










Servicios Personalizados
Revista

Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
 Citado por SciELO
Citado por SciELO Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkAgricultura técnica en México
versión impresa ISSN 0568-2517
Agric. Téc. Méx vol.34 no.4 México oct./dic. 2008
Artículos
Sistema de riego automatizado en tiempo real con balance hídrico, medición de humedad del suelo y lisímetro*
Automated irrigation system in real–time with water balance, soil moisture measurement and lysimeter
Martiniano Castro Popoca1§, Francisco Miguel Águila Marín1, Abel Quevedo Nolasco1, Siegfried Kleisinger2, Leonardo Tijerina Chávez1 y Enrique Mejía Sáenz1
1 Programa de Hidrociencias, Colegio de Postgraduados. km 35.5 carretera México–Texcoco, C. P. 56230, Montecillo, Texcoco, Estado de México, México.
2 Institut für Agrartechnik. Universität Hohenheim, Stuttgart, Alemania.
§ Autor para correspondencia:
mcastro@colpos.mx
*Recibido: Enero de 2007
Aceptado: Diciembre de 2008
RESUMEN
El objetivo de este trabajo fue desarrollar un sistema de riego automatizado en tiempo real para determinar el momento oportuno y cantidad de riego, monitoreado por medio de tecnologías de información (TI). El estudio se realizó en el Colegio de Postgraduados del Campus Montecillo, del 10 de junio al 11 de septiembre de 2006. El sistema se compone de un programa de cómputo y un dispositivo de control (datalogger CR10X Campbell Scientific). El sistema considera tres estrategias de riego las cuales fueron probadas. En la primera estrategia de riego se utilizó un lisímetro de pesada, en la segunda el contenido volumétrico del agua en el suelo fue medido con un sensor TRIME TDR y para la tercera se uso el método del balance hídrico climático con base en la evapotranspiración de referencia (ETo) (Penman–Monteith). Se evaluó el funcionamiento general del sistema de riego y se monitoreo a través de internet y dispositivos móviles por medio de una computadora central configurada como servidor (Web y WAP). Se calculó el rendimiento del cultivo de prueba calabaza 'zucchini grey' (cucurbita spp.), el consumo de agua de cada estrategia de riego y productividad de agua. Los resultados obtenidos mostraron que es posible automatizar y controlar la aplicación del agua de acuerdo a las estrategias de riego considerando un programa de riego, una unidad de control y usando tecnologías de información.
Palabras clave: automatización de riego, calabaza, modelo Penman–Monteith, tecnologías de información.
ABSTRACT
The aim of this research was to develop an automated irrigation system in real–time to determine the right moment and quantity of irrigation, monitored through information technologies (IT). The study was carried out at the Colegio de Postgraduados Campus Montecillo, from June 10 to September 11 of 2006. The system is composed of a microcomputer software and a control device (datalogger CR10X Campbell Scientific). The system considers three irrigation strategies which were tested. In the first irrigation strategy a weight lysimeter was utilized, in the second the volumetric soil water content was measured with a TRIME TDR sensor and for the third a climatic water balance method based on the reference evapotranspiration (ETo) (Penman–Monteith) was used. The general operation of the irrigation system was evaluated and monitored through internet and mobile devices through a central computer configured as server (Web and WAP). The yield of the test crop pumpkin zucchini grey (cucurbita spp.) was calculated, as well as water consumption of each irrigation strategy and water productivity. The results indicated that is possible to automatize and control the water application according to the irrigation strategies considering an irrigation program, a control unit and using information technologies.
Key words: information technologies, irrigation automation, Penman–Monteith model, pumpkin.
INTRODUCCIÓN
Cada día en más regiones del mundo el agua se convierte en un recurso escaso y costoso, por lo que en la agricultura –el mayor consumidor de agua– se deben tomar medidas para hacer un uso más eficiente del agua. Generalmente en la agricultura se tienen altos consumos de agua causados por la sobreirrigación, lo cual no sólo genera un desperdicio de agua, sino que también, debido a los agroquímicos disueltos, provoca la contaminación de corrientes de agua superficiales y subterráneas (IMTA, 1995) y en algunas zonas el ensalitramiento de los suelos. Un conocimiento de las necesidades de agua de los cultivos no sólo permite un mejor desarrollo para lograr una mayor producción y mejor calidad de las cosechas sino que contribuye también a ahorrar considerables volúmenes de agua (IMTA, 1995b).
