











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
PermalinkIntroducción
El cáncer de próstata es a nivel mundial la segunda causa de cáncer y la quinta causa de muerte por cáncer en hombres. En México, estas cifras son aún mayores, siendo la primera causa de cáncer y de mortalidad por cáncer en hombres en nuestro país1.
La búsqueda de técnicas mínimamente invasivas para el tratamiento de cáncer de próstata ha llevado al desarrollo de la técnica laparoscópica asistida por robot (cirugía robótica), la cual, a tres años de su introducción en México, ha proporcionado grandes ventajas. La cirugía robótica permite superar las limitaciones técnicas propias de la laparoscopía convencional y concretar con gran precisión diversos procedimientos quirúrgicos de alta complejidad técnica2. La introducción de la cirugía robótica en urología constituye el avance más reciente de las herramientas mínimamente invasivas. Varios sistemas robóticos han intentado ingresar al campo de la cirugía robótica. En la actualidad, el sistema quirúrgico Da Vinci es el único sistema robótico comercialmente disponible3. Los sistemas robóticos se utilizan en cirugía urológica, cardíaca, torácica, ortopédica, ginecológica y cirugía general.
Sistema quirúrgico Da Vinci
Es un equipo de cirugía robótica aprobado por la Administración de Alimentos y Medicamentos (FDA) de los Estados Unidos en el año 2000. Este sistema quirúrgico está integrado de tres componentes principales4: la consola (a través de la cual el cirujano realiza la operación), el carro quirúrgico (colocado por el lado del paciente), que tiene cuatro brazos robóticos que pueden ser manipulados por el cirujano desde la consola, y un sistema de visión 3D de alta definición.
En Latinoamérica, son contados los centros en los cuales se cuenta con cirugía robótica; particularmente en México, hasta diciembre del 2017, sólo 10 hospitales tenían el equipo, el Hospital Central Militar fue pionero ya que su adquisición fue en noviembre del 20145 (Cuadro I).
Cuadro I: Sistemas quirúrgicos Da Vinci en México.
| Hospital Central Militar |
| Hospital General «Dr. Manuel Gea González» |
| Hospital 20 de Noviembre, ISSSTE |
| Centro Médico ABC Observatorio |
| Hospital Ángeles Pedregal |
| Hospital Ángeles Lomas, Huixquilucan, Edo. de Méx. |
| Hospital Regional de Alta Especialidad de Zumpango, Edo. de Mex. |
| Hospital Ángeles Valle Oriente, Monterrey, Nuevo León |
| Hospital San José, Monterrey, Nuevo León |
| Hospital Puerta de Hierro, Guadalajara, Jalisco |
Consideraciones anestésicas en cirugía robótica
La cirugía robótica tiene el potencial de mejorar el resultado quirúrgico y reducir complicaciones, en comparación con prostatectomía radical abierta6. Los temas críticos para los anestesiólogos durante el procedimiento robótico incluyen: la posición de Trendelenburg, consecuencias fisiológicas del capnoperitoneo, hipotermia, acceso restringido al paciente, embolia venosa gaseosa y enfisema subcutáneo. Por lo que el manejo anestésico de los pacientes implica una evaluación preoperatoria cuidadosa y durante el procedimiento, la gestión de los problemas de ventilación y la gestión de fluido apropiado7.
La combinación de la posición de Trendelenburg y capnoperitoneo influye en la fisiología pulmonar de varias maneras y el mantenimiento de la normocapnia por lo general requiere ajustes en la configuración de ventilador6. Además de que la posición de Trendelenburg y la duración relativamente larga del capnoperitoneo con CO2 (generalmente más de tres horas) pueden aumentar el riesgo de hipoxia intraoperatoria y atelectasia postoperatoria8. Por estos factores, un aumento de PaCO2 puede ser difícil de controlar y se debe considerar que los pacientes son en su mayoría de más de 65 años, por lo que la probabilidad de una dificultad para el manejo de la oxigenación intraoperatoria y el riesgo de complicaciones pulmonares postoperatorias aumentan9.
Efectos respiratorios por el capnoperitoneo
Las presiones intraabdominales entre 12-15 mmHg se utilizan en combinación con la posición de Trendelenburg. Dentro de los efectos respiratorios, el capnoperitoneo puede inducir un daño a las vías respiratorias, reduciendo los volúmenes pulmonares, aumentando la presión de la vía aérea y esto, a su vez, una disminución de la compliance10. Estos efectos se ven exacerbados en pacientes con enfermedad pulmonar crónica u obesidad mórbida. Un aumento de la presión intraabdominal a lo largo de la cirugía con el movimiento cefálico del diafragma resulta en un aumento de más de 50% en la presión pico y presión meseta11 vigilando posibles efectos que pueden ser resultado de la estimulación simpática secundaria a hipercapnia12, como la taquicardia y arritmias.
Efectos respiratorios por la posición de Trendelenburg
La posición Trendelenburg permite mayor exposición de la zona pélvica permitiendo un desplazamiento visceral sobre la cúpula diafragmática. Este movimiento cefálico reduce la capacidad de reserva funcional del pulmón, disminuye la distensibilidad pulmonar y predispone atelectasias. Para superar la influencia negativa de la posición pronunciada de Trendelenburg en los pulmones, se recomienda un volumen tidal de 6-8 mL/kg y una presión positiva al final de la espiración de 4-7 cmH2O para la prevención de la atelectasia y la presión máxima de la vía aérea debe mantenerse por debajo de 35 cmH2O3,13. Para mejorar el intercambio gaseoso, utilizar una relación inspiración-espiración 2:1 o 1:1 ya que proporciona una mejor oxigenación y menor retención de CO23.
Efectos en los gases sanguíneos
El principal objetivo de la monitorización de los gases sanguíneos durante el procedimiento quirúrgico es el mantenimiento de una normocapnia de igual manera para la valoración de la extubación.
La atención anestésica perioperatoria en el paciente candidato a prostatectomía asistida por robot requiere consideraciones especiales debidas al procedimiento, como la posición de Trendelenburg pronunciada y una presión de insuflación de CO2 relativamente alta, considerando que los pacientes candidatos son personas mayores de 65 años. Estos factores hacen que la atención ventilatoria intraoperatoria sea difícil y aumentan el riesgo de complicaciones pulmonares perioperatorias (la mecánica respiratoria intraoperatoria, el análisis perioperatorio de gases en sangre y las pruebas de función pulmonar).
El efecto de la insuflación de CO2 en los niveles ácido-base durante la cirugía robótica provoca una disminución del pH arterial con el riesgo de acidemia14.
Tratamiento anestésico en cirugía robótica
Dos conceptos principales asociados con la prostatectomía robótica son la posición de Trendelenburg y el capnoperitoneo. En cirugías como la resección laparoscópica de próstata asistida por robot requiere una posición de Trendelenburg más pronunciada y una presión más alta de capnoperitoneo, considerando que la disección retroperitoneal también aumenta la absorción de CO215, la labor del anestesiólogo para contrarrestar la hipercapnia se vuelve una tarea difícil, más aún cuando las cirugías son con tiempos mayores que los esperados. Para cumplir estos objetivos dentro del protocolo de atención anestésica y quirúrgica se cuenta con un equipo de gases sanguíneos dentro del quirófano que permite monitorizar la función pulmonar. El objetivo de este estudio fue conocer los cambios gasométricos durante el transoperatorio en pacientes sometidos a cirugía robótica.
Material y métodos
Se realizó un estudio observacional, analítico, prospectivo y trasversal en pacientes sometidos a cirugía robótica. La recolección de datos se realizó en el período de 01 de marzo al 10 de septiembre del 2017. Se incluyeron pacientes masculinos con cáncer de próstata candidatos a resección prostática laparoscópica asistida por robot, se incluyeron pacientes sin patología pulmonar documentada. Se consideraron como criterios de exclusión pacientes con obesidad mórbida (IMC > 35 kg/m2) o aquellos pacientes que no presentaban cuatro gasometrías. Con la finalidad de evitar el efecto Hawthorne (cambio de conductas al sentirse observado), el estudio se realizó en el quirófano 3 del Hospital Central Militar, fue ciego para los médicos adscritos al Servicio de Anestesiología. La adquisición de datos se realizó previa aprobación por los comités de investigación de la Escuela Militar de Graduados de Sanidad con número de oficio EMGS-SP-450, y del Hospital Central Militar con número de oficio C.INV.037.
