











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
La electroencefalografía (EEG) es una técnica no invasiva para el estudio de la actividad eléctrica del cerebro, tanto en sujetos sanos, como en pacientes que padecen epilepsia, Parkinson u otras enfermedades [1,2]. Es bien sabido que el cerebro consiste en dos hemisferios, los cuales se subdividen en cuatro lóbulos (Frontal, Parietal, Temporal, Occipital) y la corteza cerebral, la cual es una capa de tejido gris donde se producen señales espontáneas, conocidas como ritmos. Éstos se encuentran ubicados en ciertas bandas de frecuencia, y dependiendo de la actividad que se esté realizando pueden ser registrados, a través de sistemas EEG [1-4]. Para referirse a los ritmos se usan letras griegas; siendo los más comunes delta, theta, alpha y beta. Cuando se registran las señales cerebrales éstas son acompañadas por distorsiones fisiológicas (producidas por el sujeto/paciente en estudio) o técnicas (producidas por el sistema de medición). Entre las fisiológicas están: Movimientos oculares, parpadeos, movimientos musculares, latido cardiaco, entre otras. En cuanto a las distorsiones técnicas, la más común es la que produce la línea de alimentación, que puede ser de 50 o 60 Hz, dependiendo del área geográfica en donde se realice la medición [5-7]. Generalmente, las señales contaminadas con distorsiones son filtradas usando filtros pasa-bajas o pasa-bandas, o mediante técnicas más complejas como la de análisis de componentes independientes (ICA, por sus siglas en inglés) para obtener una señal limpia a ser analizada posteriormente, como se describe en [6,8-10]. En cualquier caso, la idea es obtener una señal cerebral limpia para continuar con su análisis y procesamiento. En el presente trabajo, sin embargo, se utilizan cierto tipo de distorsiones fisiológicas (parpadeos), las cuales son usadas como información de entrada para mover el prototipo de silla de ruedas, en forma remota. Para ello se ha desarrollado un circuito que permite la interfaz entre los parpadeos y el prototipo de silla de ruedas para que, dependiendo del número de parpadeos, éste se pueda desplazar hacia adelante o atrás; además, se utilizan los niveles de atención para detener la silla. La importancia de desarrollar este tipo de dispositivos es que son de gran ayuda a las personas que padecen una discapacidad motriz, en ambas extremidades, y que solamente son capaces de mover los músculos faciales y los ojos. Las personas con este problema, tienen una fuerte dependencia de las personas más cercanas a ellos, y por ende, tienen poca autonomía.
Existen en el mercado sillas de ruedas acompañadas con exoesqueletos que ayudan a tener una mejor calidad de vida de las personas con discapacidad motora. Un ejemplo de estos es ROKI, el cual es un aparato que se coloca en las piernas de las personas con discapacidad, dándoles soporte para levantarse y volver a caminar. De esta manera sirve como terapia de rehabilitación. Tiene un peso de 13 kg, aproximadamente (detalles de su funcionamiento se muestra en la publicación de Milenio [11]). Este tipo de dispositivos resultan útiles para personas con problemas motores en sus extremidades inferiores, pero que no presentan disfuncionalidad en sus miembros superiores, pudiendo así cargar ellos mismos el exoesqueleto y reincorporarse a su vida cotidiana después de unos días de terapia. No se requiere ningún entrenamiento del sistema de control; sin embargo, su costo resulta poco accesible para quienes han perdido movilidad en sus miembros inferiores.
Como se mencionó anteriormente, el presente trabajo presenta un prototipo de silla de ruedas que tiene como finalidad ayudar a personas con discapacidad en miembros superiores e inferiores basándose en una interfaz cerebro-computadora (Brain-Computer Interface, BCI, en inglés) con la cual se puede dirigir el prototipo de silla de ruedas usando el movimiento de los ojos (parpadeos).
