










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkAgrociencia
versión On-line ISSN 2521-9766versión impresa ISSN 1405-3195
Agrociencia vol.46 no.1 Texcoco ene./feb. 2012
Maquinaria agrícola
Calibración estática de un sistema de control automático de tasa variable de fertilizante
Static calibration of a system for automatic control of fertilizer variable dosage
José F. Reyes-Aroca1*, David F. Berrios-Araya1, Rodrigo A. Ortega-Blu2, Wilson D. Esquivel-Flores1
1 Departameno de Mecanización y Energía, Facultad de Ingeniería Agrícola, Universidad de Concepción. Vicente Méndez 595, casilla 537, Chillán. Chile. * Autor responsable: (jreyes@udec.cl) (dberrios@udec.cl) (wesquive@udec.cl).
2 Departamento Industrias, Universidad Técnica Federico Santa María. Avenida Santa María 6400, Vitacura, Santiago, Chillán, Chile. (rodrigo.ortega@usm.cl).
Recibido: agosto, 2011.
Aprobado: noviembre, 2011.
Resumen
En general las máquinas sembradoras abonadoras se diseñan para un rango de dosificación nominal que puede variar dependiendo del tipo de fertilizante a usar, lo cual requiere su calibración para cada tipo específico de aplicación. En este experimento se implementó y evaluó en laboratorio un sistema de control automático de dosis variable de fertilizante. El sistema se compone de un microcontrolador con pantalla de cristal líquido (LCD), una electroválvula proporcional de control de flujo hidráulico, un motor hidráulico montado sobre el eje dosificador de la máquina sembradora y un sensor de velocidad de rotación del eje dosificador. El software de control de este sistema opera con un mapa de prescripción de dosis de fertilizante, basado en la fertilidad de sitio específico de suelo previamente determinado. El sistema se calibró para dosificaciones de 70 a 130 kg ha-1 para un fertilizante de liberación controlada (FLC) denominado Basacote Starter (BS) de granulometría uniforme, y una dosificación de 190 a 420 kg ha para una mezcla física (MF) de fertilizante (urea al 29 % + fosfato diamónico al 71 %). Las constantes de calibración calculadas fueron 259.6 cm3 rev-1 para FLC y 270.2 cm3 rev-1 para MF las cuales se cargaron al microcomputador para una calibración estática-automática. La calibración automática final indicó que el coeficiente de variación en la dosificación del sistema automático varía de 0.37 % para una dosis objetivo de 70 kg ha-1 con Basacote Starter a 3.74 % para una dosis objetivo de 42 kg ha-1 de MF. Además, el error esperado de dosificación del sistema automático en terreno puede variar de 0.19 kg ha-1 para una dosis objetivo de 70 kg ha-1 de Basacote Starter a 29.26 kg ha-1 MF.
Palabras clave: dosis variable, dosificador, agricultura de precisión.
Abstract
In general, fertilizer seeder machines are designed for a nominal rate range that may vary depending on the type of fertilizer to use, which requires its calibration for each specific type of application. In this experiment a system of automatic control of variable-rate fertilization was implemented and evaluated in the laboratory. The system consists of a microcontroller with liquid crystal display (LCD), a proportional electro-valve of hydraulic flow control, a hydraulic motor mounted on the dispenser shaft of the seeder machine and a speed sensor of rotation of the shaft dispenser. The control software of this system operates with prescription map of fertilizer rate, based on site-specific fertility of soil previously determined. The system was calibrated for rates from 70 to 130 kg ha-1 for a controlled-release fertilizer (FLC) called Basacote Starter (BS) of uniform granulometry, and a rate from 190 to 420 kg ha-1 for a physical mixture (MF) of fertilizer (urea 29 % + diammonium phosphate 71 %). The calibration constants calculated were 259.6 cm3 rev-1 for FLC and 270.2 cm3 rev-1 for MF, which were charged to the microcomputer for a static-automatic calibration. The final automatic calibration indicated that the coefficient of variation in the rate of the automatic system varies from 0.37 % for a target rate of 70 kg ha-1 with Starter Basacote at 3.74 % to a target rate of 420 kg ha-1 in MF. In addition, the expected error of rating of the automatic system in the field can vary from 0.19 kg ha-1 for a target rate of 70 kg ha-1 of Basacote Starter at 29.26 kg ha-1 for a target rate of 420 kg ha-1 of MF.
Key words: variable rate, dispenser, precision agriculture.