Se midieron los tiempos quirúrgicos: se contempló la medición del tiempo anestésico, tiempo de cirugía y el tiempo de posición de Trendelenburg. La medición de los parámetros de la gasometría arterial se realizó en los siguientes momentos: después de la inducción de la anestesia (T basal), 120 minutos después de iniciar la insuflación de CO2 (T2h), a los 240 minutos (T4h) y a la suspensión del capnoperitoneo y recuperación de la posición supina (T final). El tiempo que se designó para la medición de las variables se realizó con base en un estudio piloto retrospectivo previo sobre el tiempo de duración de las últimas 30 cirugías robóticas en nuestra institución.
El análisis estadístico descriptivo se realizó con medidas de tendencia central y dispersión para las variables cuantitativas, y con medidas de frecuencias y porcentajes a las variables cualitativas. La estadística inferencial se utilizó para conocer si existe una diferencia entre las variables gasométricas (pH, CO2, HCO3, lactato, volumen tidal) en cada medición y de acuerdo con los supuestos que deben observarse en una distribución normal (Shapiro-Wilk), por lo que para las variables con una distribución normal se realizó t de Student pareada y para las que no tuvieron distribución normal se utilizó U de Mann-Whitney en todo caso se estableció una significancia estadística asociada con un valor de p ≤ 0.05.
Consideraciones éticas
La presente investigación se desarrolló bajo los principios de autonomía, beneficencia y no maleficencia y de acuerdo al Reglamento de la Ley General de Salud en Materia de Investigación en su artículo 17, la presente investigación se encuentra en la categoría I: investigación sin riesgo, ya que la información de las gasometrías y la captura de los datos se realizó con los datos obtenidos en las hojas de anestesia y a su vez con la información proporcionada por los médicos adscritos al Servicio de Anestesia, por lo que ninguno de los investigadores realizó alguna intervención en los pacientes.
Resultados
La muestra estuvo conformada por 30 pacientes que durante el período de estudio cumplieron los criterios de selección, la edad de los pacientes osciló entre 55 y 78 años (rango 23 años), el promedio de edad fue de 65.53 ± 5.92 años, con una mediana de presentación de 64.5 años. El IMC fue en promedio de 27.2 ± 3.3 kg/m2. La presencia de obesidad definida como un IMC > 30 kg/m2 se presentó en el 26.7% (8).
Posición de Trendelenburg
Los pacientes estuvieron sometidos a una posición de Trendelenburg que osciló entre los 22o y los 35o, con un promedio de 28 ± 4o. Con estos datos se observó que hasta el 73.3% (22) presentó una inclinación ≤ 30o y el 26.7% (8) > 30o.
Los valores de los tiempos fueron clasificados como tiempo anestésico, tiempo quirúrgico y tiempo de posición. El tiempo anestésico tuvo valores entre 260-615 minutos con un promedio de 377.3 ± 67.9 minutos, el tiempo quirúrgico fue de 200-585 minutos con un promedio de 326.7 ± 77.4 min, y el tiempo de posición de Trendelenburg fue de 180-540 minutos con un promedio de 291 ± 68.8 min.
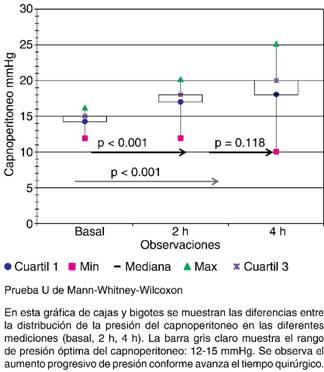
Capnoperitoneo
Los valores del capnoperitoneo oscilaron de 10-25 mmHg en todas las observaciones. De manera basal, se registraron valores mínimos de 12 mmHg y máximos de 16 mmHg con un promedio de 14.6 ± 1.13 mmHg; a las dos horas se observó un incremento de 17.43 ± 1.83 mmHg (12-20 mmHg) y a la medición a las cuatro horas de 18.03 ± 3.04 mmHg (10-25 mmHg). En la Figura 1 se observa el aumento progresivo en cada una de las observaciones.
