











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink1. Introducción
El diseño de soluciones novedosas tendentes a atenuar disfunciones del cuerpo humano ha sido posible gracias a los avances de la ciencia, la tecnología y el modelado de diferentes subsistemas de los humanos.
Estos avances han permitido afrontar de manera audaz la aplicación de soluciones tecnológicas con enfoques de sistemas bioinspirados que escalen los éxitos ya consolidados obtenidos en los marcapasos e implantes cloqueares, donde las disfunciones son superadas con la inclusión de dispositivos de hardware con comportamiento configurable.
En todos los casos se intenta monitorear, simular o corregir las disfunciones detectadas en determinadas locaciones del organismo humano [1-3, 4, 5].
La incontinencia urinaria es un problema muy común y de alto impacto en personas de cualquier edad, en especial, la población geriátrica, la infantil y en parapléjicos [6]. Como causas fundamentales de este padecimiento se reconocen las lesiones medulares, la enfermedad de Parkinson, los accidentes cerebro-vasculares y las esclerosis múltiples, entre otras [6, 7].
Las fallas en el tracto urinario inferior (LUT) sistema encargado de almacenar, contener y expulsar la orina, provocan la incontinencia.
Se reportan estudios para el modelado y simulación del funcionamiento del regulador neuronal del tracto urinario inferior por intermedio sistemas multiagentes del tipo PDE (Perception-Deliberation-Execution) [8-11]. Las pruebas realizadas a este modelo con valores correspondientes a situaciones de disfunción han demostrado comportamientos similares al sistema biológico que representa [12], y se utilizaron en [13] para el control de una plataforma robótica.
Un diseño en hardware de uno de los centros que integra el modelo del neurorregulador del LUT fue propuesto en [14]. En ese caso, se implementó el centro neuronal córtico-diencefálico, se simuló en software y se sintetizó en hardware reconfigurable (FPGA) a fin de validar su funcionamiento, y satisfacer la intención de estudiar y proponer arquitecturas de hardware que satisfagan atributos de robustez, alta velocidad de respuesta y bajo consumo de potencia con posibilidades reales de ser implantadas en humanos.
La lógica seguida en este artículo dirige la búsqueda de un dispositivo de hardware con estas propiedades a partir de un modelo teórico-matemático, una validación preliminar en software y un proceso de escalamiento hacia dispositivos de hardware reconfigurable (FPGA) afín a la reiteración de experimentos con diferentes arquitecturas candidatas en hardware.
Se trata entonces de la concepción de una plataforma híbrida que facilite la experimentación sobre variantes de arquitectura de los centros neurorreguladores del LUT en hardware y evaluar diseños y prototipos candidatos a partir de un simulador del LUT disponible en software. Este simulador exhibe determinadas funcionalidades de configuración, gráficas y operativas y muestra, además, capacidades para el intercambio de información con el hardware.
Sobre esta plataforma híbrida se puede escalar progresivamente el paso de los diferentes centros simulados previamente en software, migrados a hardware reconfigurable al tiempo que se monitorea el comportamiento adecuado del sistema en su conjunto, con componentes que radican en software o hardware, desde el simulador con un estilo que muestra similitudes con la realización de pruebas unitarias [15].
Para ello se presentan brevemente los antecedentes del trabajo, el modelo formal, las herramientas de software y la integración que ha sido realizada para lograr así una plataforma híbrida que facilita la experimentación y la validación integral del modelo, sus diseños e implementaciones.
2. Antecedentes
El modelo utilizado en este trabajo concreta un grupo de investigaciones sobre el sistema neurorregulador humano y se centra en la teoría de agentes como estrategia de representar el comportamiento distribuido de éste. El modelo en cuestión se enfoca en describir el comportamiento de los centros de control de los nervios relacionados con el LUT y de las conexiones neuronales que se manifiestan entre ellos [10].
Ubicados a lo largo de la médula espinal, los centros neuronales que componen al LUT se definen como grupos de neuronas que realizan de manera cooperativa determinada función [8]. Los centros reciben señales procedentes del sistema mecánico o de otros centros, ejecutan determinado procesamiento y generan determinadas respuestas. Las señales que llegan al sistema mecánico o que parten de él se modelan como un conjunto de señales neuronales aferentes y eferentes1.
Se precisa de ciertas vías neuronales que transportan la información generada por el sistema mecánico hacia los centros de control para su procesamiento y transmisión hacia diversas áreas del sistema mecánico [8] para provocar los efectos de expulsar o contener la orina, entre otros posibles.
