1 Introduction
This paper analyzes the path not for a non-linear system but for a network of
nonlinear systems coupled with delay, which are forced to follow a reference signal
generated by a non-linear chaotic system. The control law that guarantees trajectory
tracking is obtained using the Lyapunoc-Krasovskii methodology and the PID control
law. The control law that guarantees trajectory tracking is obtained by using the
Lyapunov methodology and the Fractional Order PID Control Law. It is interesting to
note that more than half of the industrial controllers in use today are PID
controllers or modified PID controllers. The proportional action tends to stabilize
the system, while the integral control action tends to eliminate or reduce
steady-state error in response to various inputs.
Derivative control action, when added to a proportional controller, provides a means
of obtaining a controller with high sensitivity. An advantage of using derivative
control action is that it responds to the rate of change of the actuating error and
can produce a significant correction before the magnitude of the actuating error
becomes too large.
Derivative control thus anticipates the actuating error, initiates an early
corrective action, and tends to increase the stability of the system. The
combination of proportional control action, integral control action, and derivative
control action is termed proportional-plus-integral-plus-derivative control action.
It has the advantages of each of the three individual control actions.
A Fractional Order PID controller, also known as a PIλDα controller, takes on the form [1]:
ut=Kpet+KiaDt-λet+KdaDtαet,
where λ and α are the fractional orders of the controller and
e(t) is the system error. Note that the system
error e(t) replaces the general function
f(t).
The analysis and control of complex behavior in complex networks, which consist of
dynamical nodes, has become a point of great interest in recent studies
[2,3,4]. The complexity in networks comes from
their structure and dynamics but also from their topology, which often affects their
function.
Recurrent neural networks have been widely used in the fields of optimization,
pattern recognition, signal processing and control systems, among others. They have
to be designed in such a way that there is one equilibrium point that is globally
asymptotically stable.
Trajectory tracking is a very interesting problem in the field of theory of systems
control; it allows the implementation of important tasks for automatic control such
as: high speed target recognition and tracking, real-time visual inspection, and
recognition of context sensitive and moving scenes, among others. We present the
results of the design of a control law that guarantees the tracking of general
fractional order complex dynamical networks.
2 Mathematical Models
2.1 Fractional General Complex Dynamical Network
In this work we use Caputo's fractional operator which is defined, for 0
<α<1, by:
xαt=Dtα0cxt=1Γ1-α∫0tx'τt-τ-αdτ.
If t∈Rn , we consider that xαt is the Caputo fractional operator applied to each entry:
xαt=Dtα0cxi1t,…,Dtα0cxintT.
Consider a network consisting of N linearly and diffusively
coupled nodes, with each node being an n-dimensional dynamical system, described
by:
xiα=fixi+∑j=1j≠iNcijaijΓxj-xi,i=1,2,…,N,
where xi=xi1,xi2,…,xinT∈Rn are the state vectors of node i,fi:Rn↦Rn represents the self-dynamics of node i, constants
c
ij > 0 are the coupling strengths between node i
and node j,with i, j =
1,2,..., N.
Γ=τij∈Rn×n is a constant internal matrix that describes the way of linking the
components in each pair of connected node vectors
(xj - xi): that is
to say for some pairs (i, j) with 1 ≤
i, j ≤ n and
τij
≠ 0 the two coupled nodes are linked through their
ith and jth sub-state variables,
respectively.
While the coupling matrix A=aij∈RN×N denotes the coupling configuration of the entire network: that is to
say if there is a connection between node i and node
j(i ≠ j), then
aij = aji = 1;
otherwise aij =
aji= 0.
2.2 Fractional Time-Delay Recurrent Neural Network
Consider a fractional delayed recurrent neural network in the following form:
xniα=Anixni+Wniσxint-τ+uin+∑j=1j≠iNcinjnainjnΓxjn-xin,
i=1,2,…,N,
(2)
where xin=xin1,xin2,…,xinnT∈Rn is the state vector of neural network i,
uin ∈ ℝn is the input of neural
network i,Ain=-λinIn×n,i=1,2,…N , is the state feedback matrix, with λin being a positive
constant, Win∈Rn×n is the connection weight matrix with i = 1, 2, …,
N, and σ⋅∈Rn is a Lipschitz sigmoid vector function [5,6], such that σxin=0 only at xin = 0, with Lipschitz constant Lσi,i=1,2,…,N and neuron activation functions σi⋅=tanh⋅,i=1,2,…,N where xi=xi1,xi2,…,xinT∈Rn are the state vectors of node i,fi:Rn↦Rn represents the self-dynamics of node i, constants
cij > 0 are the coupling strengths between
node i and node j, with i, j = 1,2,...,
N. Γ=τij∈Rn×n is a constant internal matrix that describes the way of linking the
components in each pair of connected node vectors
(xj - xi) : that is
to say for some pairs (i, j) with 1 ≤ i, j ≤
n and τij ≠ 0 the two coupled nodes are linked
through their ith and jth sub-state variables,
respectively.
