










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkAgrociencia
versión On-line ISSN 2521-9766versión impresa ISSN 1405-3195
Agrociencia vol.49 no.1 Texcoco ene./feb. 2015
Maquinaria agrícola
Zonas de trabajo del conjunto del tractor agrícola con implemento en los esquemas de tracción 4x2 y 4x4
Work zones of an agricultural tractor with attachment in 4x2 and 4x4 traction schemes
Eugenio Romantchik-Kriuchkova*, Álvaro Morelos-Moreno, C. Alberto Villaseñor-Pereá, Luciano Pérez-Sobrevilla
Posgrado en Ingeniería Agrícola y Uso Integral del Agua. Universidad Autónoma Chapingo. 56230. Chapingo. Estado de México. * Autor responsable (eugenio.romantchik@gmail.com).
Recibido: febrero, 2014.
Aprobado: diciembre, 2014.
Resumen
El objetivo del presente estudio fue identificar las zonas de trabajo del conjunto tractor agrícola con implemento (caso de un tractor Massey Ferguson 592T, con una rastra de discos de tiro axial) para los esquemas de tracción 4x2 y 4x4, posiciones de la caja de cambio de velocidades 1a, 2a y 3a y profundidades de trabajo de 5, 10 y 15 cm, en un suelo agrícola. Las fronteras de conexión/desconexión de la tracción delantera que dividen las zonas de trabajo fueron determinadas a partir del análisis de los diferentes índices de trabajo en cada posición de la transmisión y de profundidad. El tractor se instrumentó con una rueda de referencia, tres sensores de rotación de las ruedas, una celda de carga en la barra de tiro, un flujómetro de combustible y un sistema de adquisición de datos desarrollado en LabView. Con los parámetros medidos se calcularon los patinajes, la velocidad del tractor, la potencia de tracción, la productividad y el consumo específico de combustible, en función de la carga aplicada. Los límites de los índices se determinaron para cuando es más efectivo trabajar con el esquema 4x4 o 4x2. La conexión y desconexión oportunas de la tracción delantera, aumentan la productividad hasta 31 % y ahorran combustible hasta 16 % en diferentes regímenes de trabajo.
Palabras clave: Índices de trabajo, zonas de trabajo, fronteras de desconexión.
Abstract
The objective of this study was to identify the work zones of an agricultural tractor with attachment (the case of a Massey Ferguson 592T tractor, with an axial draw disk harrow) for the traction schemes 4x2 and 4x4, gear positions 1st, 2nd, and 3rd and working depths of 5, 10 and 15 cm in agricultural soil. Front traction engagement/disengagement borderlines that divide the work zones were determined through analysis of the different work indexes at each gear position and each depth. The tractor was equipped with a reference wheel, three wheel rotation sensors, a loadcell in the drawbar, a fuel flow meter and a data gathering system developed in LabView. With the measured parameters, slippage, tractor speed, traction power, productivity and specific fuel consumption were calculated in function of the applied load. Index limits were defined to determine when it is more effective to work with the 4x4 or 4x2 scheme. Timely engagement and disengagement of the front traction increases productivity up to 31 % and fuel savings of up to 16 % in different work regimes.
Key words: Work indexes, work zones, disengagement threshold.
INTRODUCCIÓN
El desempeño del tractor 4x4 o 4x2 es resultado de las propiedades del suelo, de los parámetros de un implemento así como de la operación del tractor, su velocidad y la conexión o desconexión oportuna de los medios de tracción: diferenciales y las ruedas motrices, y se evalúa con los índices de gastos de combustible, patinaje y productividad (Pérez, 2006a; 2006b). Todos estos índices dependen considerablemente de la potencia total aplicada a la caja de transferencia entre los ejes y a los diferenciales entre las ruedas motrices, y como ésta es distribuida a cada rueda para transformarse a la fuerza de tracción (Vantsevich, 2007; Andreev et al., 2010). Las evaluaciones de los agregados agrícolas se realizan en campo bajo condiciones de trabajo real y proporcionan información acerca de los indicadores de la calidad del trabajo, índices y parámetros del desempeño y funcionamiento técnico, así como los índices técnico-económicos (Gaytán et al., 2005).