Generalmente, las interfaces cerebro computadora usan señales evocadas en las que una vez que se hace una extracción de propiedades de las señales, se hace una clasificación de las mismas y posteriormente mediante algoritmos específicos se toma una decisión para poder controlar algún dispositivo. Todo ello conlleva un entrenamiento del sujeto/paciente en estudio para que los algoritmos se adapten a sus propias señales. Esto requiere de tiempo y de ajuste de parámetros para que el sistema BCI se adapte a cada sujeto/paciente, como en Wolpan y otros [12,13]. En Pantech solutions [14], se describen algunos proyectos en donde la diadema MindWave Mobile de Neurosky[15], la cual cuenta con un electrodo frontal y uno de referencia y misma que se usa en el presente trabajo, es utilizada para controlar diversos dispositivos a través de las señales de atención y meditación que el electrodo capta. Una aplicación más usando esta diadema se presenta en Calderón Martínez et at [16], en donde este tipo de BCIs no requieren de entrenamiento previo de los sujetos que la usen, lo cual representa una ventaja en tiempo y complejidad. Sin embargo, en este caso, para mover al carrito hacia la derecha, éste debe moverse primero a la izquierda con dos parpadeos, luego otros dos parpadeos regresan las llantas en posición recta y finalmente con otros dos parpadeos se mueve a la derecha. Esto podría ser una desventaja si se quiere que el carrito se desplace hacia la derecha en cierto momento y éste no puede ser dirigido inmediatamente sino hasta que la secuencia antes mencionada sea ejecutada.
En el trabajo de Yan Zhi [17], se realiza la caracterización de la señal de parpadeo para usarla como una toma decisión, para posteriormente usar el módulo TGAM del dispositivo Neurosky y realizar el desplazamiento del carro. En el presente trabajo, para evitar el entrenamiento del sistema y contrarrestando la desventaja antes mencionada, se usan los parpadeos para dirigir un prototipo de silla de ruedas hacia enfrente y atrás, y los niveles de atención para detenerlo, teniendo en cuenta un determinado número de paquetes de datos, enviados a través de la diadema usada. De esta manera, los movimientos se realizan casi en forma inmediata y son independientes uno de otro.
En la siguiente sección se presenta la caracterización de las señales usadas para la BCI propuesta. Posteriormente, se describe el sistema como tal, así como los resultados obtenidos y la discusión de los mismos. Finalmente, se enuncian las conclusiones y lo que se puede hacer en un futuro.
Movimientos oculares verticales
Los movimientos oculares verticales son movimientos naturales en las personas (conocidos también como parpadeos), los cuales se producen cuando se abren y cierran los ojos y son registrados por el EEG. Como se mencionó anteriormente, este tipo de movimientos pertenecen a la categoría de artefactos o distorsiones fisiológicas y se registran tanto en personas sanas como en personas enfermas, como muestran Tatum IV et al en [5] e Ille en [6]. Los parpadeos pueden ser fácilmente reconocidos debido a que tienen gran amplitud y se observan en el EEG principalmente en los electrodos frontales. Este tipo de distorsiones se reflejan en las bandas delta y theta, y, generalmente, son eliminadas, ya que se consideran señales de interferencia que afectan la medición. Cabe mencionar que existen diferentes métodos para eliminar este tipo de distorsiones, como por ejemplo aplicando una combinación de ICA con un filtro de tipo Wiener como lo describen Heute y Santillán en [18]. Sin embargo, en este trabajo, son los parpadeos las señales que se usarán para desplazar el prototipo de silla de ruedas. De esta manera, la persona que desplazará el prototipo usando la diadema, no requiere de entrenamiento para poder mandar alguna instrucción a cualquier dispositivo externo, como se hace comúnmente en las interfaces cerebro-computadora. Esto representa una ventaja en cuanto al tiempo de uso y control del dispositivo. Además, los parpadeos entre los diferentes sujetos no presentan cambios sustanciales, por lo que cualquier persona que presente alguna discapacidad de movimiento de sus extremidades puede usarlo y con el uso de sus ojos puede lograr mover o controlar algún dispositivo en forma remota.
Caracterización de las señales
Como primer paso, previo al desarrollo del algoritmo para mover el prototipo de silla de ruedas, se caracterizaron las señales provenientes de la diadema MindWave Mobile de Neurosky. Dicha diadema consta de un electrodo frontal y uno de referencia (posicionado en el lóbulo de la oreja). El electrodo es capaz de registrar las ondas cerebrales delta, theta, alpha, beta y gama (3-100 Hz), con una frecuencia de muestreo de 512 Hz. Además, registra los niveles de meditación y atención, y cuenta con un módulo Bluetooth para lograr la comunicación con la computadora o con algún otro dispositivo.
