











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
De acuerdo con el último reporte disponible del Landmine and Cluster Munition Monitor, que incluye estadísticas de explosiones por minas antipersonal (MAP) a nivel mundial, en 2013 se registró un total de 3,308 víctimas, de las cuales 2,218 personas sobrevivieron con lesiones físicas. Colombia es el segundo país más afectado por MAP (368 víctimas en 2013), encontrándose por encima de países como Pakistán (219 personas), Siria (201 personas) o Iraq (124 personas), y siendo sólo superado por Afganistán (1050 personas) [1].
Según el reporte de víctimas, alrededor del 40 % de las explosiones en Colombia debido a MAP involucran lesiones de miembros inferiores. Solamente el fenómeno de las amputaciones, consecuencia de las MAP, representa más del 16 % del total de lesiones en esta zona del cuerpo [2].
Los efectos de la explosión derivada de las MAP se pueden clasificar en inmediatos y secundarios. Entre los efectos inmediatos se cuentan amputación, fracturas, luxaciones, lesiones miotendinosas, quemaduras, contaminación bacteriana por cuerpos extraños y lesiones vasculares y de nervio periférico. Entre los efectos secundarios se tiene isquemia, síndrome compartimental, infección, no unión de fracturas, deformidad, parálisis y dolor [3]. Una vez superados todos los procedimientos llevados a cabo durante la hospitalización, se prosigue con la rehabilitación física y reintegración socio-económica del paciente. Esta rehabilitación física puede requerirse durante el resto de su vida y está basada principalmente en la recuperación de la movilidad, lo cual incluye poder caminar nuevamente. Esto podría lograrse con la ayuda de miembros artificiales (prótesis) o de aparatos para apoyar la disfunción de un miembro (órtesis) [4].
El proceso de rehabilitación de una víctima de MAP involucra una parte pasiva y una parte activa [5]. La rehabilitación pasiva está enfocada a la adaptación de la prótesis al muñón y al manejo de la misma, mediante ejercicios dirigidos al mejoramiento del equilibrio, así como también ejercicios para el fortalecimiento del muñón gracias a la acción del fisioterapeuta encargado. En la rehabilitación activa el paciente cuenta con la competencia para realizar por su propia acción los ejercicios establecidos por el fisioterapeuta, tales como caminar sobre diferentes superficies como rampas, escaleras o el uso de bicicletas estáticas. Con lo anterior se busca fortalecer el muñón, mejorar las habilidades de movilidad con la prótesis, así como también mejorar las capacidades aeróbicas del paciente [6], [7], [8].
Las bicicletas han sido utilizadas en la rehabilitación y en la valoración de las capacidades cinéticas y cinemáticas de personas, por ejemplo, Ranky et al. [9] reportaron que agregar juegos a bicicletas estáticas ha permitido crear juegos de realidad virtual para rehabilitación física.
En la actualidad algunos de los métodos investigados para la rehabilitación de pacientes son los juegos serios. Sawyer [10] los clasifica como aquellos que aprovechan las bondades que ofrecen los videojuegos, destacando el entretenimiento como su principal virtud, para obtener un propósito más útil. Miller et al. [11] plantean que son aquellos que tienen un enfoque educativo en vez del entretenimiento. En otras palabras, se puede entender como ‘serios’ los juegos con propósitos de entrenamiento, educación, desarrollo de habilidades y rehabilitación, entre otros.
Se considera que alrededor del 40 % de todos los juegos serios están dirigidos a la rehabilitación y a la salud, los cuales se han desarrollado con el fin de brindar ayuda a personas con patologías en sus miembros [12]. Entre ellos se destacan los trabajos realizados por Chen et al. [13], quienes presentaron el control de un videojuego por medio de placas de fuerza, las cuales, además de brindar las indicaciones de movimiento dentro del juego, sirven como indicador de la fuerza normal aplicada para poder determinar la evolución en el desarrollo de la potencia muscular. Domínguez y García presentaron un cicloergómetro, el cual consiste en una bicicleta para manos, donde el paciente maneja un videojuego de carreras de autos, en el cual, mediante los impulsos en los pedales, se controla la velocidad y la dirección del vehículo; esto es un incentivo para aumentar el consumo de oxígeno y la frecuencia cardiaca [14], [15]. Ranky et al. [9] presentaron un sistema modular para bicicletas estáticas con una interfaz virtual para rehabilitación: el sistema fue desarrollado con el fin de monitorear parámetros fisiológicos y biomecánicos, y se compone de un computador para la simulación y los procesos de adquisición de información, sensores de presión en el manillar para hacer girar el jugador dentro de la pista y unidades de medición inercial en los pedales para medir la velocidad del pedaleo del usuario. El sistema fue probado con 5 sujetos sanos. Otros sistemas permiten medir, de manera indirecta mediante un sensor óptico de bajo costo, la velocidad de pedaleo [16], [17] y, otros utilizan el concepto de sensores de fuerza en los pedales [9], [18]. Realizar esta lectura permite al fisioterapeuta comparar el miembro lesionado con el miembro en buen estado, de forma que se puedan tener datos a medida que el paciente realiza la rehabilitación, y por lo tanto se pueda analizar su progreso.
Siendo conscientes de la problemática de las MAP, se considera relevante diseñar una solución para la rehabilitación de miembros inferiores para víctimas, por lo tanto se presenta un desarrollo conceptual de un sistema de adquisición de datos para la rehabilitación. Dicha solución incorpora una bicicleta estática comercial, sensores de fuerza ubicados en los pedales y un videojuego de carreras de autos, lo cual brinda una solución interactiva que permite realizar ejercicios para mejorar la coordinación interarticular e intermuscular y, en caso de amputación, mejorar la propiocepción con prótesis.