Volumen tidal y presión inspiratoria pico
El volumen tidal se ajustó en cada paciente de acuerdo con su peso y talla, comenzó con una media de 475.3 ± 46.5 mL y posteriormente con una disminución progresiva a las dos horas los valores fueron de 454.6 ± 60.6 mL (V tidal basal-V tidal 2 h p = 0.01), los valores a las cuatro horas descendieron hasta 436 ± 62.3 mL (V tidal 2 h-V tidal 4 h p = 0.041) y al recuperar la posición, el volumen se incrementó a 473.8 ± 48.4 mL; estos cambios del volumen tidal están inversamente relacionados con el mantenimiento de la presión inspiratoria pico. Para esta variable las mediciones basales presentaron presiones promedio de 14 ± 2.2 cmH2O, las que fueron en aumento a las dos horas con valores de 23.7 ± 3.6 cmH2O (pPico basal pPico 2 h p < 0.001), los valores posteriores sufrieron cambios en aumento con un promedio de 23.7 ± 3.6 a 25.23 ± 4.3 cmH2O (pPico 2 h-pPico 4 h p < 0.003). En la medición final los valores disminuyeron con respecto a los valores previos (cuatro horas) de 25.23 ± 4.3 a 20.03 ± 3.2 cmH2O (pPico 4 h-pPico final p < 0.001).
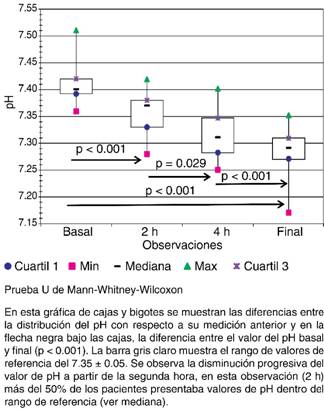
pH
Los valores de pH oscilaron en todas las mediciones de 7.3-7.5; en la medición basal se observa que el 90% (27) de los pacientes al inicio de la anestesia presentó valores de pH en un rango de 7.35-7.45, el 10% (3) presentó valores mayores de 7.45. En la Figura 2 se observa una tendencia a la baja en los valores de pH con el paso del tiempo, en las primeras dos horas la disminución fue de -0.051: pH basal (7.411 ± 0.037)- pH 2 h (7.359 ± 0.036) p < 0.001. En las siguientes dos horas la disminución fue de -0.045: pH 2 h (7.359 ± 0.036)- pH 4 h (7.314 ± 0.041) p < 0.001. En la última medición, la disminución fue de -0.026: pH 4 h (7.314 ± 0.041)- pH fin (7.288 ± 0.04) p < 0.001. Por lo tanto, la disminución en todas las mediciones fue de 0.123: pH basal (7.411 ± 0.037)- pH fin (7.288 ± 0.04) p < 0.001. Con estos datos se puede afirmar que el grupo de pacientes con un pH < 7.35 fue incrementándose en las posteriores observaciones, comenzando después de las dos horas con el 33% (10) y al final con el 97% (27) de la muestra.
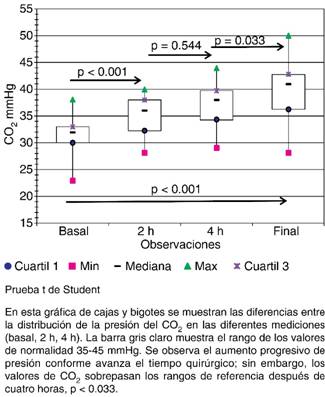
PaCO2
Los valores de la PaCO2 oscilaron de 23-50 mmHg en todas las observaciones. El cambio de la PaCO2 fue en aumento conforme trascurrió el tiempo (Figura 3). Se observaron diferencias significativas entre PaCO2 basal (31.33 ± 3.7 mmHg)- PaCO2 2 h (35.27 ± 3.6 mmHg) p < 0.001, posteriormente se mantuvo en las siguientes dos horas PaCO2 2 h (35.27 ± 3.6 mmHg)- PaCO2 4 h (36.03 ± 7.0 mmHg) p = 0.544, para que en la medición final aumentará, PaCO2 4 h (36.03 ± 7 mmHg)- PaCO2 fin (39.9 ± 5 mmHg) p < 0.033. Por lo que el aumento en promedio de la PaCO2 fue 8.57 mmHg: basal (31.33 ± 3.7 mmHg)- PaCO2 fin (39.9 ± 5 mmHg) p < 0.001.