La ubicación de los centros de control que componen el LUT en el coxis y a lo largo de la columna vertebral, las vías neuronales que conectan a éstos con los órganos y con otros centros con los que se relacionan [16] se observan en la figura 1(a). La figura 1(b) representa un modelo conceptual donde se muestran los centros integrantes del LUT, las conexiones entre ellos y las señales responsabilizadas con el proceso de regulación [10].

Se reconocen tres tipos de señales en el sistema LUT. Aquellas que proceden del sistema mecánico consideradas de tipo aferentes (A), internas (I) las que son generadas por las áreas facilitadoras de la retención y la micción y las internas al sistema en sí mismo porque transmiten impulsos entre un centro y otro y las eferentes (E) que se dirigen directamente a la musculatura del sistema mecánico. Se utilizará el formalismo de denominar las señales según su tipo utilizando los caracteres alfabéticos A, E, I, a los que se les precede de un superíndice que indica el origen de la señal y se les coloca un sufijo en formato de subíndice para indicar el destino. Así la simbología CDIPA representa una señal interna que va desde el centro córtico-diencefálico (CD) hasta el centro del área preóptica (PA).
El centro neuronal córtico-diencefálico se responsabiliza con las áreas facilitadoras e inhibidoras de la micción, exhibe el más alto nivel de abstracción en cuanto a esencialidad [10] y es una componente medular en esta propuesta.
Adicionalmente, el centro CD tiene cierta relevancia en el funcionamiento del sistema dado que monitoriza las áreas voluntarias de la retención y la micción, así como el inicio involuntario de la micción a fin de tomar medidas dependientes de la tensión del detrusor (DACD) de la señal interna facilitadora de la micción (MICD) y de la señal interna activadora de la retención (RICD).
En función de los valores de las señales de entrada, el centro córtico-diencefálico activará la señal de salida CDIPA que es la señal interna que va desde el centro CD hacia el centro PA o la señal CDIPS que es la señal que va desde el centro CD al centro de almacenamiento pontino (PS).
En la figura 1(b) se observan las entradas y salidas asociadas al centro córtico-diencefálico, las que no modifican el estado del sistema, pero actúan sobre otros centros (PA y PS) con las señales nerviosas CDIPA y CDIPS.
3. Simulador del tracto urinario inferior (LUT)
Un simulador es “una imitación del funcionamiento de un proceso o sistema del mundo real a lo largo del tiempo” [17]. El simulador del LUT empleado en este trabajo se concibe como una herramienta de prueba en software cuya funcionalidad principal consiste en simular el sistema neurorregulador de manera parcial o totalmente. Para las pruebas realizadas se toman datos reales procedentes de estudios médicos [10].
El simulador presentado en [12] valida el comportamiento del modelo del LUT pero no contempla la integración de centros neuronales procedentes de otras arquitecturas. Por ello, fue necesario introducir un principio simple que permita el intercambio de un simulador en software con prototipos de centros neuronales implementados en hardware.
Dado que un centro neuronal puede concebirse como un agente que percibe la situación de las variables del ambiente, emplea esta información y exhibe capacidad para memorizar determinados estados internos previos a fin de deliberar y ejecutar determinadas decisiones, se realizó un paso previo en esta investigación en la que se modeló cada centro neuronal por intermedio de un agente. El diseño de cada centro fue orientado de forma tal que cada uno de ellos se constituye en una componente de software operado por mensajes, siguiendo una estrategia de desarrollo del tipo MDC (Message-Driven Software Component) [18].
Lo anterior implica que cada componente del tipo MDC consume mensajes de manera asíncrona. Por ello, existe una componente que agrupa los mensajes y emite una notificación a aquellos centros que tienen señales por procesar. En la figura 2 se muestran estos componentes y sus relaciones.
