











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
Un pico-satélite es un tipo de satélite destinado a la exploración y la investigación. Debido a tales dimensiones y limitaciones de masa, sus componentes y subsistemas deben ser más pequeños en comparación con los satélites convencionales. Actualmente los satélites educativos tienen un papel importante para el desarrollo de tecnología en las agencias espaciales, industria e instituciones educativas [1]. El tamaño permite que se construyan rápidamente mientras que el peso determina el bajo costo para el lanzamiento. Desde hace una década se establecieron programas en diferentes países para desarrollar simuladores de satélites, logrando difundir información de satélites en universidades en vías de desarrollo [2, 3]. Los pico-satélites CanSat por sus siglas en ingles Can-Satellite fueron nombrados por el profesor Robert Twiggs del laboratorio de la Universidad de Stanford en 1999, cuya finalidad es transmitir a los estudiantes los conocimientos para el diseño y construcción de satélites [4]. La categoría de los pico-satélites se encuentra dentro del intervalo de 0.1 a 1 kg de masa por debajo de los CubeSats [5], los CanSat tienen las dimensiones que corresponden a una lata de refresco de 65 mm de diámetro y 122 mm de altura [6].
Los CanSat no son puestos en órbita, pero son lanzados desde una altura aproximada de un kilómetro desde el suelo [7].
La misión que se asigna al CanSat se desarrolla de manera autónoma en el descenso, en paracaídas o estructura plegable, durante este recorrido se debe garantizar que exista comunicación con la estación terrena y que al momento de aterrizar no sufra ningún tipo de daño ocasionado por el impacto [8].
Los CanSat se trasladan con cohetes y drones multirotor [6], estos dispositivos transmiten fuertes vibraciones a través de las secciones de unión al satélite a bordo. Los CanSat son expulsados del sistema de transporte una vez que se alcanza la altura máxima. Durante su recorrido y lanzamiento, un pico-satélite está sujeto a varias fuerzas externas como resultado de la aceleración, ruido vibro-acústico, vibraciones del motor de propulsión del sistema, encendido y quemado de motores de propulsión, separaciones de etapas, maniobras de vehículos, expulsión [9].
Un pico-satélite debe cumplir los requisitos dados por el lanzador basado en las especificaciones del vehículo de lanzamiento [10].
Este trabajo se centra en el análisis estructural de un CanSat durante el lanzamiento, se emplean métodos computacionales para determinar la respuesta de la estructura principal bajo la condición del lanzamiento, se desarrollaron modelos con el método de elemento finito utilizando el paquete computacional ANSYS [11].
Para analizar el comportamiento de esfuerzos de Von Mises del CanSat bajo condiciones cuasi-estáticas se consideró una aceleración que varía de 0-300 Newtons en dirección vertical considerando la aceleración de 30.5 g que tendría el cohete en el lanzamiento, por otro lado, se determinaron las frecuencias naturales y formas modales con resultados satisfactorios debido a que los resultados se encuentran por debajo del límite de los materiales utilizados.
2. Análisis de lanzamiento
Colocar las fuerzas adecuadas en un CanSat durante el lanzamiento es complejo, puesto que existe una variedad de condiciones externas antes mencionada durante este procedimiento. Estas condiciones generan esfuerzos estructurales que determina la vida del CanSat desde el instante que realiza su primer lanzamiento, los esfuerzos críticos se presenta durante el lanzamiento, en este tiempo existen fuerzas que se pueden considerar como estacionarias ejemplo de ello el empuje, otras son de comportamiento transitorio al momento de apagar y encender un motor del cohete, por otro lado se encuentran las fuerzas acústicas, que son ondas con varias frecuencias que causan vibración aleatoria en la estructura [12], el choque pirotécnico provocado por la explosión comúnmente utilizado para separar etapas del cohete produce vibración de alta frecuencia con valores mayores a 1000 Hz [13].
Las condiciones para el análisis del CanSat se realizan bajo fuerzas estáticas con valores que van desde 1 N a 300 N en dirección vertical negativas, correspondientes a aproximadamente 30.5 veces el valor de la gravedad, esta fuerza se aplicó en el borde superior de la lata de refresco. También se estudió el comportamiento de la estructura del CanSat, bajo el efecto de la fuerza de 30 veces el valor de gravedad. Por otro lado, se considera que el método de lanzamiento se realiza mediante un dron hexacoptero, con motores que trabajan a 28800 revoluciones por minuto, mismos que producen una frecuencia de excitación de 480 Hz, bajo este contexto se determinan los valores de la frecuencia natural dentro de un rango de 70 a 800 Hz, para la estructura del satélite educativo.
3. Teoría analítica del análisis modal
El análisis de forma modal es una técnica usada para determinar las características de vibración mecánica en las estructuras. Existe una clasificación de tres categorías principales para realizar el análisis de vibración de componentes [14]:
a. La vibración libre se presenta cuando no existe una fuerza de excitación externa al sistema por un largo tiempo.
La respuesta del sistema es el resultado las condiciones iniciales para el desplazamiento, medido desde la posición de equilibrio estático. La vibración libre produce movimientos en una o más direcciones que corresponden al comportamiento de las frecuencias naturales, las estructuras físicas presentan este movimiento que desaparece en corto tiempo o es absorbida por el factor del amortiguamiento del material. La respuesta del sistema es analizada típicamente en el dominio del tiempo.
b. La vibración forzada tiene lugar cuando una excitación periódica externa agrega energía de forma continua a una estructura mecánica, la respuesta del sistema se analiza típicamente en el dominio de la frecuencia, esto permite identificar las causas de los desplazamientos en diferentes frecuencias naturales, las condiciones críticas de desplazamiento del sistema se presentan cuando la frecuencia de excitación y la del sistema se igualan o están próximas entre ellas.
c. La vibración auto-excitada, es un comportamiento que se presenta cuando una fuerza de excitación es modulada en una de las frecuencias naturales del sistema y se analiza el comportamiento del desplazamiento o respuesta del sistema.
El software de simulación numérica ANSYS Workbench, permite calcular y analizar sistemas estructurales bajo condiciones de vibraciones, frecuencias naturales y formas modales [15]. La ecuación para analizar el comportamiento dinámico de un sistema lineal no amortiguado, con rigidez y masa constante permite determinar las frecuencias naturales y formas modales [16], la expresión analítica se presenta a continuación y la representación gráfica del sistema masa con rigidez y amortiguamiento se muestra en la figura 1:
donde M es la matriz de masa, C es la matriz de amortiguamiento y K es la matriz de rigidez,