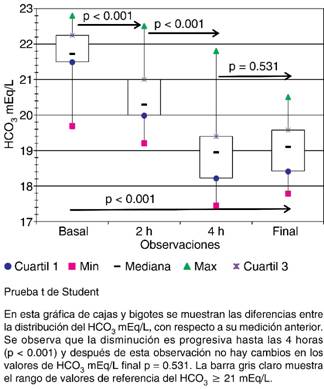
HCO3
Los valores registrados de la HCO3 oscilaron de 17-23 mEq/L en todas las observaciones. En la Figura 4 se muestra el descenso de los valores del HCO3: en las primeras dos horas el descenso fue de -1.23 mEq/L: HCO3 basal (21.74 ± 0.65 mEq/L)- HCO3 2 h (20.51 ± 0.8 mEq/L) p < 0.001. En las siguientes dos horas el descenso fue de -1.52 mEq/L: HCO3 2 h (20.51 ± 0.8 mEq/L)- HCO3 4 h (18.99 ± 0.96 mEq/L) p < 0.001. En la última medición no se observaron diferencias estadísticamente significativas: HCO3 4 h (18.99 ± 0.96 mEq/L)- HCO3 fin (19.09 ± 0.78 mEq/L) p = 0.531. De manera general, los valores de HCO3 tuvieron un descenso de -2.65 mEq/L: HCO3 basal (21.74 ± 0.65 mEq/L)- HCO3 fin (19.09 ± 0.78 mEq/L) p < 0.001.
Lactato
Los valores de lactato oscilaron en todas las mediciones de 0.6 a 3.5 mmol/L. En la medición basal se observa que todos los pacientes se encontraban dentro del rango de los valores de referencia (0.5-2 mmol/L). En la Figura 5 se observa una tendencia en aumento de los valores de lactato con el paso del tiempo, en las primeras dos horas el aumento fue de 0.31 mmol/L: lactato basal (0.97 ± 0.29 mmol/L)- lactato 2 h (1.28 ± 0.48 mmol/L) p < 0.001. En las siguientes dos horas el aumento fue de 0.41 mmol/L: lactato 2 h (1.28 ± 0.48 mmol/L)- lactato 4 h (1.69 ± 0.62 mmol/L) p < 0.001. En la última medición hubo un aumento de 0.61: lactato 4 h (1.69 ± 0.62 mmol/L)- lactato fin (2.3 ± 0.79 mmol/L) p < 0.001. De manera general, los valores de lactato tuvieron un aumento de 1.33 mmol/L: lactato basal (0.97 ± 0.29 mmol/L)- lactato fin (2.3 ± 0.79 mmol/L) p < 0.001. Estos valores permitieron identificar que a las dos horas comenzó a elevarse el lactato, y al final del procedimiento el 60% de los pacientes tenía valores arriba del rango de referencia (> 2 mmol/L).

PaO2
Los valores de la PaO2 fueron los que mayor dispersión presentaron de todas las variables estudiadas. Los valores oscilaron entre 91-350 mmHg en todas las observaciones. La PaO2 sólo tuvo diferencias estadísticamente significativas en la medición a las 2 h con una disminución, conservando sus valores sin diferencias hasta la última medición. PaO2 basal (255.3 ± 0. 64.3 mmHg)- PaO2 2 h (207.4 ± 68.1 mmHg) p < 0.001.
