










Serviços Personalizados
Journal
Artigo
 texto em
texto em  Inglês (pdf)
Inglês (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Acessos
Acessos
Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkAgrociencia
versão On-line ISSN 2521-9766versão impressa ISSN 1405-3195
Agrociencia vol.51 no.8 Texcoco Nov./Dez. 2017
Crop Science
Computation of suboptimal temperature trajectories with the Monte Carlo method to maximize greenhouse tomato (Solanum lycopersicum L.) production
1 Programa de Robótica y Manufactura Avanzada del CINVESTAV Saltillo.
2 Departamento de Botánica. CINVESTAV Saltillo.
3 Departamento de Maquinaria Agrícola. CINVESTAV Saltillo.
4 Departamento Horticultura de la UAAAN, Saltillo. (abmoralesd@gmail.com)
The objective of this study was to obtain a suboptimal temperature trajectory to maximize fresh weight (WF) and harvested fruit weight (WF) of tomato (Solanum lycopersicum L.) using the Monte Carlo method. We posed a problem of dynamic optimization based on a non-linear dynamic crop growth model under greenhouse conditions. In the solution of this problem temperature restrictions in the range of 15 °C to 30 °C, which represents the mean temperature range during the day in the city of Saltillo. Optimization is done considering prediction horizons of 15 min in an interval of 120 d after transplant (dat) and using a dynamic mathematical tomato (Solanum lycopersicum L.) growth model evaluated in a chapel-type greenhouse in Saltillo, Coahuila (25°25’36” N, 100°59’44” O). The suboptimal temperature trajectory that maximizes fruit weight (WF) was determined for the entire simulation time interval (0 to 120 dat). Moreover, the suboptimal temperature trajectory that maximized fruit weight (WF) during pre-harvest (0 to 58 dat) and harvested fruit W HF ) as of the beginning of harvest (day 59), described by the model until the end of simulation (120 dat). The results obtained show that the suboptimal temperature trajectory from day 59, which marks the beginning of harvest, was established around 15 °C to maximize W F and around 30 °C for maximization of W F and W HF . It could also be observed that the suboptimal temperature trajectory for both cases shows periods that emulate day and night, 15 °C to 30 °C, before day 59. The results obtained permit us to propose conditions for either maximizing fruit on the plant or harvested fruit, and the resulting temperature trajectories can be used to obtain a softened curve with more stable cycles that can be put into practice.
Key words: model of tomato growth dynamics; production maximization; Monte Carlo method
El objetivo de este estudio fue obtener una trayectoria subóptima de la temperatura requerida para maximizar la producción de peso fruto (W F )y fruto cosechado (W HF ) de tomate (Solanum lycopersicum L.) mediante el método de Monte Carlo. Así se plantea un problema de optimización dinámica basada en un modelo dinámico no lineal del crecimiento del cultivo en condiciones de invernadero. En la solución de este problema se utilizan restricciones en la temperatura de 15 °C a 30 °C en un intervalo; éste que representa el intervalo medio de temperatura durante el día en la ciudad de Saltillo, se realiza la optimización considerando horizontes de predicción de 15 min en un intervalo de 120 d después del transplante (ddt) y usando un modelo dinámico matemático de crecimiento del cultivo de tomate (Solanum lycopersicum L.) evaluado en un invernadero tipo capilla, en Saltillo, Coahuila (25°25’36” N, 100°59’44” O). Para realizar esto se determinó la trayectoria subóptima de temperatura que maximiza el peso de fruto (W F ) en todo el intervalo de tiempo de la simulación (de 0 a 120 ddt). Además, se determinó la trayectoria subóptima de temperatura que maximizó el peso de fruto (W F ) durante el intervalo de tiempo de precosecha (de 0 a 58 ddt) y de peso de fruto cosechado (W HF ) a partir del inicio de la etapa de cosecha (día 59), descrita por el modelo hasta el final de la simulación (120 ddt). Los resultados obtenidos muestran que la trayectoria subóptima de temperatura desde el día 59 que marca el inicio de la cosecha se estabilizó alrededor de 15 °C para la maximización de W F y alrededor de 30 °C para la maximización de W F y W HF . Asimismo puede observarse que la trayectoria subóptima de temperatura para ambos casos muestra períodos que emulan el día y la noche, alrededor de 15 °C a 30 °C antes del día 59. Los resultados obtenidos permitirán plantear condiciones para ya sea maximizar el fruto en la planta o el fruto cosechado y pueden usarse las trayectorias de temperatura obtenidos para obtener una curva suavizada con ciclos más estables que pueden ser llevados a la práctica.
Palabras clave: modelo dinámico de crecimiento de tomate; maximización de la producción; método de Monte Carlo
Introduction
Tomato (Solanum lycopersicum L.) is the most economically important vegetable crop in the world. It is used both fresh and processed (Mehdizadeh et al., 2013). Tomatoes are second to potatoes (Solanum tuberosum L.) worldwide in production, but they are first as a processed crop (Mehdizadeh et al., 2013). In Mexico, tomatoes occupy 70 % of the crop area under conditions of protected agriculture, followed by peppers (Capsicum annumm L.), 16 %, and cucumbers (Cucumis sativus L.), 10 % (SAGARPA, 2012). Moreover, Mexico is the largest exporter of tomatoes worldwide, exporting mostly to the USA, Canada and El Salvador (MEXICOPRODUCE, 2012).