En el artículo primero se presenta una descripción del sistema de adquisición de datos para rehabilitación, sus componentes, funcionamiento y descripción de las pruebas realizadas. Luego se muestran los resultados de la caracterización de los sensores y del funcionamiento del sistema, seguidamente se presentan los resultados de la encuesta de percepción realizada a 20 fisioterapeutas. A continuación se analizan los resultados obtenidos de los experimentos y, finalmente, se presentan las conclusiones y propuestas para trabajos futuros.
Descripción y caracterización del sistema
Se desarrolla una solución que integra el ejercicio sobre una bicicleta estática con sensores y pulsadores de mando, fáciles de utilizar por pacientes en rehabilitación, y un videojuego de automóviles.
Descripción del sistema
En la Figura 1 se presenta el sistema de adquisición de datos, allí se puede observar la ubicación de los sensores de fuerza Flexiforce A201 en los pedales, un sensor óptico TCRT5000 en la rueda de la bicicleta y pulsadores de mando en el manillar de la bicicleta estática.

Adicionalmente el sistema utiliza dos microcontroladores ATmega32u4 programados con la plataforma electrónica Arduino, un computador con procesador Intel® CoreTM i5 con 8 GB de memoria RAM, una interfaz gráfica creada en el entorno de desarrollo LabVIEWTM y un videojuego. La Figura 2 muestra los tres diferentes videojuegos de automóviles con los cuales fue probada la aplicación, dos con licencia libre llamados SuperTuxKart y Speed Dreams, los cuales se presentan en las Figuras 2a y 2b, respectivamente, y uno de bajo costo con licencia comercial llamado Open Karts el cual se presenta en la Figura 2c. El criterio de selección de los videojuegos fue la facilidad para el sujeto en rehabilitación, de modo que este sólo tuviera que realizar dos acciones, pedalear para controlar la velocidad y girar con los pulsadores de mando.

Figura 2 Tres diferentes videojuegos de automóviles; (a) SuperTuxKart, (b) Speed Dreams y (c) Open Kart; con los cuales fue probada la aplicación.
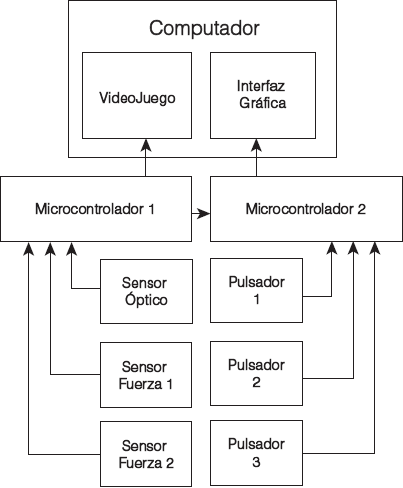
El diagrama de bloques con la interconexión de cada uno de los componentes se presenta en la Figura 3, en donde se observa que el microcontrolador 1 está asociado a la lectura del sensor óptico, los sensores de fuerza y al control del videojuego; y el microcontrolador 2 está asociado a la lectura de los pulsadores de mando y al control de la interfaz gráfica. En el primer microcontrolador se programó un firmware que permite ser controlado por LabView y en el segundo un firmware de emulación de teclado de computador, además, existe una interconexión entre ambos microcontroladores. Se estableció que era más conveniente el uso de dos microcontroladores en el sistema debido a su bajo costo comparado con DSPs o FPGAs.
El funcionamiento del videojuego se logra por medio de dos sistemas:
• El primer sistema controla la velocidad del automóvil en el videojuego, por medio de la acción de pedaleo del paciente en rehabilitación. A medida que se logra la velocidad definida por el fisioterapeuta, se envía la orden de movimiento al videojuego y este responde con el movimiento del automóvil, el cual se encuentra en una carrera cuyo objetivo será alcanzar el primer lugar.
En la Figura 4 se presenta el sistema que controla la velocidad del automóvil, el cual hace uso de un sensor óptico utilizado como encoder, ubicado sobre la rueda de la bicicleta estática, para medir indirectamente la velocidad de pedaleo. Este sensor se encuentra conectado al microcontrolador 1 para validar si la velocidad de pedaleo cumple con la condición mínima, definida por el fisioterapeuta, a través de la interfaz gráfica. Adicionalmente en el microcontrolador 1 se realiza la adquisición del valor de la fuerza ejercida por el paciente sobre los pedales de la bicicleta estática. Para esto se usaron los sensores flexiforce ubicados sobre los pedales. Aunque la variable fuerza no cumple un papel en el videojuego, su registro es de vital importancia para la rehabilitación ya que las curvas proporcionadas en la interfaz gráfica de la fuerza ejercida por ambos miembros sobre cada uno de los pedales de la bicicleta estática, permite al fisioterapeuta comparar el miembro lesionado con el miembro en buen estado, de forma que se puedan tener datos a medida que el paciente realiza la rehabilitación, y por lo tanto se pueda analizar su progreso.
• El segundo sistema consta de pulsadores de mando ubicados en el extremo del manillar de la bicicleta estática, con el fin de no interferir con el punto en el que el usuario debería sujetarse. Estos pulsadores tienen la función de dar dirección al automóvil en el videojuego y, de esta manera, tener control sobre el movimiento del lado derecho y del lado izquierdo. En la Figura 5 se presenta la disposición de los pulsadores de mando. Con el fin de integrarlos con el videojuego se realizó un programa que emula tres diferentes teclas del computador y, por medio de la lectura de tres entradas digitales del microcontrolador 2, se envían tres comandos diferentes al videojuego, los cuales están asociados a la velocidad y sentido de giro del vehículo.