Para generar las matrices globales de masa, rigidez y vector de fuerzas es necesario realizar el ensamble de las matrices locales de cada elemento, como se expresa a continuación:
Para resolver el sistema y determinar las frecuencias naturales es necesario resolver la ecuación 1, considerando que el valor de la matriz de
Considerando que el movimiento es armónico, se tiene la siguiente relación para el desplazamiento, velocidad y aceleración:
donde:
Sustituyendo las consideraciones de la expresión 3 en la ecuación (2), y teniendo en cuenta que el ángulo de fase
La ecuación (4), se satisface si
La ecuación (5), representa un sistema con n soluciones, eigenvalores
La mayoría de los softwares de simulaciones numéricas permiten controlar la configuración del solucionador o bien realizarlo de manera automática.
4. Modelo y análisis
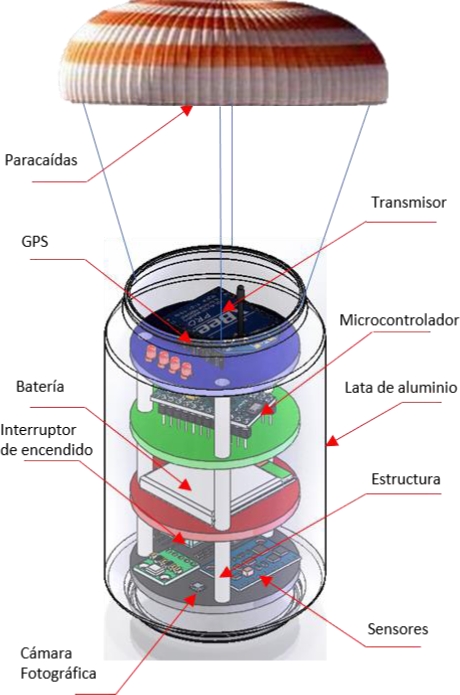
La estructura del CanSat que se utiliza para el análisis de esfuerzos en este documento es el desarrollado por la Universidad Autónoma de Baja California [6]. La figura 2, muestra la estructura del satélite incluyendo las bases circulares en posición horizontal para colocar los dispositivos electrónicos. La estructura se modelo utilizando el software de diseño asistido por computadora Solid Works y posteriormente se importó la geometría en el paquete computacional de elemento finito denominado ANSYS. Los componentes más importantes que integran el satélite se pueden apreciar en la figura 2, los cuales se enlistan a continuación.
Paracaídas,
GPS,
Transmisor,
Batería,
Cámara fotográfica,
Interruptor de encendido,
Estructura,
Lata de aluminio,
Sensores,
Microcontrolador.
Básicamente la estructura del satélite se encuentra contenida en una lata de refresco de 65 mm de diámetro por 122 mm de altura es cual es fabricado de aluminio 6061. La aleación de aluminio endurecido 6061 es utilizado para la fabricación de latas de refresco, este material es maleable, ligero y de bajo costo. Para simplificar el modelo se omiten los elementos de unión por tornillos, considerando que las piezas se encuentran conectadas sin movimiento relativo entre ellas.
El contacto superficial entre los elementos es considerado totalmente pegado. En el modelo de elementos finitos utilizado para el análisis, se tienen tres columnas de Nylamind que soportan a cuatro placas circulares de baquelita. El Nylamind tiene buenas propiedades de resistencias mecánicas, es aislante eléctrico, además de ser ligero, mientras que la baquelita tiene buena resistencia a altos voltajes, con buena resistencia eléctrica, presenta buenas propiedades de resistencia mecánica y bajo peso.
Los tres soportes de Nylamind se fijan a la parte inferior de la lata de refresco como se muestra en la figura 3.