Although agriculture is one of humankind’s oldest activities, it is only recently that information systems and automatic control have been used to improve crop quality and productivity. Since the 1970s, control strategies have been studied to optimize greenhouse crop production, and dynamic models have been proposed to predict effects caused by modifying environmental factors such as temperature, moisture, quantity of carbon dioxide (CO2) and photosynthetically active radiation (PAR) inside the greenhouse. These studies have been conducted mainly in Europe, where it necessary to reduce operation costs of both heating and air conditioning systems used to protect the plants from extreme winter and summer temperatures (Van Straten et al., 2011).
One of the main objectives of agricultural research is to increase crop yields sustainably and improve produce quality. For this reason, use of system analysis and crop modeling techniques to estimate production potential and to define strategies, tactics and decisions have increased (Castilla-Prados, 1995).
Greenhouse crop mathematical models
Mathematical crop models simulate characteristics such as growth through several plant physiological processes, for example, photosynthesis, respiration, transpiration and crop development. These models can put to test different hypotheses on crop performance without the need to conduct experiments, thus reducing costs. Good approximations can be obtained with mathematical crop models when they are suitably calibrated and evaluated (Bouman et al., 1994, Wallach et al., 2006).
Studies on application of models to greenhouse crops have been developed in The Netherlands where dynamic models based on biological processes have also been developed. Initially, these studies were developed in numerical form using principles of biological balances, evaluated against experimental data, and finally applied in crop systems (Van Straten et al., 2011).
For tomato, several growth models have been developed over the years, some very simple and others very complex. A deterministic greenhouse tomato growth model written in Pascal language was developed based on a model of leaf assimilation plus a theory of respiration and another of the range of photosynthesis, which is controlled by environmental conditions and carbohydrate contents in the leaves. The model was applied to estimate the effect of CO2 enrichment on tomato fruit production (Kano and Van Bavel, 1988). For dry matter distribution among plant leaves, stem, root and fruits, Heuvelink and Marcelis (1989) developed a dynamic model. Their results of simulation of dry matter among tomato leaves, stems and fruits corresponded reasonably well with measured experimental data.
The TOMGRO model for tomatoes, which integrates the Acock model, was used to calculate net crop photosynthesis. The results show that the model is inadequate for describing the CO2 balance of a greenhouse agrosystem. However, it was determined that it can be used in a more complex model to describe tomato growth and development (Zekki et al., 1999).
There are other models for tomatoes under greenhouse conditions. One of them is TOMPOUSSE, which predicts production of tomato crops (Abreu and Meneses, 2000). Moreover, Dai et al. (2006) developed a relatively simple model for prediction of biomass production of the canopy as well as for harvested fruits for three greenhouse crops, including tomatoes. The results show that the model satisfactorily predicts canopy biomass and fruit harvest for the three crops. Furthermore, Dimokas et al. (2008) proposed a new model modified from the original TOMGRO model. The model was evaluated and calibrated in greenhouse tomato and a good relation between measured and simulated data were found for crop development and for biomass and fruit production. This experiment was conducted in Mediterranean conditions in eastern Greece.
Optimal control in greenhouses
Optimal control methods allow obtaining trajectories of environmental conditions inside the greenhouse, which would lead to achieving previously established production goals. These methods are based on a dynamic model that describes the desired crop behavior and establishes an optimization criterion (Bryson and Ho, 1975; Lewis, 1986). For this reason, development of optimal controls in greenhouses is a topic that recently has been very actively studied. Below, we give a brief description of these studies, which are alternatives to the method we propose.
The work of Boaventura Cunha et al. (1997) and Coelho et al. (2005) present a general technique of predictive control to regulate greenhouse environmental conditions. This technique predicts future states of the system when an optimal control trajectory is obtained at a fixed time horizon and recalculated for each time horizon. Tap et al. (1996, 1997) propose an algorithm of optimal control that is applied at certain time horizons called RHOC (Receding Horizon Optimal Control) and evaluated during the reproductive stages of tomato production. The objective of our study was to obtain the suboptimal temperature trajectory required to maximize production of tomato (Solanum lycopersicum L.) fruit weight (W F ) and harvested fruit (W F ) using the Monte Carlo method. The hypothesis was that, by using numerical simulations, it is possible to determine the suboptimal temperature trajectory on which the greenhouse should be maintained for a period of 120 dat in order to increase tomato production.
Materials and Methods
Dynamic tomato model under greenhouse conditions
Types of mathematical models are empirical, explanatory and teleonomic. It is the explanatory type that is of interest to our study. Explanatory models are defined through a set of ordinary differential equations that describe the behavior of the system state variables, that is, those variables that represent the relevant properties or attributes of the system under consideration (López-Cruz et al., 2005).
The mathematical model used in our study was proposed by Tap et al. (1996) and consists of six dynamic equations and, consequently, six state variables, which are described here:
 (1)
(1)
B[gm-2] represents the accumulation of assimilates of dry matter per unit of plant area. That is, the metabolic resources that allow the plant to carry out all of its biological processes. W F [gm-2] and W L [gm-2] are dry weight of fruit and leaves still on the plant. D p [adimensional] is a parameter that indicates the stage of plant development on a zero to one scale, while W HF [gm-2] and W HL [gm-2] represent, respectively, harvested fruits and leaves, that is, those that were detached from the plant.