While the coupling matrix A=aij∈RN×N denotes the coupling configuration of the entire network: that is to
say if there is a connection between node i and node
j(i ≠ j), then
aij = aji = 1 ;
otherwise aij = aji =
0.
3 Trajectory Tracking
The objective is to develop a control law such that the ith fractional delayed neural
network (2) tracks the trajectory of the ith fractional dynamical system (1). We
define the tracking error as ei =
xin - xi,
i = 1, 2, …, N whose time derivative is:
xiα=xiniα-xiα, i=1,2,…,N.
(3)
From (1, 2, 3), we obtain:
eiα=Ainxin+Winσxint-τ+uin-fixi+
∑j=1j≠iNcinjnainjnΓxjn-xin-
∑j=1j≠iNcijaijΓxj-xi,i=1,2,…,N.
(4)
Adding and subtracting, Winσxit-τ,αit, i=1,2,…,N, to (4), where αi is defined below, and considering that
xin = ei +
xi, i = 1,2,...,
N, then:
eiα=Ainei+Winσei+xit-τ-σxit-τ+
uin-αi+Ainxi+Winσxit-τ+αi-
fixi+∑j=1j≠iNcinjnainjnΓxjn-xin,
(5)
∑j=1j≠iNcijaijΓxj-xi, i=1,2,…, N.
In order to guarantee that the ith neural network (2) tracks the ith
reference trajectory (1), the following assumption has to be satisfed:
Assumption 1. There exist functions ρi(t) and
αi(t), i = 1, 2, …, N, such
that:
ρiαt=Ainρit+Winσρit+αit
ρit=xit,i=1,2,…,N.
(6)
Let's us define:
u~in=uin-αi
ϕσei,xit-τ=σei+xit-τ-σxit-τ,
i=1,2,…,N.
(7)
From (6, 7), equation (5) is reduced to:
eiα=Ainei+Winϕσei,xit-τ+u~in+
∑j=1j≠iNcinjnainjnΓxjn-xin-
∑j=1j≠iNcijaijΓxj-xi,
(8)
i=1,2,…,N.
We can also write:
∑j=1j≠iNcinjnainjnΓxjn-xin
=Γ∑j=1j≠iNcinjnjainjnxjn-xin∑j=1j≠iNcinjnainjn
∑j=1j≠iNcijaijΓxj-xi,
(9)
=Γ∑j=1j≠iNcijaijxj-xi∑j=1j≠iNcijaij,
i=1,2,…,N,
where we used that cinjn =
cij and ainjn =
aij.
Then, with the above equation, equation (8) becomes:
eiα=Ainei+Winϕσei,xit-τ+u~in+
Γ∑j=1j≠iNcijaijej-ei∑j=1j≠iNcijaij,
(10)
=Aniei+Winϕσei,xit-τ+u~in+
∑j=1j≠iNcijaijΓej-ei,
i=1,2,…,N.
It is clear that ei = 0, i = 1,2,..., N
is an equilibrium point of (10), when u~in=0,i=1,2,…,N . Therefore, the tracking problem can be restated as a global asymptotic
stabilization problem for the system (10).
4 Tracking Error Stabilization and Control Design
In order to establish the convergence of (10) to ei = 0,
i = 1, 2, …, N, which ensures the desired
tracking, first, we propose the following candidate Lyapunov-Krasovskii function
[7]:
VNe=∑i=1NVei=
∑i=1N12eiT,wiTei,wiT+
(11)
∫t-τtϕσTsWniTWniϕσsds.
In fractional calculus, the product rule for the derivative is no longer valid.
However, we still have an upper bound for the product that appears in (11).
Specifically, from Lemma 1 in [8] the time derivative of (11), along the
trajectories of (10), and adding the Derivative "D":
aDtαV=eiTaDtαei+wiTaDtαwi+ϕσTtWniTWniϕσt-ϕσTt-τWniTWniϕσt-τ,
aDtαV=eTaDtαei+KdaDtαeit+wiTaDtαwi+ϕσTtWniTWniϕσt-ϕσTt-τWniTWniϕσt-τ,
aDtαV=eiT1+KdaDtαeit+wiTaDtαwi+ϕσTtWniTWniϕσt-ϕσTt-τWniTWniϕσt-τ,
(12)
If a=1+Kd,α=λ, and wi=KiaDt-αeit, then aDtαwi=Kiet,[9]
aDtαV=∑j=1NaeiTAinei+Winϕσei,xit-τ+
u~in+∑j=1j≠iNcijaijΓej-ej+wiTkiet+
ϕσTtWniTWniϕσt-ϕσTt-τWniTWniϕσt-τ.
