











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkINTRODUCCIÓN
En estudios previos realizados sobre la valoración funcional del miembro superior de niños con parálisis cerebral (PC) con el dispositivo Sorting Block Box (SBB), se ha logrado cuantificar significativamente las diferencias en el grado de afección y control motor en sujetos sanos y con PC [1-4]. Este documento presenta la propuesta y resultados obtenidos al implementar un método de segmentación automática de tareas (los movimientos específicos de dicho experimento) para obtener un análisis de resultados más puntual y poder determinar con mayor sensibilidad el grado de afectación de cada individuo.
El SBB [5] consta de un tablero instrumentado con sensores de fuerza y presencia que detecta cuando 4 piezas de madera (cuadrado, triángulo, rectángulo, círculo) son introducidas en sus respectivos huecos, como se muestra en la Figura 1.

Se utiliza un sensor inercial o IMU, por sus siglas en inglés (Shimmer 3®), colocado sobre una muñequera elástica, para obtener simultáneamente la velocidad angular y aceleración de la muñeca y mano del sujeto que se encuentra realizando el protocolo experimental. Los sujetos tienen que introducir las piezas al tablero tres veces por cada lado y posteriormente regresarlas a su lugar de origen.
Una vez capturados los datos, se procesan en una interfaz gráfica para obtener así la suavidad del movimiento del miembro superior utilizando 3 diferentes métricas [6]. En estudios previos, se ha demostrado su funcionamiento y aporte en la determinación de la capacidad funcional del miembro torácico [8-9].
También, se ha analizado el desempeño del tablero midiendo el tiempo en completar cada actividad de llenado/vaciado de piezas [5,7-8], así como el control motor que tienen los sujetos para realizar los movimientos, utilizando diferentes métricas de suavidad de movimiento. Se ha observado que el análisis de suavidad de las señales es suficientemente sensible para distinguir impedimentos motores. Se comprobó que se logra tener diferencias entre niños con PC y sin historial clínico de afectaciones neuromotoras.
Se han elegido tres métricas de suavidad de movimiento como la base del análisis de los datos capturados en los protocolos experimentales. A continuación, se abordan brevemente.
SALM
La métrica de longitud de arco espectral (Spectral Arc Length Metric) [6] se define como la longitud de la curva del espectro de Fourier del perfil de rapidez de un movimiento ( Eq. 1-2):
Donde ωc = 20 Hz, es la banda de frecuencias que abarca los movimientos humanos normales y anormales [9].
PM
La métrica de picos (Peaks Metric), cuantifica el número (expresado por el símbolo # en la Eq. 3) de máximos locales en el perfil de velocidad de un movimiento [9]:
LDJM
La métrica Jerk logarítmico adimensional (Log Dimensionless Jerk Metric), se define como el logaritmo negativo de la tercera derivada de la posición respecto al tiempo (Jerk) normalizada [9] (Eq. 5-6):
Cada una de estas métricas fue implementada en un programa de MATLAB basado en [5]. El programa incluye modificaciones en la interfaz gráfica y un método de segmentación automático que detecta cada fase de los movimientos de llenado y vaciado de piezas.
Previamente [5,7], fueron consideradas 4 actividades base denominadas tasks (llenado y vaciado de piezas, utilizando cada brazo), para determinar la afectación del miembro superior de cada niño. Sin embargo, este método pondera las calificaciones (resultado de las métricas de suavidad) obtenidas al llenar/vaciar el tablero con las 4 piezas. Este método omite información del control motor de cada sujeto al intentar colocar/regresar las piezas de madera a sus lugares correspondientes, a que no se tiene el análisis individual de cada una de ellas.
La Figura 2 nos muestra el proceso utilizado previamente para cuantificar los movimientos. Se promedian los resultados de todas las piezas y se divide en el vaciado o llenado del tablero. Para el llenado, se completan los pasos 1-2-3 (todas las piezas), y para el vaciado, se sigue el orden 3-2-1 (todas las piezas).

De esta forma, el vaciado y llenado del tablero se contabilizaban como un intento. Se completaban tres intentos por cada lado y se promediaban los resultados, para su posterior análisis. La Figura 3 muestra un diagrama a bloques del procedimiento de obtención y procesamiento de datos, utilizando LabVIEW (National Instruments, 2014) para la adquisición de datos de los sensores inerciales y del SBB, así como MATLAB para su procesamiento.

METODOLOGÍA
Para entender la naturaleza del análisis de este estudio es importante delimitar cada movimiento que se realizará y se comparará entre los sujetos de estudio, para así lograr un resultado más exacto (al no omitir la información puntual en el manejo de cada pieza). La diferencia entre esta propuesta y el análisis previo, es el post-procesamiento de los datos, al incluir más sub-fases del movimiento estudiado.
El experimento consta de dos parámetros, que son el llenado y vaciado de piezas del tablero, que, a su vez, se replican por cada una de las cuatro piezas (Figura 4). Como propuesta de análisis, se realizó la segmentación automática de cada una de estas tareas primarias. Para lograrlo, se utilizaron los datos obtenidos del SBB (botones de posición inicial y sensores de posición de piezas). Cuando se detecta que la mano de un sujeto se ha separado del tablero, comienza una sub-tarea (subs) de llenado o vaciado. Para determinar esto, se detecta el orden con el que se presionan o liberan los sensores de posición de cada pieza. La Figura 4 muestra las diferencias metodológicas entre el método previo (usando tasks) y el propuesto (separando con subtasks)
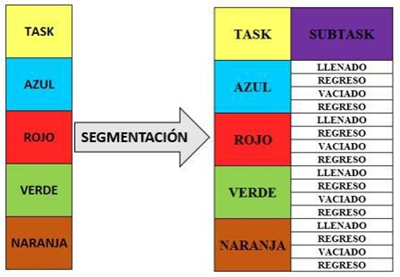
Figura 4. Tasks (izquierda) y Subtasks (derecha). El método propuesto resulta de la segmentación automática de movimientos utilizando los sensores del SBB.
Los subtaks obtenidos con el método propuesto fueron agrupados en pares según el color y la geometría de la pieza. Dichos sub-movimientos pueden ser de dos tipos:
La Figura 5 muestra el procedimiento experimental que siguen los sujetos para completar las tareas de llenado o vaciado de piezas. Utilizando los datos obtenidos con los botones y sensores del tablero, se determina el segmento (izquierdo/derecho, llenado/vaciado) de cada uno de los sub-movimientos.

Figura 5. Fases del protocolo experimental de valoración funcional del miembro superior, usando el SBB.
A continuación, se describe el protocolo mostrado en la Figura 5. La figura 5 ilustra el software diseñado.
a) El sujeto tiene sus manos colocados en los botones verdes a los costados del SBB. En el momento en que el botón cambia de 1 (siendo presionado) a 0 (no siendo presionado) inicia la partición de datos para ese sub-movimiento.
b) El paciente debe tomar la pieza correspondiente al orden de la mano que se está utilizando y colocarla en el hueco correspondiente. En el momento en que el sensor cambia de 0 a 1 (0 estado en reposo y 1 la pieza presionando el sensor) se registra el final de ese sub-movimiento.
c) El sujeto, después de haber colocado la pieza, debe regresar a presionar el botón verde para dar como concluido el sub-movimiento de regreso a la posición inicial.
Con esta propuesta, al procesar los datos y segmentarlos de manera automática, se cuenta con 16 sub-movimientos: 8 de colocación (llenado) de la pieza y 8 de regreso (detectado al presionar el botón verde) considerando ambos brazos. Estos sub-movimientos son explicados a detalle en la Tabla 1.

29 niños, entre 3 y 14 años participaron en el estudio. Se incluyó a 16 niños con hemiparesia espástica y 13 niños sanos, bajo consentimiento informado firmado por el padre o tutor. Dicho consentimiento informado fue otorgado al padre/tutor, por un médico residente del Departamento de Rehabilitación Pediátrica del Instituto Nacional de Rehabilitación, bajo previa revisión y autorización del Comité de Ética del Instituto.
La Tabla 2 muestra a los sujetos de prueba con sus respectivos años de vida, género, talla, peso, grupo al que pertenece y diagnóstico clínico.

Las variables de interés fueron:
La segmentación de las tareas se logra mediante un programa desarrollado en MATLAB (Mathworks, 2014), mostrado en la Figura 5. Este software realiza el procesamiento de manera automática al introducir los archivos de datos en crudo del sensor inercial y del SBB (generados por el programa elaborado en LabVIEW), dividiéndolo por mano derecha o izquierda.
El programa, además de dar el resultado promediado de los intentos de los lados izquierdo y derecho, permite el análisis individual por intento. También se puede analizar el resultado de cada uno de los subtasks y analizar el tiempo dedicado a cada sub-movimiento, como se muestra en las Figuras 6 y 7.


Figura 7. Ejemplo de gráfico del tiempo que tardan los sujetos en completar los sub-movimientos. Cada color representa una pieza diferente en el tablero.
Se puede crear una ficha que permite al médico observar los resultados de los 16 submovimientos promediados y comparar las diferencias entre lados izquierdo y derecho, entre los individuos del grupo de control y los individuos con PC, como se muestra en la Figura 8.

Figura 8. Ejemplo de gráfico de tiempos acumulados por pieza. Los tonos oscuros representan los sub-movimientos de llenado/vaciado, y los tonos claros, los de regreso.
Con esta ficha, se pueden comparar los resultados obtenido de la segmentación de tareas del movimiento de cada sujeto, contra los rangos obtenidos del grupo de control (promedio ± desviación estándar), hacer un análisis por pieza, lado o métrica de suavidad.
RESULTADOS
Con las métricas de suavidad (SALM, PM y LDJM) obtenidas del grupo control, se calculó un rango de normalidad de movimiento por cada sub-movimiento realizado en la prueba. Estos rangos se definieron por el promedio de cada métrica ± una desviación estándar. Para los resultados de los niños con PC, se dividieron en dos: miembro afectado y miembro no afectado.
Las Figuras 9-13 muestran ejemplos de los resultados obtenidos, al comparar al grupo de control (rectángulo acotado en gris), con diferentes sujetos del grupo experimental, tanto de su lado no afectado, como de su lado afectado (espástico). En estos gráficos, el rectángulo gris es el rango de acción normal para cada métrica (rango de normalidad) y en cada tarea; por su parte, cada punto representa el resultado de un sujeto con PC.

Figura 9. Comparativa gráfica de resultados entre sujetos sanos y con PC. Se muestra una simulación de resultados de 16 subtasks, para la métrica SALM.
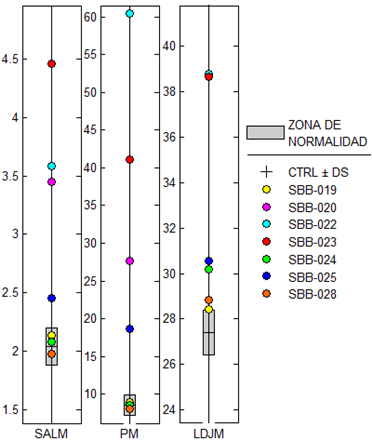
Figura 10. Ejemplo de comparativa de resultados utilizando la metodología antigua (sin segmentación tareas).

Figura 11. Comparativa de resultados al considerar la segmentación de tareas automática: Pieza naranja, al ser colocada por los sujetos con PC.

Figura 12. Comparativa de resultados al considerar la segmentación de tareas automática: Regreso a la posición inicial, después que los sujetos con PC colocan la pieza.

Figura 13. Comparativa de resultados al considerar la segmentación de tareas automática: Pieza naranja, al ser regresada a su posición inicial por los sujetos con PC.
De la Figura 9, se observa que SALM tiene un 42.8% de resultados dentro del rango de suavidad normal, lo mismo para PM (42.8%) y para LDJM un 14%; esto se debe a que las calificaciones de suavidad fueron obtenidas utilizando la metodología previa (sin segmentación de tareas). Este resultado es consistente con estudios de revisión de métricas de suavidad, como el realizado en [6], donde se menciona la necesidad de separar las tareas de movimiento dependiendo de su tipo (ejemplo: flexión y extensión de brazo) para obtener resultados consistentes. En el presente caso, esto se traduce en la mejora de los resultados obtenidos por la métrica SALM y en menor medida PM. Las Figuras 10-13 muestran este cambio de forma gráfica y se aprecia cómo se incluyen más casos en la región de normalidad; fenómeno que no ocurre en la Figura 9, al no considerar la segmentación de tareas.
Con la información recolectada, resulta poco trivial determinar cuál pieza (de las cuatro) es la que da aporta resultados más contundentes en la diferenciación del control motor y/o afectación motora del miembro superior; esto, a su vez, implica que no se puede prescindir de alguna de ellas para reducir el tiempo de duración de las pruebas.

Figura 14. Comparativa de resultados al considerar la segmentación de tareas automática: Regreso a la posición inicial, después de regresar la pieza naranja a su contenedor (vaciado de tablero), por los sujetos con PC.
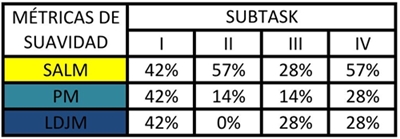
Al obtener las métricas de suavidad, para la pieza naranja (ilustrada en las figuras previas), el 50% de los valores se encontraron dentro de un rango de resultados normales, tanto como para la métrica SALM como para la métrica PM (39.62%). En cuanto a la métrica LDJM, se aumentó de un 14.28% de datos dentro del rango normal hasta un 28.7%. Este análisis se realizó para las demás piezas en todos los sujetos del grupo de control y del grupo de PC. La Tabla 3 muestra la cantidad de resultados que se encuentran en el rango de valores considerados como sanos (suavidad normal), para todas las piezas, dividido en tareas del movimiento.
Tabla 3 Porcentajes de calificaciones contenidas en el rango de normalidad para cada métrica analizada.
Para el lado no afectado del miembro superior, de 576 comparaciones individuales de cada subtask, el 47.22% se encontró dentro de un rango de suavidad normal. Si no se considerara el análisis utilizando la segmentación automática de tareas, el 38.19% de los movimientos estarían dentro de un rango aceptable.
La métrica SALM obtuvo un 64.76% de sub-movimientos en un rango normal, 43.74% para PM y sólo 33.33% para LDJM. En promedio, los casos anormales se encuentran a 0.45 desviaciones estándar alejadas del rango normal. Por otro lado, para el miembro afectado, de las 576 comparaciones individuales de cada subtask, el 67.88% aparece fuera del rango de normalidad establecido para cada acción.
De igual forma, si no se considerara la segmentación automática de tareas, el 78.47% de los sub-movimientos estarían fuera de un rango de suavidad normal. La métrica SALM tiene un 40.63% de casos dentro de este rango, 31.25% de PM y 24.48% de LDJM.
En promedio, los casos anormales se encuentran fuera de rango hasta por 5.31 desviaciones estándar. Los sub-movimientos III, V, XII, XIII, XIV, y XV presentaron un 33% de casos dentro de un rango de normalidad. Para los otros 10 sub-movimientos el promedio anormal fue de 62.5%.
DISCUSIÓN
Los resultados obtenidos fueron consistentes con la propuesta mostrada en [6], donde se insiste en segmentar las tareas de un movimiento para poder contrastar la suavidad del movimiento; sin embargo, aún falta analizar si existen diferencias significativas entre cada una de las 16 subtasks del protocolo, para poder encontrar si alguna de las piezas o tipo de movimiento (flexión/extensión, pronación/supinación), es un mejor indicativo de la función motora del miembro superior, al ser valorado con el dispositivo SBB.
Con los resultados analizados, falta descubrir los parámetros que se puedan utilizar para relacionar las trayectorias o la forma de las piezas y evaluar la dificultad de alguna tarea o pieza. Se propone continuar con un análisis multi-variable para poder determinar estos factores y obtener con precisión las diferencias significativas entre grupos, lateralidades, subtasks y la elección de la mejor métrica de suavidad.
Se propone, un incremento en el grupo de control para caracterizar puntualmente los rangos aceptables para cada movimiento. Dado que el muestreo realizado corresponde a la Fase 1/3 del Protocolo de Investigación 45/15 de la División de Investigación del Instituto Nacional de Rehabilitación, es de bajo interés poder contar con una muestra significativa de sujetos; sin embargo, el trabajo presentado sirve como una ratificación del método a utilizar en las subsecuentes fases, donde se validará estadísticamente la información recopilada, con miras en generar una herramienta de valoración funcional de miembro superior para uso clínico.
La segmentación automática de los sub-movimientos muestra una mayor efectividad que el método reportado en análisis previos al definir puntualmente (y de manera automática) los movimientos que implican el control motor de grupos musculares afines a un movimiento en particular (i.e. flexión/extensión, pronación/supinación). Con los datos procesados, se indica que el modelo experimental es óptimo para el desarrollo de las siguientes fases de la investigación; sin embargo, hace falta generar bases de datos segmentados por rangos de edades, ya que el desarrollo neuromotor es diferente en los sujetos que se incluyen en el estudio
Por último, se necesita una validación concurrente con las herramientas de valoración clínicas que se obtuvieron, para poder tener una relación directa entre el indicador funcional que resulta del análisis de la suavidad del movimiento y los siguientes parámetros: tonicidad muscular, nivel de espasticidad, función bi-manual, coordinación espacio-temporal y manipulación de objetos de la vida cotidiana.
CONCLUSIONES
La segmentación de sub-movimientos permitió aumentar la sensibilidad del dispositivo en el análisis (lado no afectado +9%, lado afectado +11%) en la agrupación de individuos con PC, al ser clasificados dentro o fuera de un rango de movimiento normal definido con sujetos sanos.
De nueva cuenta, el uso de métricas de suavidad demostró ser un indicador efectivo del movimiento del miembro superior al mostrar las diferencias entre un miembro afectado y uno no afectado denotando las diferencias del control motor y posición espaciotemporal para el miembro y tronco, así como de flexión y extensión del hombro.
El procesamiento realizado con los datos que el dispositivo (SBB) arroja, es capaz de distinguir entre los individuos sanos y entre los afectados por la hemiparesia espástica. Sin embargo, con la implementación de la segmentación de tareas, se logró dar una mayor sensibilidad al análisis para tener rangos de normalidad mejor acotados al igual que resultados más precisos para los niños diagnosticados con PC.
Se busca utilizar la metodología de valoración funcional del miembro superior, utilizando el dispositivo SBB en un ambiente clínico, puesto que los resultados proporcionados ayudarán a comprender cuantitativamente el grado de espasticidad del miembro, la habilidad de manipulación de objetos y la coordinación espaciotemporal de los mismos.
Actualmente el proyecto se encuentra:

