











 nova página do texto(beta)
nova página do texto(beta) Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
Permalink1 Introduction
In recent years, consensus in multi-agent systems (MAS) has attracted considerable attention in Computer Science and Control Theory since it allows to solve complex problems such as formation control with trajectory tracking.
Some previous results related to consensus problems in MAS are introduced in 14 and 4, where an overview of methods for convergence and analysis of consensus algorithms are presented. The development of consensus algorithms for linear and nonlinear systems is presented in 15 and 12, and a Lyapunov function is proposed to study the convergence of the consensus algorithms. In 6 and 20, necessary and sufficient conditions for an appropriate decentralized linear stabilizing feedback are established.
In 16, the problem of flocking with obstacles is addressed, where flocking is defined as achieving both structural and navigational stability. The systems considered are restricted to have integrator dynamics, and stability results are not presented.
A feedback control strategy that achieves convergence of a MAS, for single-integrator dynamics, with a desired formation and avoiding collisions is proposed in 1. A connection between formation infeasibility and a sort of fiocking is established. Consensus of multiple autonomous vehicles is addressed in 7, by using virtual leaders and artificial potential fields among neighboring vehicles. Results are also restricted to vehicles with integrator dynamics. A decentralized dynamic controller dealing with the problem of cooperation among a collection of vehicles is presented in 3 and 9.
The problems of consensus (synchronization), model-reference, and regulation for a network of identical multi-input, multi-output linear MAS are considered in 22. That work proposes a distributed protocol to solve such problems for network Laplacian topologies and asymmetric topologies.
In 2, consensus output regulation of network connected MAS is addressed. Every agent is represented by a nonlinear system, and has identical dynamics. A consensus control design is proposed to ensure the convergence of all the agents to the same desired output trajectory by exploiting the internal model approach. The control design uses only the relative outputs of the agents, and it does not require the estimation of agent state variables.
The cooperative output regulation of linear MAS is considered in 17, where only a subset of subsystems can access the reference exogenous signal. The problem is solved by means of the design of distributed observers, and a dynamic full information distributed control scheme.
The simultaneous problem of consensus and trajectory tracking of linear multi-agent systems is considered in 11, where the dynamics of each agent is represented by a single-input single-output linear system and neither the structure nor the dimension of the representation of the agent dynamics are restricted to be the same. This problem was solved by a distributed control strategy, where the trajectory and the formation of the agents are achieved asymptotically even in the presence of switching communication topologies and smooth formation changes.
An approach to regulation of multi-agent linear systems is presented in 18, where the authors demonstrate zero tracking error under switching topologies using observers, but each agent observer is based on the exosystem output and on the states of the observers of its neighbors. In 21, the regulation of MAS with uncertainties on the matrices of the system is addressed. The results presented in that paper assure zero tracking error even when only a subset of the systems has access to the reference signal based on an internal model approach. The robust regulation of multi-agent linear systems considering uncertainties is addressed in 19. The results obtained provide sufficient conditions for multi-agent zero tracking error under switched communication topologies based on a canonical internal model approach.
Problems related to multi-agent formation have been extensively undertaken, however as far as the authors know, the problem of solving simultaneously output regulation and output consensus of multi-agent switched linear systems has not been addressed before, and given the switched nature of the agent dynamics, the application of previous results on regulation of MAS with switching topologies based on the canonical internal model is not straightforward and the existence of a solution cannot be guaranteed.
This paper presents the design of a distributed control law for a class of switched linear MAS, with switching communication topologies, where the output is the only information transmitted between the agents, and only a subset of them has access to the reference (output of the virtual agent). The virtual agent can be imagined as a transmitter providing the trajectory information for the group of agents or a real agent already regulated. The communication among the agents can be represented by a switching graph, containing a spanning tree. Given that the present approach focuses on output consensus, each of the agents is allowed to have different dynamics and state dimension.
