











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1. Introducción
El arreglo de compuertas programables en campo (FPGA, por sus siglas en inglés: Field Programmable Gate Array), es un dispositivo semiconductor que contiene bloques de lógica programable cuya interconexión y funcionalidad puede ser configurada in situ mediante un lenguaje de descripción de alto nivel (HDL, por sus siglas en inglés: High Description Language), tales como, VHDL o Verilog. Un FPGA se caracteriza por ser programable o reconfigurable, y es justamente esta propiedad la que lo distingue de otros dispositivos similares, como el circuito integrado de aplicación específica (ASIC, por sus siglas en inglés: Application-Specific Integrated Circuit). En la actualidad, los FPGAs son utilizados en varios escenarios, como en robótica, comunicaciones y en equipos electrodomésticos [5, 11, 26]. Dentro de un FPGA existen varios tipos de conexiones entre ellos, los bloques lógicos configurables (CLBs, por sus siglas en inglés: Configurable Logic Blocks) y los bloques de entrada-salida (IOBs, por sus siglas en inglés: Input-Output Blocks): las conexiones directas, las conexiones de propósito general y las líneas de largo recorrido. Estas conexiones se hacen de manera aleatoria, por lo que diseñar el algoritmo de manera óptima, reduciendo los recursos según la arquitectura del dispositivo FPGA, es un problema científico que debe ser tratado.
Para crear una implementación en un FPGA, el diseñador debe especificar la HDL del circuito, para luego sintetizar en el dispositivo una descripción estructural de transferencia de registros (RTL, por sus siglas en inglés: Register-Transfer Level), que cumple ese comportamiento. Esto último se realiza con una herramienta de diseño asistido por computadora (CAD, por sus siglas en inglés: Computer-Aided Design). HDL consiste en declaraciones algorítmicas que contienen operaciones computacionales (adiciones, multiplicaciones, comparaciones y operadores lógicos) y operaciones de control (sentencias condicionales, bucles y llamadas a procedimientos) [19].
La descripción RTL mapea las operaciones en Unidades Funcionales (UFs) y distribuye las transferencias de datos en el dispositivo con una unidad de control. La unidad de control coordina el flujo de datos entre varias UFs, como lo son las unidades de hardware (ALUs, multiplicadores y compuertas lógicas), unidades de almacenamiento (registros, registros de archivos, RAM y ROM) y unidades de interconexión (multiplexores). Estos últimos están conectados entre sí para lograr un comportamiento especificado.
El proceso de transformar una descripción algorítmica en una descripción RTL se le denomina síntesis de alto nivel (HLS, por sus siglas en inglés: High-Level Synthesis). En la mayoría de los sistemas de HLS, la descripción algorítmica se representa como un grafo acíclico dirigido (DAG, por sus siglas en inglés: Directed Acyclic Graph), llamado grafo de flujo de datos (DFG, por sus siglas en inglés: Data Flow Graph) [23]. Un DFG es planificado y optimizado con los tres procesos necesarios en HLS (asignación, mapeo y planificación) [28]. Luego es necesario convertir el DFG planificado a RTL. Para finalizar, el RTL es sintetizado en el dispositivo FPGA con una herramienta de automatización de diseño electrónico (EDA, por sus siglas en inglés: Electronic Design Automation), como Xilinx ISE Design Suite [31] o Vivado Design Suite [32]. De igual manera, utilizando el DFG se hace viable un proceso de optimización de recursos, tales como: retardo, área ocupada y consumo de potencia. Este tipo de optimización para la etapa de HLS es independiente de la arquitectura del dispositivo FPGA, lo cual hace que pueda funcionar en cualquier modelo, familia o fabricante.
La principal contribución de esta investigación es la aplicación y comparación de algoritmos evolutivos multi-objetivo (MOEAs, por sus siglas en inglés: Multi-objective Evolutionary Algorithms), para la optimización simultánea de retardo, área ocupada y consumo de potencia en HLS, para dispositivos FPGAs. Particularmente utilizando el algoritmo NSGA-III, el cual, según la literatura, es un algoritmo que tiene un mejor rendimiento cuando se tienen más de 3 funciones objetivo, consideramos pertinente su utilización para la solución de este problema debido a que en un futuro pretendemos aumentar la cantidad de funciones objetivo y con ello explotar al máximo su rendimiento ya que es un algoritmo preparado para enfrentar esto. Además, no ha sido reportado en la literatura para resolver este problema, así como la comparación de los resultados con otros algoritmos como el NSGA-II y SPEA2.