INTRODUCCIÓN
La agricultura de precisión (AP) utiliza tecnologías de la información y comunicación para mejorar los procesos de toma de decisiones que permitan maximizar la producción. La AP consiste en obtener datos georeferenciados de zonas para conocer mejor lo que puede suceder en una zona durante el desarrollo de las labores agrícolas. Los sitios de cultivo pueden presentar variabilidad topográfica, por génesis de suelo, por el tipo de manejo, etc. La AP permite actuar selectivamente respecto a un sitio específico del cultivo en la aplicación de semillas, fertilizantes, control de malezas y pestes en función del análisis de la información recolectada en terreno. Mientras más diferencias de potencial de rendimiento tengan esos sitios, es más probable que el manejo del sitio específico sea exitoso. El uso de la AP puede además contribuir al mejoramiento de la productividad y rendimientos, así como a la disminución del impacto ambiental de la actividad agronómica. Una de las áreas de mayor interés en la AP es el manejo de nutrientes de sitio específico (MNSE) mediante tecnología de aplicación de fertilizantes a tasa variable (TTV), concepto promisorio no incorporado con suficiente rapidez a las prácticas productivas de la agricultura moderna debido a condicionantes económicas, sociales, agronómicas y tecnológicas (Robert, 2002). Existen varios niveles de aplicación del MNSE, sin embargo el punto de partida es la delimitación de zonas de manejo (ZM) o zonas de condiciones uniformes dentro de las explotaciones agrícolas. Se usan varios enfoques para el desarrollo del manejo de zonas de sitio específico: uno se basa en información del suelo (Nolan et al., 2000; Fraisse et al., 2001; Schepers et al., 2004); otro se basa en mapas de rendimiento combinando datos de varias temporadas (Blackmore, 2000; Diker et al., 2004); el tercero integra los dos métodos anteriores combinando información del suelo y mapas de rendimiento (Whelan et al., 2002; Franzen and Nanna, 2002; Hornung et al., 2003). Las distintas capas de información se pueden combinar usando algunos algoritmos basados en conceptos estadísticos, pero no hay suficiente información respecto al método más eficiente para combinar capas de información con el propósito de definir el ZM con base a propiedades de fertilidad de suelo.
El manejo de cultivo con dosis variable tiene relación directa con la variabilidad del suelo y del cultivo para tomar decisiones en la aplicación de insumos. Para aplicar dosis variables hay equipos que permiten programar el control automático en tiempo real del flujo de líquidos o granulados aplicados por el equipo, para regular y monitorear la aplicación. Dichas tecnologías permiten incorporar varios elementos de automatización, como aditamento complementario en equipos comunes, habilitándolos para el uso de metodologías de tasa variable. Esta aplicación es referenciada geográficamente mediante un sensor GPS con base a un mapa de prescripción previamente elaborado. Estos mapas se construyen de acuerdo con distintas metodologías de modelamiento de dosis recomendada, ya sea basados en mapas de rendimiento o análisis de fertilidad del suelo como lo plantean Ortega et al. (2008), Cho et al. (2000) y Delin (2005). Ortega y Santibáñez (2007) evaluaron distintos métodos de zonificación en la aplicación variable de fertilizante utilizando el enfoque de fertilidad del suelo. Con el mismo enfoque, Ortega et al. (2002) evaluaron la factibilidad técnica de aplicar dosis variable de nitrógeno en cultivo de granos.
Debido a que la calidad de la aplicación variable requiere una rigurosa calibración del equipo usado en esa operación, en la presente investigación se desarrolló una metodología para realizar dicha calibración en una aplicación de dosis variables de fertilizante. La hipótesis fue la factibilidad de implementar una metodología para la calibración estática preliminar de un sistema de aplicación de tasa variable de fertilizante. Los objetivos de esta calibración fueron: 1) medir la dosificación de fertilizante entregada por la máquina y compararla con los datos suministrados por el fabricante; 2) calibrar la máquina en un amplio intervalo de dosificaciones para dos tipos de fertilizante utilizando el sistema de control automático; 3) comparar la tasa de dosificación aplicada automáticamente versus la tasa programada para el cultivo.