La ventaja esencial del esquema de tracción 4x4 es el incremento de hasta 35 % de la fuerza de tracción, debido a que utiliza su peso total y los patinajes disminuyen, comparado con el esquema de tracción 4x2, donde solo se usa la carga dinámica del eje trasero (ASABE EP496.3, 2006). El valor de economía del combustible muestra un máximo con el menor patinaje de las ruedas, (Zoz et al., 2002). Por esto es necesario determinar el comportamiento de estos factores en pruebas de tractores.
Gaytán et al. (2005), Romantchik et al. (2009), Mayans et al. (2009) and Mayans et al. (2010) investigaron el trabajo del conjunto agrícola de los tractores con diferentes máquinas en el esquemas 4x4 y 4x2 separado y con máxima potencia, pero no compararon los índices para los dos esquemas de tracción de un tractor. Kolator y Bialobrzewski (2011) desarrollaron un modelo para simular el desempeño de un tractor 4x2 con un cultivador acoplado en el enganche de tres puntos en diferentes tipos de suelo. Los indicadores estimados fueron la eficiencia del tractor, la eficiencia de tracción, el consumo específico de combustible y la productividad, y encontraron que la eficiencia del tractor varía significativamente a los cambios de la fuerza de tracción de 0 a 7 kN para diferentes posiciones de la transmisión.
En condiciones de campo, Gaytán et al. (2005) evaluaron cuatro agregados agrícolas combinando dos tractores 4x2 con tracción en las ruedas traseras: New Holland 6610 4x4 y John Deere 5715T 4x4 con multiarado y una rastra de tiro, comparando los índices y parámetros técnicos, agrotécnicos y económicos, en las posiciones de la caja de cambios correspondientes a patinajes entre 15 y 20 %. Pérez (2006a, 2006b) evaluó el comportamiento de la tracción de un tractor 4x2 operando bajo diferentes condiciones de labranza y niveles de carga en la barra de tiro, y encontró que los valores más altos de fuerza de tracción y de patinaje y la menor eficiencia de tracción del tractor se obtuvieron en los suelos intensivamente labrados (con cuatro y cinco pasadas de rastra), los cuales presentaron los valores más bajos de contenido de humedad, resistencia a la penetración, cobertura de residuos, contenido de materia seca y densidad aparente.
Mayans et al. (2009) y Mayans et al. (2010) determinaron la potencia de tracción y potencia a la toma de fuerza del conjunto formado por un tractor 4x2 y una sembradora y, además, evaluaron los índices de trabajo como el consumo de combustible, patinaje de las ruedas motrices, consumo de combustible y potencia efectiva por metro de ancho de trabajo en función de la fuerza de tracción. La distribución de potencia mecánica entre las ruedas motrices depende también de la discrepancia cinemática entre los ejes motrices, que es resultado de cambio de la carga vertical por la fuerza de tracción, la presión en las ruedas, el movimiento en la curva, etc. (Sahay y Tewari, 2004, Vantsevich, 2008, Morelos et al., 2009). Ahora, en los tractores se emplean diversos tipos de sistemas de transmisión para controlar la distribución de par entre las ruedas de tracción y por lo tanto mejorar el rendimiento de la tracción (Molari et al., 2012; Patterson et al., 2013).
En los tractores agrícolas se ha introducido el mecanismo de desconexión automática del eje delantero para las condiciones de transporte a velocidades altas y al tomar una curva (Wiley y Turner, 2008). Según AGCO (2005), la desconexión de la tracción delantera se debe realizar al alcanzar la velocidad de 20 km h-1, para mejorar la maniobrabilidad y disminuir el desgaste de los neumáticos, pero no indica las condiciones de los índices de trabajo para cambiar la configuración de tracción. IDAE (2005) menciona que la elección del esquema de tracción adecuado permite un ahorro de combustible de 5 a 10 %, pero no da información del comportamiento de los índices de trabajo para seleccionar el esquema de tracción.