We can then write:
aDtαV=∑i=1N-aλinei2+
æi⊺Winϕσei,xi+aei⊺u~in+
a∑j=1j≠iNcijaijei⊺Γej-ej+wiTkiet
ϕσTtWniTWniϕσt-ϕσTt-τWniTWniϕσt-τ.
(13)
Next, let's consider the following inequality, proved in [10,11]:
X⊺Y+Y⊺X≤X⊺ΛX+Y⊺Λ-1Y,
(14)
which holds for all matrices X,Y∈Rn×k and Λ∈Rn×n with Λ=Λ⊺>0. Applying (14) with Λ=In×n to the term ei⊺Winϕσei,xi,i=1,2,…,N, we get:
ei⊺Winϕσei,xit-τ≤12ei⊺ei+
12ϕσ⊺ei,xit-τWin⊺Winϕσei,xit-τ
(15)
=12ei2+12ϕσ⊺ei,xit-τ×
Win⊺Winϕσei,xit-τ,
i=1,2,…,N.
Since ϕσ is Lipschitz, then:
ϕσei,xi≤Lϕσ1ei,i=1,2,…,N,
(16)
with Lipschitz constant Lϕσi. Applying (16) to 12ϕσ⊺ei,xiWin⊺Winϕσei,xi we obtain:
12ϕσ⊺ei,xiWin⊺Winϕσei,xi,
≤12ϕσ⊺ei,xiWin⊺Winϕσei,xi,
(17)
≤12Lϕσi2Win2ei2,i=1,2,…,N.
Next, (15) is reduced to:
ei⊺Winϕσei,xi
≤12ei2+12Lϕσi2Win2ei2
(18)
=121+Lϕσi2Win2ei2,i=1,2,…,N.
Then, we have that:
VNαe≤∑i=1NeT-aλinei-a∑j=1j≠iNcijaijΓei+
a21+Lϕσi2Win2ei+
(19)
wiTkiet+a∑j=1j≠iNcijaijei⊺Γej+aeiTu~ni
We define u~ni=u~~i+u~~ij+Kpiei+wi-γ21+Lϕσi2Win2,1,2,…,N, and from (19) we get:
VNαe≤∑i=1N-aλni-KpeiTei+
aγ-121+Lϕσi2Win2eiTei+
a+KieTwi-a∑j=1j≠iNcijaijΓei⊺ei
(20)
+a∑j=1j≠iNcijaijΓei⊺ei+aeTu~~i+aeTu~~ij.
Here we select a+ki=0, so, Kd=-Ki-1;Kd≥0, then Ki≥-1. With this selection of parameters (20) is reduced to:
aDtαV=VNαe≤∑i=1N-aλni-KpeiTei+
aγ-121+Lϕσi2Win2eiTei-
a∑j=1j≠iNcijaijΓei⊺ei+
a∑j=1j≠iNcijaijΓei⊺ej+aeTu~~i+aeTu~~ij.
In this part, if λni-Kp>0,a>0, then aDtαV<0,∀ei,wi,Wni, the traking error is asymptotically stable and it converges to zero for
every ei≠0; i.e. the Neural Network will follow the plant asymptotically.
Now, we propose to use the following control law:
u~ni=-1+Lϕσi2Win2e
-∑j=1j≠iNcijaijΓej,
(21)
i=1,2,…,N.
. In this case, VNαe<0,∀e≠0. This means that the proposed control law (21) can globally and
asymptotically stabilize the ith error system (10), therefore ensuring the tracking
of (1 by 2).
Finally, the control action of the recurrent neural networks is given by:
uin=fixi+λnixi-Wniσxit-τ+
121+Lϕσi2Win2ei+
(22)
Kpet+KiaDt-λet+KdaDtαet-
∑j=1j≠iNcijaijΓej,
i=1,2,…,N.