El resto del artículo está organizado de la siguiente manera. En la sección 2, son descritos algunos trabajos anteriores relacionados con esta investigación. En la sección 3, se presenta la definición de DFG y el banco de pruebas Mediabench. El proceso de optimización llevado a cabo con tres MOEAs se detalla en la sección 4. En la sección 5, se presentan los resultados de los indicadores de calidad y las gráficas con las trazas de datos del proceso evolutivo. Para finalizar, se concluye el artículo y se exponen algunas notas de trabajo futuro en la sección 6.
2. Trabajos relacionados
El uso de MOEAs para mejorar el proceso de HLS ha sido comúnmente reportado en la literatura. La aplicación de un MOEA para la optimización de retardo, área, y potencia en HLS es presentado en [14]. Un resumen de metodologías basadas en MOEAs para HLS es presentado en [19]. Una demostración de que las heurísticas basadas en población de algoritmos evolutivos (EAs, por sus siglas en inglés: Evolutionary Algorithms), son muy efectivas en la exploración del espacio de diseño se expone en [19]. Los autores proponen un esquema de representación en dos componentes para la planificación de los DFGs. Una mejora al consumo de potencia de los dispositivos FPGAs basado en la unificación de rutas desde un DFG es presentado en [15]. Después de varios años de investigación por los autores, varias aplicaciones de MOEAs en HLS fueron presentadas en [2]. En una investigación previa [24], realizamos un análisis de seis MOEAs para HLS, demostrando que los algoritmos NSGA-II [9, 10] y SPEA2 [36] tienen un desempeño mejor que el resto de los MOEAs analizados.
3. Preliminares
3.1. Grafo de flujo de datos
Un DFG representa un diseño en HLS. Entendiendo como diseño al conjunto de instrucciones que secuencialmente o en paralelo, deben ejecutarse para obtener los resultados requeridos [27]. Cada nodo del grafo representa una región contigua de código sin ramas, y las aristas entre los nodos indican saltos en el flujo de los datos. La función de un nodo es generar un nuevo valor a su salida, dependiendo de sus entradas. Formalmente, un DFG está definido de la siguiente manera [17]:
donde:
3.2. Banco de pruebas Mediabench
El banco de pruebas Mediabench [21, 22], fue utilizado para realizar y validar varios experimentos para la optimización de DFGs. Elegimos este banco de pruebas dado que es un punto de referencia comúnmente utilizado en la literatura [2, 14, 15, 19, 30].
Mediabench cuenta con una base de 20 circuitos accesibles en formato *.dot con una estructura en DAG. Por lo tanto para utilizarlo, diseñamos un algoritmo implementado en lenguaje C para realizar la conversión de los DFGs de formato *.dot a formato *.graphml (formato de grafos estándar escritos en xml). Ya teniendo los DFGs en *.graphml, estos pueden ser graficados y estudiados con la herramienta yEd [34]. Además, estando los DFGs en formato estándar xml, es posible leerlos desde lenguaje C con la librería pugixml [18].
Las características de cada uno de los DFGs del Mediabench (cantidad de nodos, cantidad de aristas y cantidad de operaciones) se detallan en la tabla 1.
Tabla 1 Características de los DFGs del banco de pruebas Mediabench para 20 circuitos
| DFG | Nodos | Aristas | Operaciones |
| HAL | 11 | 8 | 4 |
| MESA - Horner Bezier (MESA-HB) | 18 | 16 | 4 |
| Auto Regression Filter (ARF) | 28 | 30 | 2 |
| MPEG - Motion Vectors (MPEG-MV) | 32 | 29 | 4 |
| Elliptic Wave Filter (EWF) | 34 | 47 | 2 |
| Finite Input Response Filter 2 (FIR2) | 40 | 39 | 4 |
| Finite Input Response Filter 1 (FIR1) | 44 | 43 | 4 |
| JPEG - Smooth (JPEG-SD) | 51 | 52 | 5 |
| MESA - Feedback (MESA-FP) | 53 | 50 | 6 |
| EPIC - Collapse pyr (EPIC) | 56 | 73 | 7 |
| Cosine 1 (C1) | 66 | 76 | 5 |
| Cosine 2 (C2) | 82 | 91 | 5 |
| JPEG - Write BMP (JPEG-BMP) | 106 | 88 | 8 |
| MESA - Interpolate Aux (MESA-IA) | 108 | 104 | 5 |
| MESA - Multiplication (MESA-MM) | 109 | 116 | 4 |
| MPEG - Inverse (MPEG-IDCT) | 114 | 164 | 7 |
| JPEG - Inverse (JPEG-IDCT) | 122 | 162 | 6 |
| JPEG - Forward (JPEG-FDCT) | 134 | 169 | 6 |
| MESA - Smooth Triangle (MESA-ST) | 197 | 196 | 4 |
| MESA - Invert Matrix (MESA-IM) | 333 | 354 | 7 |
4. Algoritmos evolutivos multi-objetivo
4.1. Representación del problema
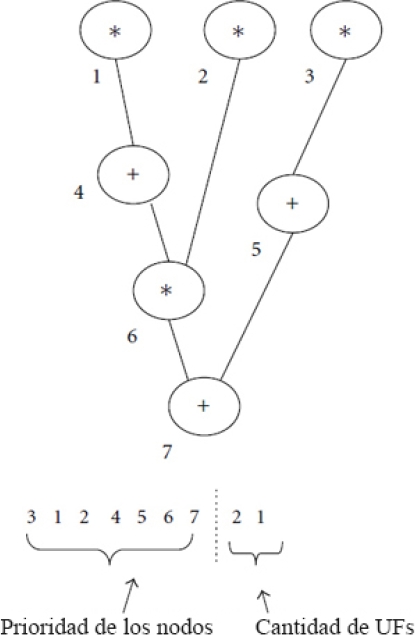
Para planificar un DFG es necesario contar con una representación que la defina. La representación se realiza con dos componentes [14, 15, 19]:
Prioridad de los nodos: representa el orden en que son ejecutados los nodos.