Para conocer las características de las señales que proporciona la diadema de Neurosky, se realizaron pruebas con 10 sujetos (4 mujeres, 6 hombres) de un rango de edad de 20 a 35 años, como se observa en la Tabla 1. Cabe mencionar que todos los sujetos de prueba otorgaron su consentimiento informado para poder realizar las pruebas.
Tabla 1. Registro de sujetos para caracterizar la señal.
| REGISTRO DE SUJETOS PARA CARACTERIZAR LA SEÑAL | |||
|---|---|---|---|
| EDAD | #SUJETOS | #MUJER | #HOMBRE |
| 20 años | 1 | 0 | 1 |
| 23 años | 2 | 1 | 1 |
| 25 años | 1 | 0 | 1 |
| 27 años | 1 | 1 | 0 |
| 29 años | 2 | 1 | 1 |
| 31 años | 1 | 0 | 1 |
| 33 años | 1 | 0 | 1 |
| 35 años | 1 | 1 | 0 |
Siguiendo el mismo protocolo, a cada sujeto se le pidió que realizara lo siguiente:
Ponerse en posición cómoda y relajada.
Realizar parpadeos normales.
Realizar parpadeos provocados o forzados (considerando parpadeos rápidos y parpadeos con más duración de lo usual).
Realizar movimientos de ojos a la izquierda y derecha.
Realizar movimientos de cabeza (izquierda, derecha, arriba, abajo).
Realizar gestos (fruncir el ceño, levantar cejas, fruncir nariz y fingir sonrisa).
Los parpadeos normales son los que se realizan de manera natural, con una amplitud promedio de 800x10-6 V y una duración de aproximadamente 0.3s. Por otro lado, los parpadeos provocados o forzados son aquéllos que se realizan voluntariamente cerrando los ojos con mayor fuerza y duración que los parpadeos normales.
Se utilizó el software Open Vibe[19] para el registro de las señales obtenidas con la diadema MindWave Mobile de Neurosky. Para analizar los datos adquiridos se utilizó el lenguaje de programación MATLAB, con el cual se caracterizaron las señales registradas (amplitud y duración de los parpadeos).
Se realizaron pruebas como las de movimiento de cabeza, movimientos horizontales de ojos y gestos, con la finalidad de caracterizarlas y evitar una falsa detección de parpadeos forzados. Dichos movimientos son los que más pueden incidir o afectar la medición.
Asimismo, para caracterizar los niveles de atención de los sujetos de estudio, se les pidió concentrarse en algo, mirar un punto fijo y hacer respiraciones profundas.
En la Figura 1 se muestra un ejemplo de las señales registradas para su caracterización. Como se observa en la Figura 1a, el parpadeo normal, mostrado entre los segundos 4 y 6, tiene una duración aproximada de 0.2s y una amplitud de 800x10-6V. Los parpadeos forzados, mostrados en la Figura 1b, se presentan en los primeros 2 segundos, entre los segundos 6 y 10 y entre los segundos 14 y 16. En los tres casos, la duración promedio es de hasta 0.4s, y su amplitud es de hasta 2000x10-6V. La Figura 1c presenta movimientos horizontales de ojos en los primero dos segundos, entre los segundos 10 y 12 y entre los segundos 14 y 16. Su morfología es parecida a los parpadeos normales, pero de menor amplitud (aproximadamente 600x10-6V) y mayor duración (0.3s). En la Figura 1d se grafica el movimiento de cabeza, el cual se observa entre los segundos 2 y 4, teniendo una amplitud mayor de poco más de 900x10-6V y una duración de 0.6s. Finalmente, en la Figura 1e se presentan los gestos producidos por el sujeto en estudio. En este caso, los gestos son observados a lo largo de los 16s, con una amplitud de hasta 2000x10-6V. Dadas todas estas características, se puede observar que los parpadeos forzados tienen una mayor amplitud comparada con los parpadeos normales, movimientos horizontales de ojos y movimientos de cabeza; y pueden tener una amplitud similar con los gestos. Sin embargo, dada la duración de dos o tres parpadeos forzados (mismos que son usados para mover el prototipo hacia adelante o hacia atrás), es distinta que la de los gestos, por lo que con ello se evita tener una falsa detección.