Esta conceptualización del juego está apoyada en los procesos de rehabilitación donde se usan bicicletas con el fin de mejorar la coordinación interarticular e intramuscular.
De igual manera está respaldada por las investigaciones en las que se agregan juegos a bicicletas estáticas para la rehabilitación física [9], [14], [15].
Caracterización del sistema
Previo a la realización de los experimentos sobre el sistema de adquisición de datos, se caracterizaron cada uno de los sensores presentes en el mismo.
Sensor óptico TCRT5000
Su funcionamiento se basa en la reflexión de la luz infrarroja emitida y recibida por el mismo. La señal de salida emitida por éste se caracteriza por tener un valor de 5 V cuando se encuentra en una zona que absorbe la luz, por ejemplo en la sección negra de la rueda y arroja un valor de 0 V cuando se encuentra en la zona blanca marcada sobre la rueda de la bicicleta. El radio de la rueda es de 15 cm, por tanto, el diámetro corresponde a una medida de 30 cm.
La caracterización del sensor se basó en tres etapas desarrolladas con LabVIEWTM:
• En la primera etapa, con el fin de garantizar que el sensor fuera apto para la aplicación, se verificó el tiempo de respuesta de este. Para ello se utilizó un osciloscopio fabricado por Agilent technologies con referencia MSO-X 2014A y se detectó el tiempo del flanco de subida y de bajada en la señal de salida del sensor, lo cual significa el tiempo que demora el sistema en detectar el cambio de color. Con el valor medido se calculó la velocidad máxima con la que el usuario puede pedalear el equipo para ser correctamente monitoreado.
• En la segunda etapa se realizó la digitalización de la señal mediante un conversor análogo digital de 8 bits, para esto se estableció una lógica negada, en la que para valores mayores a 1 V, el estado de la señal digital será off (0) y para valores menores a 1 V, el estado de la señal digital será on (1).
• En la tercera etapa se capturaron los tiempos para cada uno de los estados del sensor, tanto para el estado on como para el estado off, esto con el fin de implementar un contador de pulsos para determinar el tiempo transcurrido en cada vuelta de la rueda y de esta manera poder calcular la velocidad de pedaleo.
Teniendo en cuenta el resultado del tiempo de respuesta del sensor y el cálculo de velocidad máxima que este puede detectar, se analiza que no existe limitante para el uso del sistema en rehabilitación, incluso que es posible utilizarlo en sesiones de entrenamiento en personas sanas o en deportistas de alto rendimiento. Es de anotar que el límite del sensor significa la velocidad máxima que detecta, es decir, si la velocidad es muy baja como se espera en pacientes en procesos de rehabilitación no hay ningún inconveniente porque siempre se medirá correctamente la velocidad.
Dado que la señal de aceleración del auto dentro del videojuego está dada por una validación de tiempo entre cada uno de los pulsos del sensor, se realizó un control del tiempo mínimo entre estos, con el fin de dar el ajuste óptimo según sea el progreso de la rehabilitación del paciente. En otras palabras, cuanto más avanzado sea el proceso de rehabilitación del paciente, se podrá ajustar un tiempo más corto, de forma que el esfuerzo que deberá realizar el paciente será mayor para lograr sobrepasar dicho ajuste y, por lo tanto, tendrá que realizar el ejercicio a una mayor velocidad.
Sensores de fuerza Flexiforce A201
Dado que el área sensible del sensor A201 es pequeña, se diseñó en acrílico la pieza mecánica que se muestra en la Figura 6, que permitiera distribuir la fuerza sobre el área sensible del sensor.

Figura 6 Pieza mecánica para distribuir el peso sobre el sensor de fuerza. (a) Modelo 3D, (b) Dibujo técnico.
Para caracterizar los sensores de fuerza se implementó un circuito divisor de tensión en el que una de las resistencias era el sensor de fuerza y la otra era una con un valor nominal de 100 kΩ. Con este circuito implementado se procedió a aplicar 11 diferentes pesos calibrados, directamente sobre el sensor, con el fin de obtener una curva característica para cada uno de los sensores y poder determinar la relación entre el peso aplicado y la tensión o voltaje de salida. Estos pesos se aumentaron en pasos de 0.5 kg, entre 0 kg y 5 kg haciendo tres repeticiones en cada registro, para un total de 33 datos. El valor de la tensión obtenida a la salida del circuito se midió con el microcontrolador 1 a través de un conversor análogo digital de 8 bits. Los tres datos correspondientes al mismo peso fueron promediados y con los datos obtenidos, se realizó una regresión lineal para obtener un modelo lineal con el fin de calibrar el sistema. Se realizó una comparación entre los valores reales de cada uno de los pesos calibrados y los valores calculados en LabVIEWTM mediante el uso de los datos entregados por los sensores y la ecuación así obtenida.
Las medidas tomadas para el experimento descrito son suficientes teniendo en cuenta la regla de oro reportada por Harrell et al. [19] y por Peduzzi et al. [20] donde para tener resultados confiables en un modelo de regresión lineal se requieren mínimo 10 eventos por variable independiente, con lo cual para el caso específico que se presenta se requerirían 20 datos.
