











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Una vertiente de las ciencias exactas que incluye el estudio, desarrollo e innovación de tecnologías para fines médicos, como terapia o rehabilitación es la ingeniería biomédica. Es dentro de esta disciplina que se encuentra inmerso el desarrollo de interfaces mioeléctricas (EMG); una interfaz EMG es un dispositivo electrónico que hace uso de señales biológicas producidas por los músculos del cuerpo, las cuales son procesadas y analizadas por un circuito electrónico además de un software 1,2. Hoy en día el desarrollo de estos dispositivos va en ascenso, y su uso ya no solo se centra en el desarrollo de aplicaciones terapéuticas y de rehabilitación 3, 4, como el caso de las prótesis mioeléctricas 5, 6, 7,8, sino también para el control de robots 9, 10 y brazos robóticos 11; estas nuevas tendencias están orillando el desarrollo de interfaces mioeléctricas para el uso diario, ya sea para facilitar la vida diaria o también para usos de recreación y entretenimiento; por ejemplo el uso de dispositivos EMG en videojuegos o para reemplazar dispositivos de entrada salida de una PC como el mouse o el teclado 12. El análisis de la señal SEMG se basa en las características temporales, por lo general usando el valor de amplitud rectificado RMS 13.Sin embargo, las señales SEMG son muy complejas, aleatorias, no estacionarias, no lineales (sin relación lineal entre la actividad muscular y el patrón de señal de SEMG), y no se generan por fenómenos periódicos. Aunque estas técnicas logran caracterizar las señales SEMG, es necesario aplicar técnicas con perspectiva en la frecuencia para caracterizar completamente sus patrones. En términos de los parámetros del espectro de frecuencia como la transformada rápida de Fourier, que mide la amplitud de la señal sobre los componentes en frecuencia, o la frecuencia media instantánea, que muestra el valor promedio del espectro de frecuencia en un instante de tiempo 14. Además la señal SEMG está expuesta a sufrir cambios debidos a la fatiga muscular. Cuando ocurre fatiga en el músculo, la amplitud de la señal de SEMG aumenta, debido a que, como mecanismo de compensación de fatiga, los músculos intentan mantener la misma fuerza reclutando unidades motoras adicionales; pero cuando esto no es posible, la fuerza comienza a disminuir evidenciándose una reducción en la amplitud de la señal. Durante contracciones fatigantes, se presenta una reducción en la velocidad de conducción y, por lo tanto, de las frecuencias características de la señal; siendo la acumulación de ácido láctico una de sus causas 15.Esta reducción en la velocidad de conducción resulta en una compresión y un corrimiento del espectro de frecuencias hacia las frecuencias bajas. Así mismo, la frecuencia de activación de las unidades motoras, representada en la zona de bajas frecuencias del espectro de frecuencia SEMG, cambia como consecuencia del estado de fatiga. Por esto mismo es más conveniente realizar una caracterización de la fatiga utilizando los distintos parámetros en frecuencia de la señal SEMG ya que para determinar la fatiga se debe determinar la Densidad de Potencia Espectral (PSD) 16, 17.
Sistema de adquisición de señales
Electrodos
Los electrodos de superficiales son colocados directamente sobre la superficie de la piel y son capaces de tomar registros poblacionales de la actividad bioeléctrica. El uso de los electrodos superficiales es mucho más adecuado para el estudio del comportamiento promedio de la actividad eléctrica de un músculo o grupo de músculos, lo cual es muy utilizado para detectar fatiga muscular y para monitoreo del rendimiento de deportistas. Los materiales de los que se constituyen la mayoría de los electrodos de superficie son muy variables, entre ellos están la plata, el oro, acero inoxidable, platino entre otros.

