










Servicios Personalizados
Revista
Articulo
 Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista mexicana de ingeniería biomédica
versión On-line ISSN 2395-9126versión impresa ISSN 0188-9532
Rev. mex. ing. bioméd vol.36 no.1 México abr. 2015
Nota técnica
Prototipo de una Prótesis Mioeléctrica para la Emulación de una Articulación de Codo
Prototype of a Myoelectric Prosthesis for the Emulation of an Elbow Joint
D. Contreras, A. Ramírez-García, F. Gallegos, I. Bazán
Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) Zacatenco, Instituto Politécnico Nacional, México.
Correspondencia:
Diana Contreras
Av. Luis Enrique Erro S/N, Unidad Profesional Adolfo López Mateos, Zacatenco,
Delegación Gustavo A. Madero, C.P. 07738, México, D.F.,
Escuela Superior de Ingeniería Mecánica y Eléctrica en Maestría en Ciencias en Ingeniería Electrónica.
Correo electrónico: dianalecontreras@gmail.com
Fecha de recepción: 18 de septiembre de 2014
Fecha de aceptación: 6 de enero de 2015
RESUMEN
En este trabajo se describe el desarrollo de un prototipo de prótesis mioeléctrica para la articulación de codo. Se dividió en tres partes, en la primera se describe el acondicionamiento de la señal mioeléctrica (SME) donde se propuso un circuito que está formado por una etapa de pre-amplificación, seguida de una etapa de filtrado, otra etapa de amplificación y por último la etapa de rectificación. Este circuito cumple con las especificaciones para la detección de la SME según el estado del arte. En la segunda parte se describe el procesamiento de la SME basado en el método TKEO, este se implementó en MatLAB (MathWorks- Natick, Massachusetts, USA) con la finalidad de detectar la actividad muscular, y resultó robusto y eficiente. La tercera parte se enfoca al diseño y construcción del prototipo, para el sistema de transmisión se usó un par de engranes y para el sistema de actuación los actuadores eléctricos; ambos se definieron según los criterios que se describen en este trabajo. Finalmente, se integraron las tres partes para la emulación de los movimientos flexión y extension del prototipo, haciendo uso del microprocesador (Arduino UNO) y del módulo de control de motores (Controlador de servo 1350 de Pololu).
Palabras clave: articulación de codo, protésis mioeléctrica, prototipo, señal mioeléctrica (SME), Teager-Kaiser Energy Operator (TKEO).
ABSTRACT
In this paper the development of a prototype for a myoelectric prosthesis elbow joint is described. It is divided into three parts; the first is the conditioning of the myoelectric signal (SME) which proposed a circuit that is formed by a stage of pre-amplification, followed by a stage of filtering, another stage of amplification and finally a stage of rectification. This circuit complies with the specifications for the detection of the SME according to the state of the art. The second part is the processing of the SME based on the method TKEO, this was implemented in MatLAB (MathWorks - Natick, Massachusetts, USA) in order to detect if the muscle is active or not, and proved to be robust and efficient. The third part focuses on the design and realization of the prototype, in the system of transmission was used a couple of gears and for the system of actuation were electrical actuators; both were defined considering several criteria referred to in this work. Finally, the three parts were joined for the emulation of flexion and extension movements of the prototype, using the microprocessor (Arduino UNO) and control module (controller servo Pololu 1350).
Keywords: elbow joint, myoelectric prosthesis, prototype, myoelectric signal (SME), Teager-Kaiser Energy Operator (TKEO).
INTRODUCCIÓN
En México, según el Censo General de Población y Vivienda del 2010, el 2.9% de la población total representa a personas con discapacidad motriz, quienes requieren ayuda de otras personas o de algún aparato externo conocido como prótesis [1]. Las prótesis que se desarrollan en México tanto en instituciones como en empresas son de alto costo y la mayoría son de tipo mecánicas y estéticas [2, 3, 4, 5, 6, 7]. Hoy en día, con los avances de la tecnología en el campo de las prótesis, estas ya pueden ser manipuladas por señales biológicas como lo son las señales del músculo, debido a esto a este tipo de prótesis se les conoce como prótesis mioeléctricas. En México existen pocas empresas [6,7] que desarrollan prótesis mioeléctricas, a pesar de que su precio es menor comparado con las prótesis comerciales desarrolladas en otros países [27-30], aún así la población mexicana no tiene el suficiente recurso económico para adquirir un dispositivo prótesico de estas caracterísicsas ó bien no lo usan debido a la complejidad de su funcionamiento. Por lo tanto, la propuesta de este trabajo es desarrollar un prototipo protésico que emule la función de flexión-extesión de la articulación de codo, con material de bajo costo, de fácil manipulación con el uso de señal mioeléctrica y que tenga una respuesta inmediata cuando se le da la orden.