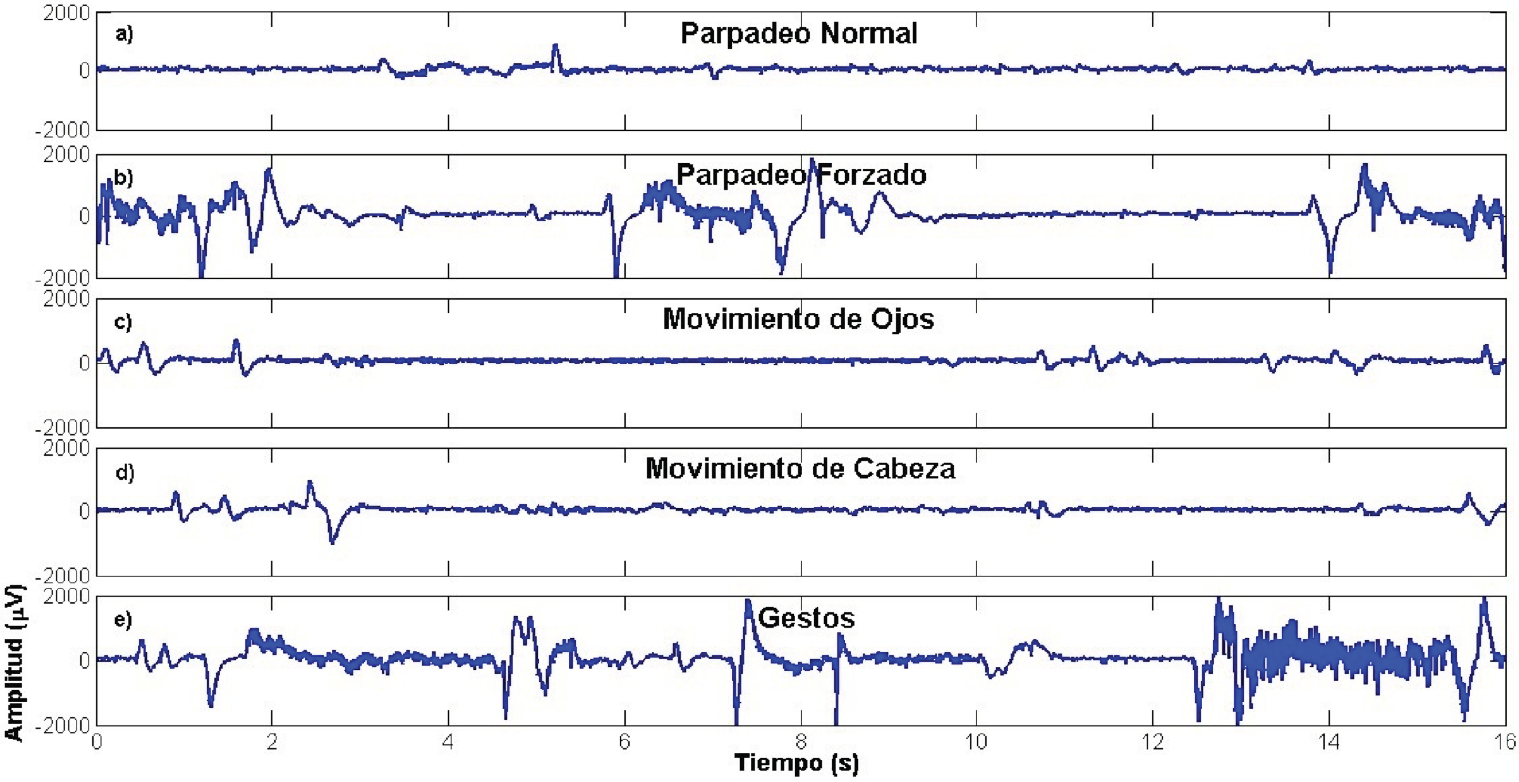
Figura 1. Señales obtenidas de un sujeto con la diadema MindWave Mobile de Neurosky: a) Parpadeo normal; b) Parpadeo forzado; c) Movimientos horizontales de ojos; d) Movimientos de cabeza; e) Gestos.
La tarjeta Arduino cuenta con ciertos protocolos para la lectura de las señales EEG provenientes de la diadema MindWave Mobile de Neurosky, el cual las clasifica de la siguiente manera:
1x10-6-50x10-6V: Niveles normales.
50x10-6-80x10-6V: Niveles de Atención o Meditación.
80x10-6- 240x10-6V: Parpadeos.
240x10-6-255x10-6V: No hace contacto la diadema.