El análisis de la estructura se lleva a cabo utilizando el software ANSYS [17]. El espesor de la lata de refresco es de 0.15 mm en las superficies [18], el material utilizado para la simulación tiene una densidad de 2,700 kg/m3, un módulo elástico de 68.9x109 Pa y un coeficiente de Poisson de 0.33 [19].
Las dimensiones de las placas horizontales que sirven de soporte para componentes electrónicos se modelaron con un espesor de 1.3 mm y un diámetro de 65.75 mm. EL material utilizado en la simulación para las placas es Baquelita con una densidad de 1.4 g/cm3, un módulo elástico de 1.2x108 Pa, y una relación de Poisson de 0.3 [19]. Las tres columnas presentes en el modelo y las bases de los componentes electrónicos sobre las placas son consideradas con un material de Nylamind con una densidad de 950 kg/m3, un módulo elástico de 1.1x109 Pa y una relación de Poisson de 0.42 [19].
Las propiedades de los materiales utilizados para la simulación estático estructural, y análisis modal corresponden a las características mecánicas de los componentes del CanSat [3].
Para el análisis de CanSat con el método de elemento finito FEM, se eligen elementos tetraédricos para los componentes con geometrías complejas. Para elementos geométricamente sencillos se utilizan elementos hexaédricos [13]. En el análisis de la estructura se estudió la convergencia de resultados para los desplazamientos máximos con diferentes densidades de malla y para una carga de -300 N como se muestran en la figura 4 y tabla 1.

Tabla 1 Convergencia de resultados de desplazamiento
| Tamaño de elementos | Número total de elementos | Desplazamiento Máximo |
|---|---|---|
| 3 mm | 60662 | -0.0781 mm |
| 2 mm | 74747 | -0.0927 mm |
| 1 mm | 174736 | -0.0940 mm |
| 0.85 mm | 307826 | -0.1151 mm |
| 0.75 mm | 375980 | -0.1157 mm |
En este estudio se realizaron análisis estáticos y modales de la estructura del satélite CanSat, el análisis estático es necesario para estimar la fuerza que soporta la estructura, los valores en las regiones de esfuerzos de tensión y la compresión.
Por otro lado, se comparó con el límite elástico del material empleados en la simulación para obtener el factor de seguridad.
Las condiciones de frontera para el análisis se consideraron con una fuerza aplicada verticalmente sobre la superficie superior de la lata de refresco, en la parte inferior se considera totalmente empotrada, la figura 5 muestra las condiciones de fuerza las cuales se variaron desde -1N hasta -300N.