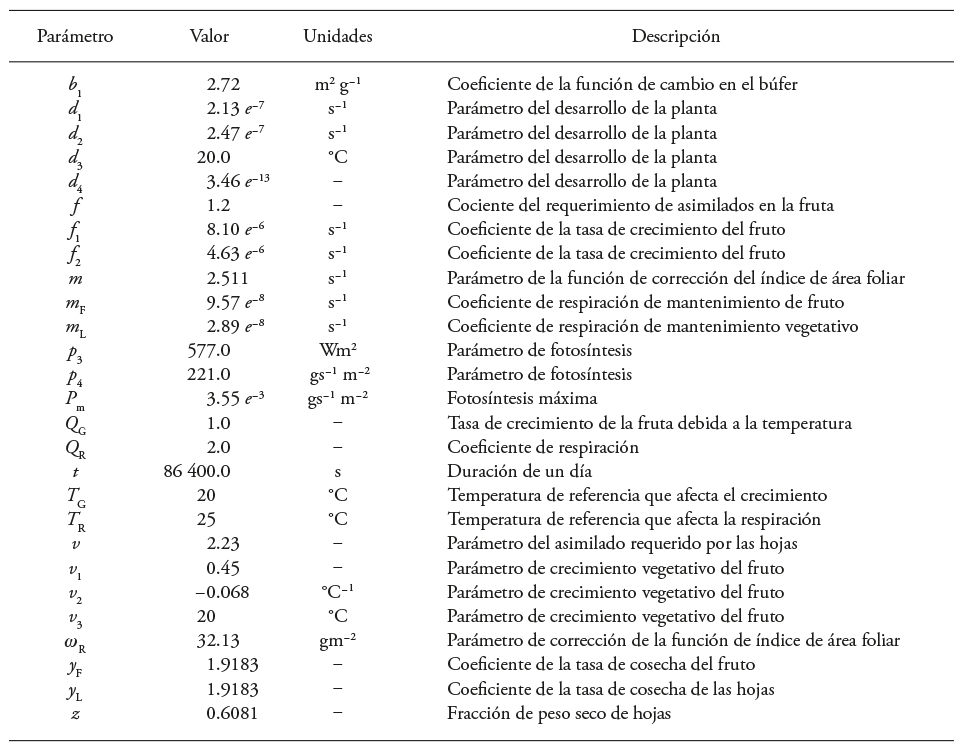
The model described by Tap et al. (1996) was evaluated by Juárez-Maldonado et al. (2012) in two tomato crop cycles in a chapel-type greenhouse covered with polycarbonate for two climatic conditions in Saltillo, Coahuila, Mexico (25°25’36” N, 100°59’44” O). Because of the model’s evaluation and calibration process, its parameters (Juárez-Maldonado et al. (2012) were different from those of Tap et al. (1996). The modified parameters in our study (Table 1) were used in the dynamic model (1) with which the problem of greenhouse tomato production maximization was determined and solved by manipulating the temperature.
Dynamic optimization
The dynamic system to be studied is the following:
 (2)
(2)
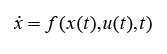
where x(t) ϵ R n is the state, f(x(t), u(t), t) represents a vector of non-linear functions described in system (1), that is, all the functions in vector form on the right of the equation, and u(t) ϵ R m is the vector of control inputs, which are delimited as follows:
 (3)
(3)
where α i (t), β i (t) are known functions. Moreover, we have the vector of initial conditions defined as
 (4)
(4)
The interval of interest is [0, t f ] , where t f is the final defined time. The problem consists of finding the entries for the control u(t) in an interval of time [0, t f ] that would lead the system to the trajectory x(t), t ϵ [0, t f ] so that a function or variable is maximized in the entire time interval from [0, t f ]. In our case, this function is known as the cost function and is given in the following form:
 (5)
(5)
where L is the Lagrangian of the system that contains its dynamic evolution expressed in equation (1) (Van Straten et al., 2011) and φ(x(t f ), t f ) is a final condition that can be imposed on the system.
In this study, the dynamic greenhouse tomato growth model developed by Tap et al. (1996) was the basis for calculating a suboptimal temperature trajectory that would maximize fruit (W F ) and harvested fruit (W HF ) production of greenhouse tomatoes. To solve this problem, the Monte Carlo random solution method was selected. This method establishes a temperature range and aims to determine the configuration that guarantees a maximum value for tomato fruit (W F ) and harvested tomato fruit (W HF ) weight. Temperature was selected as the parameter to calculate because of its greater effect on plant development and growth and because it is one of the factors in which many resources are invested for its control. The Monte Carlo method was selected also because it is possible to obtain approximations of results without knowing the system’s behavior since it is necessary only to give value entries and determine which value has the greatest probability of occurring and generating the desired system behavior.
The first step is to determine the trajectory of the control entries u(t) that the greenhouse should maintain during a period of 0 to 120 dat and during tomato development to increase production, using numerical simulations of model (1) with the parameters of Table 1 and application of the Monte Carlo method. The assumption is that by using numerical simulations, it is possible to determine the suboptimal trajectory of the control entries u(t) that would increase tomato production. To achieve this, maximizing fruit weight (W F )and harvested fruit weight (W HF )are posed considering two cost functions, which are described below:
In the first, only maximum growth of the variable W F was considered in a time interval of [0,120] dat and manipulating the control inputs u(t), that is:
 (6)
(6)
subject to the following restrictions: u min ≤u(t) ≤u max and that the dynamic equations of system (1) are satisfied.
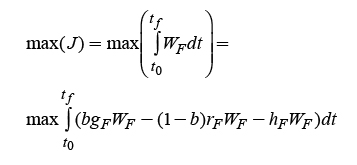
In the second, maximization of both fruit weight (W F ) and harvested fruit weight (W HF ) were considered. In this way, from the initial time up to harvest time, 0 to 58 days after transplant, the goal was only to maximize productivity of W F , and finally, from harvest (59 dat) up to the final growth period (120 dat) W HF was increased; that is,
 (7)
(7)
Likewise, subjected to the restrictions of the previous case, the goal was not to obtain a maximum value of only W HF from the beginning of the simulation since this variable remains constant with a value of zero until the harvest stage is reached. To achieve this objective, one or several inputs of the dynamic system (1) must be selected, such as temperature, PAR radiation, or CO2 concentration.