En la Figura 7a se presenta una gráfica de la tensión obtenida por el sensor ubicado en el pedal 1 para cada uno de los pesos calibrados y en la Figura 7b se presenta la gráfica equivalente para el sensor ubicado en el pedal 2. En ambas figuras se representan, por medio de puntos, los valores medidos y, con una línea continua, la tendencia lineal de los datos, obtenida mediante la regresión lineal. A partir de éstas se obtuvieron dos ecuaciones con las cuales se calcula la fuerza ejercida en cada uno de los pedales a partir de las mediciones de voltaje.

Figura 7 Curvas de caracterización de los sensores de fuerza ubicados en el (a) pedal 1 y (b) pedal 2.
La fuerza para el pedal 1 está dada por
 (1)
(1)
y para el sensor del pedal 2 la fuerza está dada por
 (2)
(2)
en las cuales, f1 y f2 son las fuerzas aplicadas sobre los sensores 1 y 2 respectivamente, con la fuerza dada en N Newton y la tensión V voltios. Las curvas de calibración de carga sobre los pedales obtenidas en el sistema presentado por Ranky et al. [9] tienen un coeficiente de determinación R2 de .9945 y .9977 para el pedal derecho e izquierdo, respectivamente. Los modelos obtenidos mediante la regresión lineal de los sensores de fuerza para el sistema propuesto en este artículo tiene un R2 ajustado de r = .9963,p < .001 y .9963, p < .001 para los sensores 1 y 2, respectivamente.
En la Tabla 1 se presentan los errores relativos y los valores de la desviación estándar obtenidos en la pruebas de los sensores de fuerza para cada uno de los dos pedales de la bicicleta estática. A partir de los datos tomados en el proceso de caracterización de los sensores de fuerza se calculó la mediana del error de indicación como la mediana de las diferencias entre las medidas realizadas con el equipo y el valor real del peso calibrado. La mediana del error de indicación fue de 0.323kgf para el sensor 1 y 0.273kgf para el sensor 2. Adicionalmente se calculó la exactitud y la precisión. La exactitud promedio del sensor 1 fue de 0.430kgf y la precisión fue de 0.248 kgf . La exactitud promedio del sensor 2 fue 0.578 kgf y la precisión 0.224 kgf .

Los resultados obtenidos en cuanto a la medición de fuerza fortalecen la idea de usar el sistema de adquisición de datos para rehabilitación de víctimas de MAP, teniendo como ventaja importante que el sistema electrónico puede ser fácilmente adaptable a necesidades más exigentes que pudieran presentarse.
Los resultados de la mediana del error de indicación calculados en 0.323kgf para el sensor 1 y en 0.273kgf para el sensor 2 permiten visualizar la utilidad del sistema para la aplicación de medición de fuerza en miembro inferior. Lo anterior se hace más explícito al comparar dichos resultados con los datos proporcionados por la literatura de la misma variable medida en varios dinámometros manuales utilizados para la misma aplicación. Amaral et al. [21] realizaron un estudio comparativo entre tres dinamómetros manuales que arrojó un valor de mediana de error de indicación de 2.694 kgf para la marca Takei®, 0.316 kgf para la marca Jamar® y 3.949kgf para un transductor de fuerza de la empresa EMG System do Brasil®. El resultado del presente trabajo, en este orden de ideas, es por tanto un valor intermedio a los de estos equipos que se usan comercialmente para la misma aplicación.
De requerirse mayor precisión en un caso futuro en el que se deba trabajar con otros grupos musculares, es posible mejorar las condiciones del hardware del sistema, por ejemplo aumentando el número de bits del conversor análogo digital. Adicionalmente, en caso de que se requiera mejorar el nivel de exactitud del sistema esto puede lograrse obteniendo un mayor número de pesos intermedios de calibración para garantizar una ecuación más cercana a la realidad.
Metodología
En primera instancia se realizó una evaluación del sistema de tal forma que este funcionara de forma adecuada para lo que fue diseñado. A partir de estos resultados se realizó una encuesta a 20 fisioterapeutas de de modo que se evaluara la aplicabilidad del sistema en el campo de la rehabilitación de miembro inferior para víctimas de MAP.
Funcionamiento del sistema
Para evaluar el funcionamiento del sistema de adquisición de datos se realizaron pruebas, con una persona sana, en la cual se configuró en la interfaz gráfica, presentada en la Figura 8, una velocidad asociada con la frecuencia de giro de la rueda, la cual debía ser vencida por la persona, de forma que, al momento de pedalear a una velocidad mayor, el sistema activara el movimiento del carro. Para estas pruebas se tomaron medidas de la fuerza ejercidas por ambas piernas en cada uno de los pedales, esto con el fin de observar las diferencias entre los miembros en cuanto a fuerza. En estas pruebas se pretendía evaluar el funcionamiento del sistema de adquisición de datos durante ejercicios de rehabilitación activa, en los cuales el sujeto movilizaba continuamente los pedales realizando un ejercicio isocinético.

Figura 8 Interfaz gráfica que incluye: a) Deslizador para definir el umbral mínimo de velocidad de pedaleo, b) Indicador de la velocidad de pedaleo del sujeto, c) Indicador de fuerza de pedaleo para cada uno de los pies d) Gráfica con los tiempos en alto y en bajo del sensor óptico.
Los datos de las dos curvas de fuerza de pedaleo, pertenecientes a las pruebas con la persona sana, fueron analizados estadísticamente con la prueba de Shapiro- Wilk utilizando un α de 0.05 con el fin de contrastar la normalidad del conjunto de datos y así evaluar la correlación entre ambas curvas. Estas curvas se desfasaron de manera iterativa con el fin de optimizar la correlación entre ellas y, de esta manera, conocer el desfase de fuerza en el que se encontraba la máxima correlación entre ambas curvas.
