











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
La cirugía laparoscópica es una práctica quirúrgica que ha tenido un gran desarrollo en las últimas décadas [1]. Actualmente muchas cirugías son ejecutadas mediante esta técnica debido a las ventajas que ofrece respecto a la cirugía abierta, tales como: menor dolor, disminución del tamaño de la incisión, mejor cicatrización, menor tiempo de recuperación y de incapacidad laboral del paciente, y por ende reducción de costos hospitalarios [2] [3]. Sin embargo, presenta algunas limitaciones como pérdida de la sensación táctil, deficiente percepción de profundidad, y en procedimientos prolongados puede presentarse temblor en la mano del cirujano y fatiga. Además el movimiento de los instrumentos es invertido, alterando la coordinación entre la mano y el ojo. Estos inconvenientes se solventan mediante el uso de robots quirúrgicos en lugar de la manipulación directa por parte del cirujano.
La cirugía robótica posibilita la realización de intervenciones complejas a razón del mayor número de grados de libertad disponibles ampliando considerablemente el espectro de acciones posibles, también permite restringir movimientos erróneos y mejora la precisión de los mismos elevando la eficiencia en beneficio del paciente, con esta técnica la posición de trabajo del cirujano es confortable a diferencia de la forma tradicional de laparoscopia, y permite la ejecución de operaciones a distancia (tele-cirugía).
Los sistemas de robótica quirúrgica son llamados asistentes quirúrgicos, ya que es el cirujano quien dirige cada uno de los movimientos y acciones, realizados mediante interfaces tipo joystick. Sin embargo los mecanismos de control ampliamente aceptados y el sistema robótico en sí mismo requieren de un extenso periodo de entrenamiento.
El sistema de robótica quirúrgica de mayor difusión en la actualidad es el robot Da Vinci, diseñado para realizar variados procedimientos, entre los que se encuentran afecciones del colon, vejiga, arterias coronarias, vesícula, próstata, garganta, entre muchas otras [4]. En el mercado existen otros robots para llevar a cabo diversos procedimientos, por ejemplo para el implante de prótesis de cadera donde se requiere precisión milimétrica [5], del mismo modo hay soluciones para la inserción de placas en la columna sin lesionar el sistema nervioso [6], robots de guía de catéter en conductos circulatorios para ablación de tejidos y eliminación de tumores en zonas de difícil acceso mediante radiación [7], entre otros. Convencionalmente los controles que dirigen los movimientos de los robots son articulaciones pasivas, algunas con realimentación de fuerza (o háptica). En el caso del robot Da Vinci los dedos se ubican como lo indica la Figura 1, de esta forma se manipula el terminal en el interior del paciente desplazándolo hasta un lugar determinado, donde se realiza suturas, disecciones, abrir o cerrar pinzas y en general todo lo necesario para dirigir al robot en la ejecución de un procedimiento. Debido a la dinámica de los controles mencionados, el principal aspecto en la capacitación de los cirujanos consiste en trasladar adecuadamente las herramientas al interior del paciente.

Debido que la tecnología avanza constantemente en busca de formas más eficientes para llevar a cabo determinadas tareas, la manipulación de robots quirúrgicosque actualmente se realiza a través de controles mecánicos podría mejorarse al reemplazarlos por interfaces naturales, que consisten en el uso de características del cuerpo humano tales como el movimiento de las manos o los brazos, la voz, y pupilas, con el fin de interactuar con determinadas aplicaciones. Por este motivo un área de investigación reciente es la utilización de gestos, debido a que la operación es más natural, intuitiva y amena que los sistemas de control convencionales [8] [9], además permite una mejor inmersión, generando que la relación del usuario con la aplicación se perciba como si fuese una interacción real. De igual manera mejora la experiencia del usuario, reduce la carga cognitiva y acelera el aprendizaje mediante la memoria kinestésica [10]. En general este tipo de técnicas ofrecen facilidad para aprender a utilizar alguna aplicación, y adquirir pericia y dominio en muy poco tiempo [11] [12] [13].
En el ámbito médico quirúrgico se requiere de imágenes diagnósticas para definir las acciones del procedimiento. Esta tarea se realiza mediante teclado y mouse, lo que incrementa el tiempo y la posibilidad de contaminación por contacto, por este motivo algunas innovaciones buscan facilitar esta tarea manteniendo las condiciones de salubridad y disminuyendo los riesgos. Wachs y otros [14], desarrollaron un sistema de manipulación de imágenes radiológicas que consiste en el reconocimiento y seguimiento de gestos de las manos, permitiendo al cirujano mantenerse enfocado en su labor, conservando la esterilidad y disminuyendo el tiempo del procedimiento. Jacob y otros [15], desarrollaron una enfermera robótica que suministra instrumentos durante una cirugía, este sistema detecta ordenes mediante comandos de voz o gestos capturados por un Kinect y entrega el instrumento solicitado. Zhou y otros [16], realizaron un estudio comparativo de la manipulación de un robot quirúrgico mediante interfaz sin contacto como Kinect y Leap Motion, junto a dispositivos hápticos como el control Omega, Hydra y teclado. En el experimento utilizaron un robot Taurus con realimentación de fuerza mediante sonidos y señales gráficas para las interfaces naturales.
Partiendo de los conceptos mencionados el presente artículo muestra el desarrollo de un sistema de manipulación de robots mediante gestos, con el propósito de probar que al utilizar interfaces naturales se obtiene mayor fluidez en la ejecución de los procedimientos y naturalidad en la manipulación. En este caso se utilizan dos robots quirúrgicos virtuales en un procedimiento de colecistectomía laparoscópica, y el dispositivo Leap Motion para capturar los gestos del usuario [17]. El prototipo desarrollado fue probado por varias personas quienes valoraron su ejecución sobre el citado procedimiento.
Materiales y métodos
Con el propósito de evaluar la manipulación de robots quirúrgicos mediante interfaz natural, se implementó una colecistectomía que consiste en la extracción de la vesícula por presencia de cálculos biliares. La función de dicho órgano es suministrar la bilis que ayuda a digerir los alimentos especialmente la carne y las grasas.
El procedimiento para una colecistectomía consiste en una serie de pasos que se describen a continuación: en la fase uno es necesario seccionar los tejidos que cubren la arteria y conducto cístico en el área del triángulo de Calot para exponerlos totalmente. En la fase dos se colocan mínimo cuatro clips o grapas sobre los conductos para evitar derrames. En la fase tres se cortan los ductos mediante un electro bisturí que cauteriza el tejido y sella la disección. En la fase cuatro el cirujano sostiene la vesícula mientras realiza el corte de los ligamentos que la adhieren al lecho hepático. Finalmente en la fase cinco se colocan el órgano en una endobolsa y se extrae, teniendo en cuenta la verificación del buen estado de la región intervenida.
Las fases mencionadas se ejecutan utilizando dos robots quirúrgicos desarrollados en la Universidad del Cauca, Colombia, cuyo funcionamiento se modela e implementa en un simulador.
Los robots quirúrgicos utilizados son el robot Lapbot [18], diseñado para posicionar y orientar el instrumental quirúrgico dentro de la cavidad abdominal del paciente, y un robot portaendoscopio denominado Hibou [19], desarrollado para la orientación del endoscopio, o cámara dentro del paciente.
El propósito del portaendoscopio es proporcionar el mejor ángulo y posición de la vista del área a intervenir debido a que el cirujano depende únicamente de la imagen para la ejecución de cada procedimiento, por lo tanto el robot se traslada conforme se requiera. Existen distintos enfoques del control de este tipo de sistemas, entre los que se encuentra la ubicación por comandos de voz, posición de la pupila o ángulo de la cabeza del mismo cirujano, pero convencionalmente es un asistente quien lo dirige.
La construcción real de los robots requiere de una adecuada investigación e inversión, pero mientras tanto es posible evaluar sus capacidades en un simulador que contiene los modelos correspondientes para su operación, en el presente caso es un ambiente virtual 3D desarrollado con la librería de visualización gráfica de código abierto VTK, que brinda clases, funciones y métodos que permiten interactuar con modelos 3D [20], y la librería de detección de colisiones Vcollide, sobre la plataforma de desarrollo Visual Studio 2010.
Como detector de gestos se utiliza el dispositivo Leap Motion, diseñado para realizar el seguimiento de las manos en tiempo real sobre un espacio de tres dimensiones de 0,227 m3, con captura de 50 a 200 cps, y precisión de 1/100 milímetros, además cuenta con una plataforma de desarrollo SDK API (Application Programming Interface) que soporta varios lenguajes, y la documentación correspondiente [21].
En la Figura 2 se presenta la interfaz gráfica de la aplicación construida, que cuenta con dos ventanas; la primera ubicada a la izquierda representa la vista interna del paciente que suministra el endoscopio, cuya posición la traslada el usuario dependiendo de la necesidad de tener un mejor punto de observación para ejecutar una tarea. Convencionalmente un auxiliar recibe la orden del cirujano para orientar la cámara limitando el flujo de trabajo en algunas ocasiones, pero cuando el mismo especialista lo realiza, dicha tarea se torna más eficiente.

En la vista interna se aprecian los órganos, el movimiento de los extremos de los robots y el comportamiento de las herramientas. La ventana derecha muestra el quirófano completo, con dos robots Lapbot, un robot Hibou y el paciente. El renderizado es independiente para cada ventana para evitar sobrecarga o que la animación se vea lenta.
El sistema de ejes de coordenadas del ambiente virtual y los ejes definidos por el Leap Motion son distintos en sus dimensiones, por lo tanto se requiere ajustar el paso de los valores de las posiciones entregados por el sensor, utilizando una matriz de transformación que establece la relación entre dos espacios en 3D. En este caso se plantea un cambio de escala y traslación para ajustar los desplazamientos en el ambiente virtual, como se indica en la Ecuación 1:
 (1)
(1)
El valor de 4000 es la constante que permite escalar la posición para interactuar adecuadamente con los objetos virtuales del ambiente 3D. Los factores que se suman en cada uno de los ejes permiten trasladar las posiciones recibidas de tal manera que se ubiquen en las cercanías de los órganos, de lo contrario en ningún momento tendrían contacto con las herramientas manipuladas. Ambos parámetros fueron definidos de la siguiente manera:
1. Se observaron los valores entregados por el dispositivo de captura en cada uno de los ejes X, Y, Z.
2. Se comparó las posiciones de los órganos virtuales en el ambiente 3D, con los parámetros obtenidos de las manos.
3. Se estableció el rango de desplazamientos que se requiere en las proximidades de los órganos con el fin de ajustar la escala de los movimientos.
4. Finalmente se establecen factores que se suman o se restan a las posiciones, para que el objeto que se traslada en el ambiente se desplace junto los órganos.
La robótica quirúrgica permite ciertos avances inherentes de esta tecnología sobre la laparoscopia normal, uno de ellos es la delimitación del área para el movimiento seguro. En este caso se estableció una región de protección donde el usuario desplaza el terminal, pero cuando se alcanza el límite fijado el sistema deshabilita el movimiento, brindando mayor seguridad a los posibles pacientes. Adicionalmente con el propósito de eliminar los movimientos involuntarios como temblor en las manos, se utilizó un filtro de respuesta infinita al impulso IIR aplicado a los valores de las posiciones de cada eje de coordenadas, tal como lo indica la ecuación 2, donde la variable suavizado es un porcentaje de filtrado entre cero y cien. La variable x depende de su valor anterior y la nueva posición recibida X0. El valor de suavizado se estableció en 80, ajustándolo mediante la observación de la respuesta del simulador. La Ecuación 2 se aplica para la posición en cada eje.
 (2)
(2)
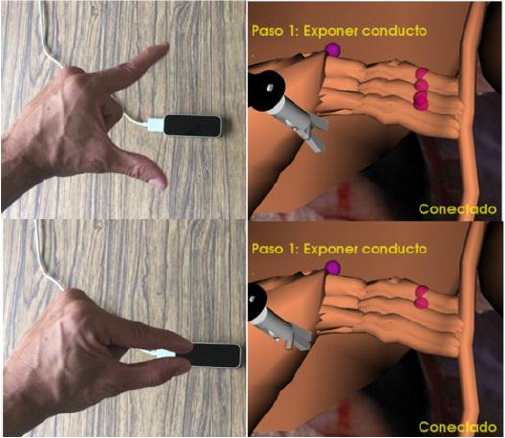
En un procedimiento quirúrgico, además de desplazar los instrumentos en todas las direcciones es necesario halar o cortar mediante pinzas. El instrumento puede estar abierto, cerrado o en posiciones intermedias para permitir tareas como cortar, separar tejidos o sostener órganos. En el simulador la apertura de pinzas se establece mediante la separación del dedo pulgar e índice izquierdo para la herramienta izquierda. En la Figura 3, izquierda se muestra la posición correcta de la mano y sus dedos para manejar las pinzas, en la imagen derecha se observa la herramienta que cambia su estado imitando la condición de la mano. Para colocar las grapas se utiliza el mismo principio, cerrando los dedos para ubicar cada una de ellas.
En la aplicación desarrollada se implementó un protocolo para la ejecución de una colecistectomía virtual que consiste en el conjunto de etapas que componen la cirugía, de igual manera la interfaz gráfica presenta los órganos y las herramientas involucradas con movimientos y acciones similares a los reales para tener un entorno aceptable que permita manipular los robots con los gestos.
A diferencia del trabajo presentado en [17], se muestran a continuación varios cambios y mejoras al sistema.
Secuencia del protocolo
El protocolo utilizado para realizar el procedimiento virtual de extracción de vesícula es el siguiente:
a. Seleccionar el instrumento para cada robot en la interfaz de usuario de Qt (pinza, bisturí, cauterizador, grapadora).
b. Colocar las manos en el espacio definido (ver Figura 4.).
c. Orientar y disponer la mano izquierda para abrir la pinza adecuadamente.
d. Habilitar el movimiento de cada robot colocando las manos en la región próxima a la vesícula con el fin de trasladar y manipular los instrumentos.
e. Ejecutar el procedimiento de colecistectomía realizando las siguientes etapas:
i. Exposición del conducto y arteria císticos.
ii. Ubicación de grapas en los conductos.
iii. Sección del conducto y la arteria císticos.
iv. Disección de la vesícula del lecho hepático.
v. Extracción de la vesícula.

Resultados y discusión
La propuesta desarrollada fue puesta a prueba con el propósito de determinar la percepción de la herramienta y la valoración de los beneficios de usar interfaces naturales en este tipo de aplicaciones quirúrgicas. Para establecer un punto de comparación, los ejercicios de manipulación de los robots desarrollados con las manos, también se realizan mediante un joystick. Los participantes del experimento fueron 13 personas, 7 hombres y 6 mujeres, con una edad promedio de 28 años, de los cuales 5 son estudiantes de la especialización en Cirugía General y el resto estudiantes de Ingeniería en Automática Industrial de la Universidad del Cauca, Colombia. El tamaño de la muestra es el adecuado debido a que el testeo de pocos usuarios, por ejemplo 5, es suficiente para identificar problemas de usabilidad [22].
Los resultados obtenidos se muestran en la Figura 5, donde en el eje “x” se representa el índice de cada una de las preguntas que se encuentran en la Tabla 1. Los participantes dieron su concepto en una escala de Likert de siete puntos donde pueden seleccionar: muy de acuerdo (MA), de acuerdo (A), ligeramente de acuerdo (LA), neutral (N), ligeramente en desacuerdo (LD), en desacuerdo (D) o muy en desacuerdo (MD). En el eje “y” están apilados los porcentajes de incidencia de cada opción encontrados para cada pregunta.


En la encuesta suministrada a los participantes, cada pregunta se diseñó para abstraer la perspectiva de los usuarios respecto de distintos tópicos importantes para definir la experiencia de utilizar interfaces naturales en tareas de especial atención como la manipulación de robots para procedimientos quirúrgicos.
Los resultados encontrados en las pruebas realizadas y consignados en la Figura 5, son detallados de manera particular en los tópicos presentados a continuación:
Facilidad de uso de interfaces
Confirmando una de las ventajas principales que ofrecen las interfaces naturales, los participantes manifestaron que utilizar gestos es intuitivo, fácil de entender y utilizar. El 38% manifestó estar muy de acuerdo y el 46% de acuerdo, en cambio a algunos de ellos no les pareció que el Joystick ofreciera esta característica (ver Figura 5. P1).
Asimilación y retención del procedimiento
Con el propósito de determinar la familiaridad y la percepción cognitiva se preguntó cuál sistema podría recordarse con mayor facilidad. Se encontró que el 54% de los encuestados dijo estar muy de acuerdo, y el 46% en estar de acuerdo con que el uso de gestos se recordaría con mayor facilidad.
Se aprecia entonces que todos apoyan esta afirmación, este resultado indica que realizar gestos facilita la retención de nuevas habilidades (ver Figura 5. P2). En el caso del uso del Joystick los resultados son distribuidos entre quienes están de acuerdo y quienes no, quizás por el hecho que esta interfaz mecánica sea más conocida.
Percepción de cada interfaz
Para conocer la comodidad que ofrece el sistema se preguntó qué apreciación tenían respecto a si usar gestos es más confortable y agradable que usar el Joystick, ante lo cual el 92% dijo estar muy de acuerdo (ver Figura 5. P3), lo que indica que la afirmación no solo lleva el respaldo de los participantes sino que su percepción es de total convencimiento.
Las interfaces de tipo Joystick presentan restricciones mecánicas por lo cual el usuario debe limitarse al rango de movimientos permitidos. Adicionalmente para mantener la palanca de Joystick en alguna posición se debe mantener presión sobre él.
Velocidad de ejecución
El 85% de los encuestados afirmó estar muy de acuerdo en que usar gestos es más rápido y preciso (ver Figura 5. P4), lo cual es consecuencia de la ausencia de restricciones. Además la precisión depende de la escala en la que se establezcan los movimientos de las manos respecto del terminal. La importancia de este resultado radica en que la mayoría de participantes nunca había utilizado este tipo de interface y con tan solo unos pocos minutos de entrenamiento se logran resultados aceptables, contrario al Joystick que requiere de un periodo más extenso para su dominio, por esta razón el 23% tiene una percepción neutra.
Fluidez del procedimiento
Al respecto de la forma en que se logra realizar el ejercicio todos afirmaron que usar gestos permite mayor agilidad y fluidez en la manipulación del robot, esto es consecuencia de la ausencia de artefacto mecánico, lo que posibilita la naturalidad de los movimientos (ver Figura 5. P5).
Agrado en la interacción
Para la usabilidad como para la experiencia de usuario es necesario establecer el grado de familiaridad y empatía entre el beneficiario y la aplicación. Al respecto más del 90% afirmaron que les parece divertido y disfrutaron de la actividad al realizarla con gestos, mientras que con Joystick presentan una percepción neutra del 53%, como se muestra en la Figura 5. P6).
Frustración en la interacción
Al consultar sobre las emociones acontecidas durante el ejercicio el 54% afirmó que no estaba de acuerdo con que usar gestos le cause frustración. Pero el 37% afirma que el Joystick si la produjo, esta valoración indica que utilizar gestos permite una interacción amena y cómoda a diferencia de utilizar Joystick (ver Figura 5. P7).
De acuerdo los datos mencionados en los anteriores párrafos se presentan las siguientes apreciaciones:
Se encontró que utilizar la interfaz natural ofrece una interesante forma de interactuar con aplicaciones, lo que podría optimizar la eficiencia de las tareas ejecutadas. Además debido a la facilidad para adquirir pericia mediante el uso de interfaces naturales, combinado con la sencillez para asociar y recordar los fundamentos de manejo y la cualidad de los movimientos de ser intuitivos, es posible disminuir los periodos de entrenamiento en el uso de alguna herramienta con todas las ventajas inherentes. De igual manera existe menor riesgo de ambigüedad o errores en los movimientos debido a que son similares a los que se utilizan con objetos reales.
La agilidad, el correcto flujo de trabajo y facilidad para ejecutar movimientos puede permitir en el contexto de la manipulación de robots quirúrgicos realizar procedimientos más complejos o mejorar la eficiencia de los existentes, disminuyendo riesgos e incrementando la calidad de los mismos. Con relación al mecanismo de manipulación se infiere que la ausencia de artefactos mecánicos disminuye las complicaciones que se presentan por el desgaste de piezas, tales como disminución de las prestaciones del dispositivo o reemplazo por falla, además del mantenimiento asociado.
La facilidad para utilizar las interfaces naturales, proporcionan un ambiente cómodo, ameno y de baja carga cognitiva, que podría mejorar la ejecución de labores complejas. En este ámbito es importante aclarar que en ocasiones los procedimientos con cirugía robótica implican más tiempo que en la laparoscópica convencional, debido a la preparación o disposición adecuada del equipo, lo que no corresponde a la ejecución como tal.
Para una valoración detallada se requiere esclarecer los siguientes aspectos. El primer tópico a considerar es que el dispositivo utilizado entrega los parámetros solicitados el 100% del tiempo mientras que no exista traslape de las manos o los dedos, debido a que no serán visibles por el dispositivo. En este sentido el sistema funciona de forma similar a una interfaz mecánica cuyos parámetros son leídos en todo momento. Adicionalmente el enfoque utilizado se fundamenta en verificar el cumplimiento de algunas condiciones de los parámetros solicitados, por lo tanto el sistema opera los robots virtuales en todo momento.
El segundo tópico a considerar es que todos los usuarios ejecutaron satisfactoriamente las tareas asignadas, pero con diferencias en la duración del ejercicio. Por lo tanto las pruebas eran correctas pero el tiempo requerido mediante el Leap Motion es tan solo el 45% del tiempo utilizado con el joystick, por lo tanto es un enfoque que podría ser considerado en el campo de la tele-operación de robots quirúrgicos. Esto corrobora lo que plantean Travaglini y otros [23], quienes utilizan el mismo dispositivo para tele-operar un robot tubular concéntrico en cirugías de hipófisis endonasal. Ellos contrastaron el sistema con el uso de una interfaz Omni-Phantom, encontrando resultados similares entre las dos interfaces y mencionan que el uso del Leap Motion es bastante prometedor en esta área.
Conclusiones
En este artículo se presentó la manipulación de dos robots quirúrgicos virtuales mediante interfaces naturales, integrado en un simulador utilizando los gestos ejecutados con las manos del usuario para desplazar libremente los extremos de los robots. De igual manera, se implementó una colecistectomía virtual que cumple con los pasos básicos del procedimiento, que permite la valoración del uso de interfaces naturales para esta aplicación específica. El sistema fue probado por varios usuarios entre ellos estudiantes de especialización en cirugía, los que respondieron un cuestionario para evaluar la experiencia de usuario y de esta manera determinar la potencialidad de este tipo de interfaces.
Se encontró que al utilizar gestos los participantes relacionan fácilmente que los movimientos del extremo del robot son proyección de los desplazamientos que realizan sus propias manos; del mismo modo abrir o cerrar las pinzas refleja la intención del usuario. Utilizar gestos también permite un mejor flujo de trabajo así como una conexión estrecha entre el robot y quien lo controla permitiendo que la ejecución sea “natural”, como si el terminal fuera una extensión del cuerpo con elevada precisión y agilidad, de tal manera que las tareas se ejecutan mejor y más rápido. Es precisamente por este motivo que la totalidad de los participantes manifestaron que es más agradable y confortable que utilizar el joystick.
Futuros trabajos completarán el simulador con ejercicios más complejos y otras cirugías, con el fin de convertirse en una herramienta operacional de uso común en los cursos de cirugía.