Para realizar el estudio del estado de esfuerzos, deformaciones y factores de seguridad de la estructura interna del CanSat. Se consideró que el efecto de la fuerza de la gravedad actúa en todos los componentes estructurales en dirección vertical negativo (-Z), también se restringe el sistema en la parte inferior con la condición de empotramiento fijo, como se observa en la figura 6, por otro lado, la suma total de las masas del sistema modelado correspondiente a la estructura y la lata de refresco, tienen un volar de 36.07 gramos. Bajo las condiciones antes mencionadas, se realizaron simulaciones con valores de cargas desde 1 hasta 30 veces el valor de la gravedad.

Por otro lado, se obtienen los valores de las primeras 15 frecuencias naturales y formas modales de la estructura del satélite educativo con el modelo discreto con mayor densidad de malla [14].
5. Resultados y discusiones
Los resultados obtenidos del análisis numérico bajo la condición estática y dinámica mostraron que para la condición estática bajo una fuerza de -300 N que corresponde aproximadamente a el valor de 30.5 veces la gravedad, bajo esta condición la región de mayor concentración de esfuerzos se presenta únicamente en la zona superior de la geometría cilíndrica de la lata con un valor máximo de 166.26 MPa actuando a compresión, mientras que el valor máximo de desplazamiento presentado es de -0.1157 mm. Este valor del desplazamiento se presentó en la región de aplicación de la fuerza. Los resultados se presentan en la figura 7 donde se muestran los esfuerzos que la estructura puede soportar fuerzas estáticas de -300 N, bajo estas condiciones la estructura es confiable con un factor de seguridad mínimo de 1.68 en la estructura de aluminio este resultado se observa en la figura 8.


La figura 7 muestra además, que los componentes internos del satélite no presentan ningún tipo de esfuerzo y deformación a causa de la fuerza estática aplicada, sin embargo, la estructura cilíndrica de la lata de refresco es la que recibe y soporta la fuerza axial aplicada.
En la tabla 2 se muestran los valores del desplazamiento y esfuerzos máximos obtenidos para el análisis del sistema variando la fuerza de aplicación, iniciando con un valor de -1 N, hasta llegar a -300 N con un incremento de -50 N. Se observa que existe un incremento de manera lineal para los resultados del desplazamiento y esfuerzos.
Tabla 2 Resultados de desplazamiento y esfuerzo con diferentes valores de fuerzas
| Fuerza estática aplicada [N] | Desplazamiento Máximo [mm] | Esfuerzo Máximo de de compresión [MPa] |
|---|---|---|
| - 1 | -0.0031 | 6.19 |
| - 50 | -0.0156 | 30.97 |
| -100 | -0.0313 | 61.94 |
| -150 | -0.0472 | 92.91 |
| -200 | -0.0627 | 123.88 |
| -250 | -0.0784 | 154.85 |
| -300 | -0.1157 | 166.26 |
La representación gráfica de los resultados de esfuerzos, desplazamientos y factor de seguridad para el sistema CanSat ocasionadas por el efecto de la fuerza de 30 veces el valor de la gravedad se presentan en las figuras 9 y 10, en donde se puede observar que los valores máximos de desplazamiento se presentan en la parte superior de la estructura con un valor de 0.0277 mm cerca de la placa circular. La lata de aluminio en esta condición de frontera presenta valores más bajos de desplazamiento del dentro de un rango de 3X10-4 mm a 4X10-4 mm.