Cantidad de UFs: representa la cantidad de UFs disponibles para ejecutar las operaciones de los nodos.
En la figura 1, se observa un ejemplo de un DFG con una planificación descrita en los dos componentes de la representación. La prioridad de los nodos define primero ejecutar el nodo 3, luego el nodo 1 y así sucesivamente hasta el nodo 7. Y la cantidad de UFs establece que se tienen tres UFs (dos multiplicadores y un sumador).
En la figura 2, se muestra como queda el DFG planificado por ciclos de reloj según la disponibilidad definida de UFs, el orden de nodos a ejecutar y la dependencia de nodos en el grafo. En el primer ciclo de reloj habría que ejecutar las operaciones de multiplicación 3 y 1.
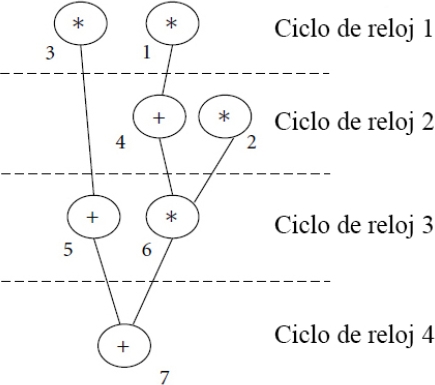
La operación 2 debe ejecutarse en el segundo ciclo de reloj porque las operaciones 3 y 1 ocuparon las dos UFs de multiplicación que habían disponibles en las restricciones de la cantidad de UFs.
En [14, 19, 24], se detallan todos los aspectos de la implementación de la representación del problema.
4.2. Estimadores de calidad
Cada planificación es sometida a 3 estimaciones para medir su calidad (retardo, área y potencia) y de esta manera poder hacer comparaciones. Estas estimaciones son propuestas en [14, 19, 20].
Retardo: Es el número de pasos de tiempo o ciclos de reloj necesarios para ejecutar el DFG. En el ejemplo de la figura 2 el retardo es 4 al ser calculado el DFG en 4 ciclos de reloj.
Área: Es el total de UFs más los registros necesarios para ejecutar a todos los nodos del DFG. La cantidad de UFs es conocida a partir de la planificación, sumando todos los valores de la cantidad de UFs. La cantidad de registros se obtiene con el algoritmo Left Edge, descrito en [12].
Potencia: Para estimar la potencia primero se crea un grafo de compatibilidad, donde un nodo i se relaciona con otro nodo j, si la operación del nodo j puede ejecutarse en la misma UF del nodo i. Para esto, tienen que tener el mismo tipo de operación y sus variables no pueden solaparse en el tiempo.
Luego, la potencia (P ) es calculada por la siguiente fórmula:
donde
En [14, 24], se detallan todos los aspectos de la implementación de los estimadores de calidad.
4.3. Algoritmos evolutivos multi-objetivo e indicadores de calidad
En este artículo, se propone optimizar los DFGs con MOEAs, y realizar comparaciones de los dos que mejor resultados alcanzaron en [24] junto con un MOEA que aún no ha sido utilizado en la literatura para este tipo de problema (NSGA-III). Se utiliza la plataforma de interfaz independiente para algoritmos de búsqueda (PISA, por sus siglas en inglés: Platform Independent Interface for Search Algorithms) [4, 3]. Los MOEAs propuestos son:
Con el objetivo de comparar la calidad de los Frentes de Pareto (FPs) alcanzados por cada MOEA, se utilizan 3 indicadores de calidad:
NSGA-II y SPEA2 fueron descritos en trabajo previo [24], a continuación se presenta el funcionamiento del algoritmo NSGA-III, dada la novedad de su utilización ante este problema de optimización.
