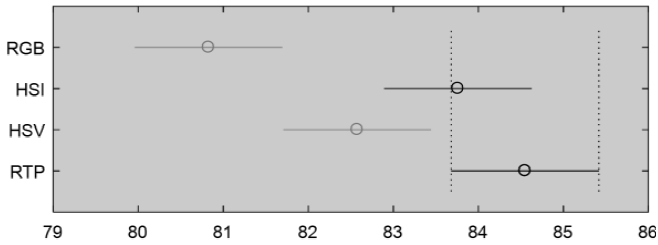
Fig. 11 Intervalos de confianza en la identificación de imágenes generadas por computador para los espacios de color evaluados
El espacio HSV presenta diferencias estadísticamente significativas y muestra un mejor desempeño que el espacio RGB, a la vez que presenta diferencias estadísticamente significativas y muestra un peor desempeño que el espacio RTP. El espacio propuesto presenta diferencias estadísticamente significativas con los espacios RGB y HSV con un mejor desempeño que estos. Aunque no existen diferencias estadísticamente significativas con el espacio HSI, puede observarse que hay leves mejoras en el desempeño.
Por lo anterior, y teniendo en cuenta que el valor promedio de precisión asociado al espacio RTP es mayor, puede afirmarse que este espacio constituye una mejora en la representación de color al compararse con los espacios RGB, HSI y HSV.
6. Conclusión
En este artículo se propuso un espacio no perceptual de color que permite describir los colores mediante coordenadas esféricas. En este espacio, como ocurre con los espacios HSI y HSV, que son ampliamente usados por la comunidad científica en el área de procesamiento digital de imágenes en color, se desacopla la información de cromaticidad de la información de intensidad.
Sin embargo, debido a la geometría del espacio RTP, no se desagrupan los colores correspondientes a las distintas tonalidades de rojo, permitiendo también encontrar distancias entre colores de manera directa y cercana a la perceptual.
En el problema de identificación de imágenes generadas por computador, el espacio de color RTP usado en la etapa de extracción de características, permitió que las características aumentaran su capacidad de discriminación mejorando los resultados obtenidos respecto a los espacios HSI y RGB. Esto permite afirmar que el espacio RTP tiene potencial en diversas aplicaciones de procesamiento de imágenes en color.