Se analizaron y compararon las mediciones de los parpadeos en Arduino con los datos recopilados con Open Vibe. En la Figura 2a se muestra la señal del electrodo. Entre los segundos 15 y 20, así como entre los segundos 30 y 35, se observan parpadeos forzados. Cuando la señal del electrodo muestra un valor de hasta 2000x10-6V, la señal de detección de parpadeos forzados (Figura 2b), alcanza un valor de hasta 240x10-6V, que, de acuerdo a la clasificación anterior corresponde a un parpadeo. La señal correspondiente a la detección de los parpadeos es la que se considera para el algoritmo propuesto y descrito en la siguiente sección.
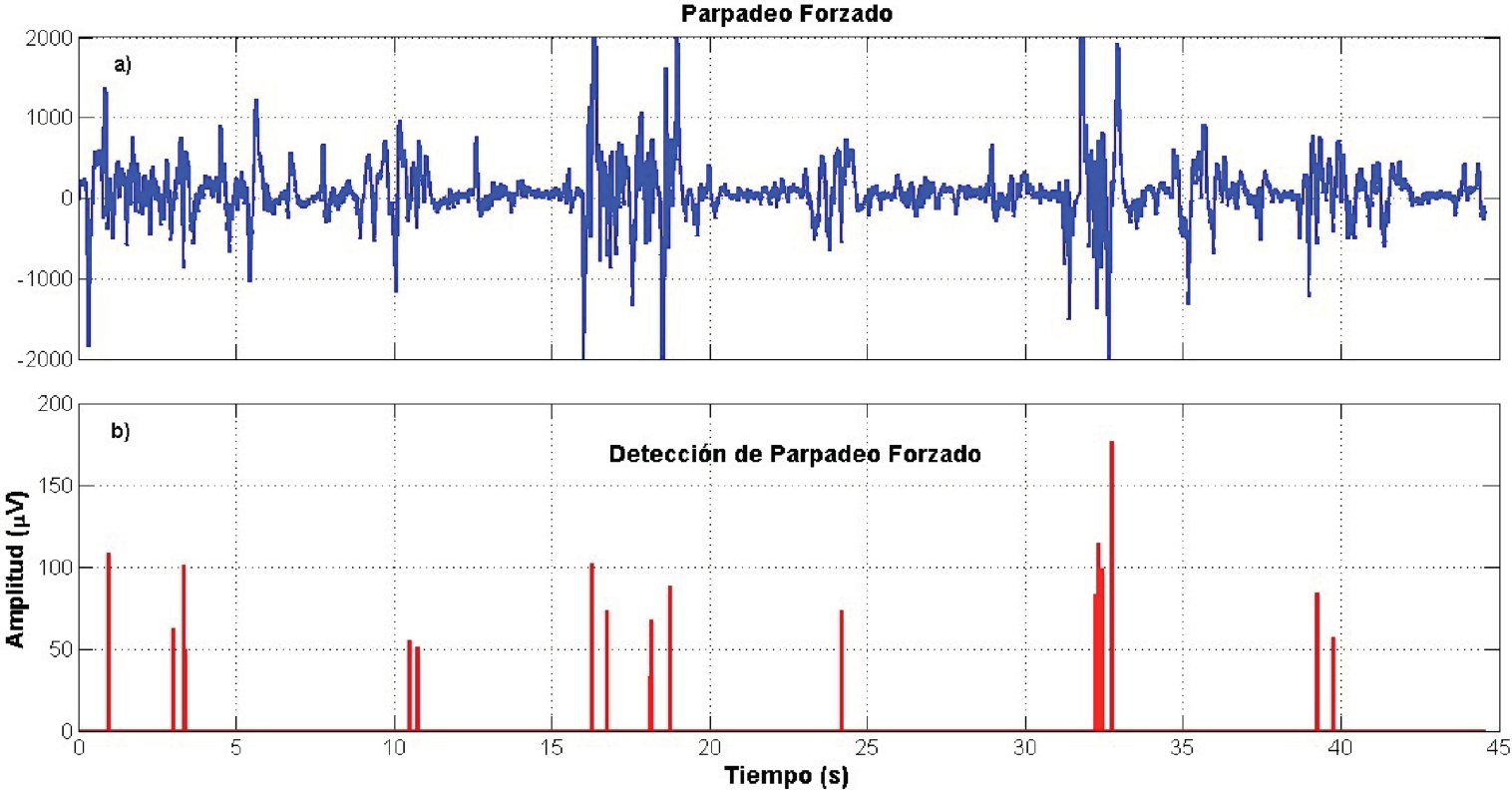
Figura 2. Señal de un sujeto obtenida con la diadema MindWave Mobile de Neurosky: a) Parpadeo forzado; b) Detección de parpadeo forzado.
La duración de los parpadeos, por su parte, está dada por una función de Arduino establecida por Neurosky, la cual muestra el tiempo de recepción de datos. En este caso, se hace uso de ella para determinar la duración de un parpadeo forzado. Se realizaron las pruebas mencionadas anteriormente (parpadeos normales, forzados, movimientos horizontales de ojos, movimientos de cabeza y gestos) a los 10 sujetos y se obtuvo el promedio de amplitud y duración entre todos ellos.
A su vez se corroboró la presencia de parpadeos normales y forzados mediante el cálculo de la varianza y desviación estándar de las señales.
De esta forma se pudo determinar la amplitud y duración promedio de los parpadeos forzados, tomando en cuenta las amplitudes y duración que provee Arduino. Analizando los datos se concluyó que un parpadeo forzado válido tiene una amplitud de 85x10-6V a 240x10-6V y una duración promedio de 0.4s (un parpadeo) a 1.2s (3 parpadeos).
De acuerdo a la señal del electrodo de la Figura 2a, entre los segundos 15 y 20 se muestran dos parpadeos forzados. En la Figura 2b, en esos mismos segundos se observan 4 líneas, indicando que se han detectado 4 parpadeos. Sin embargo, solamente 2 de las 4 líneas que se muestran son considerados como parpadeos forzados válidos de acuerdo a la clasificación previamente mencionada.
Descripción del sistema
Una vez caracterizadas las señales a utilizar, éstas se usarán para desplazar el prototipo hacia adelante o hacia atrás. Además, se usarán los niveles de atención para detener el prototipo. La Figura 3 muestra el diagrama a bloques que representa gráficamente la secuencia de cómo está conformado el sistema o la interfaz cerebro-computadora.

Primeramente, se utiliza la diadema MindWave Mobile de Neurosky para hacer el registro de la actividad eléctrica del cerebro. Como se mencionó anteriormente, con dicha diadema es posible detectar también los parpadeos. Para la adquisición de los datos, se usó una tarjeta Arduino Uno de la marca ATmega328 descrita en [20], que es una tarjeta microcontrolador con un hardware y software flexible, de lenguaje C para su programación (Arduino Programming Language y Arduino Development Environment). Para el presente trabajo se usó un programa base que Neurosky proporciona de su dispositivo MindWave en Arduino Uno, el cual se basa en usar los niveles de atención registrados con la diadema para encender una serie de 10 LEDs. Se instrumentó un circuito electrónico, el cual se muestra en la Figura 4, que incluye un módulo bluetooth HC-05 para la recepción de datos, un dispositivo L293D, el cual es un puente H dual para el doble giro del motor y cuatro LEDS indicadores, los cuales se encenderán dependiendo del número de parpadeos forzados que se contabilicen o si los niveles de atención alcanzan cierto umbral. El prototipo se accionará de la siguiente manera:
1 parpadeo forzado válido, hay una detección de un parpadeo válido e inicia el incremento del número de paquetes (LED amarillo encendido);
2 parpadeos forzados válidos, prototipo avanza hacia adelante (LED verde encendido);
3 parpadeos forzados válidos, prototipo retrocede (LED rojo encendido);
Niveles de atención superior a 50x10-6V, el prototipo se detiene (LED blanco encendido, LEDs restantes, apagados).

El motor utilizado para mover el prototipo, fue un DC R140, el cual cuenta con las siguientes características:
Tensión: 1.5 ~ 3V.
Velocidad (1.5V): 5700 / min.
Velocidad (2V): 8200 / min.
Velocidad (3V): 12400 / min.
Conmutación: Con cepillo.
Torque: 0.07kg / cm.
Consumo con Carga: 0.7A.
Consumo sin Carga: 0.370A.
Se ocupó un juego de 5 engranes para dar una mejor potencia en el desplazamiento del prototipo, como se ve en la Figura 5 y como se describe a continuación:
1 engrane de piñón (0.025m de diámetro);
4 de engranaje recto con piñón (0.025m de diámetro y base 0.015m);
2 ejes.

Todo se montó a una base de madera con 12 tornillos, más un tornillo con tuerca con el cual se sujeta a la parte inferior del prototipo.
Dentro de los protocolos dictados por el sistema Thinkgear[21], el cual es el microchip de Neurosky implementado en la Diadema utilizada, se adquiere la información del sensor de la diadema por un flujo de paquetes, los cuales van de 4 a 173 bytes. El tiempo estimado de la entrega de cada paquete de datos es aproximadamente menos de 7-8x10-3s. En Arduino, es válido un paquete de datos que tiene un valor de 170 bytes con una longitud de carga útil mayor a 32 bytes para iniciar la adquisición.
Usando la tarjeta Arduino, se obtiene la señal del electrodo (SE) global, atención y meditación, las cuales se tomaron en cuenta para la ejecución del prototipo. Se contabilizó el número de paquetes para llevar a cabo las diversas acciones del prototipo: Hacia enfrente, hacia atrás, o detención. Se determinó que el número de paquetes que mejor funciona para el accionamiento del prototipo es de 20.
El sistema de accionamiento del prototipo funciona de la siguiente manera: Una vez colocada la diadema MindWave, así como el electrodo en la parte frontal, se hace la conexión con el Arduino y la computadora (Arduino-diadema) a través de bluetooth y se comienzan a recolectar datos. Como se mencionó, para mover el prototipo se necesitan 2 o 3 parpadeos forzados. Éstos deben estar en un rango de 85 a 240x10-6V de amplitud y tener una duración de entre 0.4 a 1.2s (dependiendo el número de parpadeos). Si ambas condiciones se cumplen, inicia el conteo de parpadeos y paquetes. Con el primer parpadeo válido, el LED amarillo se enciende indicando que el número de paquetes comienza a incrementarse. Este estado permanece así hasta que el número de paquetes es igual a 20, en donde se hace un conteo nuevamente del número de parpadeos válidos. Si el total de éstos es igual a 2, entonces el prototipo avanza hacia enfrente y el LED indicador verde enciende. Si son tres los parpadeos válidos, el LED indicador rojo enciende y el prototipo avanza hacia atrás. Cuando el número de paquetes es mayor a 20, todos los contadores se reinician (contador de parpadeos y de paquetes). El número de paquetes vuelve a incrementarse cuando las condiciones de amplitud y duración se cumplen, repitiéndose el ciclo hasta que la diadema es desconectada. Los niveles de atención se validan cada 20 paquetes, justo cuando se reinician los contadores. Si los niveles de atención están entre 50 y 100x10-6V, el prototipo hará alto. De lo contrario, el prototipo continuará con su ejecución de acuerdo al número de parpadeos previamente determinado.
RESULTADOS
La Figura 6 muestra las dimensiones del prototipo de silla de ruedas propuesto en este trabajo. Tiene un peso de 1.785kg. El material empleado para la parte externa que cubre a los circuitos es acrílico.

En la Tabla 2 se presenta un ejemplo del funcionamiento del sistema, mostrando los resultados obtenidos en la consola de Arduino. Este ejemplo corresponde a la prueba de funcionamiento del prototipo sobre un sujeto cuya edad es de 26 años. En dicha Tabla se observa que el número de parpadeos comienza a incrementarse cuando la amplitud de SE y la duración cumplen las condiciones mencionadas anteriormente, teniendo así el primer parpadeo válido, y por lo tanto el accionamiento del sistema, es decir, el inicio del incremento del número de paquetes, indicado por el encendido del LED amarillo, sombreado en la tabla con color gris. Este estado permanece así durante 20 paquetes. Cuando el número de paquetes es 20, se hace un conteo del número de parpadeos. En este caso, solo es un parpadeo, por lo que no pasa nada (quinta fila de la Tabla 2). Se reinicia el sistema de contadores y el LED amarillo se apaga. El número de paquetes se incrementa nuevamente, se enciende el LED amarillo indicando que se inicia el conteo de los 20 paquetes y cuando son 20 se vuelve hacer el conteo. Ahora el número de parpadeos es dos, por lo que el prototipo avanza hacia enfrente y se enciende el LED verde (sombreado en color verde claro en la Tabla 2). Este estado permanece así hasta que el siguiente bloque de 20 paquetes hace el conteo del número de parpadeos (sombreado en color verde fuerte en la Tabla 2). En este ejemplo, el número de parpadeos es tres, por lo que el LED rojo enciende y el prototipo avanza hacia atrás (sombreado en color rosa claro en la Tabla 2). Todo esto ocurre siempre y cuando en el reinicio de los contadores los niveles de atención estén por debajo de 50x10-6V. De lo contrario, el prototipo se parará y el LED blanco encenderá, como se presenta en la última línea de la Tabla 2.
Tabla 2. Ejemplo de ejecución del sistema para mover el prototipo de silla de ruedas.
| No. Paquetes | SE (μV) | Duración | Parpadeos válidos | Color LEDs | Nivel Atención (μV) |
|---|---|---|---|---|---|
| 0 | 63 | 52 | 0 | 10 | |
| 1 | 127 | 430 | 1 | A | 5 |
| 2 | 54 | 200 | 1 | A | 6 |
| … | … | … | … | … | … |
| 19 | 0 | 0 | 1 | A | 45 |
| 0 | 0 | 0 | 0 | 0 | |
| … | … | … | … | … | … |
| 4 | 179 | 427 | 1 | A | 34 |
| 5 | 54 | 1 | 1 | A | 26 |
| 6 | 146 | 802 | 2 | 43 | |
| … | … | … | … | … | … |
| 19 | 15 | 5 | 2 | A, V | 7 |
| 0 | 0 | 0 | 0 | V | 20 |
| … | … | … | … | A, V | … |
| 3 | 200 | 457 | 1 | A, V | 21 |
| 4 | 169 | 946 | 2 | A, V | 40 |
| … | … | … | … | … | … |
| 7 | 15 | 64 | 2 | A, V | 0 |
| 18 | 198 | 1071 | 3 | A, V | 6 |
| 19 | 3 | 12 | 3 | A, R | 2 |
| 0 | 0 | 0 | 0 | B | 87 |
DISCUSIÓN
Como se mencionó anteriormente, para mover el prototipo se necesitan 2 o 3 parpadeos forzados. Éstos deben estar en un rango de 85 a 240x10-6V de amplitud y tener una duración de entre 0.4 a 1.2s (dependiendo el número de parpadeos). Si ambas condiciones se cumplen, se comienza el conteo del número de parpadeos y el número de paquetes.
Al realizar diferentes pruebas del algoritmo con el prototipo de la silla de ruedas, las respuestas fueron satisfactorias un 80%. Se observó que no todas las personas solían elevar sus niveles de atención de la misma manera, esto con el fin de detener el prototipo.
Un factor que influyó y que probablemente no se tuvo en cuenta en el momento, fue el estrés o nervios del sujeto al manipular el prototipo. Esto ocasionó que en algunos casos se elevara su atención y se detuviera el prototipo sin que se le indicara al realizar las pruebas.
No se requirió de tiempo de entrenamiento, para que las personas pudieran manipularlo, tan solo fue suficiente las indicaciones de colocárselo y hacer parpadeos forzados.
CONCLUSIONES
En el presente trabajo se presentó un prototipo a escala de silla de ruedas que es desplazado hacia enfrente y atrás de acuerdo a cierto número de parpadeos forzados válidos que un sujeto hace usando la diadema MindWave Mobile de NeuroSky. Para detectar el número de parpadeos forzados, se tomó en cuenta su amplitud, su duración y el número de paquetes en los que se hace el registro. Los niveles de atención se usaron para detener el prototipo. Todo el sistema se implementó en Arduino y se usó bluetooth para la comunicación entre la diadema y el sistema mismo.
Este prototipo puede ser robustecido usando otras métricas, tales como la varianza, la curtosis, el exponente de Hurst, que son útiles también en la detección de parpadeos. Asimismo se pretende modificar la forma de detención del prototipo, de tal manera que no sea tan subjetivo.
Además, como siguiente paso, se pretende implementar un algoritmo que permita movimientos a la derecha e izquierda, y a distintas velocidades, así como la implementación de un sistema de control que permita subir y bajar rampas.
Una vez implementado todo lo anterior, se llevará a cabo una etapa de potencia para poder realizar todo el procesamiento en una silla de ruedas real. De esta manera, se cubrirán las necesidades de pacientes que padecen alguna discapacidad en sus extremidades.