Las prótesis mioeléctricas de codo son para personas con amputación por arriba del codo y el muñón debe tener una longitud de 6-8 cm. Algunas prótesis de codo funcionan por un sistema cinemático, es decir, a partir de la tracción del correaje; esto es que mediante movimientos corporales y el uso del correaje se acciona el bloqueo o desbloqueo de la articulación de codo. Otras prótesis tienen codos mecánicos que suelen ser endoesqueléticos, estos es a través de fricción continua que pueden ser libres o bloquearse en distintas posiciones [8].
En la Tabla 1 se presentan las principales características de una prótesis mioeléctrica de codo según la literatura [27-30]. Estas fueron tomadas como referencia para el desarrollo de la prótesis aquí propuesta. La señal múscular o mioeléctrica (SME) utilizada para la activación de las prótesis tiene las siguientes características amplitud de entre 50 μV y 5 mV, y un rango de frecuencia de 20 Hz a 500 Hz [9]. Por lo que para la elaboración del prototipo de prótesis primero se registra la SME mediante electrodos de plata-cloruro de plata (Ag-AgCl) por su disponibilidad, por no ser invasivo y por su fácil uso [10]; estos se colocan sobre la superficie de la piel en el músculo de interés. En la literatura se recomienda que los electrodos tengan un diámetro de 10 mm, sean de forma circular y para su colocación se considere una separación de 2 cm a 3 cm [11, 12, 13]. Una vez registrada la SME, se acondiciona para posteriormente ser procesada [14, 15, 16]. El acondicionamiento consiste en etapa de filtrado para delimitar el ancho de banda de la señal y atenuar el ruido de 60 Hz presente en el entorno, así como el que se debe a el movimiento de cables de los electrodos e interferencias (como señales procedente de otros músculos y la señal ECG) [9]. También consta de etapas para amplificar la SME dado que tiene una amplitud pequeña ya que se encuentra en el rango de los microVolts a miliVolts. Y finalmente una etapa de rectificación para el procesamiento digital de la SME. El objetivo del procesamiento es identificar cuándo se presenta actividad muscular (contracción muscular) y cuando no (relajación muscular) para activar el prototipo, para esto se debe determinar un umbral.
Existen varios métodos [17, 18, 19] para definir un umbral como el método por inspección visual donde a simple vista una persona puede indicar la actividad que se presenta en la SME, pero se requiere de una persona experta al análisis de SME además de no ser un método objetivo. Otro método es promediar todas las señales sin actividad muscular pero se presenta en la mayoría de los casos falsas alarmas, un método más es un umbral propuesto (30 μV) por los autores al realizar varias pruebas, solo que no es fiable ya que cada persona tiene una SME distinta así que se recomienda obtener el umbral por cada sujeto.
En este trabajo se usó el método TKEO (Teager-Kaiser Energy Operator) basado en [20, 21], este método permite estimar la energía y es sensible a cambios en amplitud y frecuencia de la señal bajo análisis. Por lo tanto, cuando en una SME se pasa de un estado de inactividad a un estado de contracción muscular se tiene como salida del método TKEO una clara diferencia de la señal del músculo en actividad y la señal de ruido. Este método se caracteriza por ser un algoritmo simple, robusto y eficiente [22, 23, 24], además permite detectar cuando el músculo está en actividad después de obtener el umbral de la señal de ruido, es decir, cuando no hay contracción muscular.
Con este método después de ser implementada en un microprocesador permitirá indicarle al prototipo cuando es un movimiento de extensión o de flexión.