Temperature is one of the main climatic factors that affect development stages and physiological processes of the plant. This can be seen in the dynamic model (4) as T g , which is one of its inputs. Satisfactory development of the phases of germination, vegetative growth, flowering, fruit set and fruit ripening depend on the temperatures inside the greenhouse at each growth stage. Moreover, because tomato is a plant that is sensitive to extreme temperature and/or changes in relative humidity, it is necessary to maintain it within an optimum temperature range so that it can achieve its maximum development. Also, it should be added that tomato is a thermoperiodic plant, which means that its growth is favored by temperature that varies with the stage of plant development, as can be seen in Table 2 (Jaramillo-Noreña et al., 2013; Wallach et al., 2006).
Table 2 Minimum, maximum and optimal temperatures for plant development stages reported by Jaramillo-Noreña et al. (2013) and Wallach et al. (2006).
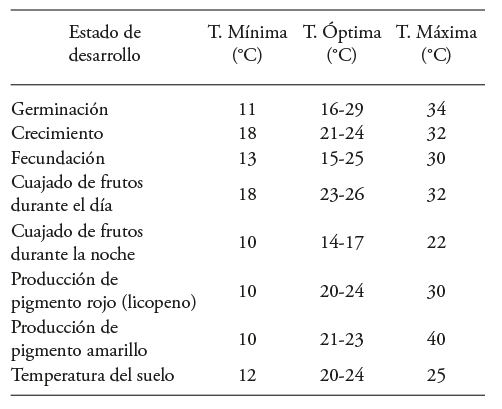
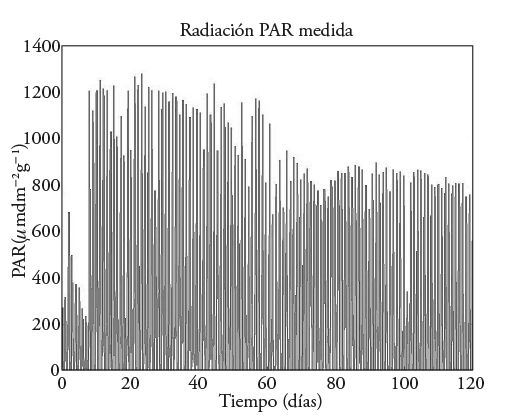
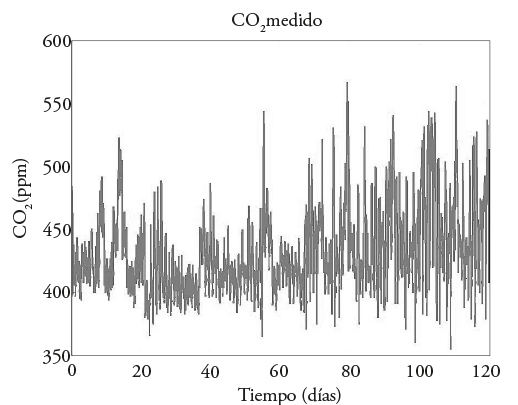
Thus, to achieve the objective of maximizing production based on dynamic model (4), temperature is selected as the control input (Table 2) to obtain, first, a temperature trajectory that maximizes the quantity of fruit on the plant during the period of 120 dat. Another temperature trajectory is then chosen to maximize the quantity of fruit in the first 58 dat and harvested fruit from day 59 to 120 dat. It is important to clarify two points. First, despite the existence of another two inputs in dynamic model (1), which correspond to PAR (I) radiation and CO2 concentration, these were not determined in our study; rather, we used those reported by Juárez Maldonado et al., 2012 (Figures 8 and 9). Second, to obtain a feasible temperature trajectory in maximizing tomato production, in either of the two problems posed here, it is necessary to have a restriction on temperature, which is the manipulated input. For this reason and considering the studies of Pérez et al. (2002), Jaramillo-Noreña et al. (2013) and Wallach et al. (2006), a temperature restriction interval of 15 °C≤T g ≤30 °C was chosen. This range was selected since it is the mean temperature range during the day in the city of Saltillo.
The problem of maximizing fruit is formulated with the system of differential equations (1), which describes the growth dynamics of cultivated tomato plants. Considering the control input u=T g , which is restricted to the range of 15 °C≤u≤30 °C, that is, u [15;30] and considering the vector of states, x(t)=[B, W F , W L , D p , W HF , W HL ] , with the initial crop conditions of x(0)=[0; 0,42; 43,59; 0; 0; 3,95] obtained by Juárez-Maldonado et al. (2014), it is necessary to find the temperature trajectory that generates a higher quantity of fruit (W F ) and of harvested fruit (W HF ) in the final growth period t f = 120 days. It is important to mention that each time interval in which a temperature is calculated is 15 min during the 120 d of simulation.
The Monte Carlo Method
The Monte Carlo method consists of generating random numbers on the basis of a given probability distribution. In this way, configurations, or inputs, accessible for the system are explored to later take those of greater probability based on selected criteria.
The algorithm based on the Monte Carlo Method (Peña Sánchez de Rivera, 2001) used to obtain the temperature trajectory is the following:
Establish the temperature range or interval to which the system will be subjected.
Fix the number of iterations or steps for exploring the temperature range.
From the values corresponding to temperature, we take one at random; this temperature we will call T 1 and we integrate the dynamic system (1) using an explicit method of Runge-Kutta of 4th and 5th order combined with the method of Dormand and Prince, (1980) to improve approximation of the solution by adapting the integration step, which MATLABR11contains and is called ode45 (MathWorks, 2017).
Again we take a temperature at random in the established range, T 2, and we integrate the dynamic system (1).