Morelos et al. (2009) compararon dos esquemas calculando los patinajes en las ruedas y las fuerzas de tracción en el tractor con tracción en dos ruedas (4x2) y en las cuatro ruedas (4x4) en función del radio de giro y el ángulo de dirección. Ellos reportan que al incrementar el ángulo de dirección, aumenta la fuerza de tracción y el patinaje en la rueda interior para el esquema 4x2 y aumenta en las ruedas traseras para el esquema 4x4; además determinaron las condiciones óptimas para desconectar el eje delantero motriz antes de aparecer el momento de torsión parásito que se carga en el eje central.
Así como la fuerza y la potencia de tracción del tractor presentan valores diferentes en los esquemas de tracción 4x2 y 4x4 (ASABE EP496.3, 2006), los otros índices de trabajo son afectados y también presentan valores diversos en las mismas condiciones de carga aplicada o profundidad de trabajo. Al-Janobi (1997) comparó el desempeño de un tractor agrícola en los modos 4x2 y 4x4 a partir de la fuerza de tracción y eficiencia de tracción, y encontró que los valores máximos de la eficiencia de tracción fueron 47 % para el modo 4x2 y de 70 % para el modo 4x4.
En consecuencia, el objetivo del presente estudio fue evaluar los índices de trabajo de un conjunto agrícola y delimitar las zonas de trabajo de los esquemas de tracción 4x2 y 4x4 del tractor agrícola Massey Ferguson 592T con una rastra de discos de tiro axial, en tres niveles de profundidad y en tres posiciones de la caja de transmisión.
MATERIALES Y MÉTODOS
Condiciones del experimento
El experimento fue realizado en una parcela de 120 x 150 m, ubicada en Chapingo, Estado de México, 19° 29' 31" N y 98° 51' 21" O, a 2326 msnm. Las mediciones de los parámetros se realizaron en una distancia lineal de 30 m, en un suelo agrícola con 64.6 % de arena, 6.8 % de limo y 28.6 % de arcilla, clasificado como textura franco arcillo arenoso. El contenido de humedad fue 9.3 % en el perfil de 0 a 20 cm de profundidad, y los valores de resistencia a la penetración fueron 37.5, 175.9 y más de 500 kPa, a los 5, 10 y 15 cm de profundidad, respectivamente.
En el estudio se usó un tractor Massey Ferguson 592T con potencia a la toma de fuerza de 68.4 kW, un peso estático de 47.8 kN distribuido en los eje delantero y trasero en 35.5 y 64.5 %, respectivamente, y con opción de conexión y desconexión del eje delantero. Se usó una rastra de discos de tiro axial, de 28 cuerpos de 0.6 m de diámetro, repartidos en dos ejes portadiscos con un ancho de trabajo de 2.9 m. La regulación de la profundidad de trabajo de los discos de la rastra se realizó a partir de la posición del seguro que regula la elevación de las ruedas de transporte.
El diseño experimental fue un arreglo factorial 2x3x3 y los factores fueron: dos esquema 4x2 y 4x4, tres posiciones de la caja de velocidad 1a, 2a, 3a (V1, V2, V3) y tres profundidad de trabajo (5, 10 y 15 cm), con 3 repeticiones cada uno. Los datos fueron analizados estadísticamente con la prueba de Tukey (p≤0.05).
Instrumentación
Una quinta rueda fue construida con una rueda neumática (0.42 m diámetro) para determinar la velocidad real de trabajo y se usaron tres sensores de rotación marca Autonics E50S8 de 100 pulsos por revolución para cuantificar las revoluciones de la quinta rueda y de las ruedas traseras del tractor. Los valores de fuerza de tracción fueron determinados con una celda de carga de 50 kN marca Sensortronics, tipo S, Modelo 60001 instalada entre la barra de tiro del tractor y el enganche de la rastra. La ecuación de calibración de la fuerza de tracción (F), en kN, en función del voltaje (V), en mV, fue F=25.12 V + 0.25, con un r2=0.99.