MATERIALES Y MÉTODOS
La implementación y configuración de un sistema de dosificación variable de fertilizante para una máquina sembradora-fertilizadora de cereales, se realizó con componentes de automatización y control proporcionados por la empresa AgLeader Technology. Los elementos de hardware utilizados (Figura 1) fueron los siguientes: 1) microcomputador (AgLeader™ modelo Insight, Ames, Iowa, EE.UU.), con pantalla táctil, puerto de comunicación CAN, conexión USB y puerto para tarjeta Compact Flash de archivos de datos; 2) válvula bypass de control de flujo electro hidráulica, marca Raven Industries, modelo Fast Valve de un rango de caudal de 0-227.1 L min-1 y presión máxima de trabajo de 180 bar; 3) GPS marca AgLeader modelo GPS1500 y exactitud inferior a 1 m, que entrega la posición geográfica y velocidad de la sembradora al sistema; 4) sensor de velocidad de rotación del eje de aplicación marca Raven Industries, modelo 256CPR con una precisión de 256 pulsos por vuelta; 5) motor hidráulico marca Venturi, modelo MOR R 375, rango de potencia 5.0 de 6.5 kW, presión máxima de trabajo de 140 bar y rango de velocidad 0 a 160 rpm. En la Figura 2 se muestran los componentes de hardware del sistema automático que fueron dispuestos tanto en el tractor como en la sembradora.
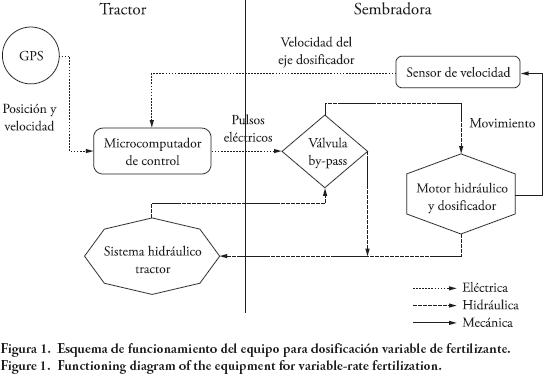

El microcomputador de control y el sensor GPS se instalaron en el tractor eligiendo un lugar de fácil visión y manejo para el operador. La electroválvula, el motor hidráulico, el sensor de rotación y los conectores eléctricos, se montaron directamente en la sembradora. El software utilizado fue el SMS Advanced desarrollado por la empresa AgLeader, compatible con el micro-computador y los distintos formatos de archivos de sistemas de información geográfica (SIG). Este software permite construir mapas de prescripción de dosis variables para fertilización, además de leer y exportar la información generada por el mapa.
Sistema tractor-sembradora fertilizadora
Se usó una máquina sembradora cero labranza marca Baldan, modelo SPD 2200 con una antigüedad de 10 años. Además se utilizó un tractor Ford modelo 6610 año 1987, con potencia de 86 Hp al eje toma de potencia y una presión de salida del sistema hidráulico remoto de 60 bar. La máquina sembradora consta de dos ejes dosificadores de fertilizante manejadas por transmisión mecánica, uno por cada rueda de transporte (izquierda y derecha). Cada sección del eje dosificador regula 7 y 8 líneas de bajada de fertilizante respectivamente; posee un ancho de trabajo de 3.5 m, un ancho de aplicación de 2.37 m y una separación entre líneas de 15.8 cm. La sembradora está diseñada para una regulación de dosis de fertilizante mediante combinación de piñones entre eje motriz, eje solidario y eje dosificador, permitiendo una regulación entre 50 a 947 kg ha de fertilizante según la combinación empleada. Por las características del tractor y para simplificar la configuración hidráulica del sistema, fue necesario implementar un circuito auxiliar, que consistió en tomar presión hidráulica de la línea que alimenta uno de los cilindros elevadores de discos de la sembradora, directamente a la válvula reguladora de flujo hidráulico. Esta válvula posee una entrada, una salida regulada y una descarga del exceso de aceite. El aceite de salida regulada de la válvula entrega la potencia necesaria al motor hidráulico para su movimiento, mientras que la descarga del exceso constituye el retorno que va directamente al circuito de retorno de la sembradora. Durante la labor el GPS indica la posición y la velocidad de siembra al microcomputador de control, simultáneamente el sensor de velocidad de rotación indica la velocidad de giro del eje dosificador; datos que el microcomputador traduce en dosis instantánea, la cual compara en tiempo real con la dosis objetivo que indica el mapa de prescripción y de esta manera controla automáticamente la velocidad del motor hidráulico unido a uno de los dos ejes dosificadores previamente conectados mediante una unión soldada.