5 Simulations
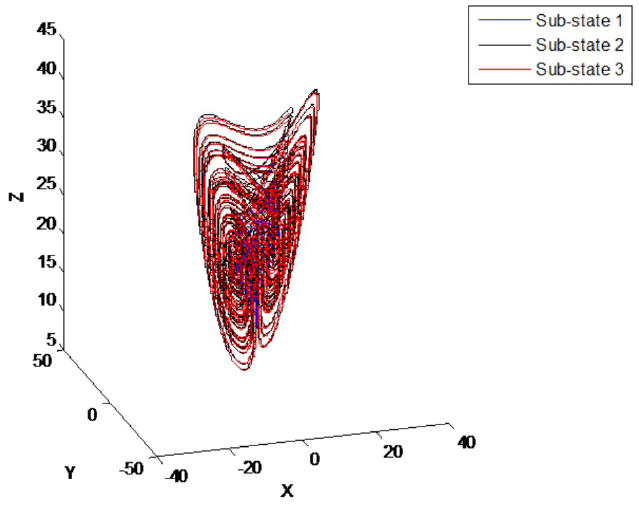
In order to illustrate the applicability of the discussed results, we consider a
fractional order dynamical network with just one fractional order Lorenz's node and
three identical fractional order Chen's nodes. The single fractional order Lorenz
system is described by:
aDtαxp1=10x2-10x1,
aDtαxp2=-x2-x1x2+28x1,
(23)
aDtαxp3=x1x2-83x3,
xi0=10,0,10T, i=1,
and the Chen's oscillator is described by:
aDtαxi1=p1xi2-xi1+∑j=1,j≠i4cijaijxj1-xi1,
aDtαxi2=p3-p2xi1-xi1xi3+p3xi2+
∑j=1,j≠i4cijaijxj2-xi2,
(24)
aDtαxi13=xi1xi2-p2xi3+∑j=1,j≠i4cijaijxj3-xi3,
xi0=-10,0,37T,i=2,3,4.
If the system parameters are selected as p1 = 35,
p2 = 3, p3 = 28, then
the fractional order Lorenz's system and the fractional order Chen's system are
shown in Fig. 1 and Fig.2, with α = λ = 1, Fig.
3 and Fig.4, with α = λ = 0.0005
respectively. In this set of system parameters, one unstable equilibrium point of
the oscillator (25) is x = (7:9373; 7:9373; 21)T [12].
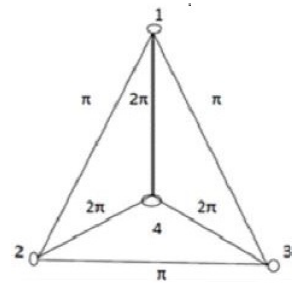
Suppose that each pair of two connected fractional order Lorenz and the fractional
order Chen's oscillators are linked together through their identical sub-state
variables, i.e.,Γ = diag(1,1,1), and the coupling strengths are
c12 = c21 = π,
c23 = c32 = π,
c13 = c31 = π,
c14 = c41 = 2π,
c24 = c42 = 2π,
c34 = c43 = 2π. Fig. 5 visualizes this entire fractional order
dynamical network.
The neural network was selected as:
Ani=-1000-1000-1,
Wni=120-340023,
σxni=tanhn1xt-τtanhn2xt-τtanhn3xt-τ,
xni=20,20,-10T,
Lϕσi≜ni=3,i=1,2,3,4.
(25)
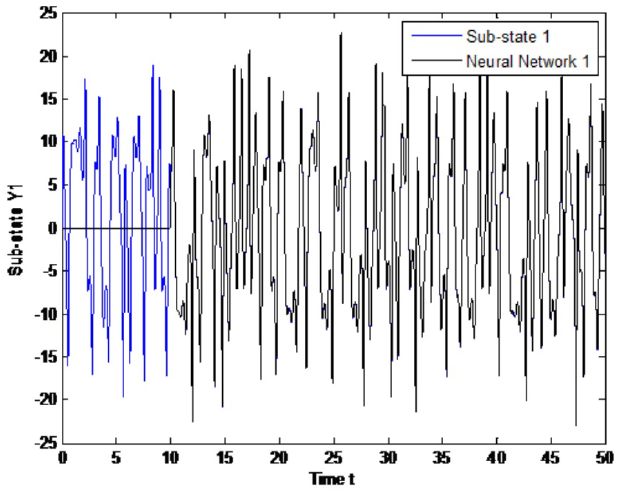
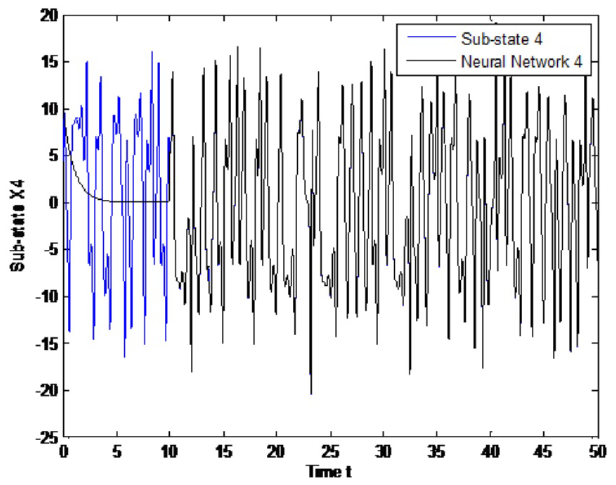
The experiment is performed as follows. Both systems, the recurrent neural network
(2) and the dynamical networks (24) and (25), evolve independently; at that time
t = 10 Seconds, the proposed control law (22)
is incepted. Simulation results are presented in Figs.