Encuestas a fisioterapeutas sobre la percepción del sistema de adquisición de datos
Teniendo en cuenta que se quiere determinar las potencialidades del sistema para pacientes en rehabilitación y específicamente los posibles usos para víctimas de MAP, se interactuó con profesionales del área de la salud conocedores de este tipo de casos, es decir, la pertinencia del sistema se identificó a partir de la observación de la prueba de concepto por parte de los fisioterapeutas.
Con el fin de evaluar la ergonomía, seguridad y la posibilidad de utilizar el sistema de adquisición de datos para rehabilitación de víctimas de MAP, se realizó un estudio con 20 fisioterapeutas sin conocimiento previo del proyecto. Cada uno de los fisioterapeutas visualizó un video del funcionamiento del sistema y la interacción del mismo con la persona sana. A continuación se respondieron las preguntas que surgieron sobre el funcionamiento y se aclaró que era adaptable a cualquier bicicleta usada en los procesos de rehabilitación con sus pacientes. Se le pidió a cada fisioterapeuta la confirmación de la comprensión del funcionamiento del sistema de adquisición y luego fue sometido a cuatro preguntas:
Las primeras tres preguntas debían ser calificadas de 1 a 7 teniendo en cuenta una escala Likert con los siguientes niveles de respuesta: Extremadamente bajo (1), Muy bajo (2), Bajo (3), Regular (4), Alto (5), Muy alto (6), Extremadamente alto (7).
La primera pregunta solicitaba calificar “De 1 a 7, ¿Cuál es el nivel de ergonomía que presenta el sistema para el sujeto que lo use teniendo en cuenta que es similar a los ya usados en rehabilitación”. La segunda pregunta requería evaluar “De 1 a 7, ¿Cuál es el nivel de concorancia entre los ejercicios que se pueden realizar con el sistema y los que se deben realizar para terapias de rehabilitación de miembro inferior?”. La tercera pregunta indicaba a los fisioterapeutas que debían calificar “De 1 a 7, ¿Cuál es el nivel de seguridad del sistema, teniendo en cuenta que no le haga daño físico al paciente?”. Finalmente, la cuarta pregunta pretendía que respondieran “Para qué terapias que requieran los pacientes víctimas de MAP con prótesis sería útil este sistema”, esto con el fin de descubrir la percepción sobre las potenciales aplicaciones del sistema para rehabilitación de personas víctimas de MAP. En este caso se les dió una gama con las siguientes diez posibilidades y cada fisioterapeuta debía indicar para cada una si era o no uno de los posibles usos o aplicaciones que el sistema podía tener para una persona protetizada como consecuencia de MAP:(a) reacondicionamiento cardio-respiratorio, (b) calidad muscular del lado no afectado, (c) movilidad y adaptación del socket, (d) retorno venoso, (e) retorno linfático, (f) ayuda para pacientes inmunosuprimidos, (g) resistencia a la fuerza, (h) autoestima, (i) seguridad y (j) autoimagen.
Cada fisioterapeuta tenía adicionalmente la posibilidad de incluir aplicaciones potenciales que no estuvieran en el listado suministrado y hacer comentarios u observaciones generales sobre el desarrollo. Los resultados obtenidos fueron tabulados para posteriormente ser analizados.
Resultados y discusión
Se presentan los resultados de las pruebas del sistema de adquisición de datos para caracterizar cada uno de los sensores. Primero se muestran los resultados de las pruebas relacionadas con el sensor óptico, luego se presentan los resultados correspondientes a los sensores de fuerza, posteriormente se presentan los resultados de funcionamiento del sistema completo. Por último se presentan los resultados de la encuesta de percepción de los fisioterapeutas.
Funcionamiento del sistema
Según las pruebas mencionadas para evaluar el funcionamiento del sistema de adquisición de datos, en la Figura 9 se presentan las curvas de fuerza obtenidas por cada una de las piernas de una persona durante ejercicios de rehabilitación sobre el sistema de adquisición de datos. En esta figura se presentan las curvas obtenidas durante un segmento de 10s y se representa por medio de una línea punteada los valores de la fuerza ejercida por el pie izquierdo y por medio de una línea continua la fuerza ejercida por el pie derecho. En esta figura se presenta un offset en las curvas de fuerza ejercidas sobre cada uno de los pedales, el cual es explicado por el hecho de que el usuario montado sobre la bicicleta es capaz de ejercer mayor fuerza con uno de sus miembros inferiores que con el otro, esto debido al miembro dominante. El miembro dominante del sujeto que participó en el estudio era el izquierdo, por tanto se corrobora la evidencia presentada en la Figura 9.
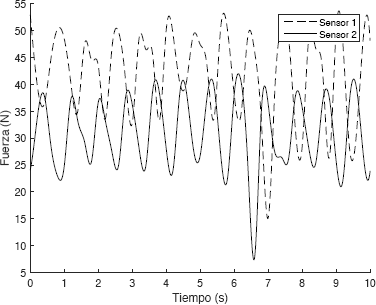
Figura 9 Curvas de fuerza ejercidas sobre cada uno de los pedales durante ejercicios de rehabilitación sobre el sistema de adquisición de datos.
Adicionalmente, las pruebas de Shapiro- Wilk para contrastar la normalidad del conjunto de datos de fuerza obtenidos durante la prueba con la persona sana, arrojaron un p-valor de 0.00007 para el sensor 1 ubicado en el pedal del pie izquierdo, y 0.00008 para el sensor 2 ubicado en el pedal del pie derecho. Debido a que el valor p obtenido en ambas pruebas es menor a 0.05, se puede rechazar la idea que la fuerza de pedaleo proviene de una distribución normal con un nivel de confianza del 95%. La correlación de Spearman máxima se obtuvo con un desplazamiento de 0.419 ms y fue de 0.873 con un p-valor de 0.00001. En este caso se utilizó la correlación de Spearman en vez de la correlación de Pearson, ya que para la segunda al menos una de las variables debe seguir una distribución de frecuencias normal y en este caso se rechazó el supuesto de normalidad.