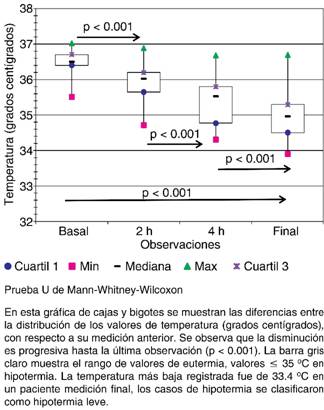
Temperatura
Los cambios en la temperatura presentaron una disminución progresiva, iniciando en promedio de 36.05 ± 0.34 oC en la medición basal, y hasta 34.55 ± 0.79 oC en la medición final p < 0.001, lo que representa una pérdida en promedio de -1.5 oC.
En la Figura 6 se observa la tendencia a la baja en las mediciones de la temperatura durante el transoperatorio, en las primeras dos horas: Tem basal (36.04 ± 0. 0.34 oC)- Tem 2 h (35.44 ± 0.43 oC) p < 0.001. En las siguientes dos horas: Tem 2 h (35.44 ± 0.43 oC)- Tem 4 h (34.89 ± 0.68 oC) p < 0.001. En la última medición: Tem 4 h (34.89 ± 0.68 oC)- Tem fin (34.55 ± 0.79 oC) p < 0.001. Estos valores fueron recodificados a valores de temperatura > 35 oC como eutérmico, y ≤ 35 oC en hipotermia, la temperatura más baja fue de 33.4 oC, por lo que los casos de hipotermia se clasificaron como hipotermia leve. Fue notable el progreso de la hipotermia en los pacientes alcanzando a las cuatro horas el 60% (18) y en la medición final de 83.3% (25).
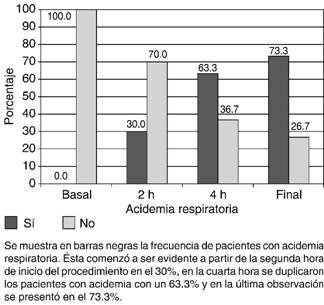
Acidemia respiratoria
La frecuencia de pacientes que presentaron acidemia respiratoria fue operacionalizada en valores de PaCO2 > 35 mmHg y pH < 7.35 según los valores calculados para la Ciudad de México16. En la Figura 7, se observa que la acidemia respiratoria se presentó a partir de la segunda hora del inicio del procedimiento en el 30% (9), en la cuarta hora se duplicaron los pacientes con acidemia con un 63.3% (19) y en la última observación se presentó en el 73.3% (22).
Mecanismo compensatorio (frecuencia respiratoria)
La frecuencia respiratoria, medida en número de respiraciones por minuto, fue incrementando conforme aumentaba el tiempo quirúrgico p < 0.001. En la Figura 8 se muestran los valores categorizados de acuerdo con los valores de referencia para la frecuencia respiratoria, en dos grupos; frecuencias en rangos de 11-20 rpm, y en mayores de 20 rpm.
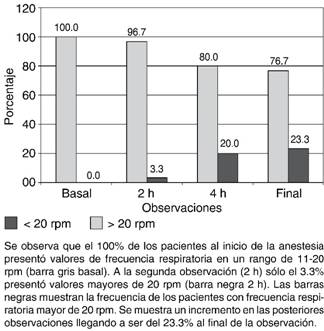
Figura 8: Categorización de la frecuencia respiratoria en las diferentes observaciones realizadas n = 30.
Las frecuencias observadas indican que el 100% (30) de los pacientes al inicio de la anestesia presentaron valores de frecuencia respiratoria en un rango de 11-20 rpm (barras gris claro). A la segunda observación (2 h) sólo el 3.3% (1) presentó valores mayores de 20 rpm (barra negra). El grupo de pacientes con una frecuencia respiratoria mayor de 20 rpm fue incrementándose en las posteriores observaciones, llegando a ser del 23.3% (7) al final de la observación.
La saturación de oxígeno tuvo valores por arriba de 97.7% en todas las mediciones, a excepción de un caso, donde la saturación de oxígeno fue de 95.6% en la medición final.