In order to reach output consensus, the agents should have the same output dimension and it is considered that each agent has to follow the same reference provided by an exosystem, whose structure is known. Under such assumption, every agent is capable of computing the exosystem state by means of an observer. This approach is similar to the one presented in 18, however, the difference with the present work is that here, the observer depends only on the outputs of the neighbors of each agent. The proposed approach starts by computing a local feedback control law for all the linear systems that compose the switching dynamics of an agent. Such local feedback control is computed to ensure the existence of a common Lyapunov function to all linear systems of the agent, and this global Lyapunov function is used to guarantee the stability of the switched regulation and consensus error.
This work is organized as follows. Preliminary results used for the aims of this work are presented in Section 2, along with some basic notation. In Section 3, the problem of distributed output consensus and output regulation of multi-agent systems under switching communication topologies is defined. The main result and its development is shown in Section 4. An illustrative example is presented in Section 5, and finally, some conclusions are presented in Section 6.
2 Notation and Preliminaries
2.1 Graph Theory and Communication Topology
The exchange of information among the agents of a system is commonly described by a graph 𝒢 = (ϑ,Φ, 𝒜), where ϑ is a set of nodes (agents), Φ ∈ ϑ x ϑ is a set of edges that connect a node to another (self edges are not allowed), and 𝒜= [α
i,j
] ∈ ℝ
NxN
is its adjacency matrix containing positive weights describing the relationships among nodes. The Laplacian 𝓛 will be defined as 𝓛= diag {
Let 𝒢 be a connected graph in which no cycles exist; then it is called a tree. A graph 𝒢 is said to have a spanning tree if every one of its nodes and a subset of its edges form a tree, which means that at least one of the nodes has a communication path to every other node.
In this work, given that switching communication topologies are considered, a switching graph becomes necessary. A switching graph will be defined as 𝒢ᵨt = (ϑ,Φᵨt, 𝒜ᵨt ), where ϱt : [t 0 , ∞) → {1,...,γ } is the switching signal that determines the communication topology at time t. It will be considered that the set of nodes ϑ is constant and that the condition (Vj Vi,) ∈ Φᵨt ⇒ (Vj Vi,) ∉ Φᵨt is met. The set of neighbors of node i at time t, Θ iᵨt , will be defined analogously as Θ iᵨt = {Vj: (Vj Vi,) ∈ Φᵨt , j = l,...,N} and ρ iᵨt =|Θ iᵨt | its cardinality.
2.2 Switched Linear Systems
A Switched Linear System (SLS) V = 〈𝓕, σt〉 is a hybrid dynamical system where 𝓕 ={Σ 1, Σ 2, ..., Σ k } is a collection of linear systems of the form
 1
1
where σ t : [t0 ∞) →{1,..., k} is the switching signal that determines the evolving linear dynamics, x(t) ∈ ℝ n, u(t) ∈ ℝ m, y(t) ℝ q, are the state, input and output variables, respectively, and Α σt , B σt and C, σt ∈ {1,...,k} are constant matrices of appropriate dimensions.
Remark 1 In systems as (1), it is often considered that y(t) = C σt x(t), but for the objective of this work we restrict ourselves to consider systems of the form (1) with C σt = C for all σt, ∈ {1 ... k}.
2.2.1 Lyapunov Stability
The switched linear system (1) under a state feedback control
 2
2
is uniformly asymptotically stable if there exist a positive constant g and a class K𝓛 function ƒ such that for all switching signals σ t the solutions of (1) with |x(0)| ≤ g satisfy
If the inequality (3) is valid for all switching signals and all initial conditions, the system (1) under a state feedback control (2) is globally uniformly asymptotically stable (GUAS).
A positive definite continuously differentiate function V : ℝ n → ℝis a common Lyapunov function for the family of systems 𝓕 if there exists a positive definite continuous function Q : ℝ n → ℝ such that
 4
4
Then, the following result on stability can be stated.
Lemma 1 (Theorem 2.1 ( 8 )) If all systems in the family 𝓕 with control (2) share a radially unbounded common Lyapunov function V(x(t)), then the switched system (1) is globally uniformly asymptotically stable (GUAS).
This result assures the stability of the SLS system under any switching sequence. It is important to mention that if a common Lyapunov function for the SLS is not found, it is not enough proof to assert that a SLS is unstable.
The following result from 13 will be used afterwards.
Lemma 2 If there exist a symmetric positive definite matrix Ρ ∈ ℝ n x n and matrices Zσt ∈ ℝ m x n , σt = {1, ··· ,k}, such that