Una de las condiciones deseables en un electrodo, es que no sea polarizado, esto significa que el potencial en el electrodo no debe de variar considerablemente cada vez que la corriente pase a través de él. El electrodo de plata cloruro de plata (Ag/AgCl) ha demostrado tener los estándares adecuados para lograr esta característica, además, la interfaz piel-plata o piel-Ag/AgCl tiene la mayor impedancia resistiva en el dominio de la frecuencia en SEMG 18. La adquisición de la señal se realizó por medio de electrodos superficiales de AgCl de gel sólido conductivo en configuración bipolar 19.
Etapa de amplificación
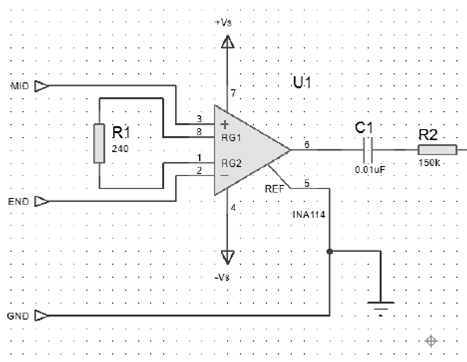
La señal generada por una unidad motora tiene una amplitud aproximadamente de 250 µV durante la contracción 20.Debido a que las señales mioeléctricas son de pequeña amplitud, el ruido ambiental o en mayor medida el ruido de línea (60Hz) puede provocar una falsa interpretación de los resultados. Por lo tanto, el amplificador de la unidad de procesamiento necesita ser no solo lo suficientemente sensible como para detectar y amplificar las pequeñas señales sino que también debe rechazar los ruidos para obtener solo actividad electromiográfica. Los amplificadores diferenciales permiten rechazar gran parte del ruido externo. Los amplificadores de instrumentación cumplen con esas características y están especialmente construidos para propósitos de instrumentación médica. A su vez permite variar el factor de amplificación con la modificación de un juego de resistencias. Para la etapa de amplificación se utilizó un amplificador diferencial INA114. El INA114 es un amplificador de instrumentación de bajo costo de propósito general que puede ofrecer una excelente precisión. Su versátil diseño y pequeño tamaño hacen que sea ideal para una amplia gama de aplicaciones. Con una sola resistencia externa se establece cualquier ganancia de 1 a 10.000.
La protección de entrada interna puede soportar hasta ± 40 V sin sufrir daños. El INA114 activa con muy baja tensión de desplazamiento (50µV), la deriva (0.25µV / ° C) y un alto rechazo en modo común (115dB a T = 1,000). Funciona con voltajes de tan sólo ± 2.25V, lo que permite su uso con sistemas alimentados por baterías y de abastecimiento individuales de 5V. Para calcular la ganancia del amplificador se utiliza la ecuación (1):
 1
1
Despejando y proponiendo una ganancia de 200, la resistencia calculada corresponde a 270 Ω. La figura 2 muestra el diagrama eléctrico correspondiente al amplificador utilizado para la interfaz SEMG.
Etapa de filtrado
Además de la amplificación se requiere filtrar la señal electromiografíca en la banda de 20 Hz a 300 Hz. Para ello se diseña un filtro integrador pasa bajas y un filtro derivador pasa altas de primer orden.
A. Filtro Integrador/Pasa bajas
Se utiliza un filtro activo integrador. Para calcular la frecuencia de corte se utiliza la siguiente ecuación:
 2
2
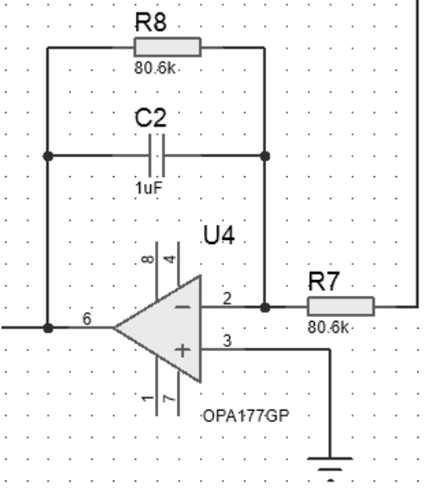
Se calcula a una frecuencia de corte de 300 Hz y se da un valor de Capacitor de 1 µF dando un valor de resistencia de 3.3 kΩ. La figura 4 muestra el circuito eléctrico del filtro integrador pasa bajas 300 Hz.
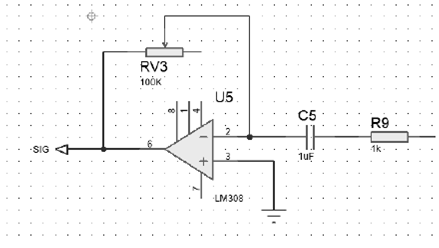
B. Filtro derivador /Pasa altas:
Se utiliza un filtro activo derivador. Para calcular la frecuencia de corte se utiliza la siguiente ecuación:
 3
3
Los valores correspondientes de R y C para una frecuencia de corte de 20 Hz son de 7.95 Khz y 1 µF respectivamente. La figura 5 muestra el diagrama eléctrico del circuito derivador pasa altas. Si se quiere una frecuencia de corte pasa altas de 20 Hz, entonces se despeja R en (3) y se sustituye en valor de frecuencia de 20 Hz, obteniendo una resistencia de 7.95 kΩ.