Discusión
La cirugía asistida por robot actualmente se utiliza en el tratamiento de cáncer de próstata; sin embargo, esta aplicación seguirá en aumento con una extensión a otras especialidades diferentes de la urología. Como anestesiólogos, debemos mantenernos al día con los avances tecnológicos quirúrgicos y conocer sus probables efectos para estar preparados y ofrecer un mejor cuidado de la anestesia en este tipo de pacientes. Es esencial que los anestesiólogos sean plenamente conscientes de los retos provenientes con el uso del robot, ya que hay que tomar en cuenta la posición de Trendelenburg profunda, el capnoperitoneo y el prolongado tiempo quirúrgico.
En este estudio se observó que el tiempo quirúrgico promedio fue de 326.7 ± 77.4 min, con estos resultados podemos observar que la curva de aprendizaje de los cirujanos urólogos en nuestro hospital aún no se supera, a pesar de que a la fecha en la que se concluyó esta investigación se habían realizado 169 prostatectomías. Incluso en los primeros 55 casos reportados en nuestra institución por Gill-Villa et al.5 en el 2015, el tiempo quirúrgico medio fue menor: 270 minutos; sin embargo, a diferencia de Gill-Villa et al.,5 nuestros resultados de los tiempos quirúrgicos incluyen medidas de dispersión que permiten evaluar el grado de heterogeneidad de los valores de los tiempos, o también se puede inferir que los resultados obtenidos están relacionados con un nuevo equipo quirúrgico en curva de aprendizaje.
Los tiempos anestésicos no son reportados en la literatura con la misma frecuencia que los quirúrgicos; en esta investigación se tuvieron valores anestésicos promedio de 377.3 ± 67.9 min con tiempo quirúrgico promedio 326.7 ± 77.4 minutos, con una diferencia entre los tiempos anestésicos y quirúrgicos en promedio de 53.6 ± 10.6 minutos, a diferencia de lo reportado por Meininger et al.,17 quienes reportaron sus tiempos anestésicos en prostatectomías asistidas por robot de 724.3 ± 93.6 minutos, con un tiempo quirúrgico promedio de 591.7 ± 85.8 minutos, teniendo una diferencia de 132.6 ± 7.8 minutos entre los tiempos quirúrgicos y los anestésicos; es decir, nuestro servicio de anestesia prepara, coloca adecuadamente al paciente, monitoriza, induce, intuba, emerge y extuba en menos del 50% del tiempo del citado estudio. Por lo tanto, los tiempos anestésicos podrían disminuir conforme aumente la habilidad del cirujano, ya que estos tiempos dependen del tiempo quirúrgico.
Es necesario recurrir al uso de capnoperitoneo en procedimientos laparoscópicos para una visualización adecuada del campo quirúrgico; normalmente, las presiones se ubican en la franja de los 12-15 mmHg y el CO2 es el gas utilizado más a menudo. La insuflación peritoneal hasta presiones intraabdominales superiores a 12 mmHg induce alteraciones significativas hemodinámicas. Meininger et al.17 estudiaron los efectos cardiopulmonares en una situación de posición de Trendelenburg profunda más uso de capnoperitoneo, específicamente relacionados con procedimientos urológicos robóticos. En nuestra investigación el capnoperitoneo tuvo variaciones a lo largo de la cirugía, se observó que a partir de la segunda hora el capnoperitoneo comenzó con un aumento progresivo, probablemente en relación al cirujano para obtener una mejor visión del campo quirúrgico con el consecuente incremento de la presión intraabdominal, provocando con esto cambios el equilibrio ácido-base.
El quirófano del robot Da Vinci se mantiene a una temperatura baja para el adecuado funcionamiento del robot, pero la pérdida de temperatura corporal en el paciente durante el procedimiento fue decreciendo paulatinamente, por lo que los pacientes salieron del quirófano con una hipotermia leve en un 83.3%; en este sentido, se considera que dentro de los protocolos de atención anestésica se incluyan medidas de protección de la hipotermia para que este factor no influya en la homeostasis. La hipotermia puede ocurrir debido al tiempo quirúrgico prolongado y debe tratarse agresivamente con calentadores de líquidos, mantas de calentamiento y colchones.