then the switched control law (2) with
Kσt = Z σt P-1,
assures the closed-loop stability of the switched system (1).
In this way, it is possible to state the problem of finding a common Lyapunov function for a SLS system as a Linear Matrix Inequality (LMI) problem to compute a switched state feedback.
2.2.2 Output Regulation
Let the system
where w(t) ∈ℝp and S ∈ℝ p x p, be an exosystem from which a reference yr(t) = Rw(t) will be defined for an SLS system and consider the input to the SLS as
 6
6
Then, from 10, the problem of Output Regulation via Full Information for SLS (ORFI) consists in, given Ασι, Bσι, C, R, S and having full access to x(t), and ω(T), finding a feedback control law of the form (6) such that
system (1) with control (2) is asymptotically stable under arbitrary switching laws, and
for each initial condition x0, the solution x(t) of system (1) with (6) is such that y(t)-yr(t) tends to zero uniformly under arbitrary switching laws.
Consider the following hypotheses.
Hypothesis 1 (H1) System (5) is antistable, i.e. all the eigenvalues of S have nonnegative real part.
Hence, it is guaranteed that the reference will never tend to zero and will be continuously changing.
Hypothesis 2 (H2) The pair (R, S) is detectable.
Hypothesis 3 (H3)
System (1) with control (2) has a common Lyapunov function.
There exists a solution matrix Uj to the following equation

Hypothesis 4 (H4) It will be considered that the evolving dynamics of system (1) and its switching instants are always known.
Lemma 3 (( 10 ), Theorem 1) Assume (H1) and (H3). Then the ORFI of switched system (1) is solvable only if ∀h, σt = 1, 2, · ,k, the following condition holds:
where s is the index of the pair(C, A σt - Bσt K σt ).
A more restrictive condition is given if (Aσt -BσtKσt, C) is observable, as in the following result.
Lemma 4 (( 10 ), Theorem 2) Assume (H1), (H3), and that (Aσt - BσtKσt, C), σt = 1,2,···,k is observable. Then the ORFI of (1) is solvable if and only if Πh = Π σt, for h, σt = 1,2, · ,k.
From Lemma 3, it is clear that under Hypotheses (H1) and (H3) a sufficient condition for the problem of ORFI to be solvable is the following: if the subset of observable states of every subsystem ∑h ∈ 𝓕 is the same, the elements of Π h corresponding to observable states have to be equal to those of Πσt for h, σt = 1,2, ··,k.
A class of SLS systems that satisfies the previous condition is the class of SLS systems of the form
 7
7
for σt = 1, 2, ··· ,k, where x1(t) ∈ ℝ η -q, x2(t) ∈ ℝq, x3(t) ∈ ℝn- η, u(t) ∈ ℝm, q ≤ m, B 1, σt is a full row rank matrix. The submatrices A1 and A2 represent the non-switching part of the system.
Additionally, let