If temperature T 2 generates a higher value of the variable we are interested in maximizing, we add T 2 to the database of suboptimal temperatures for the system.
In the opposite case, the difference between the variables to be maximized is calculated as: x=x 2=x 1. Where x 1 and x 2 correspond to the variables obtained with T 1 and T 2, respectively. In our case, as we mentioned above, the variables to be maximized are fruit weight W F and harvested fruit weight W HF .
We generate a random number r between 0 and 1.
If r>e -x , we keep temperature T 1, since the difference, x=x 2=x 1 between the variables to be optimized is very low in this temperature interval.
Repeat steps 3 to 9 until completing the established iterations.
One step of Monte Carlo is considered completed when the entire process described above has been carried out. The suboptimal temperature trajectory is obtained by calculating the averages of T
g
in the iterations done to graph them against the established time intervals using the equation of the mean,
Because it is random and not based on the conditions of first and second order optimality (Bryson and Ho, 1975; Lewis, 1986), the Monte Carlo method must be evaluated by changing the number of iterations. It is known that, by increasing the number of iterations, the method can better approximate its solution. Therefore, it depends on the finalization criterion when determining the maximum error to be admitted. For this reason, to solve the previous problem, two simulations are carried out: one with 500 thousand and the second with 1 million iterations with the Monte Carlo method for the two cases of maximizing the variables fruit weight (W F ) and harvested fruit weight (W HF ), considering that the temperature limits are between 15 and 30 °C.
Results and Discussion
The temperature trajectories, which ware considered suboptimal under the criterion that the Monte Carlo method does not assure optimal solutions. Also presented are the variables that are maximized and were obtained for the two cases discussed previously. They are: 1) only maximization of the W F growth variable is contemplated in a tme interval of 0 to 120 dat and 2) maximization of both fruit weight (W F ) from 0 to 58 dat and harvested fruit weight (W HF ) from 59 to 120 dat are considered.
First case: maximization of W F
The suboptimal temperature trajectories obtained after day 59 for the first case of only W F maximization, which corresponds to 1 million iterations, indicates that temperature stabilizes around 15 °C, the lower limit of the imposed restriction, unlike what occurs at 500 thousand iterations where no stabilization is observed. Moreover, it can be observed that the suboptimal temperature trajectory shows periods that emulate day and night around this same restriction interval (Figure 1).
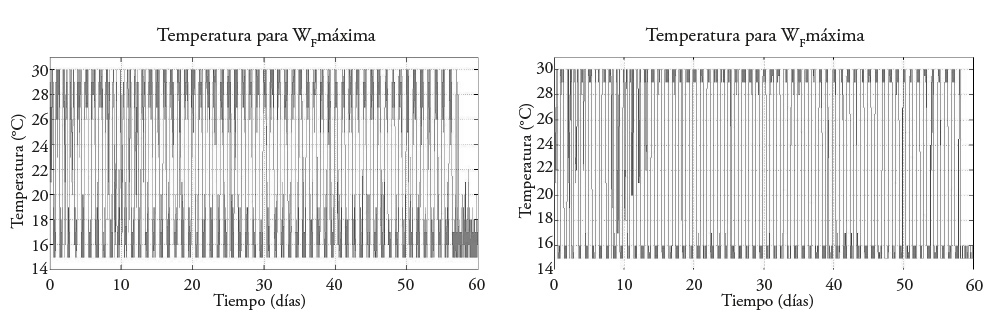
Figure 1 Suboptimal temperature trajectories when maximizing W F . obtained with 500 thousand iterations (left) and with 1 million iterations (right).
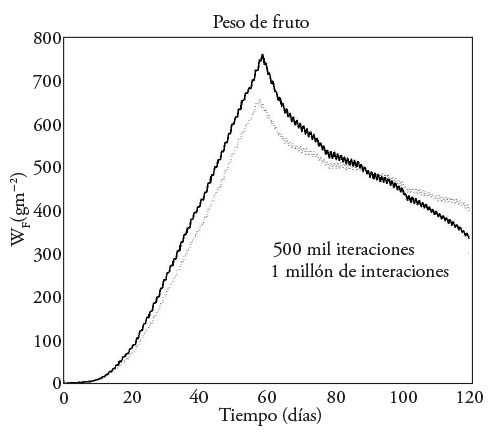
Maximized fruit weight (W F ) with the suboptimal temperature trajectory (Figure 1), for 500 thousand and 1 million iterations, reveals that the increase in the number of iterations has an impact on obtaining maximized fruit weight and that, for 500 thousand iterations, around 650 [gm-2] W F is obtained, while for the case of 1 million iterations, 750 [gm-2] W F is obtained (Figure 2).
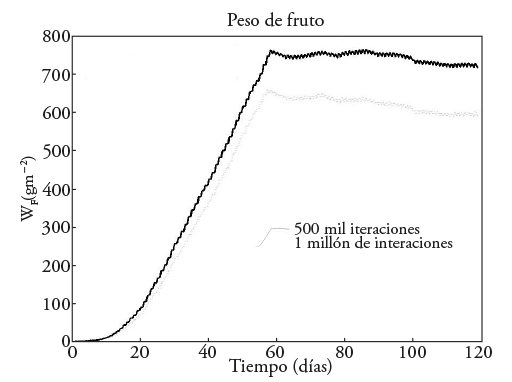
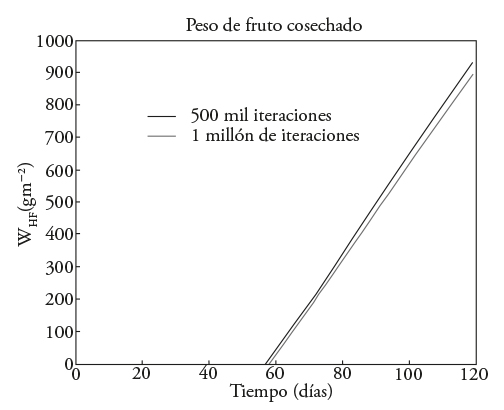
The results of harvested fruit (W HF ), when only fruit weight (W F ) is maximized considering 500 thousand and 1 million iterations, indicate that the curve begins to increase around day 59, which is when fruit harvest initiates. Harvested fruit weight (W HF ) reaches an approximate value of 900 [gm−2] for both 500 thousand iterations and for 1 million iterations (Figure 3).