Las tres columnas presentan valores similares de desplazamientos, los cuales se encuentran entre 2.1145X10-3 mm en la parte inferior y 1.22X10-2 mm en la parte superior. Por otro lado, los valores máximos de esfuerzos de Von Mises se encuentran en la parte inferior localizados en las uniones de las columnas y la base de la lata de aluminio con una magnitud de 10.238 MPa, estos resultados se muestran en la figura 9.
La figura 10, muestra que la estructura interna del CanSat es capaz de soportar los esfuerzos que se producen al aplicar fuerzas del orden de 30 g en dirección vertical hacia abajo, bajo estas condiciones la estructuras presenta factores de seguridad, mínimo de 7.192, este valor se presenta en la unión de las columnas con la lata de aluminio. Los valores de desplazamientos y esfuerzos máximos para valores de 0-30 veces la gravedad se presentan en la tabla 3.
Tabla 3 Resultados de desplazamiento y esfuerzo con diferentes valores de fuerzas de gravedad
| Fuerza de gravedad [g] | Desplazamiento Máximo [mm] | Esfuerzo Máximo de compresión [MPa] |
| 1 | -0.0009 | 0.306 |
| 5 | -0.0046 | 1.533 |
| 10 | -0.0092 | 3.067 |
| 15 | -0.0138 | 4.600 |
| 20 | -0.0184 | 6.134 |
| 25 | -0.0230 | 7.660 |
| 30 | -0.0277 | 10.238 |
Los resultados de análisis de las primeras 15 frecuencias naturales se presentan en la tabla 4. El comportamiento de las diferentes formas modales de vibración de la estructura analizada nos indica que existe similitud entre algunas formas modales. En las figuras 11-16 se presentan las formas modales más relevantes.
Tabla 4 Valores de frecuencias naturales
| Modal | Frecuencia Natural Hz |
| 1 | 109.69 |
| 2 | 115.48 |
| 3 | 175.75 |
| 4 | 418.83 |
| 5 | 472.92 |
| 6 | 609.29 |
| 7 | 706.13 |
| 8 | 732.71 |
| 9 | 740.36 |
| 10 | 743.41 |
| 11 | 758.03 |
| 12 | 759.61 |
| 13 | 770.41 |
| 14 | 772.76 |
| 15 | 782.79 |






Los resultados de formas modales muestran que el primer modo se presenta a 109.69 Hz con un desplazamiento de la estructura interna en dirección del eje X, como se aprecia en la figura 11, este comportamiento es similar hasta el modo 2. La forma modal 3 presenta un desplazamiento radial con respecto al centro longitudinal de la lata, este comportamiento se observa en la figura 12.
El modo 4 presenta un desplazamiento combinado en dirección X, Y de las bases y soportes que se encuentran dentro de la lata como se muestra en la figura 13, la frecuencia a la cual se presenta este desplazamiento es de 418.83 Hz, tal como se indica en la figura 13. Por otro lado, las formas modales 5ta y 6ta, presentan un comportamiento de pandeo sobre el eje como se observa en la figura 14 y 15, las frecuencias son las más cercanas a la frecuencia de trabajo de los motores del dron hexacoptero, mientras que la figura 16 muestra un desplazamiento de la lata de aluminio a una frecuencia de 732.71 Hz.
6. Conclusión
La investigación desarrollada permitió conocer los valores de las primeras 15 frecuencias naturales del sistema CanSat, estas características dependen de la geometría y de la propiedad de rigidez y amortiguamiento del material. Por otro lado, es posible absorber la forma de vibrar de la estructura si se le colocan en la parte inferior de las columnas algunos sistemas de aislamiento para vibraciones.
El factor seguridad mínimo de 7.192 para la estructura interna del CanSat garantiza que el sistema soporta 30 veces el valor de la gravedad bajo las condiciones descritas en el apartado 4.
Se identificaron las frecuencias naturales críticas cercanas por arriba y por debajo de la frecuencia de excitación del hexacoptero correspondiente a 480 Hz durante el lanzamiento. Las frecuencias naturales 5 y 6 del satélite educativo tienen un valor de 472.92 Hz y 609.29 Hz, estas formas modales se pueden observar en las figuras 14 y 15. La separación de 7.08 Hz entre las frecuencias de excitación y la correspondiente a la 5ta frecuencia natural, garantiza que los rpm de los motores no entraran en resonancia con la estructura del satélite, teniendo un rango de separación aproximado de 424.8 rpm.
Los resultados encontrados muestran que no existe ninguna similitud en las frecuencias naturales con la frecuencia de excitación de los motores del hexacoptero, por lo que, la estructura no entrara en resonancia, por lo tanto, los componentes electrónicos no presentaran desplazamientos en las uniones de soldaduras.
Es posible disminuir el peso de la estructura completa modificando la geometría de los componentes, siempre y cuando se garantice que se tendrá la misma resistencia mecánica.