4.4. NSGA-III
NSGA-III fue presentado en [8], como un nuevo algoritmo de ordenamiento no dominado enfocado en problemas de tres o más funciones objetivo. El algoritmo consiste en mantener el esquema general de NSGA-II, pero incorporándole una técnica de puntos de referencia [7]. Esta técnica sustituye al segundo criterio de selección -distancia de apilamiento- entre soluciones no dominadas. Estos puntos de referencia representan las regiones del FP que deben ser descubiertas, con el objetivo de mantener la diversidad en la población resultante de cada generación. Para discriminar entre las soluciones no dominadas se utiliza una función de utilidad, cuyo valor indica la relevancia de una solución para aproximar un punto de referencia. En la figura 3 [25], se muestra un ejemplo de la diferencia entre el funcionamiento de la distancia de apilamiento que emplea NSGA-II y la técnica empleada por NSGA-III. Todos los círculos representan los individuos del primer frente no dominado de la población, y los círculos negros representan los individuos seleccionados para la siguiente generación. La efectividad de este algoritmo fue analizada en varios problemas de hasta 15 objetivos en [8]. Los resultados experimentales mostraron que posee un desempeño competitivo respecto a dos versiones de MOEA/D [35] frente a problemas continuos.

La cantidad de puntos de referencia que se crean en el hiperplano está definido por la siguiente ecuación:
donde
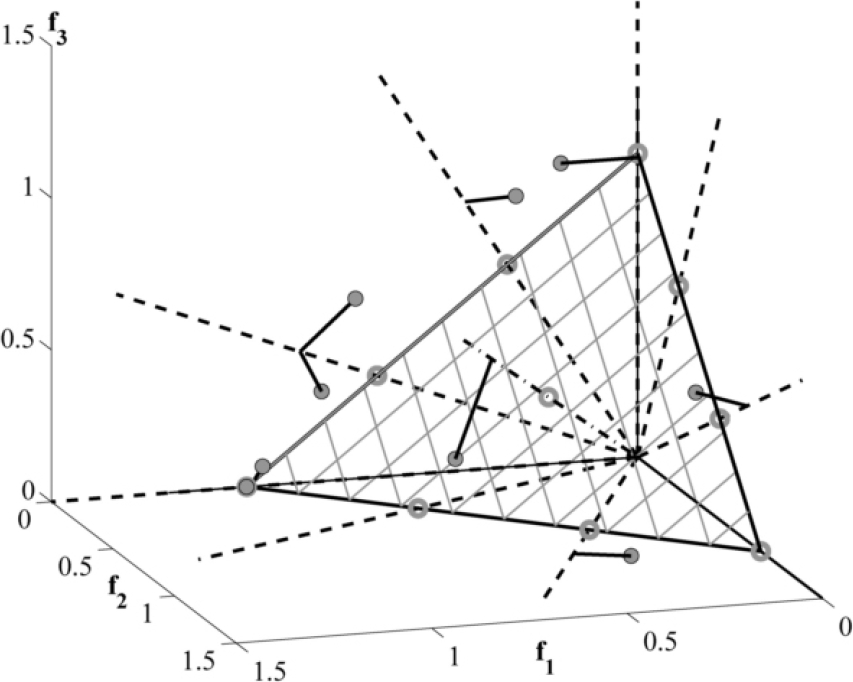
En la figura 4, se muestra un ejemplo de como se distribuyen 15 puntos de referencia en el hiperplano para un problema de 3 funciones objetivo. En la figura 5, se presenta un ejemplo de como se realiza la asociación de los individuos con los puntos de referencia [8].
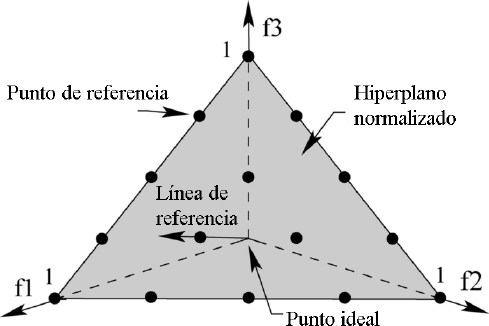
Fig. 4 Distribución de 15 puntos de referencia en el hiperplano para un problema de 3 funciones objetivo
El problema de optimización en HLS de asignación, mapeo y planificación puede tener más de 3 funciones objetivo [6]. Y en este caso, la utilización del algoritmo NSGA-III adquiere más importancia, ya que en [8] se demuestra su buen desempeño con muchas funciones objetivo (entre 4 y 15).
Todos los experimentos los realizamos en PISA, adaptando el artículo de [29] a esta plataforma, en donde se presenta una implementación del algoritmo en lenguaje C++.
En la figura 6, presentamos los puntos de referencia y el FP que alcanza NSGA-III contra el problema continuo DTLZ2 en 3 dimensiones [8], en donde se puede apreciar una buena distribución de individuos.