Second case: maximization of W F and W HF
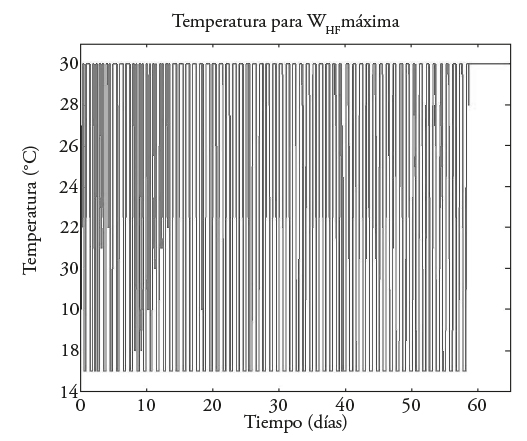
The suboptimal temperature trajectory obtained for combined maximization of W F and W HF , shows a periodicity similar to that when only fruit weight W F is maximized. However, as of day 59, approximately, corresponding to the harvest stage, maximization indicates that temperature should be maintained at around the upper limit of temperature restriction of 30 °C (Figure 4).
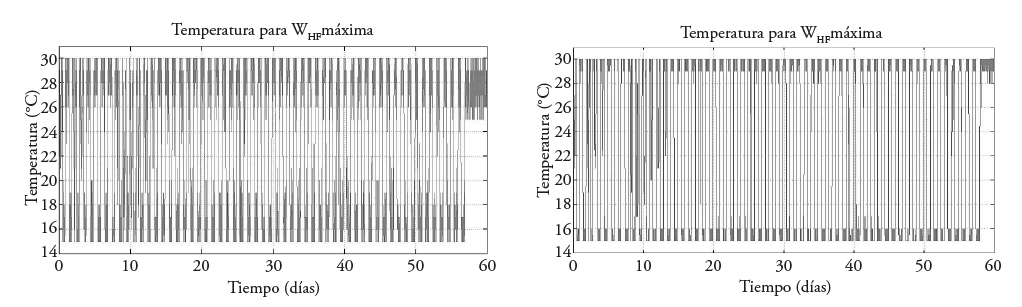
Figura 4 Trayectorias de temperatura subóptima para WF y WHF. Obtenida con 500 mil iteraciones (izquierda) y con 1 millón de iteraciones (derecha).
The results of fruit weight (W F ) indicate values similar to the first case in the period of 0-59 d, 650 [gm-2] and 750 [gm-2] W F for 500 thousand and 1 million iterations, respectively. However, as of day 59, both simulations of fruit weight (W F ) decrease since in this case only harvested fruit weight is maximized (W HF ) (Figure 5).
Harvested fruit weight (WHF) increases considerably, relative to the case in which only fruit weight (W F) is maximized; that is approximately 1300 [gm-2] and 1450 [gm-2] are obtained for 500 thousand and one million iterations, respectively, contrasting with the 900 [gm-2] obtained previously (Figure 3).
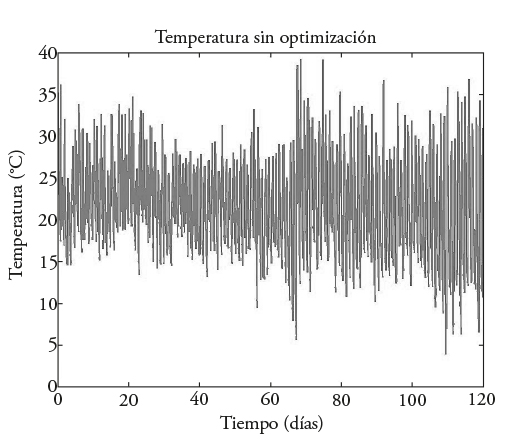
Results of the simulation without the optimization reported by Juárez-Maldonado et al., (2012)
The results of fruit weight and of harvested fruit weight reported by Juárez-Maldonado et al. (2012), reproduced by simulation and presented here (Figure 7), maximize neither WF nor W HF. Only the trajectories of temperature, CO2 and PAR radiation, measured during the 120 dat in the greenhouse were considered (Figures 8-10). These results show an increase in fruit weight (W F ) of 600 [gm-2] without maximization to 750 [gm-2] when maximizing only W F with 1 million iterations (Figure 2). In comparison, when harvested fruit weight (W HF ) is maximized, as of day 59 there is an increase of 800 [gm-2] without maximizing to 1450 [gm-2] (Figures 7 and 6). The temperatures recorded in the study of Juárez-Maldonado et al. (2012), without optimization (Figure 8), compared with the suboptimal trajectories reported in Figures 2 and 4, change greatly. A production cost analysis to compare crop development without control and with temperature trajectory suboptimization is necessary before deciding whether its application is possible.
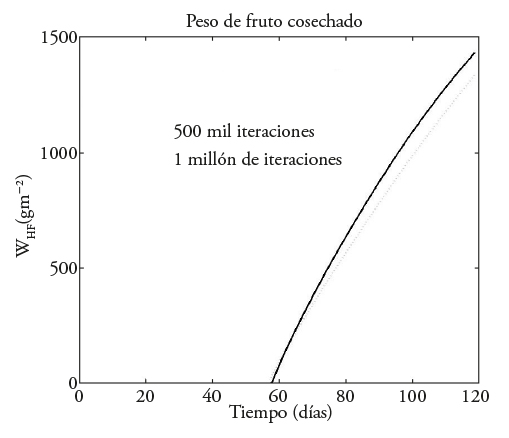
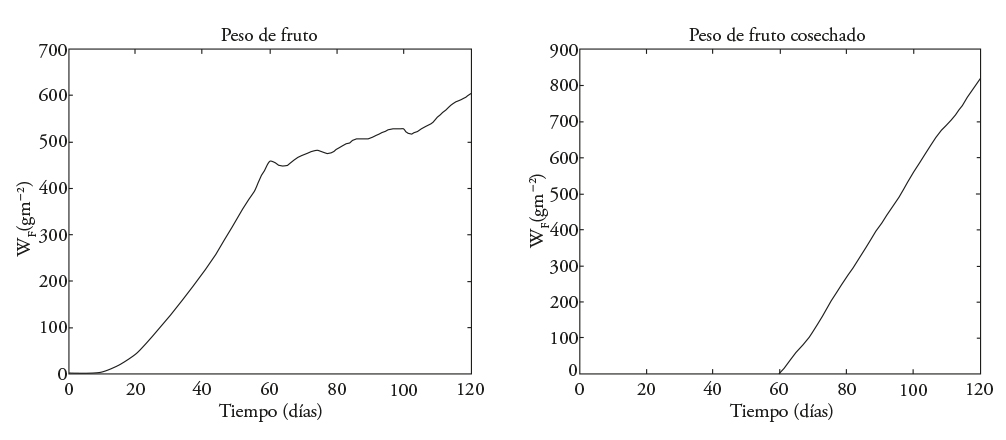
Figure 7 Fruit weight (left) and harvested fruit (right) reported by Juárez-Maldonado et al. (2012).
The results revealed two important characteristics. The first is approximation of the solution when the number of iterations of the Monte Carlo method is increased from 500 thousand to 1 million. Considering this variation in iterations, less oscillation is observed in the graphs (Figures 1 and 4) with a larger number of iterations. This is expected since, as steps increase, the system tends to convergence of the solution to the problem (Peña Sánchez de Rivera, 2001). The second is the behavior of the temperature trajectory for maximization of only fruit weight (W
F
), for W
F
maximization between days 0 and 58 and for harvested fruit weight (W
HF
) from day 58 to the end of the period (120 d). From day 59, which marks the beginning of harvest, the suboptimal temperature trajectory stabilizes around 15 °C for maximization of W
F
(Figure 1) and around 30 °C for maximization of W
F
and W
HF
(Figura 4). The latter behavior can be explained by the dynamics of W
F
and W
HF
(eq. 4):
Optimal temperature
To obtain the optimal temperature trajectory, the Monte Carlo method with 1 million iterations was compared with application of optimal control using MATLABR11 (MathWorks, 2017) with the non-linear optimization tool and DYNOPT software based on the study of Logsdon and Biegler (1989), and an optimal control trajectory was determined given a dynamic model of a process, which is subject to restrictions of equality and inequality. Because of limited space, we show only the optimal temperature trajectory in the case of W F and W HF maximization (Figure 11), which is similar to that shown in Figure 4. The difference is due to the random nature of the Monte Carlo method in which temperature tends to oscillate around the mean, or expected, value, and this oscillation is directly related to the number of simulation steps, while in the non-linear optimization method, these oscillations do not exist.
Conclusions
It is possible to develop numerical simulations based on a model for maximizing fruit weight (W F , gm-2) and harvested fruit weight (W HF , gm-2) of tomatoes cultivated in a greenhouse with the Monte Carlo method to obtain suboptimal temperature trajectories, since the Monte Carlo method does not comply with the first and second order optimality conditions. The results of simulation show that, when temperature is controlled, tomato crop productivity can be increased. This permits proposing conditions for maximizing either fruit on the plant or harvested fruit, but not both at the same time.
The suboptimal temperature trajectory obtained with 1 million iterations can be used to obtain a softer curve that generates more stable and practical cycle, which can be fed into a control system that varies greenhouse temperature in a more stable way and be put into practice to validate the theoretical hypothesis presented here in an experimental system.