El funcionamiento final del sistema con todos los sensores y dispositivos acoplados a éste tuvo los resultados esperados puesto que se logró realizar el control del avance del auto dentro del videojuego mediante el movimiento de los pedales de la bicicleta por parte de una persona, a la vez que se controlaba la dirección del mismo, mediante los pulsadores de mando ubicados en los extremos del manillar.
El terapeuta puede establecer velocidades mínimas que con el progreso de la rehabilitación van cambiando permitiendo un seguimiento cuantitativo, de hecho, la velocidad que logra medir el sensor supera la que puede tener un paciente en condiciones de rehabilitación, por lo cual no hay ningún inconveniente desde el punto de vista técnico en este sentido.
Adicionalmente, en la Figura 9, se muestra cómo se logró realizar un monitoreo continuo de la fuerza normal ejercida sobre los pedales de la bicicleta. Posteriormente, dicha información se exportó a una hoja de datos, con el fin de recuperar las gráficas de la fuerza que son previamente mostradas en la interfaz gráfica al fisioterapeuta, para así realizar un análisis de esta información y obtener los valores máximos, mínimos, promedios, entre otros, de la fuerza ejercida por cada uno de los miembros inferiores de la persona. Con estos valores, es posible determinar si existe, o no, un aumento en las mediciones de fuerza, lo que a su vez servirá para corroborar si hay progreso en el desarrollo de la fuerza del paciente y, por ende, analizar el estado del proceso de rehabilitación.
En la Figura 9 se observa que las fuerza están desfasadas 180◦. Esto se debe a que en el momento en que uno de los pedales se encuentra en subida, el otro se encuentra de bajada.
Las pruebas experimentales y sus análisis, por tanto, confirmaron la correcta escogencia de los sensores para la aplicación.
Adicionalmente, las pruebas de Shapiro- Wilk para contrastar la normalidad del conjunto de datos de fuerza obtenidos durante la prueba con la persona sana, arrojaron un p-valor de 0.00007 para el sensor 1 ubicado en el pedal del pie izquierdo, y 0.00008 para el sensor 2 ubicado en el pedal del pie derecho. Debido a que el valor p obtenido en ambas pruebas es menor a 0.05, se puede rechazar la idea que la fuerza de pedaleo proviene de una distribución normal con un nivel de confianza del 95%. La correlación de Spearman máxima se obtuvo con un desplazamiento de 0.419 ms y fue de 0.873 con un p-valor de 0.00001. En este caso se utilizó la correlación de Spearman en vez de la correlación de Pearson, ya que para la segunda al menos una de las variables debe seguir una distribución de frecuencias normal y en este caso se rechazó el supuesto de normalidad.
El funcionamiento final del sistema con todos los sensores y dispositivos acoplados a éste tuvo los resultados esperados puesto que se logró realizar el control del avance del auto dentro del videojuego mediante el movimiento de los pedales de la bicicleta por parte de una persona, a la vez que se controlaba la dirección del mismo, mediante los pulsadores de mando ubicados en los extremos del manillar.
El terapeuta puede establecer velocidades mínimas que con el progreso de la rehabilitación van cambiando permitiendo un seguimiento cuantitativo, de hecho, la velocidad que logra medir el sensor supera la que puede tener un paciente en condiciones de rehabilitación, por lo cual no hay ningún inconveniente desde el punto de vista técnico en este sentido.
Adicionalmente, en la Figura 9 se muestra cómo se logró realizar un monitoreo continuo de la fuerza normal ejercida sobre los pedales de la bicicleta. Posteriormente, dicha información se exportó a una hoja de datos, con el fin de recuperar las gráficas de la fuerza que son previamente mostradas en la interfaz gráfica al fisioterapeuta, para así realizar un análisis de esta información y obtener los valores máximos, mínimos, promedios, entre otros, de la fuerza ejercida por cada uno de los miembros inferiores de la persona. Con estos valores, es posible determinar si existe, o no, un aumento en las mediciones de fuerza, lo que a su vez servirá para corroborar si hay progreso en el desarrollo de la fuerza del paciente y, por ende, analizar el estado del proceso de rehabilitación.
En la Figura 9 se observa que las fuerza están desfasadas 180◦. Esto se debe a que en el momento en que uno de los pedales se encuentra en subida, el otro se encuentra de bajada.
Las pruebas experimentales y sus análisis, por tanto, confirmaron la correcta escogencia de los sensores para la aplicación.
Encuestas a fisioterapeutas sobre la percepción del sistema de adquisición de datos
Los 20 encuestados son profesionales del área de la fisioterapia, egresados de 3 universidades privadas colombianas, 4 de ellos especialistas y 4 estudiantes especialización. Respecto a los años experiencia profesional 3 tienen más de años de experiencia, 3 tienen entre 5 y años de experiencia, 12 tienen de 2 a 5 años de experiencia y 2 tienen de 0 a 2 años de experiencia y 2 tienen 0 a 2 años de experiencia.