A través del tiempo se han desarrollado una gran cantidad de sistemas para la determinación, control y automatización del riego que permiten un consumo de agua más reducido. Bralts et al. (1986) desarrollaron un programa de cómputo (SCS–Scheduler) para el manejo del riego, los datos de entrada se programaron en un datalogger, el programa incluye estados del sistema, secciones de riego, control de encendido y apagado de dispositivos. En el mismo sentido Wessels et al. (1995) desarrollaron un sistema automático para el riego con agua salina, controlado por computadora, donde datos meteorológicos y de lluvia se almacenan para calcular la evapotranspiración, control del nivel de salinidad (solución salina con NaCl y CaCl2) del agua de riego, registró de datos climáticos y gasto hidráulico de la unidad de riego, programación de los riegos y el accionamiento de las bombas dosificadoras, además facilitó la comunicación con el sistema vía modem con otras computadoras. Xin et al. (1995) desarrollaron un prototipo de sistema experto (CIMS) para el manejo del riego en tiempo real, protección de heladas y control de la fertilización en cítricos; usaron como datos de entrada información del contenido de humedad en el suelo y del clima de una estación meteorológica automatizada.
El sistema controló de manera automática el encendido y apagado de válvulas de acuerdo a criterios preestablecidos, así como la aplicación de la fertilización de manera simultánea o separada con el riego. Con esta tendencia, Moreno et al. (1996) desarrollaron un programa de cómputo (AUTRI ver 1.0) para la automatización de un sistema de riego localizado, el programa utiliza dos estrategias para determinar el momento de riego: 1) mediante el balance hídrico (con base en variables climatológicas, datos de suelo y cultivo) y 2) monitoreo del potencial del agua en el suelo a través de un electrotensiómetro. Por su parte, Águila (2003) desarrollo un sistema automatizado para el manejo del riego en tiempo real, se utilizaron varios algoritmos para procesar la información meteorológica, suelo, cultivo y diferentes estrategias para determinar el riego, un datalogger (CR10X) a través de sus canales de control activa el sistema de distribución del agua, hasta que se cubren los requerimientos del cultivo.
Sin embargo, hasta ahora ninguno de estos sistemas, se encuentran en la práctica con una aceptación considerable, las razones principalmente se deben a la alta demanda de tiempo, trabajo y capacitación para operar y alimentar de datos e información estos sistemas (Águila, 2003).
Por lo que, resulta necesario continuar en este campo para desarrollar sistemas de riego automatizado que aprovechen nuevas tecnologías. La presente investigación se efectuó con el objetivo de desarrollar un sistema de riego automatizado en tiempo real para determinar, controlar el momento oportuno y la cantidad de riego, monitoreado por medio de las tecnologías de información (TI).
MATERIALES Y MÉTODOS
Para el desarrollo, evaluación y monitoreo del sistema automatizado de riego, se implementaron tres estrategias de riego (lisímetro, TDR y balance hídrico climático). El estudio se realizó en el Colegio de Postgraduados, Campus Montecillo, donde se localiza la estación meteorológica, la cual se ubica a una latitud norte de 19° 21', longitud oeste de 98° 54' y a una altitud de 2 240 m. Una unidad experimental se formó de una cama de 0.25 m de altura, 1.4 m de ancho y 68.8 m de largo, con una superficie total de 96.32 m2, y así para cada una de las estrategias con tres repeticiones. La densidad de siembra fue de 2.6 plantas x m2 y la preparación del terreno consistió en paso de arado y rastreo. El suelo del sitio tiene una textura con de 18.0 % de contenido de arcilla, 59.0% de arena, 23.0% de limo, 0.8% de materia orgánica y una densidad aparente de 1.31 g/cm3. cuyo pH es de 7.50 y salinidad de 0.16 dS m–1. La capacidad de campo (CC) de 23.5% con base a volumen, punto de marchitez permanente (PMP) de 13.0% con base a volumen, la humedad aprovechable (HA) de 10.5 %, y conductividad eléctrica del extracto de saturación de 1.44 dS m–1. El agua que se uso en esta investigacion se tomó de la red general del Colegio de Postgraduados, con un pH de 6.90 y conductividad eléctrica 0.41 dS m–1.