Para el prototipo de prótesis, el sistema del mecanismo tiene dos partes, el sistema de actuación que es el tipo de fuente que el mecanismo requiere para generar movimientos en la prótesis, y el sistema de transmisión que se encarga de producir movimientos mediante elementos mecánicos. Después de la elección del tipo de sistema de actuación y transmisión, se procede a realizar los cálculos para la elaboración del mecanismo del prototipo. En este trabajo se propone el desarrollo de un prototipo de prótesis mioeléctrica que incluye el acondicionamiento de la SME, procesamiento de la SME y construcción del mecanismo del prototipo. Finalmente, cada parte se caracteriza para la validación de su funcionamiento de acuerdo a la literatura.
METODOLOGÍA
Para el desarrollo del prototipo se consideraron tres etapas como se muestra en la Figura 1, en la primera parte se acondiciona la SME que es registrada por los electrodos de plata-cloruro de plata del músculo bíceps. Para su acondicionamiento, se implementó un circuito electrónico considerando las recomendaciones de SENIAM (Surface ElectroMyoGraphy for the Non-Invasive Assessment of Muscles) e ISEK (International Society of Electrophysiology and Kinesiology) tales como: aplicar una etapa de pre-amplificación sugiriendo el uso de un amplificador de instrumentación ya que nos garantiza una alta impedancia de entrada, una alta ganancia (G) y un alto CMRR (razón de rechazo a modo común), verificando que este CMRR debe ser mayor a 90 dB a una frecuencia de 60 Hz. Otra aplicación recomendada es la etapa de filtrado diseñando un filtro pasa altas con fc = 10 Hz a 20 Hz y un filtro pasa bajas con fc = 500 Hz, posteriormente se recomienta la etapa de rectificación de precisión, y finalmente se menciona las características de la SME descritas en la introducción [9, 25].
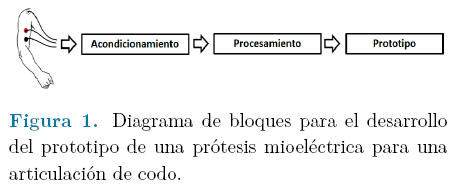
En la segunda parte de la Figura 1, se procesa la SME donde se usó el método TKEO y la tercera parte es el prototipo mecánico que posteriormente se activará si se realiza una contracción muscular.
Acondicionamiento de la SME
Para el registro de la SME, se colocan los electrodos de plata-cloruro de plata sobre el músculo bíceps braquial. Para su colocación se siguieron las recomendaciones de [9] que es: primero ubicar el hueso acromion y la fosa cubital (fosa del codo), después trazar una línea media para conectar ambos huesos, y a un tercio de la línea media de la fosa cubital es donde se deben colocar los dos electrodos. Entre estos electrodos deben tener una distancia de 2 cm, en el caso del electrodo de referencia su colocación es sobre el hueso acromion o alrededor de la muñeca.
La implementación del circuito de acondicionamiento se dividió en cuatro etapas:
Etapa de pre-amplificación: se eleva la amplitud de la señal debido a su característica de baja amplitud (50 μV a 5 mV). El amplificador utilizado es un amplificador de instrumentación INA114 por sus características: la corriente de polarización de entrada es baja (≤ 2 nA), tiene un alto CMRR de 115 dB, alta ganancia, alta impedancia de entrada y su costo es bajo. Se configuró para una G de 10 al usar (1), y se obtuvo el valor de la resistencia (RG); debido al valor comercial de RG la ganancia fue de 10.78.

Etapa de filtrado: se acondiciona la señal para trabajar en la banda de frecuencia de 20 Hz a 500 Hz y elimina el ruido que afecta a la señal. En esta etapa de filtrado consiste de un filtro Notch y un filtro pasa banda. El filtro Notch que se implementó fue la configuración del circuito integrado UAF42 de [26] por su simplicidad en el diseño además de garantizar la eliminación del ruido de 60 Hz. El filtro pasa banda se diseñó con apoyó del Software FilterProTM de Texas Instruments. El filtro pasa banda se diseñó en cascada, donde primero se presenta un filtro pasa altas con fc = 20 Hz, seguido de un filtro pasa bajas con fc = 500 Hz, ambos con ganancia de 10. Este filtro pasa banda se implementó con un amplificador operacional TL084CN por su alto CMRR de 100 dB y por su disponibilidad en el mercado, es de tipo Butterworth de cuarto orden, ya que su respuesta es plana al acercarse a la frecuencia de corte (fc) con topología Sallen-Key porque requiere de menos elementos comparado con otras topologías por lo que se obtiene un circuito más simple.