the subsystem
 8
8
must be controllable.
The values of Πi corresponding to the observable part of the linear subsystems are determined by their non-switching part, therefore they are equal for every linear subsystem. The subsystem ẋ3(t) = A7, σt x3 (t) + B2, σt u(t) represents the unobservable part of the system.
The previous systems (7) are introduced to be used in the simulation example. It is worth noting that the results presented are not restricted to such systems.
3 Problem Statement
Consider a MAS consisting of Ν agents with different SLS dynamics of class (7) described by
 9
9
where, Xi(t) ∈ ℝ ni is the state, ui(t) ∈ ℝ mi the control, and yi(t) ∈ ℝq the output of the i-th agent, and a virtual reference agent whose dynamics is represented by the exosystem (5) with output
 10
10
where R ∈ ℝq x p
Remark 2 It is considered that rank {Ci} = q, ∀i.
Let 𝒢ᵨ t be a switching graph representing communication among the SLS agents of system (9) together with the exosystem (5) where ᵨ t: [t0, ∞) → {1,..., υ} is the switching signal that determines the evolving communication topology, then the following hypothesis is assumed.
Hypothesis 5 (H5) The graph 𝒢ᵨt
does not contain loops, (vi, vj) ∈ Φᵨ
t
⇒ (vj,vi) ∉ Φᵨt, and incorporates a spanning tree with root on , the reference agent for a given ᵨt.
, the reference agent for a given ᵨt.
For a MAS, the consensus is achieved by the states of the agent if all of them converge to the same value. In this work only the output is considered in the consensus, i.e., it is required that limt→∞ |yi - yj| = 0 for all i, j = 0,1,...,N. Additionally, the output regulation deals with the problem of a system following an exosystem where lim t→∞ |Cx(t) - Rw(t) | = 0. Now, we define the switching i - th agent output consensus and output regulation error as
 11
11
Note that the weight αi,j,ᵨt, is zero if agent i does not receive information from agent j , similarly, the weight αi,0,ᵨt applies to the difference between the i-th agent output and the virtual agent (reference) output (10). Remember that these weights depend on ᵨt (the evolving communication topology).
Thus, the problem of distributed output regulation and output consensus of SLS multi-agent systems under switching interaction topologies consists in obtaining a distributed control law such that every agent output consensus and tracking error ζiᵨt (t) tends to zero asymptotically under any communication switching sequence of ᵨt.
This problem is addressed and solved in the next section.
4 Distributed Output Regulation and Output Consensus Control
For ease of notation and without loss of generality, consider the controllable part (8) of Ν SLS agents in the form (7) as in (9).
Given that only a subset of the SLS agents will have access to reference (10) and none of them to the exosystem state (5), the following observers are proposed:
 12
12
where ki is such that the matrix (S - KiR) is Hurwitz. Now, set the distributed output regulation control law as
 13
13
for σ
it
∈ {1, · · · h
i}. Note that control (13) is of form (6) and depends on the exosystem observer state  (t).
(t).
Define the i-th observer error as
 14
14
hence, its dynamics will be described by
 15
15
Consider that Hypothesis (H3) is met, then the i-th agent regulation error can be defined as
 16
16
and its dynamics is given by
 17
17
From (14) and (16), we have that
 18
18
In order to save space, let us work with the second term in (15) substituting Vj as in (18):
 19
19
Hence,
 20
20
and
 21
21
Using (21) we can restate the i-th observer and regulation error dynamics (15), (17) as
 22
22
 23
23
Define the i-th agent observer-regulation error as
 24
24
and SLS multi-agent observer-regulation error as
 25
25
Consider that Hypothesis (H5) is met, then given any communication topology 𝒢γ0, there exists an order for the systems (Oγ0), such that the Laplacian 𝓛γ0 is a lower triangular matrix. Thus, reordering the agents according to the order Oγ0, the SLS multi-agent observer-regulation error dynamics will have a block lower triangular form
 26
26
where the matrix Āγ0 can be described as follows: where
 27
27
with indexes according to the order Oγ0 and switched matrix blocks
 28
28
on its diagonal, where ξ ᵨt (t) = T ᵨt ξ(t) for ᵨt = γ0 and Tᵨt ∈ ℝΣ ni x Σ ni · is a transformation matrix, which changes the order of the agents.
Hence, it is clear that the SLS multi-agent observer-regulation error will have switched linear dynamics
 29
29
where Ãᵨt ∈ ℝΣ ni x Σ ni.
Now the main result of this work can be stated.
Theorem 1 Let Ν SLS agents be of form (7), with a switching communication topology such that Hypothesis (H5) is met. Consider also, that Hypotheses (H1)-(H4) are met, then the distributed output regulation and output consensus of the SLS multi-agent system can be solved by a control law of form (13).
Proof: Consider an SLS multi-agent system with agents of the form (7), an exosystem (5) with output (10), and control law (13).
Then, under Hypothesis (H5) and a given order Oγ0, the corresponding SLS multi-agent observer-regulation error will have form (26). Given Hypothesis (HZ), the switched block matrices Ω i,σit are such that there exist positive definite matrices P i and Q i,σit , for which the equations
 30
30
are met.
A common Lyapunov function for system (26) is selected as
 31
31
where
 32
32
onsider V1(t), whose derivative
 33
33
is clearly negative, independent from the value of ξ1(t). Thus, the observer-regulation error ξ 1(t) is stable. For its V2 (t)derivative is
 34
34
hence, given the stability of ξ1(t) the terms with β2,1 will become zero and the derivative of V2(t) will be negative, therefore, the observer-regulation error ξ2(t) is stable. The same reasoning can be applied to the rest of the Vi (t)'s:
 35
35
In this way, we conclude that the derivative of the common Lyapunov function (31) is negative, and as a result, the observer-regulation error (26) is stable.
Given that the diagonal blocks are always the same for a given agent, the previous procedure can be carried out for any order Oᵨt, then function (31) is a common Lyapunov function for the observer-regulation error system (29), which is thus ultimately bounded.
Finally, given the stability of the observer-regulation error (29), the following holds in steady state
 36
36
 37
37
 38
38
thus, the i-th output consensus and tracking error ζ iᵨt (t) = 0 for i = 1,2,··· ,N.
5 Example
The following example illustrates the results presented in this paper. Consider 3 agents with the dynamics
ẋi = A i, σitxi + Bi,σit ui
yi = Cixi,
where