Calibración estática manual
Para conocer la dosificación real del eje dosificador se realizaron ensayos en laboratorio con bolsas plásticas transparentes situadas en cada bajada de fertilizante eligiendo una combinación de piñones indicada por el fabricante, correspondiente a dosificaciones de 63.92, 99.88 y 200.45 kg ha-1 para Basacote Starter y 192.4, 300.3 y 432.5 kg ha-1 para Mezcla Física (MF), con una velocidad de siembra simulada de 8 km h-1 mediante un cilindro de tracción accionado por un motor reductor eléctrico y empleando 10 vueltas de la rueda de transporte cuyo perímetro es 3.9 m. Se realizaron tres pruebas por ensayo para trabajar con el promedio de ellas. El contenido de las bolsas se pesó con una balanza Soehnle (0.2 g precisión). A partir de la experiencia mencionada, la dosis de fertilizante se calculó con la ecuación:

donde, DE es la dosis estimada de fertilizante en kg ha-1; M es la media aritmética del peso de las muestras en kg; a es el número de bajadas de fertilizante; P es el perímetro de la rueda motriz en m; n es el número de vueltas de la rueda motriz en revoluciones; Aa es el ancho de aplicación de la sembradora en m. El peso teórico en kg de fertilizante por revolución del eje dosificador para la máquina sembradora utilizada se calculó como:

donde, K son los kg de fertilizante por revolución del eje dosificador (kg rev-1) indicados por el fabricante; Dt es la dosis teórica de fertilizante indicada por el fabricante en kg ha-1; Rt es la relación de transmisión entre la rueda de transporte de la sembradora y el eje dosificador de fertilizante cuyos valores se indican en Cuadro 1 y Cuadro 2; N es el número de vueltas de la rueda de transporte por hectárea en rev ha-1 . El número de vueltas de rueda de transporte por hectárea N se calculó con la ecuación:

donde, Aa es el ancho de aplicación de la sembradora en m y P es el perímetro de la rueda motriz en m. A partir de los resultados obtenidos de la ecuación (1) la cantidad de fertilizante real por revolución el eje dosificador para las dosis prescritas para Basacote Starter y MF se determinó mediante la expresión:

donde la dosificación real Ka se expresa en kg rev-1. Una vez generados los valores de Ka se realizó un ajuste lineal, para estimar un valor representativo Kaa de dosificación de la máquina en los rangos de dosificación analizados. Para este propósito se aplicó el método de mínimos cuadrados a la ecuación:

donde DE es la dosis por hectárea calculada en kg ha-1; Kaa es la dosificación ajustada en kg rev-1, de la sembradora; a es la pendiente de la recta de ajuste; b es la intercepción de la recta de ajuste. Las ecuaciones de mínimos cuadrados son:

donde DEi es el i-ésimo término de DE y Kai es el i-ésimo término de Ka.
Calibración estática automática
El sistema de dosificación automática comandado por el microcomputador se usó para realizar una calibración final de dosificación variable para los dos tipos de fertilizante usados en la calibración estática manual: 1) fertilizante compuesto granular de liberación controlada, Basacote Starter, con densidad aparente promedio 958 kg m-3 ; 2) una mezcla de fertilizantes, MF (urea al 29 % + fosfato diamónico al 71 %), con densidad aparente promedio 862 kg m-3. La toma de muestras y mediciones se hicieron con contenedores de polietileno sujetos en cada bajada de fertilizante de la máquina sembradora. Hubo cinco repeticiones para tres dosificaciones (70, 100 y 130 kg ha-3 ) de Basacote Starter y las mismas determinaciones para tres dosificaciones de M (190, 350 y 42 kg ha-1). En dicha calibración se usó el módulo computacional de calibración que forma parte del software SMS Advanced de AgLeader. Esta aplicación permite simular la dosis, velocidad de aplicación y parámetros de la máquina sembradora, así como la entrega total de fertilizante a usar en la calibración como referencia. En este caso se configuró el sistema para una entrega total de fertilizante de 3000 g en cada repetición. Con los resultados de esta calibración se realizó análisis de desviación estándar (DE) y coeficiente de variación (CV) es decir el cociente entre la DE y la media aritmética para las pruebas realizadas con Basacote Starter y MF.