Para la prueba y evaluación del sistema se estableció un cultivo de calabaza cultivar Zucchini Grey (Cucurbita spp.), en el período comprendido del 10 de junio al 11 de septiembre de 2006. El sistema de medición y control con sensores meteorológicos que se instaló para la prueba del fue una estación meteorológica con un dataloggerprogramable modelo CR10X marca Campbell Scientific, sistema de riego automatizado, un sensor para medir la temperatura del aire y la humedad relativa, modelo HMP45C; marca Vaisala/Finland, un anemómetro modelo A100R marca Vector Instrument North Wales; un piranómetro para medir la radiación solar global, modelo SP–LITE; marca Kipp–Zonen, un pluviómetro modelo 5.4031.30.007 marca Thies Clima; un panel solar modelo SM10 marca Siemens y una batería para el suministro de energía eléctrica del dataloger, así como una fuente de alimentación de 127 Vca a 12 Vcd, para la tarjeta de comunicación de red modelo NL100 marca Campbell Scientific que se utilizó para el monitoreo en tiempo real y transferencia de datos con la computadora central (servidor). Se contó además con un módulo de relevadores con entrada de control de 5 Vcd y salida de 24 Vca para la apertura o cierre de las válvulas electromagnéticas del riego como se observa en la (Figura 1 y Figura 2).
La computadora central se configuró para trabajar como un servidor de páginas Web, que hace uso del protocolo http (HyperText Transfer Protocol), y servidor de comunicación de dispositivos móviles, con el protocolo WAP (Wireless Application Protocol). Para el monitoreo en tiempo real del cultivo se utilizó una cámara IP (Internet Protocol) de vídeo modelo Wireless–B marca Linksys que envía vídeo en directo a Internet a través de un explorador Web que puede ser visto en cualquier lugar del mundo.
Un sensor celda de carga modelo 20210, marca Artech se utilizó en conjunto con el lisímetro de pesada para la primera estrategia de riego, cuya operación se determina en función del cambio en el peso debido a la pérdida de agua en un monolito de suelo, en la segunda estrategia se uso un sensor de medición del contenido volumétrico del agua en el suelo, modelo TRIME–EZ (time domain reflectometry with intelligent micro element), marca IMKO, que se instaló en la zona de las raíces del cultivo y para la tercera estrategia se trabajo el método del balance hídrico climático (BHC) con modelo de planta (Penman–Monteith), con base en la evapotranspiración de referencia (ETo). El sistema de riego fue concebido de tal manera que este funcionará mediante la interconexión de sensores de humedad de suelo TDR, celda de carga y meteorológicos a un datalogger CR10X en el cual se encuentra el programa de riego residente en su memoria. Los riegos se realizaron con un sistema de riego por goteo, se colocaron cintillas marca Aqua–TraXX modelo (EA 508 12 45) con emisores a cada 0.3 m y un caudal de emisiónde 0.954 L h–1, con una presión de operación de 1.0 kg cm2. Así también, en cada una de las diferentes estrategias se instaló una válvula solenoide electromagnética para la apertura o cierre del agua.
Dentro de los componentes de software del sistema de riego automatizado, esta el programa de riego que se desarrollo en el lenguaje de programación Edlog, que es una aplicación del software de soporte LoggerNet.
Con este software se logró la comunicación y colección de información del datalogger CR10X al servidor. En el programa de riego se tienen diversos algoritmos para procesar la información del suelo y cultivo en conjunto con la información meteorológica (Figura 3). Cuando existe la necesidad de riego el datalogger a través de sus canales de control y módulo de relevadores acciona el sistema de distribución del agua hasta que se cubren los requerimientos hídricos del cultivo. El programa de riego se elaboró modularmente en diversas subrutinas tal como se presenta en la (Figura 4).
Para el despliegue en tiempo real (cada 10 s) de la información meteorológica y de riego a través de un navegador de Internet, tanto en una computadora personal como en un dispositivo móvil, se utilizó el software de la Compañía Campbell Scientific que se denomina RTMC (real time data monitoring and control)–Web Server, se tomo como base para esto el programa "proyecto" que se desarrollo con la aplicación RTMC del software de soporte LoggerNet. Para la elaboración de reportes horarios, diarios y mensuales se utilizó la aplicación Split del software de soporte LoggerNet, y se desplegaron a través de un navegador de Internet.