Etapa de amplificación: se amplifica una vez más la señal usando el mismo amplificador operacional TL084CN con configuración inversora y ganancia de 5. Para el cálculo de los componentes se aplicó (2) resultando una ganancia total del circuito de 1078 a 5390.
Etapa de rectificación: se rectifica la señal a media onda como acondicionamiento para el microprocesador. El circuito rectificador se muestra en la Figura 2 y se implementó con el amplificador operacional TL084CN.
Después de implementar el circuito, se prosigió a calcular la relación señal/ruido (SNR) de la señal basándose en (3), este nos indica que tan grande es la señal de interés con respecto al ruido, del cual para su cálculo se requiere del RMS (amplitud de la raíz media cuadrática) que se define en (4).

donde: RMSS es el valor RMS de la señal de interés, que se presenta cuando el músculo está contraído. Sin embargo, el RMSR es el valor RMS de la señal de ruido, que se presenta cuando el músculo está relajado.
donde: x es la señal de entrada (SME), ni son los valores de la señal y N es el número total de valores que se obtuvieron de la señal.
Entonces, para obtener el SNR de las señales obtenidas con el circuito. Se obtuvieron varias señales con contracción muscular para obtener el promedio de RMSS, de la misma forma se obtuvo el promedio de RMSR de varias señales con relajación muscular.
Procesamiento de la SME
En MatLAB, se implementó el método TKEO definido en (5), donde x (n) es la SME. Primero se determina el nivel de umbral (Th) usando (6), esto se hace promediando las señales de ruido (relajación del músculo) después de aplicarles el método de TKEO; donde se define la media (uo) y la desviación estándar (oo) del conjunto de señales de ruido utilizadas, mientras que j es una variable que se determina empíricamente y está en el rango de 3-7 en base a [21].
Después de registrar la SME con el circuito implementado, la SME es procesada con el método TKEO y cuando esta señal pase el nivel de umbral (Th), el prototipo se activará de lo contrario no habrá activación, para que el prototipo realice los movimientos de extensión y flexión, deberá ir acoplado a un actuador y a un sistema de mecanismo.
Diseño de prototipo
Para el diseño de la prótesis aquí propuesta se consideraron las características de prótesis mioeléctricas de codo comerciales que se muestran en la Tabla 1, [27, 28, 29, 30]. La importancia de cumplir estas características radica en que el dispositivo protésico resultante sea funcional y satisfactorio para los posibles usuarios, ya que factores como el peso, tiempo de respuesta y facilidad de operación son tomados en cuenta por ellos para tomar la decisión de usar o no el dispositivo protésico.
Considerando las características, primero se va a diseñar el mecanismo para esto es esencial investigar el sistema de actuación y el sistema de transmisión. A continuación se describe cada tipo de sistema:
Sistema de actuación: este sistema es de suma importancia porque se encarga de producir la potencia mecánica para que el mecanismo pueda activarse. Los dispositivos que llevan a cabo esta tarea son los actuadores, de los cuales hay tres tipos: los neumáticos que su fuente de energía es el aire a presión y su aplicación en el campo de las prótesis es cuando solo se requiere de dos estados como abrir-cerrar de una pinza (mano), en los hidráulicos su fuente de energía es el fluido y se aplica en robots de mayor tamaño por lo que se requiere de mayor velocidad y mayor resistencia mecánica; y en los eléctricos su fuente de energía es la corriente eléctrica y se utilizan en robots que requieren de exactitud y repetitividad. Los actuadores eléctricos son los de mayor aplicación en el campo de las prótesis ya que tienen gran eficiencia, disponibilidad y tamaños compactos. Aquí hay varios tipos de actuadores eléctricos, los más comunes son los motores a paso, motores de CD, servomotores, entre otros.