Otro ejemplo es mostrado en la figura 7, donde se presentan los puntos de referencia y el FP que alcanza NSGA-III contra el problema contínuo DTLZ4 en 3 dimensiones [8].
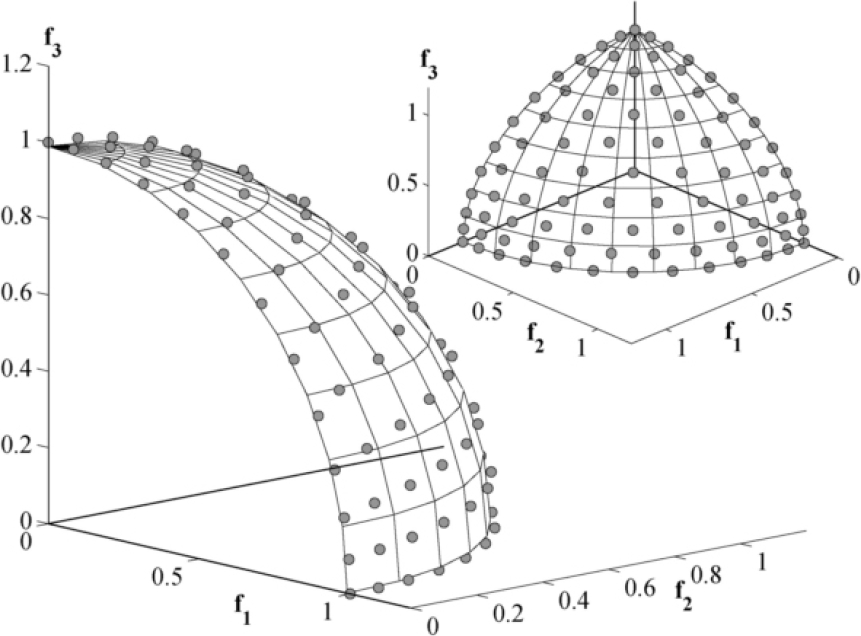
Los ejemplos anteriores son problemas continuos, sin embargo, nosotros pretendemos demostrar que NSGA-III puede tener el mismo rendimiento (mejorar la diversidad del FP) con un problema discreto como el de la optimización en HLS.
5. Resultados
En la tabla 2, se muestran los parámetros utilizados en todos los experimentos para los 3 MOEAs, posteriormente los resultados son analizados utilizando los 3 indicadores de calidad en la sección 4.3.
Tabla 2 Parametrización de los experimentos
| Parámetro | Valor |
|---|---|
| Número de corridas | 20 |
| Tamaño de población | 28 |
| Generaciones | 100 |
| Cantidad de evaluaciones | 2800 |
| Funciones objetivo | 3 |
5.1. Resultados de los indicadores de calidad
Se realizaron comparaciones entre NSGA-III y los dos MOEAs: NSGA-II y SPEA2. La tabla 3 presenta las medias del indicador de calidad Épsilon, la tabla 4 presenta las medias del indicador de calidad Hipervolumen y la tabla 5 presenta las medias del indicador de calidad R. Se señala en negrita el mejor resultado para cada DFG.
Tabla 3 Resultados de las medias del indicador de calidad Épsilon para los algoritmos NSGA-II, SPEA2 y NSGA-III
| DFG | NSGA-II | SPEA2 | NSGA-III |
|---|---|---|---|
| MESA-FP | 1.81E-01 | 1.54E-01 | 1.60E-01 |
| EPIC | 2.30E-01 | 2.24E-01 | 2.24E-01 |
| C1 | 1.60E-01 | 1.52E-01 | 1.46E-01 |
| C2 | 1.47E-01 | 1.37E-01 | 1.32E-01 |
| JPEG-BMP | 1.43E-01 | 1.51E-01 | 1.42E-01 |
Tabla 4 Resultados de las medias del indicador de calidad Hipervolumen para los algoritmos NSGA-II, SPEA2 y NSGA-III
| DFG | NSGA-II | SPEA2 | NSGA-III |
|---|---|---|---|
| MESA-FP | 2.42E-01 | 2.16E-01 | 2.31E-01 |
| EPIC | 3.28E-01 | 3.32E-01 | 3.50E-01 |
| C1 | 2.54E-01 | 2.28E-01 | 2.29E-01 |
| C2 | 2.29E-01 | 2.15E-01 | 2.50E-01 |
| JPEG-BMP | 2.21E-01 | 2.31E-01 | 2.42E-01 |
Tabla 5 Resultados de las medias del indicador de calidad R para los algoritmos NSGA-II, SPEA2 y NSGA-III
| DFG | NSGA-II | SPEA2 | NSGA-III |
|---|---|---|---|
| MESA-FP | 3.77E-02 | 3.17E-02 | 3.39E-02 |
| EPIC | 5.27E-02 | 5.18E-02 | 5.70E-02 |
| C1 | 3.53E-02 | 3.00E-02 | 2.87E-02 |
| C2 | 3.29E-02 | 2.96E-02 | 3.27E-02 |
| JPEG-BMP | 3.15E-02 | 3.35E-02 | 3.30E-02 |
La tabla 6 presenta los porcentajes de mejoras para cada DFG. Las mejoras son de NSGA-III respecto a NSGA-II y SPEA2. Se señalan en negrita los resultados positivos.