Por otra parte, la base de datos colectada directamente de la estación meteorológica y de riego fue desplegada gráficamente utilizando el lenguaje de programación Turbo Pascal versión 5.5 de la compañía Borland International y el lenguaje de programación PHP.
Estrategias de riego
Lisímetro de pesada. La conducción de esta estrategia con base en la medición (cada 2 min) del contenido de humedad del suelo, se utilizó el sensor (celda de carga) del lisímetro de pesada en función del cambio en el peso debido a la perdida de agua en el monolito de suelo. La celda de carga entregó niveles de voltaje que fueron leídos por el datalogger (se consideraron dos valores umbrales para fin (1.22344 mv) e inicio (1.18091 mv) de riego, que corresponden a capacidad de campo (FC) o (23.5% con base a volumen) y 80% de humedad aprovechable (HA) o (21.4% con base a volumen), respectivamente.
Sensor TDR. La realización de esta estrategia con base en la medición (cada 2 min) del contenido volumétrico de agua en el suelo, se utilizó el sensor TDR TRIME–EZ a una profundidad de 0.16 m en la zona de las raíces del cultivo. Se consideraron dos valores umbrales, para fin e inicio de riego, los cuales corresponden a capacidad de campo (FC) o (23.5% con base a volumen) y al 80% de humedad aprovechable (HA) o (21.4% con base a volumen) respectivamente.
Además para desplegar los reportes de la información en dispositivos móviles con la tecnología WAP se utilizó el lenguaje de marcado WML (wireless markup language), y un navegador emulador de teléfonointeligentedelacompañíaWinWAPTechnologies.
Balance hídrico climático. Se realizó a partir de la combinación de datos meteorológicos, datos específicos del cultivo y del suelo, donde la determinación del momento de riego se hizo en tres etapas:
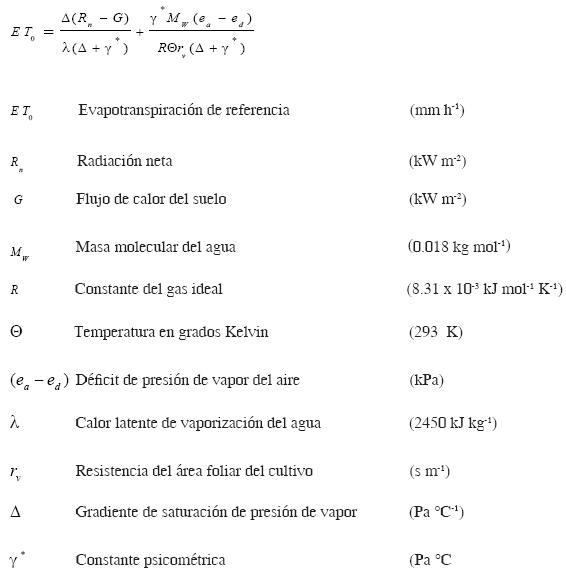
– Cálculo horario de la evapotranspiración de referencia (ETo) según Penman–Monteith a partir de los datos in situ de temperatura del aire, humedad relativa, velocidad del viento y radiación solar, medido con la estación meteorológica, donde el modelo de Penman–Monteith se expresa como:
–Cálculo a partir de curvas generadas de los valores del coeficiente de cultivo (Kc) (Figura 5), para la estimación de la evapotranspiración del cultivo (ETc) y así realizar el balance hídrico, para esto se consideró la profundidad actual de las raíces (ProRaíz_m) (Figura 6) y el factor de abatimiento de humedad permisible (FaAbHuPer) (Figura 7) como una función del día juliano respectivamente (Allen et al., 1998).
–Medición de la precipitación y estimación de la precipitación efectiva según modelo de Palacios (1989). Para cada estrategia, el riego se integró de tres componentes: riego inicio, fertirrigación y riego complementario, el programa de riego consideró un tiempo inicial de riego (riego inicio) previo a la inyección de la fertirrigación, para humedecer el suelo y asegurar que la solución nutritiva fuera aprovechada por el cultivo lo máximo posible y para terminar el riego (riego complementario) que concluyó cuando se alcanzó el umbral de paro que se estableció. En la Figura 8, se muestra el diagrama de flujo de los cálculos que se realizaron para cada una de las estrategias de riego.