with initial conditions

The communication topology of the multi-agent system, including the systems above, is considered to be switching every 250 milliseconds on a cyclic sequence {1 ,2, 3, 4, 1, ...} following Laplacian matrices
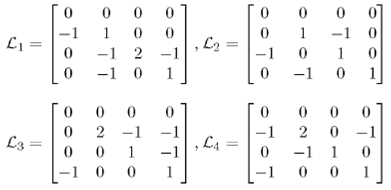
Note that the first row corresponds to the reference node, hence, the minus one in the first column indicates which agent receives the virtual agent's output.
Let the reference exosystem be
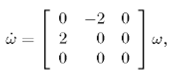
consider the initial conditions

and take the reference matrix as
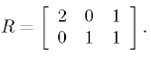
From Lemma 2, the stabilizing feedback matrices calculated for the system by a LMI as in 13 are

and the corresponding Γ matrices are given by

The references and the trajectories of the outputs of the multi-agent system obtained in simulation are shown in Fig. 1 and Fig. 2. As it can be seen, the outputs yi,1 and yi,2 follow the same trajectory and converge to the same reference, respectively. The exosystem ω is in this case composed by a sine function ω1, a cosine function ω 2, and a constant ω3 = 1. The value of the reference is attained by every output.


Fig. 3 displays the behavior of the regulation error (17), while Fig. 4 displays the regulation error with respect to the state of the exosystem errori = xi - Π iω. From these figures, it can be observed that most of the errors tend to zero except the dashed lines on errors of system 2 that remain bounded.
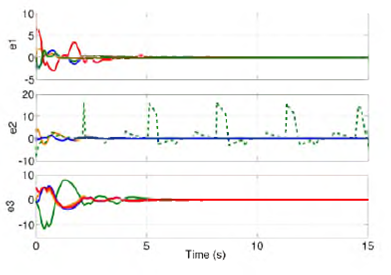
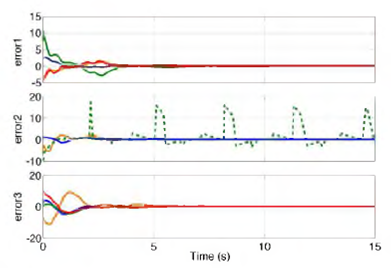
The dashed lines on the errors of system 2 do not decay to zero because the corresponding state does not share the same terms on the corresponding matrix Π. But this error does not affect the regulation given that such a state is not observable.
6 Conclusions
This work presented the design of a distributed control law for output consensus and output regulation for a group of SLS agents of class (7) under switched communication topologies.
The proposed strategy achieves the output regulation and consensus of the SLS multi-agent system, under switching communication topologies, preserving a desired formation even when only a subset of the agents has access to the reference, and none of them have access to the state of the exosystem.
The observer-regulation error stability is guaranteed by properly selecting the stabilizing error feedback Ki,σit to assure the existence of a common Lyapunov function for the i-th system.
The results of this paper can be extended by dropping assumption (H4) applying the results presented in 5. Also, a study of other control techniques in order to deal with discrete communication with delays can be performed.