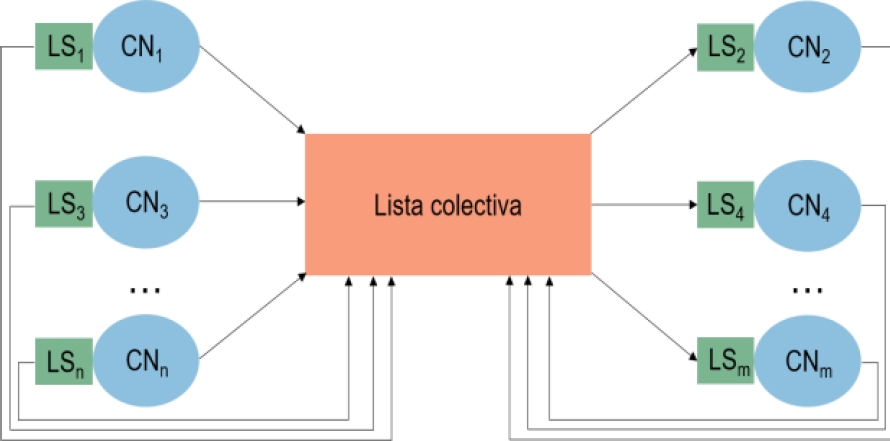
Cada componente puede ser generalizada con la simbología LSi, representativa de las señales correspondientes al i-esímo centro. La componente Lista colectiva es la encargada de decidir que señal llega a cada LSi.
En términos de interfaz con el usuario, el simulador desarrollado exhibe tres niveles de interacción: Simulación, Análisis y Configuración.
A través de Configuración el usuario puede definir los valores de las señales aferentes que proceden del sistema mecánico, configurar los centros neuronales y asistirse de su localización anatómica.
A través de un diseño amigable, la sección Simulación permite la modelación bidimensional gráfica de los centros neuronales y las señales neuronales que se encuentran activas proporcionando información al usuario. Además, se muestran los valores de todas las señales en tiempo de ejecución. En la figura 3 se puede observar una vista de la interfaz principal del simulador.
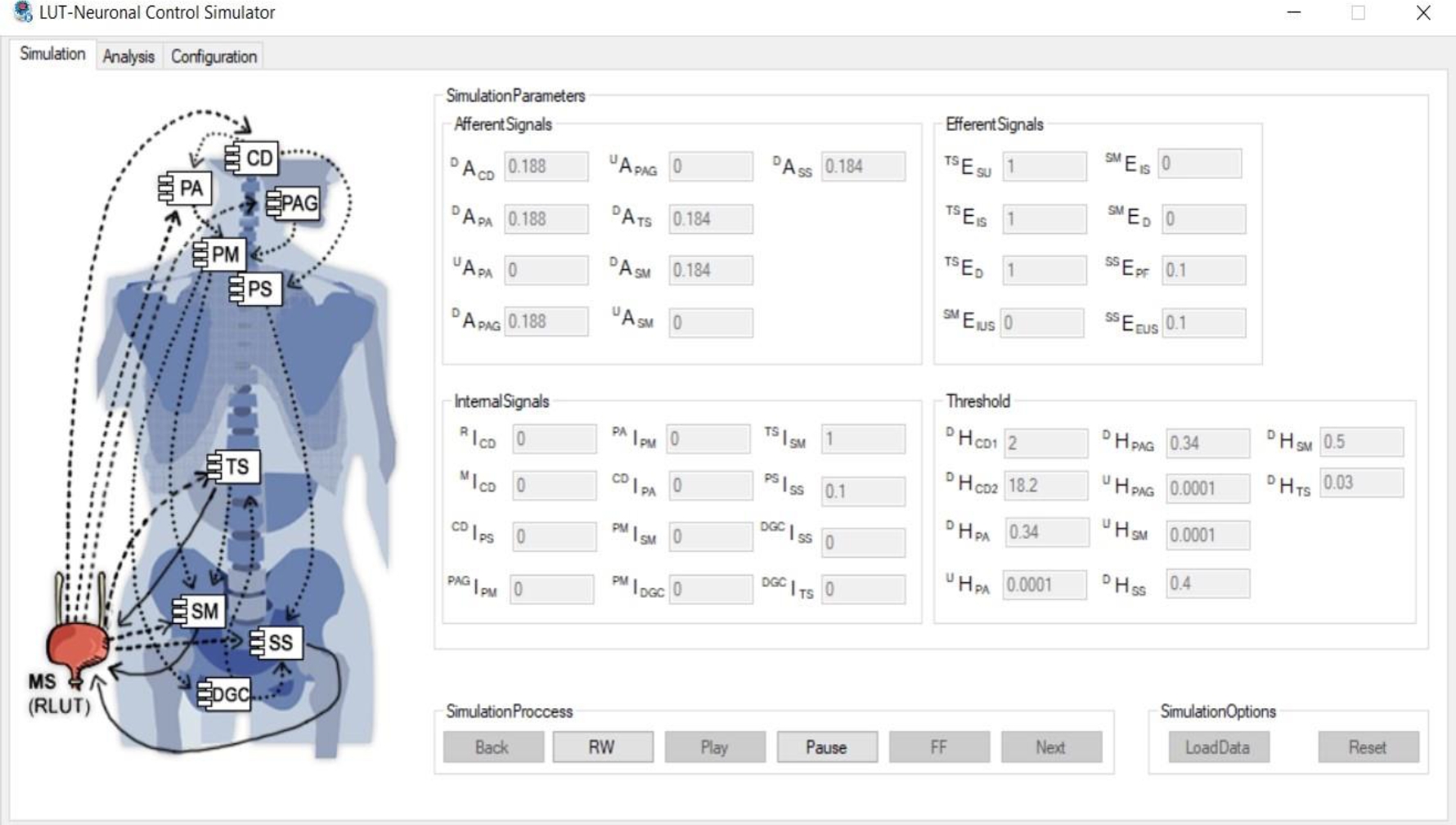
De forma natural, los valores de las señales aferentes deben ser cargados en la sección de configuración previamente explicada, pero también pueden ser alterados al pausar la simulación con el objeto de afectar de manera consciente el resultado del proceso.
