











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Según el censo de población del año 2015 realizado por el INEGI (Instituto Nacional de Estadística y Geografía), el 6% de la población en México presenta alguna discapacidad. De dicha población, el 33% presenta una discapacidad en el miembro superior1. Los programas de salud social son, por regla general, el método principal para promover la recuperación funcional en estos sujetos.
También la OMS (Organización Mundial de la Salud) afirma que la rehabilitación es un proceso que permite a las personas con discapacidad alcanzar y mantener un nivel óptimo de desempeño físico, abarcando un rango amplio de actividades como la fisioterapia2.
La rehabilitación pasiva de brazo es el primer tipo de tratamiento en fisioterapia debido a la espasticidad o al nulo rango de movimiento que pueden presentar los pacientes después de una cirugía de hombro, codo o articulación de la muñeca3 o como consecuencia de alguna luxación4 o resultado de un ACV (Accidente Cerebro Vascular)5. En la actualidad, los movimientos pasivos son usados en el proceso de rehabilitación después de haber sufrido lesiones neurológicas6 y como parte de un protocolo terapéutico. La terapia de rehabilitación pasiva es aplicada cuando el brazo no contribuye ni se opone voluntariamente a dichos movimientos.
El número de casos de discapacidad en el brazo está en constante crecimiento, la duración del tratamiento es larga7 y se requiere de terapeutas calificados para tratarlos. La escasez de terapeutas, la cobertura limitada de los sistemas de salud y la ausencia de servicios capacitados, restringen la rehabilitación completa de los pacientes. Este panorama sugiere que la introducción de robots puede contribuir de manera significativa a la mejora de los resultados de estos programas.
La investigación sobre rehabilitación robótica de las extremidades superiores ha demostrado que la terapia con robots ayuda a recuperar la motricidad de la extremidad afectada8 y también puede mejorar los resultados funcionales9. Por otra parte, existe un déficit de robots de rehabilitación lo suficientemente compactos y potentes para llevar a cabo la flexión y extensión muscular y al mismo tiempo, retroalimentar al paciente y al terapeuta sobre los movimientos realizados buscando motivarlo en entornos clínicos8.
Se ha demostrado en varios estudios que las terapias intensivas y repetitivas mejoran significativamente las habilidades motoras6. Otros estudios han puesto de manifiesto que el aprendizaje motor mejora cuando los pacientes practican una variedad de tareas funcionales10 tales como alcanzar objetos o juegos con estimulación. Existen también reportes que revelan cómo la terapia asistida por un robot, así como la rehabilitación basada en realidad virtual, reducen significativamente el deterioro del brazo8 y mejoran la función motora11 permitiendo la recuperación del miembro afectado12.
Los exoesqueletos son órtesis activas que consisten en un mecanismo estructural externo al cuerpo humano, adaptado para su uso personal, teniendo como característica principal su alta dependencia con respecto a los movimientos de las articulaciones y a los miembros del cuerpo humano13. Estos sistemas también pueden ser definidos como dispositivos biomecatrónicos, donde el sistema está adaptado a la estructura física del cuerpo humano con un control que puede provenir de las señales del cerebro, con sensores conectados a la piel humana y con actuadores con funcionamiento análogo al de los músculos. El conjunto de estos elementos puede actuar como un solo sistema integrado que desarrolla diversas actividades14.
Este artículo tiene dos objetivos; el primero es presentar 4 casos de estudio de rehabilitación pasiva de miembro superior que sean capaces de generar rangos de movimiento funcionales que le permitan al paciente recuperar su autonomía. El segundo objetivo es presentar un exoesqueleto de configuración original como herramienta principal para la rehabilitación a partir de los requerimientos y restricciones que los casos de estudio presentan.
Los estudios realizados sobre sistemas para rehabilitación de miembro superior muestran que los dispositivos robóticos de tipo exoesqueleto que se encuentran en la literatura son montados en sillas de ruedas15, en el suelo16 o en una pared17. Aunque existen investigaciones extensas en el desarrollo de la rehabilitación inteligente y dispositivos para la asistencia de movimientos, un número pequeño de estos desarrollos se ha centrado en el enfoque de rehabilitación pasiva.
El análisis del estado del arte arroja desventajas recurrentes en los exoesqueletos existentes que incluyen: número de grados de libertad y movimientos limitados, estructuras sólidas complejas18, articulaciones actuadas voluminosas y pesadas, complejo tendido de cables usados como transmisiones hacia los actuadores y sensores, etc. Todas estas situaciones indeseables se han considerado para la configuración del exoesqueleto.
Los siguientes exoesqueletos desarrollados para rehabilitación pasiva de miembro superior se distinguen por su originalidad y su desempeño. Se presentan las características más importantes como: número de GDL (Grados De Libertad), tipos de sensores, actuadores usados, sus transmisiones y su capacidad terapéutica:
ETS-MARSE 201119: Exoesqueleto de 7 GDL con capacidad terapéutica para hombro, codo, antebrazo y muñeca. Es controlado por torque y se encuentra montado en el piso.
IntelliArm 200920: Dispositivo para rehabilitación de hombro, codo, antebrazo, muñeca y dedos. Tiene 8 GDL y está montado en una base móvil.
CADEN-7 200721: Exoesqueleto de 7 GDL para la rehabilitación de hombro, antebrazo, codo y muñeca. Se basa en un sistema de poleas.
ARMEO POWER®22: Exoesqueleto comercial para rehabilitación de miembro superior con 7 GDL. Está inmerso en un ambiente integral que motiva al paciente.
Diseño de un prototipo de exoesqueleto para rehabilitación del hombro 201723. Este prototipo cuenta con 3 GDL y se especializa en el hombro, se caracteriza por tener una base ajustable para el tamaño del paciente.
Metodología
La metodología que se empleó consiste en las siguientes etapas: Primero se hace una revisión de las técnicas empleadas para rehabilitación de miembro superior en casos clínicos, así como de observaciones en campo, con el fin de relacionar ciertos ejercicios que pueden ser tratados de la misma forma o tienen el mismo fin. Además, se relacionan las patologías que requieren rehabilitación con los grupos de ejercicios identificados anteriormente, de esta forma se propusieron y caracterizaron 4 casos de estudio. La validación de los casos se hace mediante la adquisición de datos de los ejercicios, la medición se realiza directamente de las articulaciones de individuos que ejecutan protocolos terapéuticos de rehabilitación (movimientos tridimensionales del miembro superior) dirigidos por un terapeuta, para así obtener los rangos de movimientos que cada GDL debe alcanzar. Con la información recolectada de los cuatro casos de estudio se obtuvieron las restricciones y parámetros críticos para desarrollar un exoesqueleto ERMIS (Exoesqueleto de Rehabilitación de Miembro Superior) dedicado a la rehabilitación. Por último, se evalúa el diseño del exoesqueleto mediante su respectivo modelo dinámico, simulando los ejercicios y comparándolos con los rangos determinados por los casos de estudio.
Para definir los casos de estudio se hace una revisión de las principales patologías donde los pacientes presentan rigidez o rango nulo de movimiento en el brazo y necesitan rehabilitación pasiva, siendo las principales las siguientes:
Accidente cerebrovascular: Es una obstrucción arterial del cerebro ocasionando un daño en el control de la zona afectada, lo que trae como consecuencia pérdida del control muscular24.
Esclerosis múltiple: Es una enfermedad autoinmune que destruye o minimiza la cantidad de mielina de las células nerviosas causando que la señal de información del cerebro al músculo se pierda generando rigidez o espasmos musculares en las extremidades24.
Lesión de la médula espinal: Este tipo de lesión impide la comunicación entre las terminales nerviosas y el cerebro24.
Lesión en el plexo braquial: Impide la comunicación entre la médula espinal y el miembro superior, volviéndolo flácido y con falta de movilidad24.
La literatura indica que el tiempo de duración de la rehabilitación para el miembro superior debe ser de 20 a 30 minutos24. En el proceso de rehabilitación pasiva la terapia de ejercicios no debe durar más de 20 minutos ya que una sobreestimulación podría generar una luxación en alguna articulación24. La duración y la frecuencia de las sesiones de rehabilitación dependen del grado de afectación, del tipo de la misma y de la respuesta del paciente.
Con base en los ejercicios observados durante diferentes sesiones de rehabilitación de brazo y en los tipos de movimientos del miembro superior supervisados por terapeutas especialistas, se identifican los siguientes cuatro casos de estudio que abarcan los diferentes ejercicios:
Caso de estudio 1. Serie de ejercicios excluyentes por articulación. Esta metodología de rehabilitación es muy común en las sesiones de terapia. Consiste en realizar uno o dos movimientos anatómicos para estimular las regiones afectadas en repeticiones de 3 a 5 veces.
Los ejercicios agrupados en este caso de estudio tienen como objetivo generar rangos de movimientos funcionales, es decir, atacan directamente la espasticidad. La aplicación de estos ejercicios aumenta el tono muscular cuando existe un rango nulo de movimiento.
Caso de estudio 2. Ejercicio con carga aparente. Estos ejercicios emulan la elevación de un objeto por una persona para depositarlo en algún lugar. Los movimientos que predominan en estos ejercicios son flexo-extensión de hombro, de codo y de muñeca. Estos ejercicios tienen relación con actividades cotidianas realizadas con el miembro superior. La rutina de estos ejercicios consiste en que el terapeuta coloque un objeto en la mano del paciente y posteriormente le estire el brazo por completo, estimulando la flexo-extensión del hombro. Otra variante se da cuando se flexiona y extiende el codo al mismo tiempo que la muñeca, trasladando el objeto de arriba a abajo, de tal forma que el brazo permanece paralelo al eje sagital.
Caso de estudio 3. Activación de la memoria de músculo a través del seguimiento de trayectorias. Una técnica de rehabilitación relativamente nueva es la memoria de músculo24. Consiste en que un agente externo, generalmente un terapeuta, ayuda al paciente a generar los movimientos de alguna tarea cotidiana para que, a través de una retroalimentación del tipo auditivo, somatosensorial o visual, el cerebro del paciente recuerde qué músculos son los que se estimulan durante la ejecución de trayectorias de diversas tareas de la vida real.
Un ejercicio típico para este caso de estudio es colocar al paciente frente a una pared, pizarrón o pantalla donde aparecen trazos de figuras. El terapeuta mueve el brazo del paciente haciéndolo seguir las trayectorias dibujadas con el objetivo de dar una retroalimentación visual. El cerebro interpreta el recorrido a través de lo que observa, creando memorias que le permiten identificar los músculos que debe estimular y que están involucrados durante el seguimiento de dichas trayectorias. Este ejercicio tiene el beneficio de poder acelerar el proceso de rehabilitación25.
Caso de estudio 4. Emulación de rueda de hombro o timón. El timón es un dispositivo mecánico que facilita la rehabilitación de hombro, brazo, codo y muñeca. Una de las ventajas de este dispositivo es que se puede adaptar al tamaño y necesidades de cada paciente. El timón mejora la fuerza muscular, la flexibilidad articular y la coordinación motriz en personas que sufren alguna discapacidad relacionada con la movilidad del brazo24. El ejercicio de timón tiene dos variantes:
Ejercicio A: Se coloca al paciente frente al timón; se sujeta la mano del paciente al mango y el terapeuta hace girar el timón. Esto estimula los movimientos de todo el miembro superior pero principalmente favorece la flexo-extensión del hombro.
Ejercicio B: Para este ejercicio el paciente permanece de pie al lado del timón. Se sujeta la mano al mango del timón y el terapeuta lo hace girar. Esto ejercita la abducción (ABD) y aducción (ADD) del hombro, así como los movimientos de cada complejo articular del miembro superior.
Los ejercicios que se pueden hacer con el timón presentan variantes que pueden depender del rango de giro, de la orientación de la palma de la mano (arriba o abajo) y de la altura del timón con respecto al cuerpo del paciente.
Generación de trayectorias de rehabilitación
Para replicar los ejercicios de rehabilitación pasiva que se aplican en las terapias es necesario caracterizarlos. Existen diversos métodos para poder cuantificar los movimientos de las extremidades humanas26, por ejemplo, los que hacen video grabaciones de puntos reflejantes sobre el cuerpo o escaneos infrarrojos, también aquellos que utilizan sensores ubicados sobre las personas como acelerómetros y giroscopios.
Para caracterizar los ejercicios de los casos de estudio planteados en este artículo, se adquirieron los datos mediante la goniometría, la cual se encarga de medir los ángulos donde se articulan los elementos del miembro al realizar algún movimiento. Es importante resaltar que esta técnica evalúa la posición angular de la articulación en cualquier punto en el espacio24.
En este proyecto se usan potenciómetros con alta linealidad como sensores analógicos de posición angular, estos han sido acoplados a goniómetros convencionales. Para hacer la lectura de un goniómetro se considera una parte fija y una parte móvil, la parte fija es la referencia de la articulación y la parte móvil es el elemento que sigue el movimiento de la articulación. Para la rotación interna-externa del hombro y la pronosupinación de la muñeca se emplearon potenciómetros de anillo, los que se adaptaron para tener un elemento móvil y un fijo. Los potenciómetros permiten hacer una relación voltaje-grados. La ubicación de los goniómetros instrumentados se relaciona con el eje de rotación de cada articulación, la Figura 1 muestra la ubicación de cada uno de los 7 goniómetros instrumentados. Para el movimiento de abducción-aducción se coloca el eje del potenciómetro en el eje de la articulación acromioclavicular (ver elemento 1 Figura 1). Para la flexo-extensión de hombro se ubica el potenciómetro alineado al eje de la articulación glenohumeral (ver elemento 2 Figura 1). El potenciómetro usado para la rotación interna y externa es un potenciómetro de anillo (ver elemento 3 Figura 1) cuyo eje se alinea al eje del húmero. Para la flexo-extensión del codo se coloca el eje de rotación del potenciómetro alineado con el eje de la articulación húmero-cubital (ver elemento 4 Figura 1). Para la articulación radio-cubital encargada de la pronosupinación, se usa un potenciómetro de anillo (ver elemento 5 Figura 1) alineado al eje del brazo. Para la flexo-extensión de la muñeca, el eje del potenciómetro se coloca coincidente al eje de la articulación radio-carpiana (ver elemento 6 Figura 1).Por último para la desviación cúbito-radial se coloca el eje del potenciómetro en la articulación radio-carpiana colocando el elemento móvil sobre el dorso de la mano (ver elemento 7 Figura 1).

Esta red de sensores permite adquirir de manera simultánea la información proveniente de los 7 movimientos angulares del brazo con un tiempo de muestreo de 0.5 s. Para la lectura de los valores se usan las entradas analógicas en un rango de 0 a 10 volts de la tarjeta de adquisición de datos USB 6009 y MATLAB®.
Para ejemplificar el trabajo que se hizo en el muestreo y adquisición de datos en los casos de estudio, se detalla la discretización de la trayectoria del ejercicio con el timón durante una sesión de rehabilitación pasiva. Se colocaron los goniómetros instrumentados alineados con los ejes de rotación de los movimientos anatómicos del brazo y se hizo la lectura de los valores angulares que se fueron presentando al girar el timón como se muestra en la Figura 2. Se comienza el giro desde la parte inferior del timón a 0° del eje vertical y se realiza un movimiento rotatorio ascendente hasta 180°, terminando así la fase 1 del ejercicio. La fase 2 consiste en descender el timón desde la posición de 180° hasta alcanzar la posición de partida en 0°.

En la Figura 3 se muestran las gráficas procesadas por la interfaz en MATLAB® correspondientes a los movimientos de las siguientes articulaciones: flexo-extensión, ABD-ADD, y rotación interna y externa del hombro, así como de la flexo-extensión y pronosupinación del codo, por último la flexo-extensión y desviación cúbito-radial de la muñeca. Las señales fueron discretizadas en 60 puntos durante 20 s. Los datos que se recabaron incluyen la fase 1 que va de 0 a 10 s y la fase 2 de 10 a 20 s. Esto explica por qué la Figura 3 es simétrica con un eje justo a los 10 s.
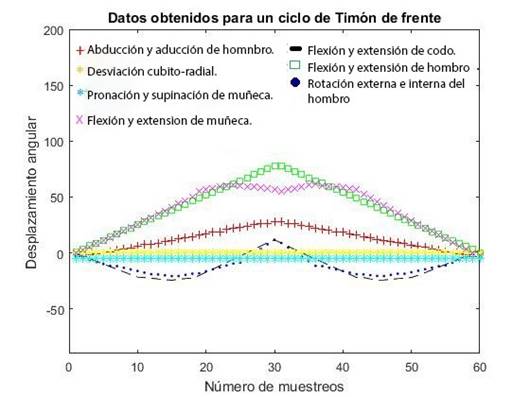
También se observa que las gráficas correspondientes a la desviación cúbito-radial y la pronosupinación prácticamente permanecen con valores constantes de 0°, esto significa que estas articulaciones no presentan cambio en su posición angular a lo largo de toda la trayectoria del ejercicio. Así mismo en la Figura 3 se puede observar que la dinámica de las curvas no presenta cambios abruptos en velocidad excepto cuando termina la fase 1 del ejercicio y esto se debe al cambio de dirección en el movimiento.
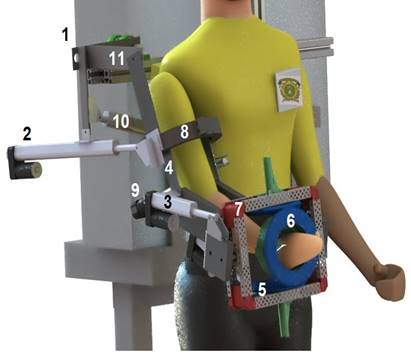
Diseño mecánico del ERMIS
El ERMIS es propuesto de tal forma que garantice funcionalidad para los 4 casos de estudio planteados. Para su diseño y selección de las longitudes de enlace entre el brazo y el exoesqueleto se consideraron las dimensiones de los diferentes segmentos del brazo de una persona adulta de 1.80 m de altura27. El exoesqueleto se considera montado en una base móvil donde el paciente se coloca en bipedestación y la altura de la base es ajustable. La Figura 4 muestra el modelo CAD (diseño asistido por computadora por sus siglas en inglés) del ERMIS, montado en la cara lateral de la parte superior del brazo derecho. El hombro cuenta con 3 GDL: la ABD-ADD (ver elemento 1 de la Figura 4), la flexo-extensión (ver elemento 11 de la Figura 4) y la rotación interna-externa (ver elemento 8 de la Figura 4); estos tres movimientos se logran mediante tres actuadores lineales eléctricos con encoder, como se muestra en los elementos 2, 9 y 10 de la Figura 4. La articulación del codo cuenta con 2 GDL formados por los movimientos de la flexo-extensión (ver elemento 4 de la Figura 4) y por la articulación de pronosupinación (ver elemento 6 de la Figura 4); el codo se flexiona mediante el actuador lineal con encoder que se observa en el elemento 3 de la Figura 4. Por último, los 2 GDL correspondientes a la articulación de la muñeca, uno asociado a su movimiento de flexo-extensión (ver elemento 5 de la Figura 4) y otro para la desviación cúbito-radial (ver elemento 7 de la Figura 4). Los movimientos de la pronosupinación y la flexo-extensión de la muñeca son producidos por un par de motores eléctricos acoplados al conjunto de engranes diferenciales que se muestra en los elementos 5 y 6 de la Figura 4.
Simulación
Con la herramienta Simscape Multibody® de Simulink® de Matlab se importa el CAD del ERMIS para generar el modelo dinámico que contiene las características de masa, momento de inercia, velocidad y aceleración de todos los elementos que forman la cadena cinemática del exoesqueleto. Todo esto esquematizado mediante bloques que pueden representar: cuerpos rígidos (vínculos, engranes y actuadores), articulaciones o relaciones de posición (articulación de rotación, prismática o diferencial). Además, al modelo se le han anexado sensores, actuadores, restricciones, etc.
Los sólidos rígidos importados con sus propiedades se conectaron entre sí siguiendo una cuidadosa selección de sus marcos de referencia dando como resultado la obtención de los modelos cinemático y dinámico del exoesqueleto.
Con el modelo cinemático inverso se logró conocer las posiciones articulares para que la trayectoria del extremo del exoesqueleto corresponda al movimiento efectuado por el timón, la cual se generó a partir de un arreglo compuesto por tres funciones x(t), y(t), z(t) mediante el bloque Signal Builder que les da las características de velocidad y aceleración del ejercicio.
Por otra parte, la dinámica directa del exoesqueleto permitió conocer las fuerzas de cada actuador lineal y los torques de la transmisión diferencial que intervienen en la dinámica deseada a partir de la evolución de las coordenadas articulares obtenidas por la cinemática inversa.
La simulación habilitó la comparación entre las 7 trayectorias simultáneas capturadas del ejercicio de timón a lo largo del brazo con las trayectorias medidas en el modelo dinámico. Cada archivo con los datos adquiridos por articulación se interpoló linealmente y fue importado en la simulación del ERMIS, así se logró cuantificar el error.
Resultados y discusión
En esta sección se discuten los resultados obtenidos para el caso de estudio 4, correspondiente al ejercicio de emulación del timón. La simulación se alimenta con la trayectoria semicircular que equivale al movimiento del timón. Se agregó el CAD de un timón ubicado frente al exoesqueleto para que sirva como referencia.
En la Figura 5 se muestra una secuencia de imágenes de la simulación de la trayectoria de la fase 1 que va de 30° a 180° respecto a la vertical. Las capturas inician en la Figura 5 en un tiempo de 0 s y continúan a intervalos de 1.6 s hasta llegar a la posición que se observa en la Figura 5 con una duración de 10 s.
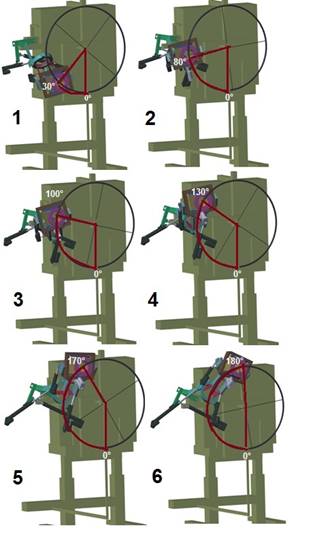
Figura 5 Secuencia de movimiento generadas por la simulación del ejercicio de timón con el exoesqueleto.
En las Figuras 6, 7, 8, 9 y 10 se muestran las dinámicas de la simulación para cada GDL y se comparan con la adquisición de datos experimentales para así poder establecer el error que existe al realizar el ejercicio de timón de frente.
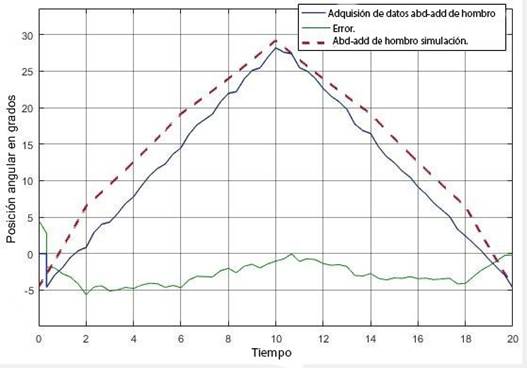


El movimiento de ABD-ADD de hombro ocurre cuando el miembro se aleja o se acerca al eje vertical anatómico28. En la Figura 6 la abducción se realiza cuando las curvas provenientes de la adquisición y la simulación tienen pendientes positivas y la aducción se estimula cuando se realiza el regreso hacia el punto neutro o 0°. Para evaluar la capacidad del ERMIS al seguir las trayectorias del ejercicio del timón en la ABD -ADD, se comparan la amplitud de la curva de 32° proveniente de los datos muestreados contra los 35° provenientes de la simulación. A partir de este comportamiento se calcula el error mostrado en la Figura 6. Para evaluar el caso de estudio 4 emulación de timón, en la ABD-ADD, se compara la amplitud de movimiento anteriormente medida en la adquisición de datos contra los 45° de amplitud de movimiento funcional29 de la misma articulación.
El movimiento de flexo-extensión de hombro es el aumento o reducción del ángulo formado por dos elementos anatómicos del hombro28. En la Figura 7, la extensión del hombro se ejercita cuando las pendientes de las curvas de la simulación y la adquisición de datos son positivas y la flexión aparece cuando las curvas regresan a 0°.
Para evaluar el desempeño del ERMIS siguiendo trayectorias en la flexo-extensión del hombro se comparan la amplitud del movimiento en los datos muestreados de 78° contra la amplitud de movimiento de la simulación de 76°, de esta forma se obtiene el error que aparece en la Figura 7. Para evaluar el caso de estudio 4 en la flexo-extensión del hombro se contrasta la amplitud de movimiento en la adquisición de los datos previamente calculada contra los 80° de amplitud de movimiento funcional29 de la misma articulación.
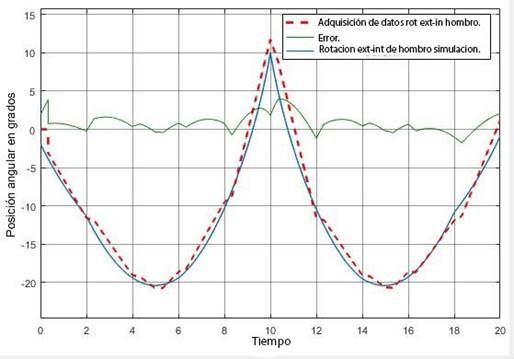
La rotación del hombro es el movimiento del húmero alrededor de su eje longitudinal. La rotación externa del hombro requiere de la sinergia de la abducción28. En la Figura 8 cuando las pendientes de las curvas de la rotación del hombro son negativas se está estimulando la rotación externa y cuando las pendientes son positivas se estimula la rotación interna.
Tanto la amplitud de movimiento de la rotación interna-externa del hombro con los datos muestreados como la obtenida de la simulación tienen una amplitud de 53°, sin embargo, los desfasamientos entre ambas generan la curva del error de la Figura 8. Para evaluar el caso de estudio 4 se compara la amplitud previamente calculada de la adquisición de datos contra los 70° de amplitud del movimiento funcional29.
El movimiento de flexo-extensión de codo es el incremento o reducción del ángulo formado entre el húmero y la unión cúbito-radial28. En la Figura 9 la extensión del codo ocurre cuando las curvas provenientes de la simulación y la adquisición de datos tienen pendientes negativas y la flexión se da cuando las pendientes de las curvas son positivas.
Para evaluar el ERMIS en su capacidad de seguir la trayectoria en el codo, se contrasta la amplitud angular de los datos muestreados de 37° contra la amplitud del movimiento en la simulación de 36°, los desfasamientos entre ambas curvas generan la dinámica de error mostrada en la Figura 9. Para evaluar el caso de estudio 4 en la flexo-extensión del codo se contrasta la amplitud de movimiento en la adquisición de los datos previamente calculada contra los 50° de amplitud de movimiento funcional29 de la misma articulación
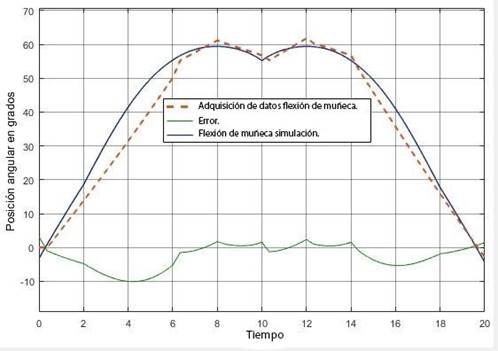
El movimiento de flexo-extensión de muñeca es el incremento o reducción del ángulo formado entre el radio y los huesos carpianos28. En la Figura 10 se observa que la extensión de la muñeca se ejercita cuando las pendientes de las curvas provenientes de la simulación y la adquisición son negativas y la flexión se estimula cuando las pendientes son positivas. La evaluación del ERMIS siguiendo la trayectoria de la flexo-extensión de la muñeca se hace comparando los 61° de la amplitud del movimiento de los datos muestreados contra los de los 66° de amplitud obtenidos de la simulación, la diferencia entre ambas curvas genera la curva del error en la Figura 10. Para evaluar el caso de estudio 4 en la articulación de la flexo-extensión de la muñeca, se contrasta la amplitud de movimiento previamente medida con la red de goniómetros contra los 45° de amplitud del movimiento funcional.
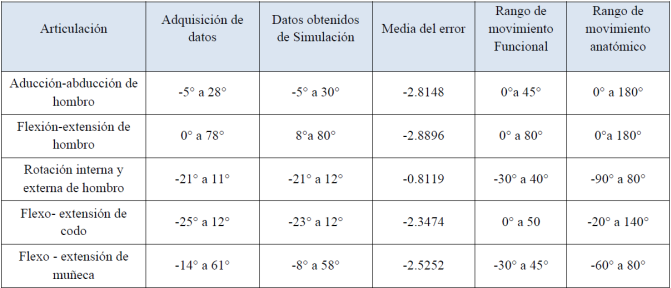
Los resultados se han resumido en la Tabla 1, donde se puede observar la información de cada grado de libertad que participa en el ejercicio, esto incluye: el rango en grados que cubre el movimiento capturado por los goniómetros, el rango de movimiento obtenido de la simulación del exoesqueleto, la dinámica del error que se calculó con base en la desviación estándar, la media del error entre los datos experimentales y la simulación del ERMIS. En las últimas dos columnas se presentan los datos correspondientes a los rangos de movimiento funcionales29 y anatómicos.30
Conclusiones
En este artículo se han identificado 4 casos de estudio para atender la rehabilitación pasiva de miembro superior que incluyen todos sus movimientos anatómicos y funcionales. Se caracterizó el caso de estudio 4 por medio de la obtención de los rangos de movimiento experimentales con una red de goniómetros instrumentados y se confrontaron con la amplitud de movimiento funcional para cada articulación del brazo.
El caso de estudio 4 abarca los siguientes porcentajes de los rangos funcionales: el 71.1% en la ABD-ADD del hombro, el 97.5% de la flexo-extensión del hombro, el 45.7% de la rotación interna-externa del hombro, el 74% en la flexo-extensión del codo y el 100% en la flexo-extensión de la muñeca. Los rangos funcionales son una guía para saber si se cumple con el objetivo principal de la rehabilitación. Los casos de estudio se plantearon para ser complementarios entre sí, el caso de estudio 4 abarca un promedio de 77.7% de rangos funcionales.
El análisis de los casos de estudio estableció un conjunto de requerimientos y restricciones a partir de los cuales se formuló un exoesqueleto para rehabilitación llamado ERMIS validado mediante la simulación de su modelo dinámico ejecutando los ejercicios de rehabilitación asociados a cada caso de estudio. Se compararon las trayectorias obtenidas de la simulación contra los datos de la red de goniómetros con el fin de obtener el error angular presente en cada GDL. Se selecciona los resultados obtenidos del caso de estudio 4 para discutirse ampliamente debido a la complejidad de su ejercicio asociado. Se determinó que ERMIS durante la ejecución del ejercicio de timón cubre los siguientes porcentajes de seguimiento de las trayectorias: el 91.2% del movimiento de ABD-ADD, el 96.2%, de la flexo-extensión de hombro, el 97.4% de la rotación externa-interna de hombro, el 93.6% para la flexo-extensión de codo y finalmente el 96.6% para la flexo-extensión de muñeca.
Debido a que se trata de un sistema redundante de 7 GDL, existe un número múltiple de configuraciones del exoesqueleto que podrían seguir el movimiento semicircular del timón; sin embargo, las configuraciones que se obtuvieron garantizan la rehabilitación del miembro superior de acuerdo con los rangos de movimiento anatómicos y funcionales.
También se analizaron los valores máximos del error que se presentaron en la simulación del ERMIS durante la ejecución del ejercicio del timón Se compararon cada uno de los rangos de los movimientos anatómicos con la respectiva suma del rango más el error máximo del movimiento de cada articulación del exoesqueleto. Así se determinó que aun en las posiciones más comprometidas, los rangos de movimiento del exoesqueleto no superan los rangos anatómicos de cada articulación y por lo tanto no produce lesiones en el paciente como luxaciones, concluyendo que el diseño del ERMIS es seguro.
Actualmente se está trabajando en el desarrollo y manufactura del modelo físico experimental del ERMIS para retroalimentar las propiedades del modelo dinámico. Posteriormente se planea seguir una metodología para el desarrollo de productos que permitan llegar a un prototipo que opere en entornos clínicos.