Tabla 6 Porcentajes de mejoras para cada caso de NSGA-III respecto a los algoritmos NSGA-II y SPEA2
| Mejora respecto al MOEA | Indicador de calidad | MESA-FP | EPIC | C1 | C2 | JPEG-BMP |
|---|---|---|---|---|---|---|
| NSGA-II | Épsilon | 11.60 % | 2.61 % | 8.75 % | 10.20 % | 0.70 % |
| Hipervolumen | 4.55 % | -6.71 % | 9.84 % | -9.17 % | -9.50 % | |
| R | 10.08 % | -8.16 % | 18.70 % | 0.61 % | -4.76 % | |
| SPEA2 | Épsilon | -3.90 % | 0.00 % | 3.95 % | 3.65 % | 5.96 % |
| Hipervolumen | -6.94 % | -5.42 % | -0.44 % | -16.28 % | -4.76 % | |
| R | -6.94 % | -10.04 % | 4.33 % | -10.47 % | 1.49 % |
La tabla 7 presenta la cantidad de casos y porcentaje que fue mejor el algoritmo NSGA-III respecto a los algoritmos NSGA-II y SPEA2.
Tabla 7 Cantidad de casos y porcentaje que fue mejor el NSGA-III respecto a los algoritmos NSGA-II y SPEA2
| MOEA | Indicador de calidad | Casos que fue mejor | Porcentaje respecto a casos totales |
| NSGA-II | Épsilon | 5 | 100 % |
| Hipervolumen | 2 | 40 % | |
| R | 3 | 60 % | |
| SPEA2 | Épsilon | 3 | 60 % |
| Hipervolumen | 0 | 0 % | |
| R | 2 | 40 % |
En la mayoría de los casos, NSGA-III es mejor respecto a NSGA-II, con un 2.62 % de mejora promedio. Sin embargo, en casi todas las comparaciones de NSGA-III respecto a SPEA2, los resultados son negativos. También se observa que según el indicador de calidad Épsilon, NSGA-III respecto a NSGA-II tiene un promedio de mejora de 6.77 % con los 5 DFGs analizados.
Al analizar los FPs de NSGA-III, no existe una mejora significativa en la diversidad de los individuos, por lo que la hipótesis planteada no se cumplió. Notamos que la diversidad es muy parecida a la del NSGA-II y SPEA2. Sin embargo, NSGA-III en algunos casos logra ligeramente una mayor convergencia. Esto lo apreciamos cuando analizamos los FPs. En la figura 12 se presenta un ejemplo, con una gráfica del espacio objetivo y los FPs obtenidos por los MOEAs NSGA-II, SPEA2 y NSGA-III para el DFG C1.
5.2. Gráficas de datos de los procesos evolutivos
Crear gráficas de las trazas de datos del proceso evolutivo nos permite detallar el comportamiento del mismo. De esta manera se pueden detectar debilidades y luego, con más precisión, se pueden proponer mejoras. Conociendo los datos, es posible crear gráficos de tendencia para analizar el comportamiento de la búsqueda.
Donde por cada generación, se observa la cantidad de individuos mutados que dominan a su padre, la cantidad de individuos cruzados que dominan al menos a uno de sus padres, la cantidad de individuos no-dominados en la población hija y la cantidad de individuos diferentes en la población hija.
En la figura 9, se presenta una gráfica de tendencias de los datos correspondientes a NSGA-II para el DFG C1. En la figura 10 se presenta una gráfica de tendencias de los datos correspondientes a SPEA2 para el DFG C1. En la figura 11 se presenta una gráfica de tendencias de los datos correspondientes a NSGA-III para el DFG C1.