De esta forma, se puede estudiar de manera interactiva el comportamiento aislado de los centros neuronales o del sistema en su conjunto. Ello incluye la desactivación de algún centro neuronal o el ingreso de valores diferentes en las entradas correspondientes. El control del proceso de simulación se logra gracias a la presencia de las siguientes opciones:
- Play: Comenzar la simulación.
- Pause: Pausar la simulación.
- Back: Ejecutar la simulación un paso hacia detrás.
- RW: Reducir la velocidad de la simulación.
- FF: Aumentar la velocidad de simulación.
- Next: Ejecutar la simulación un paso hacia adelante.
La funcionalidad del simulador se completa con la posibilidad de graficar las señales a fin de mejorar la comprensión de los procesos que tienen lugar en el regulador neuronal del tracto urinario inferior (LUT). La interacción entre centros y el comportamiento de las señales se presenta en tiempo real.
La sección Análisis permite el acceso en tiempo de ejecución al proceso de simulación con el fin de observar por intermedio de gráficas las relaciones existentes entre las diferentes señales.4 Diseño del centro córtico diencefálico en hardware reconfigurable.
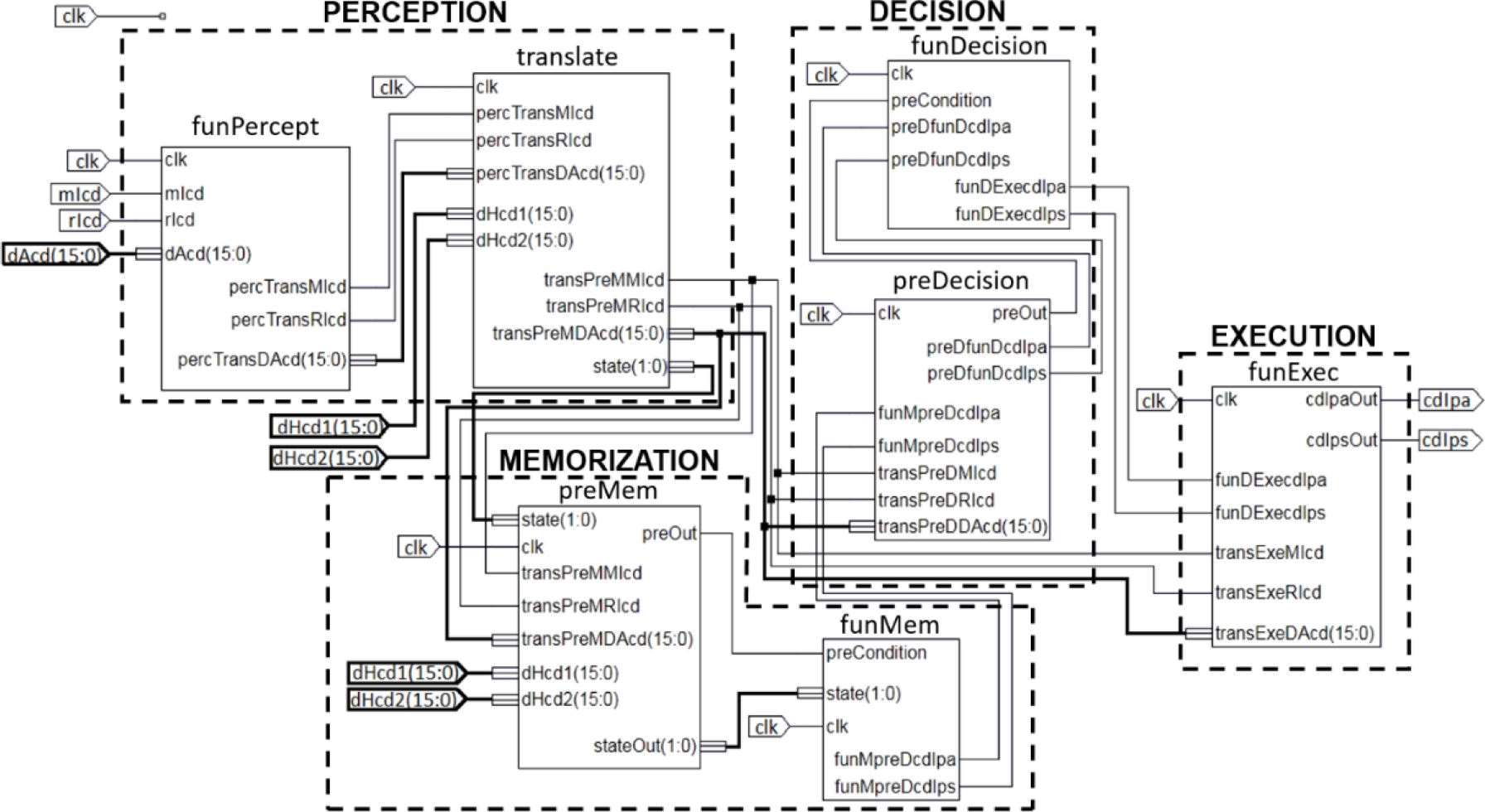
En la propuesta se contó con un diseño del centro córtico-diencefálico validado sobre hardware reconfigurable utilizando la placa ZYBO Zynq 7000 [14] el que está compuesto por los módulos de percepción, memorización, decisión y ejecución según el modelo propuesto en [10] para los centros neurorreguladores.
El módulo de percepción se implementa por medio de las funciones: funPercept que se encarga de seleccionar las señales de entras y translate que interpreta éstas y determina el estado del sistema. La memorización se garantiza a través de dos funciones: preMem que calcula una precondición que indica si se requiere actualizar o no la memoria interna del sistema; mientras que funMem cambia el estado de la memoria interna en función de preMem.
A su vez, el bloque decisión se estructura en base a dos funciones: la función preDecision que determina si se ha de tomar o no la decisión que se determine; y funDecision que se encarga de tomar la decisión en función de la entrada. Finalmente, el módulo de ejecución se encarga de enviar como respuesta las señales internas CDIPA, CDIPS a otros centros del sistema por intermedio de la función funExec. En la figura 4 se muestra la estructura interna de la propuesta que se usó para la integración.
5. Propuesta
A partir del simulador en software que implementa el modelo teórico-matemático del LUT se requiere incorporar funcionalidades que permitan el intercambio bidireccional de señales entre el propio simulador y las componentes radicadas en la plataforma de hardware reconfigurable (FPGA).