Un circuito acondicionador de señales se construyó para sincronizar la cuantificación de los pulsos de los sensores de rotación. Una tarjeta de adquisición de datos NI-Daq 6008 se usó para registrar y enviar los pulsos de las ruedas y las mediciones de la celda de carga a la computadora a partir de un programa de adquisición de datos en tiempo real desarrollado en LabView versión 8.0. El programa de adquisición de datos tuvo dos ventanas, una para la interfaz gráfica para desplegar en tiempo real las mediciones de las revoluciones y otra para los algoritmos de la estructura del programa. Las mediciones de la celda de carga fueron registradas a una frecuencia de 60 pulsos s-1. El programa generó dos archivos, uno con las revoluciones de las ruedas del tractor y de la quinta rueda, y otro con los valores de fuerza de tracción.
Los valores de consumo horario de combustible se determinaron con un flujómetro analógico Omega, serie FLR 1000ST con un rango de caudal 0-30 l h-1 y una precisión de ±1 %, y el tiempo de medición se registró con un cronómetro Seiko con una precisión ±1 s. El flujómetro fue instalado entre el filtro primario de combustible y la bomba de cebado, y la línea de retorno de la bomba de inyección fue conectada en el filtro secundario de combustible, para evitar la medición repetida.
Determinación de los índices de trabajo
Los índices de trabajo evaluados fueron los patinajes de las ruedas traseras, la potencia de tracción, el consumo horario y específico de combustible, y la capacidad de campo teórica en función de la carga aplicada o fuerza de tracción para dos esquemas, tres velocidades y tres profundidades. De acuerdo con OECD (2012) y PAES (2001), los patinajes de las ruedas motrices traseras a partir de las revoluciones de las ruedas sin carga y con carga se calcularon con la ecuación 1:

donde δt es el patinaje de las ruedas traseras del tractor (%), nt' y nt son las revoluciones de las ruedas del tractor sin y con carga, respectivamente.
Al considerar en la ecuación (1) la relación entre los radios de las ruedas del tractor sin carga, con carga y de la quinta rueda (rt', rt y r5), en m, las revoluciones de las ruedas, incluyendo la quita rue da (nS), en s-1, y que el encoder del sensor de revoluciones da 100 pulsos s- 1, el patinaje se calculó con la ecuación 2:

donde pt y ps son los pulsos de las ruedas traseras del tractor con carga y de la quinta rueda (adim).
La velocidad de trabajo se calculó a partir de las revoluciones y radio de P quinta rueda con la ecuación 3:

donde v es la velocidad de trabajo (km h-1), t es el tiempo de medición (s).
La potencia de tracción (P, kW) es el producto de la fuerza de tracción (FT, kN) y la velocidad de sistema tractor-implemento en la dirección de avance, y se calculó con la ecuación 4 (Mayans et al., 2010;Gonzaga do Vale et al., 2011):

Para determinar el consumo horario de combustible se midió el volumen de combustible que consume el motor por unidad de tiempo y se calculó con la ecuación 5 (Mayans et al., 2010; Gonzaga do Vale et al., 2011):

donde Gh es el consumo horario de combustible (L h-1), G es el combustible consumido (L).
El consumo específico de combustible según IDAE (2005) y OECD (2012) es un índice de trabajo usado para medir la eficiencia energética del tractor, se define como la cantidad de combustible consumido en unidades de masa para realizar una unidad de trabajo (kW h-1) y se calculó con la ecuación (6):

donde ge es el consumo específico de combustible (kg kW-1 h-1), ρ es la densidad del combustible (kg L-1).
La capacidad de campo teórica es el trabajo útil que se puede obtener si el sistema tractor- implemento trabajara sin interrupciones en una velocidad de operación dada, usando el ancho de trabajo teórico del implemento (ASABE D497.6, 2009). Este índice de trabajo para la superficie trabajada y el volumen de suelo removido se calculó con la ecuación 7 (Silveira, 2001):

donde Cc es la capacidad de campo teórica (ha h-1), b es el ancho de trabajo de la rastra (m), ε es la eficiencia de la rastra de discos de tiro axial (adim).
Los parámetros y coeficientes utilizados para calcular los índices de trabajo, son los siguientes: rs=0.204 m; rt'=0.75 m; ρ=0.839 kg L-1 (Nebraska OECD, 2005); b=2.9 m; ε=0.8 (ASABE D497.6, 2009).