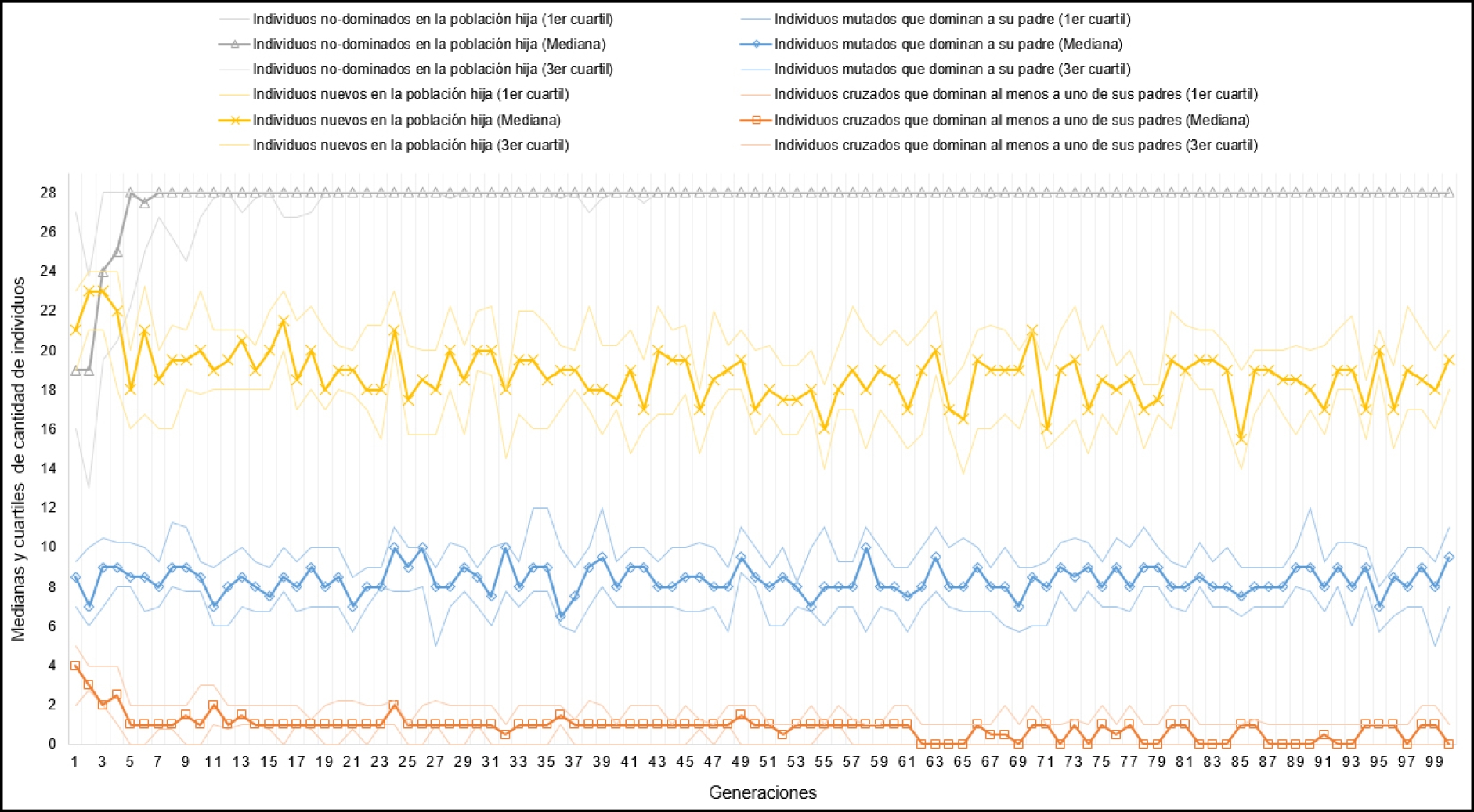
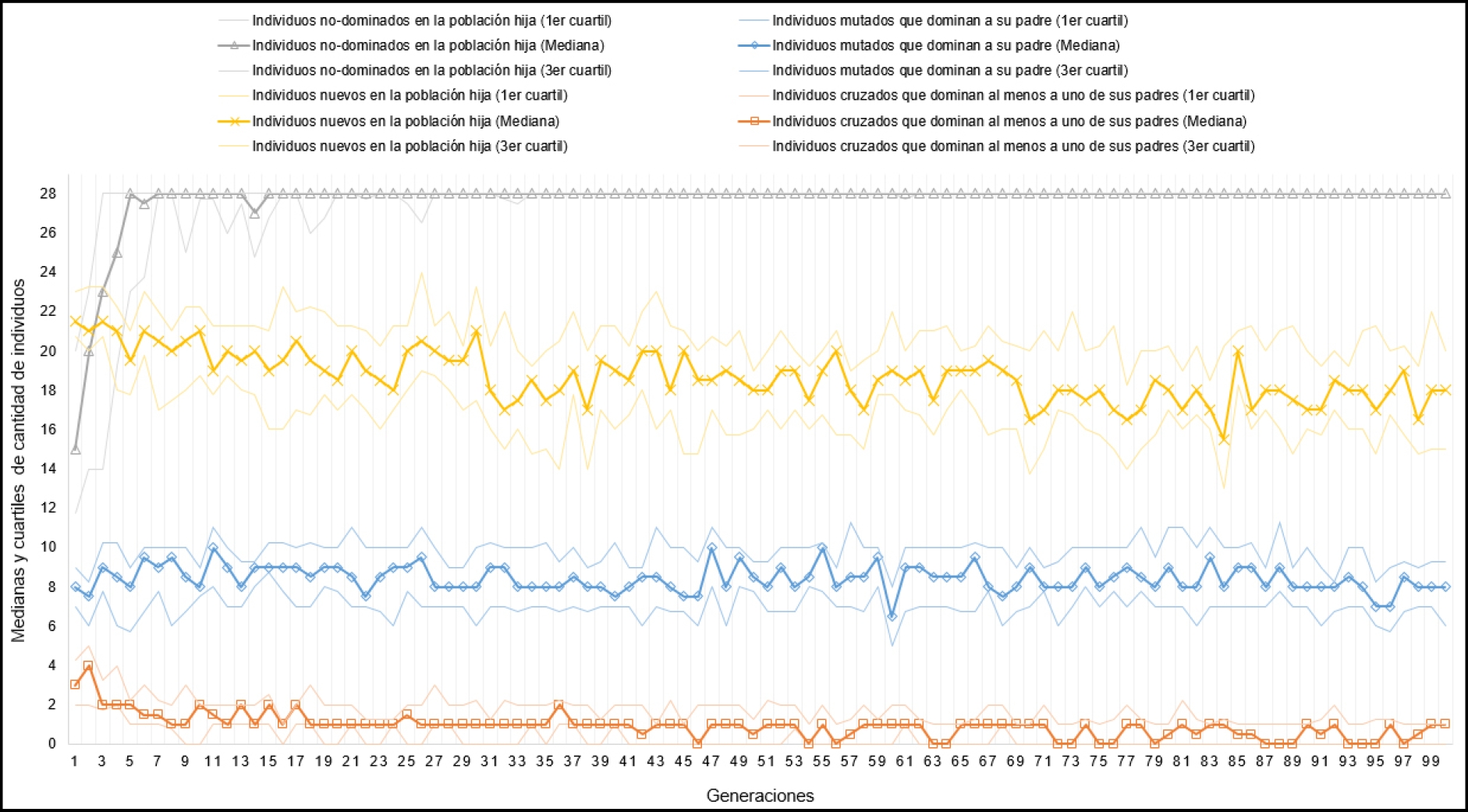

En las figuras anteriores se observan varios comportamientos interesantes. Existe mucha redundancia de individuos en las generaciones, debido a que los operadores de búsqueda en muchas ocasiones generan individuos iguales a los padres. El cruzamiento no está explorando bien el espacio de búsqueda, ya que es muy baja la cantidad de hijos que dominan a sus padres. Incluso se puede notar, que para los tres MOEAs disminuye la cantidad de hijos que dominan a sus padres obtenidos del cruzamiento, a medida que avanzan las generaciones.
Con el algoritmo NSGA-III se demora más en tener en todas las corridas una población completa no dominada, con respecto a los otros dos MOEAs. Estos temas serán estudiados a más detalle en trabajo futuro.
Además, en [16], ampliamos la información del espacio objetivo, graficando el movimiento generacional de los individuos para los MOEAs NSGA-II y NSGA-III utilizando 5 DFGs (una de las 20 corridas con 100 generaciones).
Notamos que con NSGA-III los individuos convergen más aceleradamente con respecto a NSGA-II. Esta característica se acentúa proporcional a la cantidad de nodos del DFG. Sin embargo, notamos que con NSGA-III hay mayor redundancia de individuos en las poblaciones.
6. Conclusiones y trabajo futuro
Fue demostrada la factibilidad de usar MOEAs en la etapa HLS. Al realizar la comparación entre los tres MOEAs, NSGA-II, SPEA2 y NSGA-III, se pudo apreciar que las soluciones obtenidas por NSGA-III mejoran a las soluciones obtenidas por NSGA-II, pero no a las obtenidas por SPEA2.
Sin embargo, según el indicador de calidad Épsilon, NSGA-III tiene un mejor desempeño que los otros dos algoritmos. Además, las gráficas con las trazas de datos del proceso evolutivo, ayudaron a descubrir debilidades que pueden ser mejoradas.
Como trabajo futuro, se plantea implementar una técnica que elimine la redundancia en las poblaciones de individuos en el proceso evolutivo, esta redundancia fue detectada en las gráficas de tendencias de los datos que se realizaron. Además, antes de evaluar los individuos en las funciones objetivo, se quiere verificar si ya se había validado un individuo igual, para posteriormente realizar mas generaciones. Pretendemos analizar el artículo NSGA-III en [33] y validar una posible adaptación a ese procedimiento. Finalmente, investigar si añadir más funciones objetivo al problema de optimización de HLS es adecuado, y si es así, entonces seguir empleando NSGA-III.