Se decidió colocar un potenciómetro de precisión de 10 kΩ con vueltas múltiples para ajustar la frecuencia de corte pasa altas.
Convertidor Analógico Digital
Para la adquisición de datos ADC desde el circuito sensor/amplificador SEMG se decidió utilizar los equipos compactDAQ de National Instruments junto con un módulo de entradas analógicas NI-9205. Esto debido a su versatilidad y Habilidad a la hora de adquirir señales para analizarlas.
A. NI CompactDAQ 9174
El NI cDAQ-9174 es un chasis USB de 4 ranuras diseñado para sistemas pequeños y portátiles de pruebas de medidas mixtas. Se puede combinar el cDAQ-9174 con hasta cuatro módulos de E/S de la Serie C para lograr un sistema de medidas personalizado de entrada analógica, salida analógica, E/S digital y contadores/temporizadores.
B. NI 9205
El NI 9205 es un módulo de la serie C, para usarse con chasis NI CompactDAQ y CompactPJO. Cuenta, con 32 entradas de una sola terminal o 16 entradas analógicas diferenciales, una resolución de 16 bits y máxima velocidad de muestreo de 2550 kS/s. Cada canal tiene rangos de entrada programables de ±200 mV, ±1, ±5 y ±10 V. Para protegerse contra señales transitorias, el NI 9205 incluye hasta 60 V de protección contra sobrevoltajes entre canales de entrada y común (COM). Además, el NI 9205 incluye doble barrera de aislamiento de canal a tierra para seguridad, inmunidad a ruido y alto rango de voltaje en modo común. Está diseñado para protección de sobrevoltaje transitorio de 1,000 Vrms.
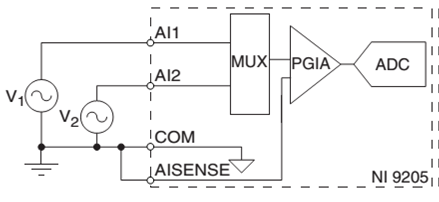
Se utilizó a configuración de medida NRSE (no referenciada) del NI-9205 para poder tomar mediciones en todos los treinta y dos canales y así la reducción de ruido es más eficaz que con la configuración de conexión RSE.
Software de Análisis
El software de análisis para la adquisición y análisis de señales SEMG se desarrolló en la plataforma de instrumento virtual LabVIEW® (ver. 2013 SP1) y el software Matlab (ver. R2014a) que se ejecuta en un ordenador portátil con Windows® 10 x64 (build 10240), un AMD A10-5750M 2,5 GHz con 4 núckos de procesador, memoria RAM y 16 GB.
El programa para adquisición y análisis de señales SEMG consta de varias etapas las cuales se describirán a continuación.
A. Filtrado Digital
Filtra una señal de tiempo usando una respuesta de impulso infinita (IIP) o respuesta de impulso finito (FIR). Se utiliza el filtro para eliminar o atenuar las frecuencias no deseadas de una señal utilizando diversos tipos de filtros estándar y topologías.