Los resultados de la encuesta a los fisioterapeutas en cuanto a ergonomía, seguridad y concordancia de los ejercicios con los de la terapia tradicional se presentan agrupados en una escala dicotómica en la Tabla 2. De acuerdo con esta escala las respuestas con una valoración de Alto, Muy alto o Extremadamente alto fueron agrupadas en la categoría Alto; mientras que las respuestas con una valoración de Regular, Bajo, Muy bajo o Extremadamente bajo fueron agrupadas en la categoría Bajo.
Tabla 2 Resultados de percepción de fisioterapeutas en cuanto al nivel de ergonomía, seguridad y concordancia de los ejercicios con los de la terapia tradicional.

Los resultados de la pregunta a los fisioterapeutas relacionada con potenciales aplicaciones del sistema para pacientes víctimas de MAP fueron agrupados en la Tabla 3, donde se muestran el porcentajes de fisioterapeutas que estaba ’de acuerdo’ y en ’desacuerdo’ con que dicha aplicación era factible para el sistema de adquisición de datos para rehabilitación de víctimas de MAP.

A partir de los resultados presentados utilizando la escala dicotómica de la Tabla 2 los especialistas en rehabilitación consideran que el sistema es seguro, ergonómico y que permite realizar ejercicios necesarios en la rehabilitación de miembro inferior. Esta información es concluyente si se tiene en cuenta que en el análisis de las encuestas al menos un 70% de los fisioterapeutas valoraron en un nivel Alto el desempeño de estas variables en el sistema, categoría que se considera estricta si se tiene en cuenta que agrupa solamente los resultados con valoración Alto, Muy alto y Extremadamente alto y que excluye la valoración Regular en la cual el fisioterapeuta aún considera el sistema aceptable en cuanto a esa variable se refiere.
En el caso de la ergonomía se tienen algunas características positivas asociadas a la bicicleta estática comercial con la cual se desarrolló la implementación como espumas en el manillar y posibilidad de modificar la distancia del sillín y la biela.
Adicionalmente es posible adaptar el sistema de adquisición de datos a una bicicleta estática que posea una silla con espaldar, donde el paciente pueda estar más reclinado y con el peso mejor distribuido en la silla, de tal manera que se sienta más cómodo y seguro al realizar el ejercicio. Por tanto el sistema desarrollado puede adaptarse sin inconvenientes a una bicicleta con mejores características para un paciente víctima de MAP.
En el caso de la seguridad aplican condiciones similares a la ergonomía, dado que el sistema por sí mismo incluye las condiciones asociadas con una bicicleta estática que ya es usada en los procesos de rehabilitación de miembro inferior.
Las observaciones generales proporcionadas por los fisioterapeutas, permitieron identificar otros potenciales usos en el proceso de rehabilitación de víctimas de MAP: reacondicionamiento del miembro faltante, resistencia, fuerza, propiocepción y coordinación, autoconfianza, motivación, actividad física independiente de su condición, complemento al proceso de entrenamiento de marcha, coordinación interarticular e intermuscular, mejoría del engrama motor y mejoría del equilibrio y control postural. Estas últimas potencialidades, dado que fueron ideas de algunos terapeutas deben ser corroboradas con una muestra superior.
Los hallazgos anteriores van de acuerdo con investigaciones preliminares donde se muestra que con el uso de bicicletas estáticas en rehabilitación se puede fortalecer el muñón, mejorar las habilidades de movilidad con la prótesis y mejorar las capacidades aeróbicas del paciente [6], [7], [8].
Teniendo en cuenta que los fisioterapeutas fueron formados y tienen experiencia laboral en el segundo país más afectado por MAP en el mundo y por tanto conocimiento de las terapias de rehabilitación para estas lesiones, las encuestas también permitieron identificar potencialidades que el sistema tiene en terapias para estas víctimas, ya que la mayoría de afecciones de los lesionados requieren un proceso de rehabilitación física con el fin de recuperar entre otras las variables de movilidad y fuerza que son precisamente las que se trabajan en el presente desarrollo. Esto involucra una parte de rehabilitación pasiva y otra parte activa, en la cual se usan bicicletas estáticas.
En gran medida la impresión positiva es porque el desarrollo se convierte en un reto para el usuario y una ayuda a la concentración en una actividad paralela de entretenimiento mientras realiza el proceso de rehabilitación.
Si bien se recibieron comentarios negativos respecto a la ergonomía en el caso de la bicicleta específica utilizada para el desarrollo, es decir, con la cual se realizó la prueba, especialmente por los inconvenientes que traería utilizar dicha bicicleta en una persona protetizada en cuanto a estabilidad, hubo claridad en los fisioterapeutas que dicha situación se soluciona fácilmente adaptando el sistema a las bicicletas utilizadas en pacientes protetizados, de tipo Recumbent. Adicionalmente uno de los encuestados expresó sus intentos preliminares a nivel personal de implementar una idea parecida cuando, mientras realizaba entrenamiento físico con una bicicleta estática, practicaba un videojuego identificando que lograba mayor tiempo de entrenamiento. Una limitación que preliminarmente ha sido identificada en el sistema es que su uso prolongado, tal como sucede en el caso de algunos videojuegos, podría contribuir al desarrollo de patologías como Tenosinovitis de Quervain, por lo tanto es recomendable utilizarlo de acuerdo a las recomendaciones del fisioterapeuta.
Por último, dos fisioterapeutas hicieron énfasis en que el sistema solamente se puede usar en ciertas etapas de la rehabilitación y teniendo en cuenta el nivel de amputación del paciente.