El volumen tidal presentó disminución relacionada con el mantenimiento de la presión inspiratoria pico, este valor no excedió los 35 cmH2O en ningún paciente. Con los resultados de esta investigación apoyamos lo descrito por Meininger et. al.17 y Murga Velásquez,18 quienes mencionan que en la cirugía robótica son necesarios la monitorización y el análisis gasométrico frecuente, principalmente para conocer y controlar la aparición de acidosis respiratoria. Meininger et al.,17 en su estudio de 15 casos del 2002, reportaron que la PaCO2 aumentó durante los 90 minutos iniciales al uso de capnoperitoneo y alcanzó una meseta que fue significativamente más alta que la medición basal y se mantuvo constante durante toda la operación. En nuestra investigación, el aumento fue progresivo en cada una de las mediciones, llegando a presentarse acidemia respiratoria a partir de la segunda hora, la frecuencia respiratoria no se asoció con la presentación de acidemia. Los cambios gasométricos son en sí una complicación en la cirugía robótica, el estudio de los factores que influyen en estos cambios gasométricos también fue analizado por Menekse Oksar et. al.19 que de manera prospectiva lo analizaron en 16 casos de cistectomía robótica, en condiciones similares de técnica posicional de Trendelenburg profunda y uso de capnoperitoneo, en cirugías con mayor tiempo quirúrgico: 475 ± 99.50 min. Menekse Oksar et. al.19 compararon los cambios gasométricos de seis tomas realizadas, con base en cambios de posición del pacientes y la instalación o no del capnoperitoneo, a diferencia de nuestra investigación, donde las tomas de las muestras se realizaron con base en el tiempo. En su investigación, en la quinta toma de muestra, los niveles de lactato en pacientes con un pH < 7.35 fueron significativamente más bajos, en comparación con aquéllos con un pH > 7.35, y en esta investigación los niveles de lactato no presentaron diferencias estadísticas cuando se evaluaron de acuerdo con los niveles de pH < 7.35 o pH> 7.35. El aumento de la PaCO2 fue el factor gasométrico que mayor influencia tuvo para la presentación de un pH < 7.35 a partir de la segunda medición y hasta la última.
Como parte de los cuidados del equipo de anestesia se incrementa la frecuencia respiratoria obteniendo mayor ventilación por minuto durante la posición de Trendelenburg con capnoperitoneo, con el objetivo de disminuir la PaCO2. A pesar de que se incrementó la frecuencia respiratoria, el aumento estadísticamente significativo se dio hasta la segunda medición; posteriormente, no se presentaron diferencias en los valores promedio de la frecuencia respiratoria con respecto a los valores de pH.
La presencia de acidemia se determinó al final de la operación, los aumentos de la frecuencia respiratoria fueron el resultado de nuestros esfuerzos para controlar la acidosis respiratoria; sin embargo, ésta se presentó en el 73.3%. La acidemia presenta un componente multifactorial; sin embargo, en esta investigación se relacionó con la hipercapnia encontrada. Otros factores como la hipotermia leve e incremento de lactato no tuvieron diferencias estadísticas.
El HCO3 tuvo disminuciones hasta las cuatro horas y, después de las cuatro horas los valores de HCO3 se mantuvieron sin cambios. Sólo un paciente presentó valores de 17 mEq/L en las 4 h. Estos valores no influyeron en el pH cuando se analizaron por pH < 7.35 o pH > 7.35, a diferencia de Menekse Oksar et. al.,19 cuyo estudio presentó acidosis metabólica relacionada con los valores de pH, sus pacientes incluso necesitaron corrección con infusiones de bicarbonato.
Conclusión
Los riesgos anestésicos de la cirugía robótica se asocian en gran medida con la duración de los tiempos quirúrgicos. En esta investigación se demostró que las cirugías con tiempos mayores de cuatro horas implican una insuflación prolongada de dióxido de carbono (CO2) aunado al tiempo de posicionamiento, lo que resulta en compromiso respiratorio, que es evidenciado en alteraciones gasométricas después de las cuatro horas del transoperatorio y, a pesar de nuestros esfuerzos por mantener una normocapnia, el paciente terminó con acidemia respiratoria.