Literatura Citada
Abreu, P., and J. F. Meneses. 2000. TOMPOUSSE, a model of yield prediction for tomato crops: calibration study for unheated plastic greenhouses. Acta Hort. 519: 141-149. [ Links ]
Boaventura Cunha, J., C. Couto, and A. E. Ruano. 1997. Real-time parameter estimation of dynamic temperature models for greenhouse environmental control. Ctrl. Eng. Prac. 5: 1473-1481. [ Links ]
Bouman, M., M. Wopereis, and J. Riethoven. 1994. The Use of Crop Growth Models in Agroecological Zonation of Rice. DLO-Research Institute for Agroecology and Soil Fertility, Wageningen, Department of Theoretical Production Ecology, Wageningen and International Rices Research Institute, 134 p. [ Links ]
Bryson Jr., A. E., and Y. C. Ho. 1975. Applied Optimal Control. New York: Hemisphere. pp: 42-65. [ Links ]
Castilla-Prados, N. 1995. Manejo del cultivo intensivo con suelo. In: Nuez, F. El Cultivo del Tomate. Editorial Mundi-Prensa, Madrid, pp: 189-225. [ Links ]
Coelho, J. P., P. B. Moura Oliveira, and J. Boaventura Cunha. 2005. Greenhouse air temperature predictive control using the particle swarm optimisation algorithm. Comp. Electro. Agric. 49: 330-344 [ Links ]
Dai, J., W. Luo, Y. Li, C. Yuan, Y. Chen, and J. Ni. 2006. A simple model for prediction of biomass production and yield of three greenhouse crops. Acta Hort . 718: 81-88. [ Links ]
Dimokas, G., C. Kittas, and M. Tchamitchian. 2008. Validation of a tomato crop simulator for mediterranean greenhouses. Acta Hort . 797: 247- 252. [ Links ]
Dormand, J. R., and P. J. Prince. 1980. A family of embedded Runge-Kutta formulae. J. Comp. Appl. Mat. 6: 19-26. [ Links ]
Jaramillo-Noreña, J. E., G. D. Sánchez, V. P. Rodríguez, P. Aguilar, L. F. Gil, J. Hío, L. M. Pinzón, M. C. García, D. Quevedo, M. A. Zapata, J. F. Restrepo, y M. Guzmán. 2013. Tecnología para el Cultivo de Tomate bajo Condiciones Protegidas. Corporación Colombiana de Investigación Agropecuaria, Corpoica, Bogotá, pp: 142. [ Links ]
Juárez-Maldonado, A., K. De Alba-Romenus, y A. Benavides-Mendoza. 2012. Calibración y validación de un modelo de crecimiento de tomate bajo condiciones de invernadero. Congreso Internacional de Investigación Academia J. Celaya 4: 1490-1495. [ Links ]
Juárez-Maldonado, A., A. Benavides-Mendoza, K. de Alba-Romenus, and A. Morales-Díaz. 2014. Dynamic modeling of mineral contents in greenhouse tomato crop. Agric. Sci. 5: 114-123. [ Links ]
Heuvelink, E., and L. F. M. Marcelis. 1989. Dry matter distribution in tomato and cucumber. Acta Hort . 260: 149-157. [ Links ]
Kano, A., and C. H. M. Van Bavel. 1988. Design and test of a simulation model of tomato growth and yield in a greenhouse. J. Japan. So. Hort. Sci. 56: 408-416. [ Links ]
Lewis, F. L. 1986. Optimal Control. New York: John Wiley & Sons. pp: 4-14. [ Links ]
Logsdon, J. S., and L. T. Biegler. 1989. Accurate solution of differential-algebraic optimization problems, Chem. Eng. Sci. 28:1628-1639. [ Links ]
López-Cruz, I., A. Ramírez-Arias, y A. Rojano-Aguilar. 2005. Modelos matemáticos de hortalizas en invernadero: trascendiendo la contemplación de a dinámica de cultivos. Rev. Chapingo Serie Hort. 11: 257-267. [ Links ]
MathWorks. 2017. https://www.mathworks.com/help/simulink/gui/solver.html?searchHighlight=Dormand&s_tid=doc_srchtitle (Consulta: enero 2017) [ Links ]
Mehdizadeh, M., E. I. Darbandi, H. Naseri-Rad, and H. Tobeh. 2013. Growth and yield of tomato (Lycopersicon esculentum Mill.) as influenced by different organic fertilizers. Int. J. Agron. Plant Prod. 4: 734-738. [ Links ]
MEXICOPRODUCE. 2012. Productos: Jitomate. http://www.mexicoproduce.mx/productos.html#jitomate (Consulta: enero 2017) [ Links ]
Peña Sanchez de Rivera, D. 2001. Deducción de distribuciones: el método de Monte Carlo. In: Peña Sanchez de Rivera, D. Fundamentos de Estadística. Alianza Editorial, Madrid. pp: 220-300. [ Links ]
Pérez, J., G. Hurtado, V. Aparicio, Q. Argueta, y M. Larín. 2002. Guía Técnica: Cultivo de Tomate. Centro Nacional de Tecnología Agropecuaria y Forestal. Ciudad Arce, La Libertad. pp: 1-48. [ Links ]
SAGARPA. 2012. Agricultura protegida. http://2006-2012.sagarpa.gob.mx/agricultura/Paginas/Agricultura-Protegida2012.aspx (Consulta: febrero 2017) [ Links ]
Tap, R.F., L.G.Van Willigenburg, and G. Van Straten. 1996. Experimental results of receding horizon optimal control of greenhouse. Acta Hort . 406: 229-238. [ Links ]
Tap, R. F ., G. Van Straten, and L. Willigenburg. 1997. Comparison of classical and optimal control of greenhouse tomato crop production. Proc. 3rd Int. IFAC Workshop Mathematical and Control Applications in Agriculture and Horticulture. Hannover, Germany. [ Links ]
Van Straten, G., G. Van Willigenburg, E. Van Henten, and R. Van Ooteghem. 2011. Optimal Controlof Greenhouse Cultivation. First Edition. CRC Press Taylor and Francis Group, Boca Raton, FL. pp: 25-38. [ Links ]
Wallach, D., D. Makowski, and J. Jones. 2006. Working with Dynamic Crop Models: Evaluation, Analysis, Parameterization and Applications. Elsevier B. V., Amsterdam. pp: 441. [ Links ]
Zekki, H., C. Gary, A. Gosselin, and L. Gauthier. 1999. Validation of a photosynthesis model through the use of the CO2 balance of a greenhouse tomato canopy. Ann. Bot. 84: 591-598. [ Links ]
Received: June 2016; Accepted: March 2017
 Este es un artículo publicado en acceso abierto bajo una licencia Creative Commons
Este es un artículo publicado en acceso abierto bajo una licencia Creative Commons