Este VI Express filtra la señal de entrada de forma continua. El VI Express restablece la señal a su valor original de la primera vez que el VI Express se ejecuta, si el software detecta una discontinuidad en la señal de entrada, o si la entrada de reset recibe un valor TRUE. Los filtros digitales que se integraron en el software fueron:
B. Transformada rápida de Fourier (FFT)
La Transformada rápida de Fourier se define como:
 4
4
Para n = 0,1, 2,..., N - 1
Donde x es la secuencia de entrada, N es el número de elementos de x, e Y es el resultado de transformar.
C. Densidad de Potencia Espectral (PSD)
La PSD es una versión reducida del espectro de potencia, donde la potencia presente dentro de cada valor espectral. Se calcula:
 5
5
Donde r mm(k) es la función de auto correlación y e -ikw es el k-iésimo armónico senoidal de la señal. Normalmente se utiliza esta medida para examinar el nivel de ruido de una señal o la potencia en un determinado rango de frecuencias. Normalizar el espectro de potencia por la anchura hace esta medición independiente de la duración de la señal, o el número de muestras. El software desarrollado entrega la PSD de la FFT de la señal SEMG y muestra los resultados en Hz por RMS al cuadrado en tiempo real.
D. Frecuencia de Potencia Media (MNF) MNF es una frecuencia media que se calcula como la suma de producto del espectro de potencia SEMG y la frecuencia dividida por la suma total de la potencia del espectro 21. La MNF también encuentra en la literatura como" la media de frecuencia espectral. La definición de la MNF está dada, por:
 6
6
Donde f j es el valor de frecuencia de espectro de potencia EMG en el intervalo de frecuencia j , P j es el espectro de potencia EMG en el intervalo de frecuencia j , y M es la longitud del intervalo de frecuencia. En el análisis de la señal de EMG, M se define generalmente como la siguiente potencia del doble df la longitud de la señal EMG en el dominio del tiempo. El software desarrollado calcula en tiempo real la MNF de una señal de electromiografía. Primero calcula el espectrograma de la trans3ormada de Fourier de tiempo corto (STFT) de la señal SEMG y luego calcula la MNF utilizando el espectrograma STFT.
E. Frecuencia de Potencia Mediana (MDF)
MDF es una frecuencia a la que el espectro de potencia EMG se divide en dos regiones con igual amplitud 21. MDF también se define como una media de la potencia total (dividiendo el total de potencia en dos partes iguales). La definición de MDF está dada por:
 7
7
El software que se desarrolló calcula en tiempo real la MDF de una señal Fe electromiografía. Primero calcula el espectrograma de la transformada de Fourir de tiempo corto (STFT) de la señal EMG y luego calcula la MDF utilizando el espectrograma STFT.
F. Frecuencia Media Instantánea (IMNF)
La frecuencia instantánea es definida como la primera fase de la derivada de la señal. La necesidad de promediación viene de que la señal EMG es una señal aleatoria.
 8
8
Donde P(t,ɯ) es la PSD de la señal.
El software desarrollado calcula en tiempo real la frecuencia media instantánea (IMNF) de una señal a partir de su espectrograma. El IMNF revela cómo la frecuencia centfral de la señal cambia con el tiempo.
Resultados y discusión
Se construyó el sistema de adquisición y análisis de señales SEMG, el cual cuenta con las características señaladas en la siguiente tabla.
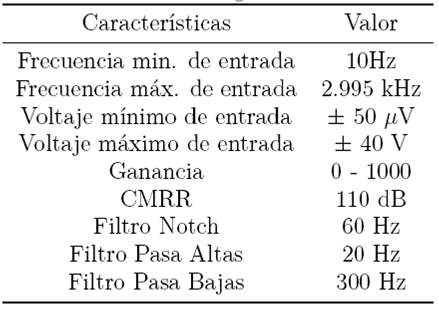
Para comprobar el funcionamiento del sistema se procedió a adquirir la señal SEMG del músculo bíceps brachii al realizar movimientos cíclicos. Se utilizaron electrodos superficiales de AgCl de gel sólido conductivo en configuración bipolar, para adquirir las señales SEMG, localizados donde como muestra la figura 8.

En la figura 9 se muestran las gráficas obtenidas en el panel del instrumento virtual. La figura 9(a) muestra la señal electromiográfica pura amplificada. La figura 9(b) muestra la señal electromiográfica filtrada en la banda de 10 Hz a 300 Hz. La figura 9(c) muestra el espectro de potencia de la señal electromiográfica con respecto a frecuencia. La figura 9(d) muestra la magnitud de los componentes en frecuencia de la señal EMG. Por último la figura 9(e) y 9(f) muestran los espectros de frecuencia de potencia media y de potencia mediana. Estos espectros nos p roporcionan información relacionada con la fatiga muscular, ya que el espectro de potencia se va recorriendo hacia frecuencias menores cuando" el músculo se va fatigando lo que permite monitorear la fatiga en tiempo real durante un ejercicio. Por lo que se decidió realizar dos ejercicios (contracción estática y contracción dinámica) para comprobar que el sistema era capaz de monitorear la fatiga en tiempo real utilizando los parámetros en frecuencia que calcula el software desarrollado.
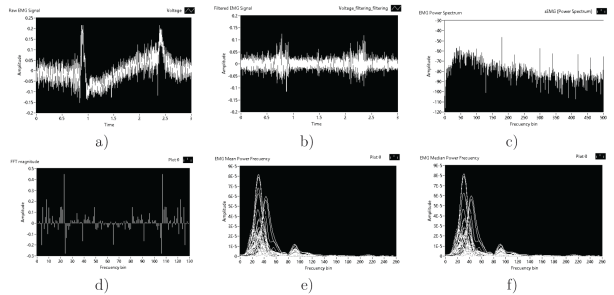
Figura 9: Sistema de procesamiento de señales digitales. Señal SEMG en bruto (a), Señal SEMG después del filtrado digital (b), Espectro de potencia de la señal (c), Magnitud de la FFT (d), Frecuencia de potencia mediana (e), Frecuencia de potencia media.
A. Ejercicio de Fatiga durante una Contracción Estática
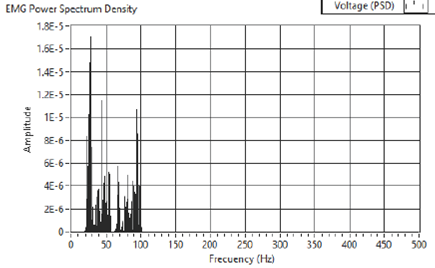
Para la detección de la fatiga la fatiga muscular durante una contracción estática se determinó adquirir las señales SEMG del músculo bíceps (musculus bíceps brachii), con los electrodos en configuración bipolar 22. Se planeó un ejercicio para fatigar el músculo durante una contracción estática, para esto, en la mano se cargó un peso de 3kg y se sostuvo el brazo flexionando el codo a 90° por aproximadamente 240 s (4 minutos). Cada 60 s se realizó una rápida flexión total del brazo y luego se regresaba a su posición inicial de flexión a 90°. En la figura 10 se puede observar la señal SEMG obtenida durante todo el ejercicio de fatiga estática. El PSD (figura 11) nos muestra cómo está distribuida la energía de la señal sobre las distintas frecuencias de las que está formada. A partir de la PSD se calcula entonces la Frecuencia Media Instantánea (IMNF).