Determinación de las zonas de trabajo
Después de medir los parámetros de los experimentos (pulsos de las ruedas, fuerza en tiempo real y flujo de combustible), se calcularon y graficaron los índices de trabajo: patinaje, potencia, gastos de combustible horario y específico y capacidad de campo en función de la carga para diferentes velocidades, profundidades de trabajo y para dos esquemas 4x4 y 4x2. En los gráficos, para su claridad, se presentan solo las curvas de 1a y 3a velocidad, pero los datos de la 2a velocidad se tomaron en cuenta en el análisis de los resultados. Para una posición definida de la transmisión existió una fuerza de tracción, en la cual los dos esquemas de tracción presentaron los índices de trabajo iguales (puntos 1 y 3). Trazando una línea por estos puntos (1 y 3) de intersección en las diferentes posiciones de la transmisión (1a y 3a) se obtiene la línea (AB) y su ecuación (tomando en cuenta las coordinadas de los puntos 1 y 3) que define la división entre las zonas de trabajo de los esquemas de tracción 4x2 y 4x4. La zona de trabajo es una región definida en la cual el tractor presenta los mejores índices de trabajo para la misma carga aplicada en su esquema 4x4 o 4x2, lo que se refleja en la reducción del patinaje de las ruedas, de los consumos de combustible, de la potencia de tracción y en el incremento de la productividad.
RESULTADOS Y DISCUSIÓN
Fuerza de tracción
Como la fuerza de tracción es el principal parámetro de comparación de los índices, primero se evaluaron las mediciones de la fuerza de tracción. En la Figura 1 se muestran los cambios de la fuerza de tracción por metro de ancho de trabajo de la rastra de tiro axial en función de la velocidad de trabajo. Los valores de la fuerza de tracción calculados con la ecuación de ASABE (D497.6, 2009) para diferentes velocidades y 5, 10 y 15 cm de profundidad de trabajo.

Con las mediciones en campo de la carga aplicada en función de la velocidad de trabajo, en tres niveles de profundidad de trabajo y en tres posiciones de la transmisión, se ajustó el modelo de ASABE (EP 496.3, 2006) para el valor mínimo del cuadrado medio del error de 0.0492, y se obtuvo la siguiente ecuación: FT = (289,3 + 16.7 υ + 0.001 υ2)*b*h/1000, que puede predecir las fuerzas de tracción en campo con desviaciones de hasta ± 4.79 % en los tres niveles de carga evaluados.
Índices de trabajo
En las Figuras 2, 3, 4 y 5 se muestran los cambios de los valores promedios de los índices de trabajo en los esquemas de tracción 4x2 y 4x4, para la posición en la caja de cambio de velocidades 1a y 3a, evaluados en función de la fuerza de tracción.
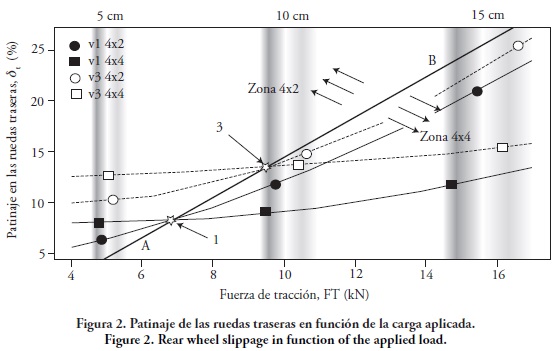



Patinaje
En la Figura 2 se presentan los patinajes de las ruedas traseras del tractor calculados con la ecuación (2). Los patinajes y las fuerzas de tracción son parámetros causa-efecto que aumentan en los dos esquemas de tracción al incrementar la profundidad de trabajo (h). En cargas bajas el patinaje de las ruedas traseras fue mayor en el esquema 4x4 hasta 35 % (para: FT=4kN, V1 y h=5cm δt 4x4 = 8 %, δt 4x2 = 5.2 %).
Al incrementar la carga, el patinaje de las ruedas traseras llegan a ser iguales en los dos esquemas de tracción (puntos 1 y 3), y al aumentar aún más la carga, los patinajes de las ruedas traseras fueron menores hasta 45 % en el esquema 4x4, comparados con el esquema 4x2 (para: FT=16 kN, V1 y h=15 cm δt 4x4 = 13 % y δt 4x2=20 %). La frontera de desconexión de la tracción delantera se definió por la ecuación, δt=1.9 FT-4.5, en la cual el tractor presentó los mismos patinajes de las ruedas en los dos esquemas de tracción para las diferentes posiciones de velocidad (línea AB).
Potencia
En la Figura 3 se presentan los valores de la potencia de tracción del tractor calculados con la ecuación (4). La potencia de tracción dependiente de la velocidad de trabajo y la fuerza de tracción aumentó en los dos esquemas de tracción al incrementar la profundidad de trabajo, pero en mayor grado en el esquema 4x4 debido a las velocidades mayores, comparados con el esquema 4x2.
La frontera de desconexión de la tracción delantera fue definida por la ecuación PT=9.58 * FT-54.23, en la cual el tractor desarrolló la misma potencia de tracción en los dos esquemas de tracción para las diferentes posiciones de velocidad. En este caso, para la carga de 4 kN y la 1a velocidad, la potencia de tracción fue mayor en 26 % en el esquema de tracción 4x4 que en 4x2, y para la carga de 16 kN y la 1a velocidad la potencia de tracción fue mayor en 27 % en el esquema de tracción 4x2.
Consumo de combustible
En la Figura 4 se muestran los valores del consumo horario de combustible del motor del tractor calculados con la ecuación (5). Al aumentar la profundidad de trabajo, la fuerza de tracción y los patinajes, aumentó el gasto de combustible del motor en los dos esquemas de tracción, pero en menor grado en el esquema 4x4 debido a los patinajes menores, comparados con el esquema 4x2.
La frontera de desconexión de la tracción delantera fue definida por la ecuación: Gh=1.75 FT-4.7, en la cual el tractor consumió la misma cantidad de combustible en los dos esquemas de tracción, para las diferentes posiciones de velocidad. En este caso, para la carga de 4 kN y la 1a velocidad, el consumo horario de combustible fue mayor en 14 % en el esquema de tracción 4x4 que en 4x2, y para la carga de 16 kN y la 1a velocidad el consumo de combustible fue mayor en 16 % en el esquema de tracción 4x2. IDAE (2005) reportó un cambio de consumo de combustible que varió de 5 a 10 %.
En la Figura 5 se presentan los valores del consumo específico de combustible del tractor calculados con la ecuación (6), y fue superior a 480 g kW-1 h-1 (rendimiento muy bajo de combustible), lo cual fue atribuido a que el régimen del motor bajó notablemente durante el trabajo en carga en la mayoría de los casos, lo cual concuerda con lo señalado por Pérez (2006b). Al aumentar la profundidad de trabajo el consumo específico de combustible disminuyó en los dos esquemas de tracción, pero en mayor grado en el esquema 4x4 debido a los valores mayores de potencia de tracción, comparados con el esquema 4x2. La frontera de desconexión de la tracción delantera está definida por la línea AB, obtenida con la ecuación ge=-0.26 * FT + 3.13, en la que el tractor presentó la misma eficiencia del combustible en los dos esquemas de tracción, para las diferentes posiciones de velocidad.
En este caso, para la carga de 4 kN y la 1a velocidad el consumo de combustible específico fue mayor en 14 % en el esquema de tracción 4x4 que en 4x2, y para la carga de 16 kN y la 1a velocidad el consumo de combustible fue mayor en 45 % en el esquema de tracción 4x2.
Productividad o capacidad de campo
En la Figura 6 se muestran los valores de la capacidad de campo teórica del sistema tractor-implemento calculados con la ecuación (7). Al aumentar la carga y disminuir la velocidad de trabajo, la productividad disminuyó en los dos esquemas de tracción, pero dicha reducción fue menor en el esquema 4x4 debido a las velocidades incrementadas, en comparación al esquema 4x2. La frontera de desconexión de la tracción delantera fue definida por la ecuación Cc=1.9 FT - 13.9, en la cual el tractor presenta la misma productividad en los dos esquemas de tracción para las diferentes posiciones de velocidad.