RESULTADOS Y DISCUSIÓN
El período de prueba del sistema de riego automatizado se realizó del 10 de junio al 11 de septiembre de 2006. El ciclo total del cultivo de calabaza cultivar zucchini grey (cucurbita spp.) fue de 94 días y se realizó el registro de la información de cada riego para cada una de las estrategias.
La aplicación del agua se realizó en riegos manuales (fertirrigación, cuando no se necesitaba agua pero existió la demanda del fertilizante, que ocurrió cuando hubo lluvia) y automático (que consistió enun riego inicio, fertirrigación y riego complementario).
Riego en función del lisímetro: bajo esta estrategia se realizó una lamina de riego total de 350.0 mm (en 30 riegos, 13 manuales y 17 automáticos). En los riegos manuales se aplicó 1 252.8 L de agua (en 342.6 min) y en los automáticos 3 365.5 L de agua (en 920.0 min) que representó una lamina de 172.8 mm. El resto de la lamina fue por aporte de la precipitación efectiva de 177.2 mm (Figura 9).
Riego en función del sensor de humedad TDR: bajo esta estrategia se realizó una lamina de riego total de 329.3 mm (en 34 riegos, 16 manuales y 18 automáticos). En los riegos manuales se aplicó 1 509.2 L de agua (en 412.7 min) y en los automáticos 2 726.3 L de agua (en 743.0 min) que representó una lamina de 152.1 mm. El resto de la lamina fue por aporte de la precipitación efectiva de 177.2 mm (Figura 10).
Riego en función del balance hídrico climático: bajo esta estrategia se realizó una lamina de riego total de 329.3 mm (en 29 riegos, 12 manuales y 17 automáticos). En los riegos manuales se aplicó 1 155.0 L de agua (en 315.8 min) y en los automáticos 3 410.8 L de agua (en 926.0 min) que representó una lamina de 163.0 mm. El resto de la lamina fue por aporte de la precipitación efectiva de 1 77.2 mm (Figura 11).
Referente al consumo de agua por estrategia de riego, se obtuvo que la estrategia TDR fue la que menos agua empleó, con sólo 152.14 (l m2) y la estrategia que más agua utilizó fue la estrategia lisímetro con 172.84 (l m2). Esta situación pudo presentarse debido tal vez al efecto de histéresis de lacelda de carga del lisímetro, es decir, en el momento en que se estaba regando y que se llegaba al punto de paro del riego, se tenía un retardo en medir el valor actual, por lo que el riego continuaba mayor tiempo.
Manejo y rendimiento del cultivo
La siembra de la calabaza cultivar zucchini grey (cucurbita spp.) se realizó el día 10 de junio de 2006, posterior a la siembra se aplicó una lámina de agua de 12 mm con el propósito de humedecer el suelo hasta llevarlo a capacidad de campo (FC) y con esto garantizar una buena germinación de las semillas. La primera recolección de frutos se realizó a los 52 días después de la siembra. Se realizaron 17 cortes durante el período de cosecha (Cuadro 1). En este cuadro se observó que para la estrategia de riego lisímetro se tuvo un total de 343.7 kg, para la estrategia de riego TDR de 321.8 kg y para la estrategia de riego BHC un total de 341.9 kg. Con respecto a los rendimientos obtenidos (Cuadro 2), se observa que con la estrategia lisímetro se obtuvo el mayor rendimiento con 3.7 (kg m–2) y la estrategia con menor rendimiento fue la estrategia TDR con 3.3 (kg m–2), que representa una diferencia de 0.4 (kg m–2).
De igual forma respecto a los frutos por metro cuadrado que se cosecharon, se obtuvo que la estrategia con el mayor número de frutos fue la de lisímetro con 31.17 (frutos m–2) y la de menor número de frutos fue la estrategia TDR con 29.16 (frutos m–2), lo que representa una diferencia de 2.01 (frutos m–2).