Los valores obtenidos en la figura 12 se promediaron cada 0.5 segundos.
Al agregarle una recta de tendencia lineal podemos observar como la IMNF (figura 12) va disminuyendo con el tiempo, lo que es indicativo de que el músculo se va fatigando con el tiempo 14. Las fibras musculares al fatigarse sufren de varios cambios en la estructura química de sus membranas celulares. Haciendo que las señales SEMG obtenidas sufran un aumento en su amplitud y después un decremento sostenido 23. En la Figura 13 podemos observar como el voltaje RMS sufre un aumento en sus valores, lo cual es indicativo de fatiga muscular 13.

B. Fatiga durante Contracciones Dinámicas
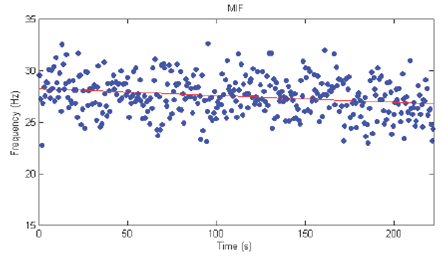
Para la detección de la fatiga la fatiga muscular durante contracciones dinámicas cíclicas se determinó adquirir las señales SEMG del músculo bíceps (musculus bíceps brachii), del brazo derecho con los electrodos en configuración bipolar 22. En la mano se cargó un peso de 3kg para realizar varias flexiones de entre 130° y 50° aproximadamente, tomando en cuenta los 180° como el brazo totalmente estirado, durante aproximadamente 210 s (3.5 minutos). Las flexiones se realizaron a una velocidad aproximada de una flexión cada 2 segundos. Se tomó en cuenta como fatiga extrema a la incapacidad de alcanzar la flexión a los 50°.
En la figura 14 podemos observar la señal SEMG obtenida durante todo el ejercicio de fatiga dinámica. Al igual que con la contracción estática se calcula la Frecuencia Media Instantánea (IMNF). Los valores obtenidos se promediaron cada 0.5 segundos. Al agregarle una recta de tendencia lineal (figura 15) podemos observar como la IMNF va disminuyendo con el tiempo, lo que es indicativo de que el músculo se va fatigando con el tiempo.


En la Figura 16 podemos observar como el voltaje RMS sufre un aumento en sus valores, que también se observa en el aumento de amplitud de la señal SEMG en la figura 14.

Este aumento es indicativo de fatiga muscular.
Conclusiones
Se presenta el diseño de un sistema para adquisición y análisis SEMG que procesa la señal utilizando parámetros en frecuencia como transformada de Fourier, densidad espectral de potencia y frecuencia media instantánea. La ventaja de utilizar el parámetro de frecuencia media instantánea es que se pude monitorear en tiempo real la fatiga en un musculo. Esto es importante en la aplicación de control de movimiento robótico por señales electromiográficas ya que la fatiga es una característica de la señal electromiográfica que puede llegar a afectar un sistema, basado en SEMG si es utilizado por mucho tiempo. El sistema está pensado para, ser usado en el control de brazos robóticos para la ejecución de tareas sin contacto directo por parte del operador o en sistemas de simulación y animación en 3D.

