











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Actualmente en Colombia, el espermograma es el único examen clínico que brinda un diagnóstico aproximado de la fertilidad masculina a través de la evaluación de la calidad seminal[1]. El examen, el cual se lleva a cabo de manera manual no siempre es certero, debido a que se pueden presentar errores en el diagnóstico inherentes a la naturaleza del procedimiento[2].
Aunque el espermograma se realiza por parte de un especialista, depende solamente de la inspección visual y la experiencia de éste. Estas condiciones pueden propiciar errores en el diagnostico debido a la alta subjetividad al momento de observar y evaluar la muestra. Además, las largas jornadas de evaluación enfocando la muestra en el lente de un microscopio pueden provocar en el especialista fatiga visual, lo que dificulta aún más su trabajo y por consiguiente la confiabilidad de los resultados[4].
En los últimos años se han desarrollado sistemas comerciales de análisis seminal asistido por computador (CASA) que automatizan el proceso y solucionan dichos inconvenientes[5]. Sin embargo, su costo de adquisición es muy elevado y carecen de un estándar adecuado, lo que limita su incursión en el mercado. Aunque en Colombia no hay presencia de estos sistemas comerciales, ya existen investigaciones que presentan avances importantes en el análisis automático de los parámetros de viabilidad y concentración[6].
El propósito de esta investigación fue desarrollar una herramienta computacional semiautomática para identificación de trayectorias en espermatozoides humanos, como soporte tecnológico al análisis de motilidad espermática, con el fin de minimizar los errores humanos en el diagnóstico, dando asistencia al experto en la detección del movimiento de las células espermáticas y permitiéndole visualizar las trayectorias reales a través de la pantalla de un computador, dando lugar a un diagnóstico más objetivo.
La metodología propuesta consiste en la aplicación de técnicas de visión artificial, que se componen de diferentes métodos de procesamiento de imágenes y video, tales como: detección de movimiento en secuencia de fotogramas[7], operaciones morfológicas, análisis de componentes conectados y de un filtro de Kalman para determinar trayectorias individuales de múltiples objetivos en movimiento[8].
Finalmente, la herramienta traza dichas trayectorias sobre el video procesado.
En el presente artículo se reportan los resultados del desarrollo y validación experimental de una herramienta computacional para la identificación de trayectorias de los espermatozoides vivos sobre videos de muestras seminales obtenidas a partir de 5 individuos.
Materiales y métodos
En primera instancia, fue necesario contar con un equipo de microscopía con cámara integrada (Eclipse-Nikon) con objetivo de 40x y ocular de 10x. Se contó con un conjunto de 5 muestras seminales humanas previamente preparadas según los protocolos del manual de evaluación de la OMS[9]. Posteriormente, se capturaron los videos con resolución espacial de 1280x960 pixeles a 10 Hz.
La metodología propuesta para la detección de las trayectorias descritas por los espermatozoides se divide en 5 etapas, como se evidencia en la Figura 1.
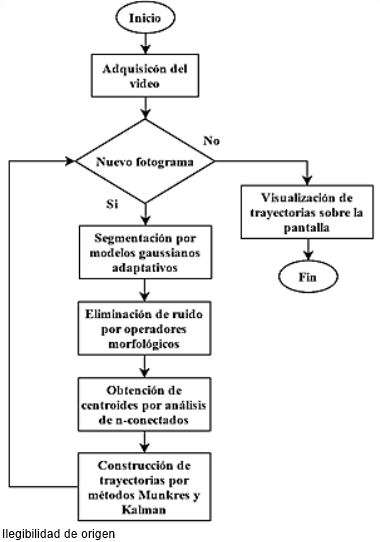
és de modelos gaussianos adaptativos. En la segunda etapa se aplican operadores morfológicos para eliminar ruido. Luego, en la tercera etapa se analizan los componentes conectados en la imagen binaria. Posteriormente, en la cuarta etapa se aplica un algoritmo de Munkres y un filtro de Kalman con el objetivo de reconstruir las trayectorias de los espermatozoides. Finalmente, se trazan las trayectorias de los espermatozoides sobre el video procesado. A continuación, se describen cada uno de los métodos implementados en las etapas diseñadas y cómo se aplicaron a la herramienta computacional propuesta.
Modelos gaussianos adaptativos
Esta técnica diseñada en[10] utiliza distribuciones normales para analizar los pixeles de las imágenes consecutivas. Cada pixel es analizado con respecto a múltiples modelos gaussianos creados de manera adaptativa. Estas distribuciones gaussianas se modelan mediante el análisis de varianzas en los pixeles. Por lo tanto, cuando un pixel presenta un relativo valor bajo de variabilidad en su magnitud a lo largo de una secuencia de fotogramas, se afirma que pertenece al fondo de imagen, y no a un objeto en movimiento y es determinado a través de la Ecuación 1, y mediante la Ecuación 2 se determina la densidad de probabilidad gaussiana:
Donde K es el número de distribuciones, en este caso fueron utilizadas 3 para representar los pixeles pertenecientes a los espermatozoides, al fondo y a las impurezas, X es el valor del píxel, es un peso estimado para el modelo por unidad de tiempo , es la densidad de probabilidad gaussiana, es el valor medio, la covarianza en la combinación de modelos, es el tamaño del dominio de la distribución normal, que depende de las 3 componentes de color del valor del pixel y T representa la traspuesta de la diferencia entre el valor del píxel y la media del módelo gaussiano.
Los pesos que modelan de manera adaptativa el fondo fueron calculados a partir de la Ecuación 3. Donde es la tasa de aprendizaje y es un valor binario determinado por la substracción correcta de un pixel por el modelo. La media y la covarianza para cada modelo actualizado se calculan a partir de las Ecuaciones 4 y 5 respectivamente. Donde es una probabilidad condicional descrita por la Ecuación 6.
Las condiciones iniciales de , , y se ajustan experimentalmente con el fin de optimizar el proceso para el caso en particular. De esta manera, a lo largo de los fotogramas el algoritmo se entrena para la detección de objetos que se encuentran en el primer plano de la imagen, ya que éstos quedan fuera del modelo gaussiano de extracción de fondo. A medida que se procesan más fotogramas, el algoritmo genera información relevante para la detección del movimiento y finalmente se obtiene una mejor segmentación de los objetos de interés.
Operadores morfológicos
La segmentación por los modelos gaussianos es efectiva para objetos en movimiento, pero normalmente se presentan pequeños objetos en la imagen binaria provocados por ruido o detecciones falsas. Por lo tanto, antes de llevar a cabo un análisis de componentes conectados es necesario optimizar la imagen segmentada mediante una serie de operaciones morfológicas.
Las operaciones morfológicas son técnicas que permiten además de eliminar pequeñas partículas de ruido, estructurar las regiones de interés en la imagen binaria [11] con el fin de ajustarla previamente para el análisis de componentes conectados. En este caso, se aplicó un operador de erosión seguido de uno de dilatación, con un objeto estructurante tipo circular con un radio de 2 pixeles.
Análisis de componentes conectados
Una vez el fotograma se encuentre umbralizado, se lleva a cabo un análisis de componentes conectados. Los componentes conectados o n-conectados hacen referencia a los pixeles con valor 1 que conforman una región en la imagen binaria [12]. En este caso, cada conjunto o agrupación de pixeles conectados representan la cabeza de un espermatozoide en movimiento.
El propósito de este análisis es el cálculo de los parámetros geométricos de los objetos de interés. De esta manera se obtiene el centroide del objeto, que es el centro de masa del espermatozoide y corresponde a las coordenadas de éste sobre la imagen, lo que permitirá llevar a cabo su rastreo. Además, se calcula la excentricidad o redondez con el objetivo de discriminar y descartar aquellas detecciones, que no presentan una forma similar a la de un espermatozoide.
Algoritmo de Munkres y filtro de Kalman
El algoritmo de Munkres (Munkres, 1957) tiene como fin realizar una asignación directa de m elementos a n destinos por medio de una matriz m x n denominada matriz de costes cuya suma sea mínima. Desde el punto de vista de la herramienta propuesta, en cada fotograma se presentan múltiples detecciones de espermatozoides que deben ser asignadas a un conjunto de trayectorias determinadas.
La matriz de costos n x m que se plantea en este caso, corresponde a n trayectorias y m detecciones. Cada elemento de la matriz representa la distancia entre el punto de referencia de una trayectoria establecida con el punto de detección para un fotograma determinado. El método de Munkres permite desarrollar un criterio para asignar una detección a una trayectoria según su posición de manera muy precisa.
Por otra parte, el filtro de Kalman (Kalman, 1960) es un algoritmo matemático que funciona mediante un mecanismo de predicción y corrección en la forma de un sistema de retroalimentación. Básicamente actúa como un estimador de un nuevo estado a partir de estimaciones previas agregando un valor de corrección, minimizando así errores de predicción.
La etapa de predicción funciona como una proyección de las variables de estado mediante las Ecuaciones 7 y 8 del filtro de Kalman en tiempo discreto:
Donde es el vector de estado actual que en espacio de estados determina el comportamiento dinámico del sistema y desde el punto de vista de la presente aplicación representa la posición actual del espermatozoide sobre el video teniendo en cuenta estados anteriores. El subíndice representa el estado previo, y son matrices de transferencia de estados, representa la entrada del sistema y se obtiene mediante la medición de la posición, es la covarianza de error a priori y es la covarianza de ruido del proceso. La etapa de corrección es el resultado de la retroalimentación al actualizar las mediciones introduciéndolas a la estimación a priori, por medio de las Ecuaciones 9, 10 y 11:
Donde es la ganancia de Kalman que disminuye la covarianza de error a posteriori, es una matriz relacionada al estado de la medición, es la covarianza de error de la medición y es la medición actual del sistema.
Esta técnica aritmética contribuye en la construcción de las trayectorias espermáticas llevando a cabo predicciones basadas en las posiciones previas de la cabeza del espermatozoide. Mientras, el algoritmo de Munkres asigna la detección que más probabilidades tenga de pertenecer a determinada trayectoria basado en la configuración del filtro de Kalman.Esta asignación pasa a ser la posición actual del espermatozoide y así se actualiza mediante la corrección de su coordenada en el fotograma. Cuando un espermatozoide se desenfoca o no es detectado en la imagen, el filtro de Kalman realiza la predicción de su posición hasta que éste vuelva a aparecer y ser detectado.
Aquellas detecciones que no son asignadas a ninguna trayectoria se toman como las posiciones iniciales de nuevas trayectorias. Las trayectorias inestables, es decir, aquellas que contienen pocas detecciones iniciales o presentan una carencia de detecciones consecutivas muy grande son descartadas del proceso, debido a que probablemente se traten de errores de detección.
Análisis de resultados
Detección de movimiento y segmentación
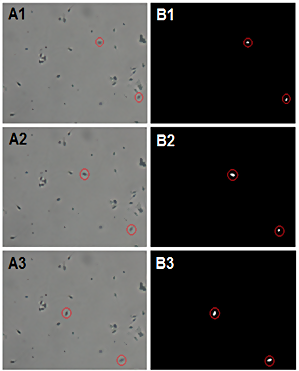
Se estudiaron los resultados de la etapa de segmentación llevaba a cabo un método adaptativo de modelos gaussianos y se encontró que el método sigue con alta precisión la trayectoria del espermatozoide. A continuación, en la Figura 2, se muestran mediante círculos rojos los espermatozoides en movimiento que fueron detectados y segmentados de dos espermatozoides. Evidenciando que el método detecta eficientemente los espermatozoides en movimiento y permitió obtener altos índices de correlación con respecto a lo observado por un técnico experto.
Eliminación de ruido
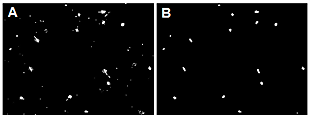
Mediante la aplicación de un operador de apertura, se logró reducir notablemente el tamaño de las partículas generadas por detecciones erróneas de movimiento. Mientras la erosión elimina las partículas más pequeñas, la dilatación restaura el tamaño de las regiones que representan las cabezas de los espermatozoides en movimiento. En la Figura 3 se muestra el efecto del operador de apertura, en la cual se logra eliminar pequeñas áreas que representan células muertas o artefactos que se mueven tras el paso del espermatozoide en el líquido seminal.
Obtención de centroides
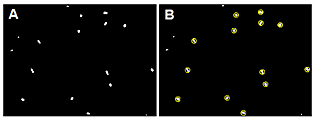
En esta etapa se calcularon los centroides de las cabezas de espermatozoides. En la Figura 4 se evidencia que existen ciertas regiones que se encuentran marcadas por un círculo amarillo. Estos objetos son considerados como cabezas de espermatozoides. Esta técnica pudo discriminar de manera efectiva al analizar el área y la excentricidad, aquellos objetos cuyas áreas estén fuera del rango de 90-110 pixeles y excentricidades mayores a 0.85 fueron excluidos. Luego, se calcularon sus coordenadas y aquellos objetos que no son considerados como espermatozoides simplemente son descartados.
Construcción de trayectorias
Se encontró que las trayectorias espermáticas fueron detectadas y asignadas de manera satisfactoria. En la Figura 5-A se observan los centroides detectados a lo largo de una serie de 30 fotogramas. Las asignaciones de éstas detecciones dan como resultado la obtención de las trayectorias reales mostradas en la Figura 5-B.

Se obtuvo entonces que cada trayectoria fue diferenciada de las demás, incluso cuando existe una superposición de centroides pertenecientes a dos trayectorias espermáticas diferentes, el algoritmo de Munkres puede asignar cada centroide de forma correcta. Por su parte, el filtro de Kalman para cada espermatozoide se configuró de manera experimental con una varianza de posición de 100 pixeles, una varianza de velocidad de 10 pixeles por segundo y un ruido de medición de magnitud 50, hallando así el mejor desempeño posible.
Validación
Con el objetivo de validar la metodología propuesta, se realizó un experimento en el cual se analizaron videos correspondientes a 5 muestras de individuos con diferente comportamiento espermático. Para ello, se compararon los resultados hallados mediante la herramienta computacional con respecto a la cantidad de trayectorias espermáticas detectadas por el técnico experto en andrología, el cual observó cada video y basándose en su criterio determinó la cantidad de trayectorias descritas por espermatozoides en movimiento. Posteriormente, se calculó una correlación simple con los datos obtenidos en el experimento. En la Tabla 1 se evidencia una precisión mínima del 83,33% y una máxima del 96,00% para videos con diferentes características. En general, el algoritmo conserva un promedio de error del 10% con respecto a la observación del especialista. Evaluando el total de trayectorias espermáticas detectadas se encuentra que la precisión del algoritmo propuesto fue superior al 90,91 %.

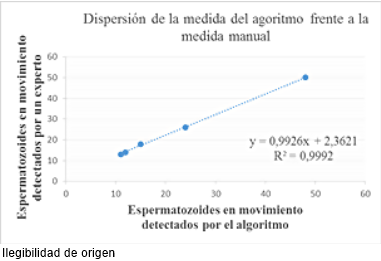
Por otra parte, se realizó la validación estadística la cual permitió evidenciar para las 5 muestras de semen humano, que la herramienta computacional con respecto a los métodos tradicionales bajo microscopio presentó un coeficiente de determinación mayor a 0.9992, indicando que la herramienta determina el 99.92% de la trayectorias que encuentra el experto, con un sesgo de 2.3621 trayectorias de desfase entre las dos mediciones; corroborando la precisión de la herramienta para determinar trayectorias de espermatozoides sobre un vídeo a partir de una muestra seminal. A continuación, en la Figura 6 se muestran los resultados del análisis en cuanto a la correlación del número de espermatozoides en movimiento detectados tanto por el algoritmo como por un técnico experto.
Finalmente, se realizó la correlación estadística de los resultados obtenidos y no se encontró variabilidad significativa entre la medida manual y la herramienta computacional.
En la Figura 7, se muestra la tendencia de los resultados obtenidos con la herramienta frente a los resultados obtenidos por el técnico experto en cuanto al número de espermatozoides rastreados correctamente para las 5 muestras observadas, en ella se evidencia que la cantidad de trayectorias correctas halladas por la herramienta computacional, concuerda con las del técnico en cada uno de los individuos involucrados en el proyecto.

Discusión y conclusiones
El procedimiento de preparación de la muestra seminal para la adquisición del video objeto de análisis, es muy importante ya que se debe garantizar que en las imágenes se minimice la presencia de objetos indeseados, impurezas o residuos de otros materiales. Además, se debe controlar la concentración de espermatozoides con el fin de evitar aglomeraciones que perjudiquen el correcto análisis y desempeño del algoritmo propuesto.
Lo anterior facilita la segmentación, ya que el movimiento de estas partículas genera detecciones erróneas en la imagen binaria, provocando así muchas distracciones que el algoritmo propuesto debe enfrentar. Por lo tanto, una buena calidad de videos repercute positivamente en el desempeño de la segmentación por modelos gaussianos adaptativos.
Se evidenció que algunos espermatozoides no fueron segmentados mediante la metodología propuesta. Esto se debe a que no presentaron movimiento alguno, por lo que el método de modelos gaussianos adaptativos solo diferencia aquellos espermatozoides que presentan un desplazamiento entre un fotograma y el siguiente de manera efectiva.
La cantidad de falsos centroides calculados por medio del análisis de regiones fue significativa, por tanto, mediante la técnica de apertura morfológica se consiguió filtrar las partículas remanentes de la etapa de segmentación y mejorar así los resultados del análisis de regiones en la imagen binaria. A pesar de esto, fue incluso necesario desarrollar una fase de discriminación a partir de áreas y excentricidades, para minimizar aún más las detecciones erróneas.
Teniendo en cuenta que las trayectorias recorridas por los espermatozoides se consideran como un sis tema dinámico no definido, se ajustaron las constantes del filtro de Kalman de manera experimental. Las observaciones tanto del desplazamiento como la velocidad de los espermatozoides en pixeles por segundo en el video sirvieron como un referente para la configuración del filtro de Kalman.
A causa de que los videos capturados para la prueba de la herramienta computacional presentan solamente 10 fotogramas por segundo, la etapa de construcción de trayectorias se ve afectada debido a que no existe la cantidad de información suficiente para la descripción detallada del comportamiento cinético de los espermatozoides. Se recomienda que como mínimo los videos deben poseer 30 fotogramas por segundo, y para análisis más robustos de 60 fotogramas por segundo.
En conclusión, a través de la metodología propuesta, se logró implementar un algoritmo modular y configurable que permita la detección y rastreo de las trayectorias espermáticas a través de un conjunto de técnicas de procesamiento digital de video con 90.91% de exactitud con respecto al análisis manual. Así mismo, presentó un coeficiente de determinación mayor a 0.9992, indicando que la herramienta computacional desarrollada detecta el 99.92% de la trayectorias encontradas por un experto, además se encontró mediante el modelo de regresión un sesgo de 2.3621 lo cual indica una diferencia mínima entre las dos metodologías; corroborando la precisión de la herramienta para determinar trayectorias de espermatozoides sobre un vídeo.
De esta forma, se brinda un soporte tecnológico para la observación del comportamiento cinético de los espermatozoides, lo que le servirá de asistencia a un experto para llevar a cabo un análisis más objetivo de motilidad espermática en muestras seminales humanas.
De manera similar a lo establecido en un estudio piloto mediante el software ImageJ[15], por medio de la herramienta computacional desarrollada se puede identificar y rastrear las trayectorias de espermatozoides en vídeo, para la determinación de la motilidad espermática individual.
Finalmente, con la metodología propuesta se llegó a una primera aproximación, que permite la identificación de parámetros espermáticos sin depender de sistemas computacionales (CASA). El trabajo futuro se centrará en determinar la motilidad espermática individual en humanos, mediante una aplicación real que permita incorporar la detección del número de espermatozoides muertos, vivos con movimiento y sin movimiento. Así como también, clasificar las trayectorias a través de los índices de rectitud y velocidad promedio de manera automatizada.