En este caso, para la carga de 4 kN y la 1a velocidad la capacidad de campo teórica fue mayor en 8 % en el esquema de tracción 4x4 que en 4x2, y para la carga de 16 kN y la 1a velocidad la capacidad de campo teórica fue mayor en 31 % en el esquema de tracción 4x4.
Zonas de trabajo
En la Figura 7 se muestran las fronteras de desconexión de la tracción de las ruedas delanteras para los diferentes índices de trabajo en función de la carga aplicada, los que dividieron las zonas de trabajo del tractor en los esquemas de tracción 4x2 y 4x4. También se observó que entre 6.5 y 9.0 kN de carga y entre 6 y 11 cm de profundidad de trabajo, el tractor presentó índices de trabajo similares en los dos esquemas de tracción, excepto para los patinajes, cuyo rango se amplío hasta 15 kN de carga y 14 cm de profundidad de trabajo. La eficiencia del tractor fue mejor en los esquemas 4x2 y 4x4, cuando la carga aplicada y la profundidad de trabajo fueron diferentes a los rangos indicados, respectivamente.
En la Figura 7 al analizar el comportamiento del gastos horarios de combustible y la capacidad de campo para el esquema de tracción 4x2, en función de la fuerza de tracción, la zona de trabajo puede ser definida desde una carga mínima de 6.0 kN hasta una carga de 10.1 kN y se propone un criterio de conexión/desconexión, que es la fuerza de tracción con el valor de 8±2 kN. Así, el tractor debe trabajar en el esquema 4x2 con la fuerza de tracción menor al criterio definido y en el esquema 4x4 con el valor mayor.
CONCLUSIONES
Para diferentes índices de trabajo se determinaron las fronteras de división de las zonas y de conexión/ desconexión de la tracción de las ruedas delanteras en función de la fuerza de tracción.
El tractor Massey Ferguson 592T al trabajar con la rastra de discos de tiro axial presentó mejores índices de trabajo en el esquema de tracción 4x2, cuando las cargas aplicadas fueron menores a la carga de desconexión del eje delantero, y en el esquema de tracción 4x4, cuando tales cargas fueron mayores. De esta formase obtuvo un ahorro de combustible de hasta 16 %, mejoró la potencia de tracción y la productividad hasta 27 y 31 %, y se redujeron los patinajes de las ruedas traseras y el consumo específico de combustible hasta 35 y 45 %, respectivamente.
LITERATURA CITADA
AGCO. 2005. Fendt 800 Vario TMS. Fendt Marktoberdof. Kaufbeuren, Alemania. 32 p. [ Links ]
Al-Janobi, A. 1997. Field comparison of tractive performance of an FWA tractor on sandy loam soil. Misr J. Agric. Eng. 14(1): 27-32. [ Links ]
Andreev A. F., V. I. Kabanau, and V. V. Vantsevich. 2010. Driveline Systems of Ground Vehicles, Theory and Design. CRC Press, USA. 758 p. [ Links ]
ASABE D497.6. 2009. Agricultural Machinery Management Data. In: ASABE STANDARDS 2010. Am. Soc. Agric. Biol. Eng. pp: 339-348. [ Links ]
ASABE EP496.3. 2006. Agricultural Machinery Management. In: ASABE STANDARDS 2010. Am. Soc. Agric. Biol. Eng. pp: 333-338. [ Links ]
Gaytán R., J. G., F. Gómez M., N. Chávez A. y J. A. Capulín Q. 2005. Evaluación comparativa de los tractores NH 6610 y JD 5715T en los aspectos técnicos, agrotécnicos y económicos. Ciencias Téc. Agropec. 14(4): 14-23. [ Links ]
Gonzaga do Vale W., R. Ferreira G., D. Corrêa J., G. Amaral G. y E. Fernandes S. 2011. Desempenho operacional e energético de um trator agrícola durante a operação de roçagem. J. Sol-Gel Sci. Technol. 4(2): 68-75. [ Links ]