Conclusiones
Se desarrolló una prueba de concepto de un sistema de adquisición de datos que se integra con un videojuego existente mediante dispositivos de mando localizados en una bicicleta estática a la cual se le integraron sensores de velocidad y fuerza. Lo anterior con el propósito de ser implementado en procesos de rehabilitación de miembros inferiores de víctimas de Minas Antipersonal (MAP), lo que finalmente hace que el sistema obtenido sea considerado un Juego Serio para rehabilitación, dado que su principal objetivo se centra en favorecer procesos de rehabilitación y habilidades en el usuario mediante una práctica orientada.
El sistema desarrollado cuenta con una bicicleta estática comercial, sensores sobre los pedales para medir la fuerza de pedaleo del usuario, un sensor óptico para medir la velocidad de la acción de pedaleo y pulsadores de mando en los extremos del manillar de la bicicleta para interactuar con el juego. Es adaptable a cualquier bicicleta estática y el paciente puede interactuar a través de él con diferentes juegos, de hecho, se probó para tres juegos diferentes de automóviles. Con el sistema, el terapeuta tiene la posibilidad de establecer la velocidad mínima requerida para la rehabilitación y analizar las fuerzas realizadas durante el pedaleo.
Se realizaron pruebas de caracterización del sensor de velocidad y los sensores de fuerza y una evaluación de desempeño del sistema completo con un usuario. En este contexto se determinaron ventajas importantes del sistema desde el punto de vista técnico en términos de la aplicación de interés.
El sistema fue considerado ergonómico y seguro por parte de un grupo de 20 fisioterapeutas que observaron su desempeño. El 70 % de los fisoterapeutas consideraron el sistema con un nivel Alto de ergonomía, el 80% consideraron que los ejercicios que pueden realizarse en el sistema tienen un nivel Alto de concordancia con la terapia tradicional y el 90% consideraron que el sistema tiene un nivel Alto de seguridad. Este resultado es alentador si se considera que la categoría Alto involucraba valoraciones de Alto, Muy Alto y Extremadamente Alto, pero no valoraciones de Regular o inferiores. Adicionalmente la encuesta a los fisioterapeutas reportó que el sistema permite realizar ejercicios de rehabilitación de miembro inferior de la terapia tradicional y tiene posibilidades de aplicación en múltiples terapias del proceso de rehabilitación de víctimas de MAP.
Se ratifican los adelantos del estado del arte en cuanto a las ventajas de los juegos serios y su potencial para rehabilitación, al igual que los beneficios que ofrece una bicicleta estática en terapias de rehabilitación, lo cual se convierte en una oportunidad teniendo en cuenta la alta incidencia de víctimas de MAP en el mundo y especialmente en varios países en vía de desarrollo.
Los resultados obtenidos se consideran útiles para una futura aplicación en rehabilitación de miembro inferior para víctimas de MAP en terapia activa. Además, fueron adecuados a las necesidades de la aplicación y el error en la medición se encuentra en el rango permitido para este tipo de sistemas. De hecho, debido a que el desarrollo electrónico es propio, es posible mejorar las condiciones de exactitud y precisión para tener potenciales aplicaciones en otras áreas con requerimientos más exigentes.
El sistema puede ser integrado a varios videojuegos disponibles, lo cual le da versatilidad, sin embargo, resulta conveniente desarrollar, como trabajo futuro, un videojuego propio, que permita una mayor interconexión con el sistema de adquisición de datos, a través de la integración de la medición de la fuerza, como variable fisiológica con el control de la interfaz. De hecho, se ha contemplado también como un trabajo futuro el desarrollo de juegos serios adicionales que permitan al usuario seleccionar la alternativa preferida dentro de una gama de posibilidades de acuerdo a sus gustos.
Por otra parte, teniendo en cuenta que el sistema de adquisición de datos no es invasivo y, por el contrario, presentó aceptación por parte de los fisioterapeutas por incluir un videojuego, se propone, en un futuro, realizar pruebas a un número determinado de pacientes víctimas de MAP con prótesis y de esta manera evaluar el funcionamiento del sistema de adquisición de datos durante ejercicios de rehabilitación activa, en los que el paciente moverá los pedales continuamente y realizará por su propia acción los ejercicios isocinéticos establecidos por un fisioterapeuta. Adicionalmente, se plantea la hipótesis de que el sistema no es exclusivo para rehabilitación de personas víctimas de MAP, por lo tanto se plantea que en un trabajo futuro se podrá probar dicho sistema, por ejemplo, con discapacitados por accidentes de tránsito o deportistas de alto rendimiento con lesiones deportivas.
De igual manera dentro del trabajo actual no se ha contemplado un análisis biomecánico relacionado con el paciente protetizado y su interacción con la bicicleta estática puesto que se parte del hecho que estas bicicletas ya se utilizan para este tipo de terapias. Sin embargo, como trabajo futuro, es interesante trabajar en dicho modelo, de tal manera que se tenga en cuenta la fuerza que aplica el paciente durante el pedaleo y su postura. Lo anterior cobra mayor importancia si se analiza que al utilizar una prótesis la postura del paciente cambia y es importante cuantificar el proceso y estudiar si a medida que realiza la rehabilitación pueden aparecer disfunciones adicionales.
Por último, con el fin de complementar los ejercicios de rehabilitación que se pueden realizar actualmente con el sistema de adquisición de datos, los cuales son solamente ejercicios de rehabilitación activa, como trabajo futuro se plantea incorporar un motor que permita realizar terapias adicionales, de tal manera que cuando el motor aplique un torque sobre los pedales para movilizar los miembros del sujeto, se podrían realizar terapias pasivas o asistidas. Finalmente, en el caso que el motor pueda aplicar un torque que se oponga al pedaleo del sujeto, se podrían realizan terapias resistidas, ya sea manteniendo la fuerza constante o no.