RESULTADOS Y DISCUSIÓN
En los Cuadros 1 y 2 se muestra los resultados obtenidos mediante la calibración manual de la sembradora, para Basacote Starter y MF. Para cada dosis recomendada se indica el valor de la relación de transmisión de la sembradora Rt, la dosis indicada por el fabricante Dt, la media del peso recolectado en el ensayo de calibración manual M, la dosis calculada mediante la calibración manual DE, la diferencia entre la dosis real y aquella indicada por el fabricante DE—Dt, la constante de calibración Sindicada por el fabricante, la constante de calibración Ka determinada experimentalmente y la constante de calibración Kaa ajustada como media representativa a partir de la dosis calculada experimentalmente.
Los Cuadros 1 y 2 permiten visualizar diferencias importantes entre la dosis indicada por el fabricante y la dosis determinada experimentalmente (DE—Dt), diferencias que pueden variar desde 15.0 kg ha-1 para una dosis de 63.9 kg ha-1 indicada por el fabricante si se usa Basacote Starter, y una diferencia máxima de 51.4 kg ha-1 para una dosis de 432.5 kg ha-1 indicada por el fabricante si se usa MF. La Figura 3 muestra que tanto la constante de calibración experimental Ka como la constante ajustada Kaa siguen una tendencia decreciente con el aumento de la dosis requerida por hectárea y además que las constantes de calibración representativas de ambos fertilizantes en los intervalos de dosis analizados son diferentes, como lo indican los valores mostrados en el Cuadro 3. La inclinación negativa en las líneas de tendencia que presentan las pruebas podría deberse a un efecto dinámico o de patinaje que ocurre al aumentar las dosis, y por ende las revoluciones del eje dosificador. Las diferencias entre ambas correlaciones podría deberse a que un fertilizante es de una composición compuesta y homogénea mientras que el otro es una mezcla de dos compuestos distintos con diferente granulometría, lo que permite deducir la necesidad de realizar calibraciones específicas para cada tipo de fertilizante si se pretende obtener una alta precisión en labores de fertilización de tasa variable.


En los intervalos de dosificación analizados de 70 a 130 kg ha-1 para Basacote Starter y de 190 a 420 kg ha-1 para la MF, las ecuaciones de la rectas de ajuste para determinar un valor medio representativo de la constante Kaa fueron Kaa=0.2617 — 0.00013012 DE para Basacote Starter y Kaa=0.2450877 — 0.0000350573 -DE para MF, con coeficientes de determinación R2 de 0.973 para Basacote Starter y 0.943 para MF. En el Cuadro 4 se muestran los resultados de la calibración final de la sembradora usando el sistema de dosificación automática comandado por el microcomputador, programado para una entrega de fertilizante de 3000 g para cada una de las dosis simuladas con ambos fertilizantes. El valor ingresado al microcomputador expresado en cm3 rev-1 corresponde al cociente entre la media representativa de Kaa y la densidad del producto. Estos valores calculados para cada fertilizante corresponden a 259.6 cm3 rev-1 para Basacote y 270.2 cm3 rev-1 para MF. Los resultados estadísticos del Cuadro 4 muestran una baja variabilidad entre repeticiones reflejada en valores de coeficiente de variación que fluctúan entre un mínimo de 0.37 % para una dosificación de 70 kg ha-1 con Basacote Starter, y un máximo de 3.74 % para una dosificación de 420 kg ha-1 con MF. En la Figura 4 se muestra el error medio esperado en la dosis por hectárea, calculado con la diferencia relativa entre la dosis de referencia (3000 g) y la media de la dosis real obtenida de cinco repeticiones (Cuadro 4). Los valores de error esperado indican que en general el sistema permite una buena aproximación a los valores deseados en el rango analizado. Así, con Basacote Starter el error de aplicación esperado varía entre 0.19 kg ha-1 para una dosis programada de 70 kg ha-1 y 5.85 kg ha-1 para una dosis programada de 130 kg ha-1 ; mientras que con MF el error esperado varía entre 0.44 kg ha-1 para una dosis programada de 190 kg ha-1 y 29.26 kg ha-1 para una dosis programada de 420 kg ha-1 . El error medio esperado aumenta en términos absolutos al aumentar la dosis programada en el sistema automático y este aumento es más significativo para la MF. Esto significa que la constante real de dosificación de la sembradora (en kg ha-1) fue dependiente de la velocidad del eje dosificador de la máquina sembradora, como se observa en la Figura 3. Tal comportamiento indica que se produce mayor patinaje del eje dosificador respecto del fertilizante, al aumentar su velocidad de rotación.