Sin embargo, respecto a la productividad del agua los resultados obtenidos fueron inversamente proporcionales a los rendimientos en producción. Es decir, la estrategia TDR presentó la mayor productividad en kg de fruto por m–3 de agua con 75.96 (kg m–3) y la estrategia lisímetro con 74.43 (kg m–3). Se considera que estas diferencias no son relevantes, sin embargo, pudieron deberse a las frecuencias de riego y las cantidades de agua aplicada en cada uno de los eventos, ya que estos riegos se aplicaron en función a la respuesta de los dispositivos de control (sensores) para determinar el momento oportuno y la cantidad de agua para cada una de las estrategias de riego, así como a la naturaleza de los métodos empleados.
CONCLUSIONES
El programa (software) que se desarrollo para la automatización de un sistema de riego en tiempo real aplicó de manera puntual los requerimientos hídricos en tiempo y cantidad para el cultivo de calabaza cultivar zucchini grey (cucurbita spp.) por lo que constituye una herramienta que puede usarse para el manejo y control del riego.
La integración de información (meteorológica, cultivo, suelo, geográfica y algoritmos), hardware y software interactuaron de acuerdo a lo programado dentro del sistema de riego, lo que permitió el correcto manejo y control, de las tres estrategias implementadas (lisímetro, TDR y balance hídrico climático). La programación modular y estructurada del programa, permitió la fácil inserción de diversos algoritmos y alimentación de información (meteorológicos, cultivo, suelo, geográficos) necesaria dentro del programa (software), indispensables para la estimación objetiva del riego para el cultivo.
El monitoreo continuo durante la prueba del sistema de riego a través del software de soporte Logger Net, Internet y dispositivos móviles (PDA, teléfono celular, etc.), logro dar un seguimiento puntual al estado del sistema, de cada estrategia de riego y de los puertos de control en tiempo real.
Se comprobó que el control del riego se puede realizar de manera automática en tiempo real mediante el uso de diversas tecnologías de información, tal como lo demostró el funcionamiento del sistema.
LITERATURA CITADA
Águila, M. F. 2003. Entwicklung eines vollautomatischen Bewässerungsregelungssystems für den Freilandgemüsebau. Editorial Verlag Grauer, Beuren – Stuttgart, Alemania. ISBN 3–86186–434–7. [ Links ]
Allen, R. G.; Pereira, L. S.; Raes, D. 1998. Crop Evapotranspiration–Guidelines for Computing Crop Water Requirements. Food and Agriculture Organization (FAO), Irrigation and Drainage, Paper No. 56. p. 321. [ Links ]
Bralts, V. F.; Driscoll, M. A. and Kelly, S. F. 1986. Microcomputer based irrigation management and control system. ASAE, Paper No.86–1223. St. Joseph, MI. USA. [ Links ]
Instituto Mexicano de Tecnología del Agua (IMTA). 1995. Coordinación de tecnología de riego y drenaje, Proyecto RD–95062 "Pronóstico de riego en tiempo real". [ Links ]
Instituto Mexicano de Tecnología del Agua (IMTA) 1995b. Coordinación de tecnología de riego y Drenaje, Proyecto RD–95062 "Diagnóstico de la salinidad en el Distrito de Riego 076, Valle del Carrizo, Sinaloa". [ Links ]
Moreno, A. S.; Tijerina, Ch. L.; Acosta, H. R.; Ruiz, C. V. M.; Zazueta, R. F. S. y Crespo, P. G. 1996. Automatización de un sistema de riego localizado, aplicado a una plantación de durazno. Agrociencia, 33(2):191–197. [ Links ]
Palacios, V. E. y Exebio A. 1989. Introducción a la teoría de la operación de distritos de riego. Segunda reimpresión corregida. Centro de Hidrociencias. Colegio de Postgraduados. México. [ Links ]
Wessels, W. P. J., Steyn, W. H. and Moolman, J. H. 1995. Automatic microirrigation and salt injection system for research and commercial applications. Proceeding of the Fifth International Microirrigation Congress. Orlando Fl., USA. ASAE. p. 116–122. [ Links ]
Xin, J. N.; Zazueta, F. S.; Smajstrla, A. G. and Wheaton, T. A. 1995. Real time expert system for citrus microirrigation management. Proceeding of the Fifth International Microirrigation Congress. Orlando Fl., USA. ASAE. p. 787–791. [ Links ]