6-8, with α = λ = 1, , for sub-sates
of node 1. As can be seen, tracking is successfully achieved and error is
asymptotically stable, as it is shown in Figs.
9-11, with α = λ = 0.0005 for
sub-states of node.
6 Conclusions
We have presented a controller design for trajectory tracking of a fractional general
complex dynamical networks. This framework is based on controlling dynamic neural
networks using Lyapunov-Krasovskiitheory in the fractional case. We obtained a
control law in a purely theoretical way, and can be therefore to a wide range of
problems in trajectory tracking.
The proposed control law guarantees the stability of the tracking error between plant
and reference signals. The analytical results obtained that predict the stability of
the tracking error between plant and reference signals are satisfactory, which can
be seen through simulation, these clearly show the desired tracking.
As an example, the proposed control is applied to a simple network with four
different nodes and five non-uniform links. In future work, we will consider the
stochastic case in fractional systems.
Acknowledgement
The authors thanks the support of CONACYT and the Universidad Autónoma de Nuevo León
and the Dynamical Systems Group of the Facultad de Ciencias Físico-Matemáticas-UANL,
México.
References
1. Rojas-Moreno, V. & Sandoval, J. (2000).
Fractional order PD and PID position control of an angular
manipulator of 3DOF.
[ Links ]
2. Wang, X. (2002). Complex networks: Topology,
dynamics and synchronization. Int. J. Bifurcation Chaos, Vol.
12, No. 5, pp. 885-916.
[ Links ]
3. Wu, C.W. (2002). Synchronization in coupled
chaotic circuits and systems. World Scientific Series on Nonlinear
Science Series A: Volume 41, pp. 188.
[ Links ]
4. Newman, M. (2003). The structure and function of
complex networks. SIAM, Vol. 45, pp. 167-256.
[ Links ]
5. Li, X., Wang, X. F., & Chen, G. (2004). Pinning
a complex dynamical network to its equilibrium. IEEE Transactions on
Circuits and Systems I: Regular Papers, Vol. 51, No. 10, pp.
2074-2087.
[ Links ]
6. Liping, C., Yi, C., Ranchao, W., Jian, S., & Ma, T.
(2012). Cluster synchronization in fractional-order complex dynamical
networks. Physics Letters, Vol. 376, No. 35.
[ Links ]
7. Baleanu, D., Ranjbar, A., Sadati, S.J., Delavari, H.,
Abdeljawad, T., & Gejji, V. (2011). Lyapunov-Krasovskii stability
theorem for fractional systems with delay. Rom. Journ. Phys.,
Vol. 56, No. 5-6, pp. 636-643.
[ Links ]
8. Aguila, N., Duarte, M., & Gallegos, J. (2014).
Lyapunov functions for fractional order systems. Communications in
Nonlinear Science and Numerical Simulation, Vol. 19, No.
9.
[ Links ]
9. Contharteze-Grigoletto, E. & Capelas de-Oliveira, E.
(2013). Fractional versions of the fundamental theorem of calculus.
Applied Mathematics. Scientific Research, Vol. 4, pp.
23-33. DOI: 10.4236/am.2013.47A006.
[ Links ]
10. Sanchez, E. & Perez, J.P. (1999).
Input-to-state stability analysis for dynamic neural networks.
IEEE Trans. on Circuits Syst. I, Vol. 46, pp.
1395-1398.
[ Links ]
11. Sanchez, E., Perez, J.P., & Perez, J. (2006).
Trajectory tracking for delayed Recurrent Neural Networks.
American Control Conference.
[ Links ]
12. Li, X., Wang, X., & Chen, G. (2004). Pinning a complex
dynamical network to its equilibrium. IEEE Transactions on Circuits and
Systems I: Regular Papers , Vol. 51, No. 10, pp.
2074-2087.
[ Links ]












 text new page (beta)
text new page (beta) English (pdf)
English (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink