











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
El cuerpo humano está compuesto por diversos sistemas biológicos que difícilmente pueden reemplazarse por dispositivos biomédicos. A pesar de los avances en ingeniería biomédica no ha sido posible emular, completamente, la función de segmentos corporales y articulaciones que se pierden con la amputación [1]. Por ejemplo, las prótesis inteligentes no han logrado desarrollar la potencia para emular la función de una rodilla human en tareas como: subir y bajar escaleras, caminar a diferentes velocidades, montar en bicicleta y sentarse. Además, las prótesis generan asimetría en la marcha demandando mayor esfuerzo en articulaciones y mayor gasto metabólico [2-7].
Uno de los principales problemas en prótesis transfemorales inteligentes se relaciona con la coordinación de este dispositivo biomédico y el cuerpo humano. La coordinación prótesis-muñón es un problema no trivial y se debe a la forma de cómo se obtienen los parámetros de marcha de una persona con amputación, y la manera en que éstos se utilizan para el diseño de prótesis. Las prótesis tienen como objetivo reproducir una marcha normal y actividades de la vida diaria. Asimismo, la prótesis debe estimar su posición y velocidad de avance en tiempo real para adaptarse a movimientos del muñón y, de esta forma, realizar la marcha de forma conjunta en diferentes terrenos y velocidades [8].
La coordinación muñón-prótesis depende de los parámetros de diseño y técnicas para establecer la estrategia de control. En la literatura existen reportes de diferentes técnicas y métodos de estrategias de control en prótesis transfemorales, éstas se pueden dividir en dos grupos: estrategia basada en señales de electromiografía (EMG, por sus siglas en inglés) y estrategia con patrones de marcha estándar.
Las estrategias de control basadas en EMG utilizan terminales nerviosas que aún están presentes en músculos del muñón. Esta técnica evita el periodo de adaptación y aprendizaje de los controles de la prótesis por parte del usuario. La técnica permite identificar la intención de movimiento del usuario, logrando con ello un control más directo y natural [9-14]. En [9] se presenta un algoritmo de control activo-reactivo que permite estimar el torque articular a través de EMG; los autores reportan trayectorias de marcha similares a una marcha estándar, sin embargo, las pruebas no fueron realizadas por personas con amputación. Por otro lado, las estrategias de control basadas en patrones de marcha estándar dividen el ciclo de marcha en diferentes eventos (independientemente de las fases de marcha), éstos indican posiciones y posturas que desarrolla el miembro inferior para lograr un ciclo de marcha. Los eventos son monitoreados a través de sensores colocados internamente en la prótesis de pie y rodilla [15-18].
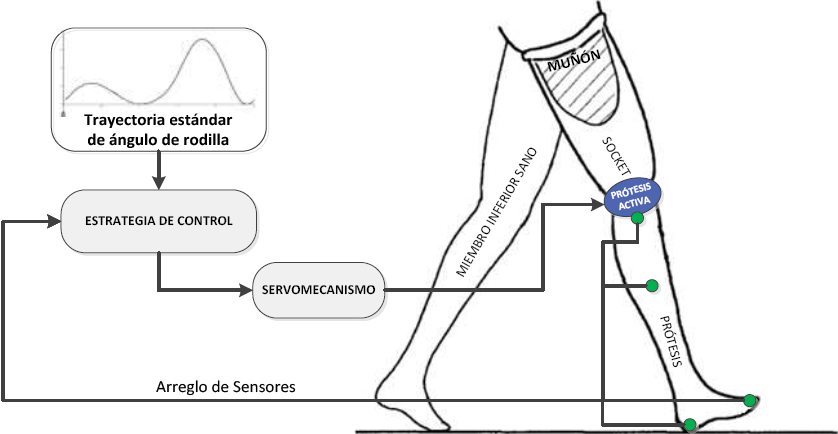
La Figura 1 muestra un diagrama a bloques de la estrategia de control basada en marcha estándar. El primer bloque contiene la trayectoria de referencia que corresponde al ángulo de rodilla. Una vez identificado el inicio del ciclo, la estrategia inicia la reproducción de la trayectoria previamente establecida. Generalmente, esta metodología utiliza técnicas de control adaptable, control inteligente y control no lineal para ajustar la posición de la prótesis a la trayectoria de referencia (patrón estándar de rodilla) [18- 21]. En [22] se propone dividir el ciclo de marcha en 5 fases: flexión de apoyo, extensión, pre-balanceo, flexión de balanceo y extensión de balanceo, esto permitió utilizar máquinas de estado para controlar pequeños segmentos del ciclo de marcha mediante control adaptable.
A pesar de las diferentes estrategias de control desarrolladas para gobernar prótesis transfemorales inteligentes, aún no se ha logrado recuperar la correlación natural de movimientos entre cadera-cadera y cadera- rodilla que se pierde durante la amputación. En un individuo, esta correlación se establece durante varias etapas de la vida hasta la edad adulta. En consecuencia, cuando una persona sufre amputación se pierden los patrones de movimiento que habían sido establecidos durante su vida; por lo que ahora, encontrar dichos patrones se convierte en el principal problema. Los algoritmos que utilizan redes neuronales y EMG para estimar ángulo de prótesis transfemorales son presentados en [10,11]. Sin embargo, debido al costo computacional los algoritmos sólo son implementados en línea.
En este trabajo se presenta un algoritmo que estima el ángulo de rodilla a través del ángulo de cadera y parámetros de marcha en tiempo real. Se analizó la marcha de nueve sujetos de fenotipo mexicano, los resultados fueron la base de diseño del algoritmo. Se utilizaron las particularidades de la velocidad angular de cadera para determinar el inicio y fin del ciclo de marcha. El ángulo de rodilla se estimó mediante inferencia estadística a través de regresores lineales. Uno de los propósitos del algoritmo es su implementación en estrategias de control para prótesis transfemorales inteligentes y, de esta forma, estimar la posición de la prótesis en tiempo real. Con este algoritmo se pretende que la prótesis pueda adaptarse a diferentes velocidades de marcha.
Metodología
Para obtener parámetros de marcha y el factor de correlación cadera-rodilla fue necesario analizar la forma de caminar de nueve varones de fenotipo mexicano. El objetivo es utilizar la información del análisis de marcha para desarrollar un algoritmo que estime el ángulo de rodilla únicamente monitoreando el ángulo de cadera. Primero, se realiza un análisis de marcha que determina parámetros de diseño.
Posteriormente, se analizan los datos con el fin de utilizar un modelo de regresión acorde a la dispersión de datos. Finalmente, se desarrolla el algoritmo que estima el ángulo de rodilla a partir del ángulo de cadera.
a) Análisis de marcha
Se analizó la marcha de nueve sujetos de fenotipo mexicano con edades de entre 22 y 25 años de edad. Los sujetos conocían los procedimientos del experimento y dieron su informe de consentimiento por escrito, el cual fue revisado por un comité de ética. La Tabla 1 muestra datos antropométricos y fenotipo de los sujetos analizados. Para el análisis se utilizó la metodología y sistema de medición, instrumentado con acelerómetros, reportado en [23].

Se utilizó el modelo cinemático de la Figura 2 (a), el cual emula las extremidades inferiores. El modelo cinemático tiene su marco de referencia en la articulación de cadera; el muslo está representado por L1 y la pierna por L2. El ángulo de cadera se representa por q1 y, el ángulo de rodilla por q2 Se colocaron dos acelerómetros en cada miembro inferior como se muestra en la Figura 2 (b). La estimación de ángulos articulares de cadera (q1) y rodilla (q2) se llevó a cabo mediante el polígono de aceleraciones reportado en [23].

Figura 2 Modelo cinemático para análisis de marcha con acelerómetros: (a) modelo cinemático, y (b) posición de acelerómetros.
Durante el análisis de marcha, cada sujeto registró entre 7 a 9 ciclos. Para cada sujeto se obtuvo un ciclo de marcha representativo, el cual es muy cercano a valores medios del conjunto de ciclos que fueron registrados para cada sujeto.
De esta forma, en la Figura 3 se presentan los ángulos de cadera y rodilla de nueve sujetos; como se puede observar los ángulos tienden a seguir un patrón de movimiento, el cual podría estar acotado por el fenotipo y antropometría de los sujetos. Se utilizó el coeficiente de correlación de Pearson para determinar la relación de movimiento entre cadera y rodilla. Asimismo, en la Figura 3, se puede observar que hay mayor correlación de movimiento de 0-20% y 80-100% del ciclo de marcha, en estos intervalos se obtuvo un factor de correlación de hasta 0.95. De acuerdo a los valores de correlación obtenidos, se consideró separar los movimientos de marcha en dos etapas: 1) movimientos donde el pie no está en contacto total con el piso- fase de oscilación y contacto de talón (de 0- 20% y 80-100% del ciclo), y 2) movimientos de contacto total del pie con el piso - fase de apoyo (de 20-80% del ciclo). Para identificar el ciclo de marcha, se analizó la velocidad angular de la cadera. Este análisis mostró mayor amplitud en movimientos de la fase de oscilación y que posteriormente, la velocidad disminuye a valores cercanos a cero. La disminución de velocidad indica una desaceleración para terminar el ciclo de marcha, tal como se observa en la Figura 4.


Figura 4 Velocidad de cadera durante la marcha: C indica el valor cercano a cero (indica fin del ciclo de marcha) y M indica el valor máximo de velocidad en fase de oscilación.
La Tabla 2 muestra el tiempo promedio de ciclo de marcha y valores característicos de las etapas 1 y 2 de los nueve sujetos. Se puede observar que los tiempos varían en relación al estilo caminar de cada sujeto.

b) Modelo de regresión lineal simple
La Figura 5 muestra la dispersión de datos para la etapa 1 y 2; se puede observar una tendencia lineal para la etapa 1, mientras que para la etapa 2 los datos no definen claramente su tendencia debido a valores atípicos por el estilo de caminar de las personas. Sin embargo, se puede observar que la mayoría de datos tienden a un comportamiento lineal.
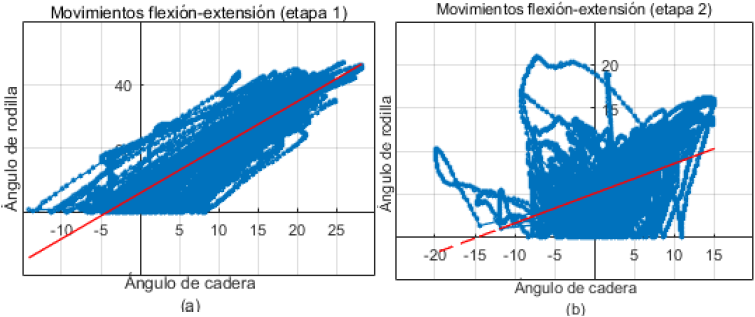
Figura 5 Dispersión de datos para diferentes movimientos del ciclo de marcha: (a) movimientos cuando el pie no está en contacto con el piso
Con base en los datos mostrados en la Figura 5, en este trabajo se propone utilizar un modelo de regresión lineal simple, para la etapa 1 y 2. Con este modelo se pretende encontrar la ecuación que mejor se ajuste a la dispersión de datos articulares. La dispersión de datos de la etapa 1 y 2 se obtuvo a través de Matlab®. La gráfica de dispersión mostró una relación lineal cuya tendencia puede aproximarse con un modelo de regresión lineal simple [24].
 (1)
(1)
donde Yi es la variable dependiente, Xi la variable independiente, Ui el error y, B1 y B2 son los estimadores que minimizan el error.
Se utilizó el método de mínimos cuadrados para obtener los estimadores B1 y B2 que minimicen la sumatoria del error al cuadrado, es decir, minimizar el error como se muestra a continuación.
 (2)
(2)
De esta forma, después de aplicar mínimos cuadrados tenemos los estimadores.
 (3)
(3)
 (4)
(4)
donde
Así, el modelo de regresión ajustado para las etapas 1 y 2 se determina por la siguiente ecuación.
 (5)
(5)
De esta forma, los estimadores para la etapa 1 se obtienen con las Ecuaciones 3 y 4, y los de datos de cadera y rodilla etapa 1 (ver Tabla 2).
 (6)
(6)
 (7)
(7)
Finalmente, la ecuación que mejor se ajusta para la etapa 1 es:
 (8)
(8)
De la misma forma, los estimadores para la etapa 2 se calculan de los movimientos presentados en la Tabla 2 (movimientos de etapa 2) y las Ecuaciones 3 y 4. Así, los valores de los estimadores para la etapa 2 son:
 (9)
(9)
 (10)
(10)
Con los valores de los estimadores se obtiene la ecuación que mejor aproxima los datos en la etapa 2.
 (11)
(11)
En este trabajo, se propone utilizar dos modelos de regresión lineal (Ecuaciones 8 y 11) para estimar la posición de rodilla a partir de la posición de cadera y parámetros de marcha.
c) Algoritmo de estimación de trayectoria
Para desarrollar el algoritmo se utilizó la velocidad angular de cadera para identificar cada ciclo de marcha. También, se consideraron los valores de flexión y extensión de cadera. El algoritmo está condicionado para perder el primer paso del miembro dominante; posteriormente, el algoritmo identifica el inicio del ciclo de marcha y empieza la estimación del ángulo de rodilla.
A continuación se presenta la metodología aplicada al algoritmo para separar movimientos para etapa 1 y 2.
1. Se establece un ángulo que pueda ser considerado como movimiento de marcha, para este caso se estableció un ángulo de 13◦, es decir, para un ángulo mayor se considera un movimiento de marcha. Este valor se establece con base en los parámetros de marcha.
2. Identificar el valor de velocidad cercano a cero. De acuerdo a los resultados del análisis de marcha, en la fase de oscilación se registra la mayor velocidad angular, inmediatamente después la velocidad se reduce a valores cercanos a cero (ver Figura 4). Esto se realizó a través del criterio de la primera derivada.
3. Identificar cuando el miembro inferior adopta una posición vertical, en esta posición el ángulo de cadera es cercano a cero.
4. Identificar la posición de pre-oscilación, en esta fase el ángulo de cadera presenta ángulo negativo, así que se aplica el criterio de la primera derivada para determinar un mínimo local. Esto indica el inicio de movimientos de flexión.
La Figura 6 muestra el algoritmo que permite estimar el ángulo de rodilla si únicamente utilizando el ángulo de cadera y parámetros de marcha. Como se puede observar, el algoritmo utiliza la velocidad dela cadera para identificar el inicio del ciclo de marcha. También, se utiliza un retardo de 0.6 s para garantizar que el valor negativo si del ángulo de cadera corresponde a la fase de oscilación. Asimismo, una vez identificado la fase de pre-oscilación utilizamos el criterio de la primera derivada para identificar el mínimo local.

Resultados
Como se puede ver en la Figura 6, el algoritmo de estimación de trayectoria se basa en el análisis de marcha. Esto permitió extraer los principales parámetros para obtener los valores de los estimadores implementados en los modelos de regresión. Se utilizó el coeficiente de correlación de Pearson para separar los movimientos de marcha en dos etapas. Además, se utilizó la velocidad angular para identificar el ciclo de marcha.
La validación del algoritmo se llevó a cabo con datos registrados de nueve sujetos de fenotipo mexicano (ver Tabla 1). Primero se seleccionan los datos del miembro inferior dominante del sujeto de prueba, este puede ser cualquiera registrado en la Tabla 1. Posteriormente, con el ángulo de cadera y parámetros de marcha, el algoritmo estima el ángulo de rodilla correspondiente para ese ángulo de cadera. El propósito es lograr que los ángulos estimados de rodilla se aproximen a los valores reales.
La Figura 7 muestra ángulos articulares del miembro inferior dominante de seis ciclos de marcha, del sujeto 1 (ver Tabla 1). Como se puede observar, el ángulo estimado de rodilla (línea punteada), tiende a seguir al ángulo de rodilla real (línea roja). De acuerdo al algoritmo presentado en la Figura 6, la estimación inicia en el segundo ciclo de marcha, de esta forma se garantiza que el ángulo negativo corresponde a la fase de oscilación. Posteriormente, el algoritmo identifica el final e inicio del ciclo a través de la velocidad angular, que de acuerdo al algoritmo debe ser cercana a cero.

Figura 7 Ángulos articulares del miembro inferior dominante: ángulo de cadera (línea azul), ángulo real de rodilla (línea roja) y ángulo de rodilla estimado (línea punteada).
Para evaluar el desempeño del algoritmo, se utilizó la raíz cuadrada del error cuadrático medio (RMSE por sus siglas en inglés). El RMSE es un índice para evaluar el desempeño de un modelo de estimación [25]. Así, el RMSE está determinado por:
 (12)
(12)
donde Yi es el valor real del ángulo de rodilla,
Considerando el ciclo completo (etapas 1 y 2), el promedio de error de los nueve sujetos fue de 8.25. Con un valor máximo de 9.01 presentado por el sujeto 5 y un mínimo de 7.15 presentado por el sujeto 8.
Discusión
Actualmente, una de las alternativas para rehabilitación por amputación transfemoral son las prótesis inteligentes, las cuales aseguran un mayor confort y menor gasto metabólico. Estas prótesis, según los fabricantes, pueden adaptarse a la marcha del usuario [26,27]. Sin embargo, a pesar que existen diferentes métodos para el control de prótesis inteligentes transfemorales, aún no ha sido posible recuperar la coordinación natural que tenía la persona antes de la amputación. Las causas principales podrían ser: 1) utilizar parámetros de marcha estándar como referencia y 2) no consideraran la correlación natural entre articulaciones durante la marcha.
En la literatura se han reportado estudios de marcha desarrollados en laboratorios de biomecánica instrumentados con cámaras, plataformas de fuerza y equipos para señales EMG. Asimismo, en los últimos 10 años, se han desarrollado nuevos métodos, para analizar la marcha humana, a través de sensores inerciales. Sea por laboratorios de biomecánica o por sensores inerciales, el objetivo es caracterizar la marcha normal y patológica. No obstante, estimar el ángulo en prótesis transfemorales inteligentes en marcha normal, a través de un miembro residual o el miembro complementario sano, ha sido tema de investigación [4-6, 9-11]. En [14] reportaron un algoritmo para estimar el ángulo deseado de rodilla a partir de señales EMG y redes neuronales; de acuerdo con el autor, el tiempo de entrenamiento de las redes neuronales limita la implementación del método por lapsos de tiempo largos, incluso en horas. En [11] se desarrolla un algoritmo para estimar el ángulo de una prótesis a través de señales EMG y redes neuronales, el ángulo fue estimado en función del miembro inferior sano. La mayoría de los métodos para estimación de ángulos de prótesis transfemorales se basa en señales EMG y redes neuronales. No obstante, el costo computación por entrenamiento de redes neuronales se incrementa en función del número de capas, por tanto, no es factible realizar algoritmos en tiempo real [4,14]. Además, las señales EMG son susceptibles a ruido por señales intrínsecas y extrínsecas del cuerpo, los electrodos tienden a moverse y es necesario usar filtros digitales para el tratamiento de señales EMG.
En este trabajo se analizó la marcha de nueve sujetos de fenotipo mexicano. Los resultados mostraron correlación de movimiento entre cadera y rodilla durante la marcha. Esta correlación fue fundamental para desarrollar un algoritmo que estima el ángulo de rodilla en tiempo real, a partir del ángulo de cadera. El algoritmo utiliza dos modelos de regresión lineal, los cuales utilizan parámetros de marcha presentados en la Tabla 2. El algoritmo no utiliza ningún tipo de filtro.
En la Figura 7 se puede observar la correlación natural entre ángulos de cadera (línea azul) y rodilla (línea roja); los movimientos de la etapa 1 presentan una mayor correlación respecto a los movimientos descritos por la etapa 2. Sin embargo, con base en el índice RMSE, el mayor error puntual se presentó en la etapa 1 con valores de hasta 11◦. Esto se originó por el pequeño desfasamiento entre ángulo real y estimado. Además, se debe considerar que en la etapa 2 el ángulo real no supera los 10°.
Los resultados indican que es posible estimar el ángulo de rodilla a partir de la posición del muñón y parámetros de marcha. La estimación se realiza en tiempo real sin que ésta sea afectada por cambios de velocidad en la marcha. El algoritmo propuesto responde adecuadamente ante cambios de velocidad de marcha, que de acuerdo a la Tabla 2, los nueve sujetos, con diferente antropometría, presentan distintos tiempos de ciclo de marcha (diferentes velocidades). Como trabajo futuro, se considera implementar el algoritmo en el control de prótesis transfemorales inteligentes, con el propósito de mejorar la coordinación entre prótesis y cuerpo humano. El algoritmo tiene la ventaja de utilizar sólo un sensor en el muñón para estimar la posición de la prótesis, esto podría reducir el costo de la prótesis. Además, el algoritmo se basa en datos de marcha de un grupo de personas, con datos antropométricos similares a los datos del usuario, por lo cual se podría diseñar prótesis más ad-hoc a los usuarios.
Conclusiones
El algoritmo puede estimar el ángulo de rodilla sin importar los cambios de velocidad en la marcha. La estimación del ángulo de rodilla se realiza en tiempo real, y dada la naturaleza de las ecuaciones 8 y 11, cualquier variación en ángulo de cadera debido a los cambios de velocidad en la marcha, serán capturados correctamente.
El estilo de caminar de cada persona es único, sin embargo, la similitud de patrones de movimiento en personas con mismo fenotipo y datos antropométricos similares establecen un patrón de movimientos acotado, el cual podrían ayudar, a través de inferencia estadística, a recuperar parámetros de marcha que son perdidos con la amputación.