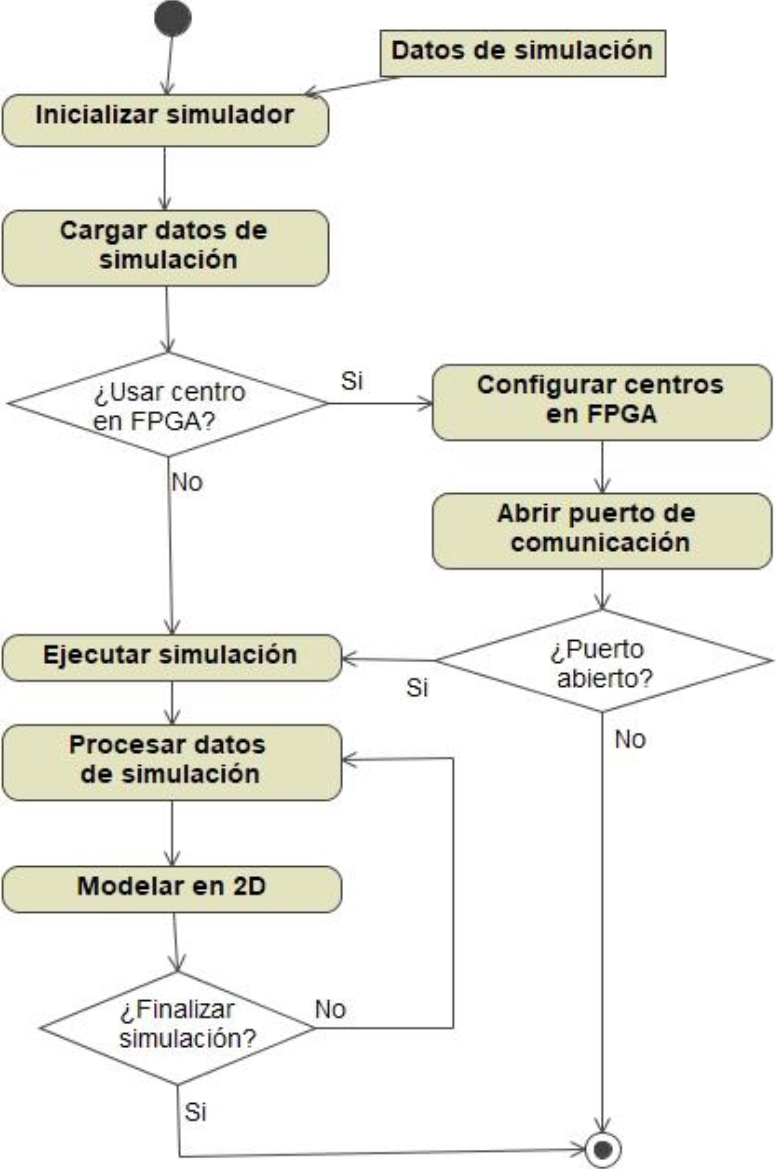
El diagrama de actividades de la figura 5 concibe la interacción eventual de un simulador en software con componentes radicadas en hardware a través de una interfaz de comunicaciones. El conjunto puede ser interpretado como una plataforma híbrida que combina componentes en software con componentes en hardware para realizar procesos de simulación y experimentación.
La necesaria integración por la vía de un canal de comunicaciones se logra a través de un módulo IP (Intellectual Property) que implementa las funcionalidades para la comunicación con un procesador del tipo ARM incluido en el FPGA por medio del almacenamiento de datos en registros del procesador. Los datos son enviados desde el hardware a través del puerto de comunicaciones UART (Universal Asynchronous
Receiver-Transmitter) presente en la placa. En la figura 6 se puede observar un diagrama de despliegue donde se representa el nodo que alberga y ejecuta la componente en software del simulador, los nodos radicados en hardware y los aspectos esenciales de comunicación entre las partes.

El envío de los datos se inicia en el simulador y se dirige a los centros neuronales implementados en hardware reconfigurable.
Las señales de entrada a estos centros son enviadas por la UART de la placa y son empaquetadas y enviadas hacia la lógica programable a través de una especificación del bus AMBA (Advanced Microcontroller Bus Architecture) [19], el Axi4 Lite (Advanced Extensible Interface).
Cuando el centro neurorregulador recibe la señal enviada por el simulador en software, realiza las acciones de deliberación correspondientes a un agente PDE y emite su respuesta, la que es retornada hacia el procesador de la placa a través del propio bus de datos a fin de ser devuelto hacia el simulador. Es importante destacar que, para lograr la sincronización entre el envío y recepción de datos entre el dispositivo y el simulador, este último entra en un estado de espera de los datos deliberados en el centro neurorregulador del FPGA antes de continuar hacia una próxima iteración en el proceso de simulación.
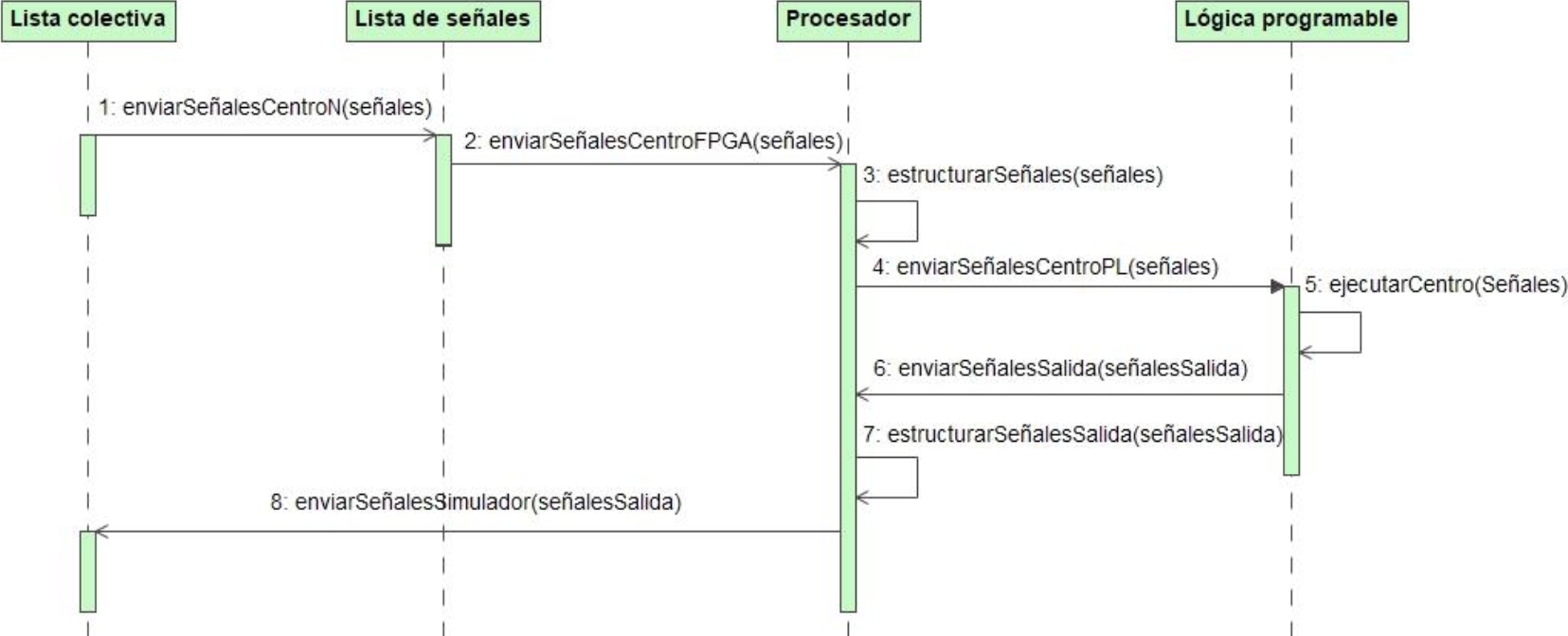
La figura 7 muestra una vista dinámica del sistema en su conjunto a través de un diagrama de secuencia
6. Validación de la propuesta
El trabajo desarrollado demostró su utilidad para la experimentación y el diseño de soluciones escalables que combinen simulación en software con componentes en hardware reconfigurable explotando las posibilidades de someter a estudio un sistema complejo por medio de la simulación.
La plataforma de experimentación aplicada para combinar en un ambiente híbrido un simulador en software y un centro neurorregulador ha sido validada adecuadamente a través del simulador del LUT y el centro córtico-diencefálico.
La plataforma desarrollada permite una fácil integración con otros centros neuronales sobre hardware reconfigurable (FPGA) mediante un proceso de configuración simple que especifique donde se radica el centro, si en hardware o en software. El módulo IP elaborado exhibe suficiente generalidad como para permitir el acoplamiento de un espectro variado de diseños de centros neuronales.
Al realizar las pruebas de integración del centro CD en hardware con el simulador en software se pudo constatar que se satisfizo el comportamiento esperado del conjunto software-hardware según el análisis de las señales correspondientes.