CONCLUSIONES
El sistema automático de aplicación de dosis variable de fertilizante implementado operó exitosamente en una sembradora de granos de cero labranza, permitiendo realizar una calibración estática para dos tipos de fertilizante: Basacote Starter y Mezcla Física. La máquina sembradora mostró diferencias de dosificación importantes entre los valores experimentales y los indicados por el fabricante; estos últimos fueron inferiores a los reales obtenidos mediante la calibración estática experimental. La constante real de dosificación de la sembradora (en kg ha-1) fue dependiente de la velocidad del eje dosificador de la máquina sembradora, probablemente debido al efecto dinámico de patinaje del eje dosificador al aumentar su velocidad de rotación. A partir de los valores de dosificación obtenidos mediante calibración estática, fue posible calcular valores medios de dosificación por hectárea de la sembradora para ambos fertilizantes en rangos de dosificación representativos de aquellos utilizados en la siembra de granos.
LITERATURA CITADA
Blackmore, S., 2000. The interpretation of trends from multiple yield maps. Comput. Electron. Agric. 26: 37-51. [ Links ]
Cho, S. I., I. S. Kang, and H. Choi. 2000. Determination of variable rate fertilizing amount in small size field for precision fertilizing. Ksam 25(3): 241-250. [ Links ]
Delin, S. 2005. Within-field variations in grain protein content-relationships to yield and soil nitrogen and consistency in maps between years. Precision Agric. 5: 565-577. [ Links ]
Diker, K., D. F. Heermann, and M. K. Brodahl. 2004. Frequency analysis of yield for delineating yield response zones. Precision Agric. 5, 435-444. [ Links ]
Fraisse, C. W., K. A.Sudduth, and N. R. Kitchen. 2001. Delineation of site-specific management zones by unsupervised classification of topographic attributes and soil electrical conductivity. Trans. ASAE 44: 155-166. [ Links ]
Franzen, D. W., and T. N. Nanna. 2002. Management zone delineation methods. In: Robert, R. H. Rust, and W. E. Larson (eds). Proceedings of the Sixth International Conference on Precision Agriculture and Other Resource Management. (CD). ASA/CSSA/SSSA, Madison, WI, USA. [ Links ]
Hornung, A., R. Khosla, R. Reich, and D. G. Westfall. 2003. Evaluation of site-specific management zones: grain yield and nitrogen use efficiency. In: Stafford, J. V., and A. Werner (eds). Proceedings of the Fourth European Conference on Precision Agriculture. Wageningen Academic Publishers, Wageningen, The Netherlands, pp: 297-302. [ Links ]
Nolan, S C., T. W. Goddard, G. Lohstraeter, and G. M. Coen. 2000. Assessing management units on rolling topography. In: Robert, P. C., R. H. Rust, and W. E. Larson (eds). Proceedings of the Fifth International Conference on Precision and Other Resource Management. (CD). ASA/ CSSA/SSSA, Madison, WI, USA. [ Links ]
Robert, P. C. 2002. Precision agriculture: a challenge for crop nutrition management. Plant Soil 247: 143-149. [ Links ]
Schepers, A. R., J. F. Shanahan, M. A. Liebig, J. S. Schepers, S. H. Johnson, and A. Luchiari Jr. 2004. Appropriateness of management zones for characterizing spatial variability of soil properties and irrigated corn yields across years. Agron. J. 96, 195-203. [ Links ]
Ortega, R. A., J. A. Ortega, and W. Foster. 2002. Technical-Economical Feasibility of Site-Specific Nitrogen Management in Traditional Crops in Chile. Proceedings of the 6th Conference on Precision Agriculture and Other Precision Resources Management. (CD). Minneapolis, Minnesota. [ Links ]
Ortega, R. A., and O. Santibáñez. 2007. Agronomic evaluation of three zoning methods based on soil fertility in corn crops (Zea maize L.). Computers and Electronics in Agric. 58 (1): 49-59. [ Links ]
Ortega, R. A., R. E. Muñoz, L. E. Acosta, and J. S. Riquelme. 2008. Optimization model for variable rate application in extensive crops in Chile. Proceedings of the 9th International Conference on Precision Agriculture. (CD). (ICPA), Denver, CO, USA. [ Links ]
Whelan, B. M., J. Cupitt, and A. B. McBratney. 2002. Practical definition and interpretation of potential management zones in Australian dryland cropping. In: Robert, P. C., R. H. Rust, and W. E. Larson. (eds). Proceedings of the Sixth International Conference on Precision Agriculture and Other Resource Management. (CD). Madison, WI, USA. [ Links ]