IDAE (Instituto para la Diversificación y Ahorro de la Energía). 2005. Ahorro de Combustible en el Tractor Agrícola. Madrid, España. 38 p. [ Links ]
Kolator, B., and I. Białobrzewski. 2011. A simulation model of 2WD tractor performance. Comp. Electron. Agric. 76: 231-239. [ Links ]
Mayans C., P. R., J. R. Soca C., y G. J. López C., 2009. Balance de potencia del conjunto formado por el tractor New Holland 6610s y la sembradora v-20. Ciencias Téc. Agropec. 18(4): 1-7. [ Links ]
Mayans C., P. R., J. R. Soca C., G. J. López C., y E. Romantchik K. 2010. Determinación de la fuerza de tracción y potencia a la barra de tiro del tractor New Holland 6610s. Ciencias Téc. Agropec. 19(1): 63-69. [ Links ]
Molari G., L. Bellentani, A. Guarnieri, M. Walker, and E. Sedoni. 2012. Performance of an agricultural tractor fitted with rubber tracks. Biosys. Eng. 111: 57-63. [ Links ]
Morelos M., A., E. Romantchik K., J. G. Gaytán R., y C. A. Villaseñor P. 2009. Fuerzas de tracción de las ruedas del tractor en los esquemas 4x2 y 4x4 al tomar una curva. Ing. Agric. Biosis. 1(2): 77-84. [ Links ]
Nebraska OECD (Organisation for Economic Cooperation and Development). 2005. Summary of OECD, Test 2238 - Nebraska Summary 482, John Deere 6715 Diesel 16 Speed. Institute of Agriculture and Natural Resources. University of Nebraska-Lincoln. 3 p. [ Links ]
OECD (Organisation for Economic Cooperation and Development). 2012. Code 2: OECD Standard Code for the Official Testing of Agricultural and Forestry Tractor Performance. Paris, Francia. 91 p. [ Links ]
PAES (Philippine Agricultural Engineering Standard). 2001. 119: Agricultural Machinery - Four Wheel Tractor - Methods of Test. 35 p. [ Links ]
Patterson, M. S., J. P. Gray, G. Bortolin, and V. V. Vantsevich. 2013. Fusion of driving and braking tire operational modes and analysis of traction dynamics and energy efficiency of a 4x4 loader. J. Terramec. 50(2): 133-152. [ Links ]
Pérez, M. 2006a. Rendimiento de un tractor agrícola en función del sistema de labranza y la carga. I. Características de la tracción. Bioagro 18(1): 49-55. [ Links ]
Pérez, M. 2006b. Rendimiento de un tractor agrícola en función del sistema de labranza y la carga. II. Consumo de combustible y resistencia a la rodadura. Bioagro 18(1): 57-62. [ Links ]
Romantchik E. K., I. Sandoval A. N. Chávez A., J. Gaytán R., y P. Mayans C. 2009. Resistencia traccional del subsolador en función del ancho de trabajo. Ing. Agríc. Biosis. 1: 49-53. [ Links ]
Sahay, C. S., and V. K. Tewari. 2004. Computer simulation of tractor single-point drawbar performance, Biosys. Eng. 88(4): 419-248. [ Links ]
Silveira, G. M. 2001. Sistema informativo de operação em campo, baseado na aquisição automática de dados. Rev. Bras. Eng. Agríc. Amb., Campina Grande 5(2): 365-368. [ Links ]
Vantsevich, V. V. 2007. Multi-wheel drive vehicle energy/fuel efficiency and traction performance: Objective function analysis. J. Terramec. 44(3): 239-253. [ Links ]
Vantsevich, V. V. 2008. Power losses and energy efficiency of multi-wheel drive vehicles: A method for evaluation. J. Terramec. 45(3): 89-101. [ Links ]
Wiley J. C., and Turner R. J. 2008. Power Hop Instability of Tractors. ASABE. Distinguished Lecture Series No. 32. ASABE Publication Number 913C0108. Am. Soc. Agric. Biol. Eng. St. Joseph, Mich. USA. 64 p. [ Links ]
Zoz, F. M., R. J. Turner, and L. R. Shell. 2002. Power delivery efficiency: a valid measure of belt and tire tractor performance. Trans. ASAE 45(3): 509-518. [ Links ]