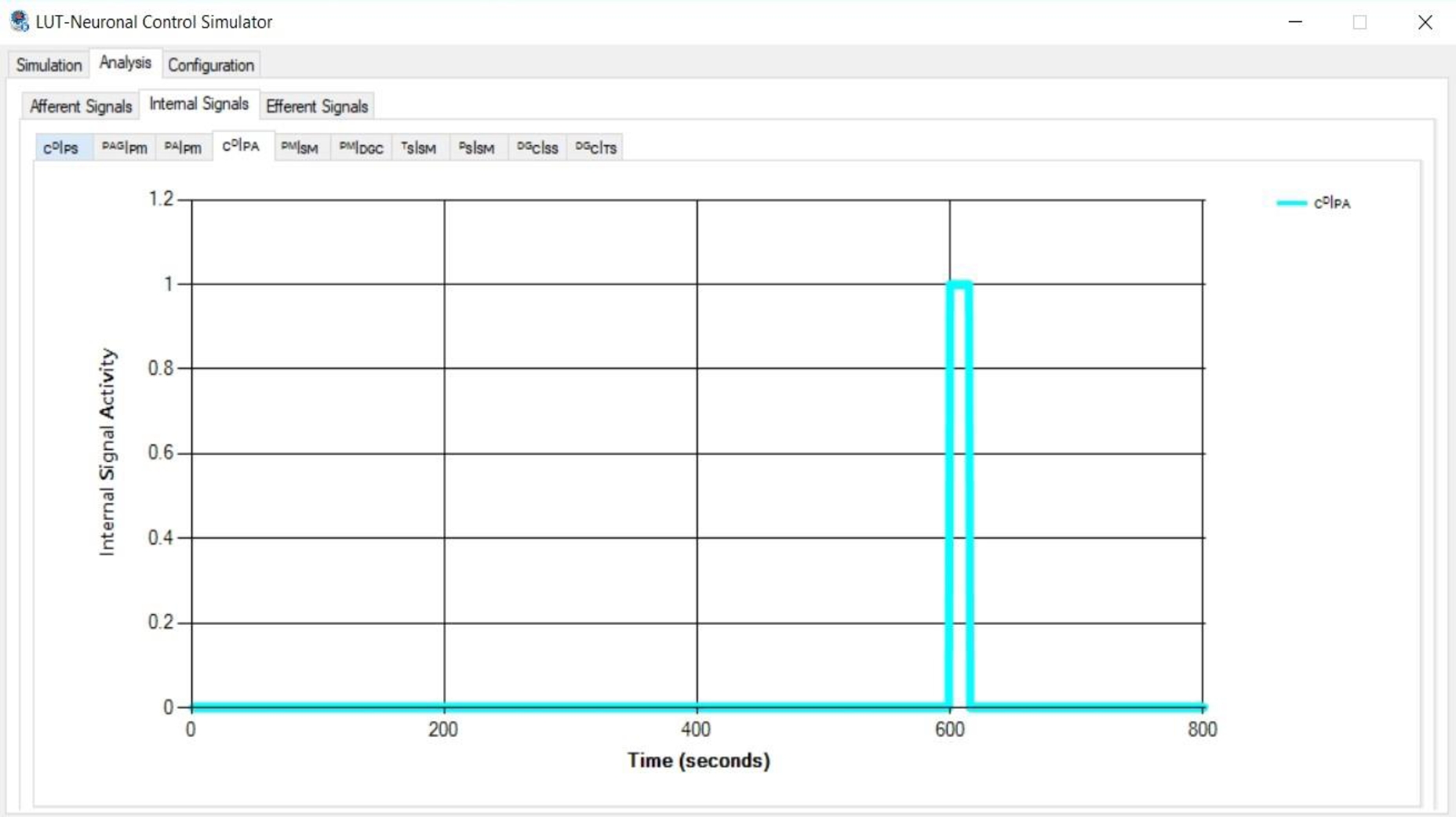
Las figuras 8 y 9 muestran la evolución de las señales CDIPS y CDIPA, lo que demuestra que cuando el hardware es utilizado con el resto de elementos del sistema, el comportamiento del conjunto también se corresponde con el esperado y por tanto con el comportamiento del centro biológico córtico-diencefálico. Estos resultados aportan validez preliminar a la plataforma de experimentación.

7. Conclusiones
Los resultados alcanzados en los últimos años tanto en el contexto del modelado y simulación como en el de sintetizar elementos particulares de dicho modelo sobre hardware, han sido satisfactorios. En este momento se ha llegado a un punto donde ambos enfoques deben converger para así poder validar que el hardware cumple con los requerimientos impuestos por el sistema biológico y que a su vez continúa siendo válido según sus propias restricciones.
Del trabajo desarrollado se pueden derivar las siguientes conclusiones:
Se realizó el diseño y una implementación de una plataforma que logra integrar el simulador desarrollado para el tracto urinario inferior con un hardware reconfigurable.
Se logró demostrar la correcta validación de la integración del centro CD en hardware reconfigurable con el simulador del neurorregulador del LUT.
La plataforma diseñada permite de manera simple el escalamiento de otros prototipos de hardware.
La integración del simulador con el hardware reconfigurable a través de una interfaz de comunicación estándar hace presumir que el resultado alcanzado es de suficiente generalidad para su aplicación en este tipo de investigaciones, donde es práctica común el tránsito desde un modelado teórico-matemático hacia prototipos en software a fin de obtener diseños definitivos en hardware.