Los motores a paso tienen un gran par de torsión a velocidades bajas, gran precisión al calcular la posición, es de bajo costo y requiere de poco mantenimiento. Los motores a CD tienen una respuesta rápida, un buen rendimiento y es de bajo costo. Los servomotores son eficientes, giran aproximadamente 0° a 180°, son fáciles para controlar y tienen un torque elevado. En este proyecto, se optó por usar los servomotores debido a que es el actuador eléctrico que en dimensiones reducidas presenta mayor torque comparado con los otros; para este trabajo se requiere de un gran torque para poder cargar un determinado peso; y además se está limitado por el espacio donde se deben incorporar los elementos componentes de la prótesis
Sistema de transmisión: en el diseño de una prótesis se trata de emular la funcionalidad de alguna parte del cuerpo. En lo que respecta a los movimientos de una extremidad superior, cualquiera que sea el movimiento, este debe ser suave para que no se vea un movimiento pausado al usar un actuador eléctrico, pero como estos actuadores trabajan a demasiada velocidad; es por eso que para el sistema de transmisión se requiere de sistemas de reducción de velocidad para efectuar el movimiento suave en la prótesis. Los sistemas de transmisión con reducción de velocidad hacen uso de engranes, los cuales tienen distintas configuraciones como un par de engranes, tren de engranes, engranes planetarios, entre otros; y pueden realizar varios movimientos tales como lineal, rotatorio, curvos, etc. El sistema de transmisión con reducción de velocidad que se utilizó fue el par de engranes por su diseño sencillo y bajo costo de producción, además de disminuir la velocidad y aumentar la potencia. Este par de engranes va a transmitir un movimiento rotatorio para realizar los movimientos de flexión y extensión del prototipo al estar acoplado a un servomotor. Hay varias formas de colocar el par de engranes ya sea mediante las bandas que son flexibles, no son ruidosas y no requieren de lubricación, las correas que son flexibles y no se deslizan, ó simplemente pueden estar sujetos mediante algún perno, barra o varilla que se diseña en el mecanismo como se realizó en este prototipo.
Para el cálculo del par de engranes, se requiere conocer la potencia transmitida (P) y la velocidad angular (ω) del sevomotor, el servomotor a usar es el HD-1501MG, sus propiedades son: voltaje de 4.8V - 6.0V, con velocidad de 0.16s/60° - 0.14s/60° (sin carga), torque de 15.5Kg·cm - 17Kg·cm con ángulo de 180° ± 10° además de que su tamaño es pequeño y con un peso ligero. A continuación se describe el procedimiento para obtener las medidas del par de engranes:
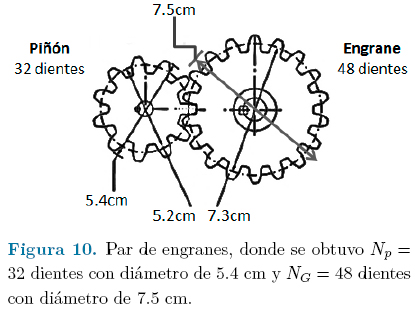
Paso 1: se especifica el número de dientes de la rueda más pequeña (Np) conocido como piñón. En [30] se sugiere usar dientes menores de 35 dientes para tener un gran torque, en nuestro caso se eligió Np = 32 dientes.
Paso 2: se calculó la relación de velocidades (V R) que se define en varias formas como se ve en (7), V R nos indica la relación que existe entre las velocidades de rotación de dos engranes conectados entre sí como en la Figura 10. Esa diferencia de velocidad de rotación se debe a la diferencia de diámetro de cada engrane. Es decir, para este par de engranes, se conoce la velocidad del piñón (np = 71 rpm) que es la velocidad del servomotor ya que se encuentran acoplados, y la velocidad del engrane que es el deseado por el diseñador, en este caso se decidió nG = 47 rpm; por lo tanto V R = 1.51. Esto indica que el piñón dará una vuelta y media para recorrer toda la rueda grande, por lo cual su np es mayor a nG esto nos garantiza que al reducir la velocidad de la rueda grande nos aumenta el par de fuerza, de lo contrario, si nG fuera mayor a np se tendría que acoplar el servomotor a la rueda grande por lo que V R sería menor a 1.51 esto indica que con solo la mitad de la rueda grande recorre todo el piñón, pero está configuración ya no es un sistema de reducción de velocidad sino es un sistema de amplificador de fuerza que normalmente se usa para el diseño de las prótesis de mano empleando una pinza o un gancho.
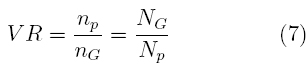
Paso 3: se calculó el número de dientes de la rueda grande (NG) llamada engrane, basándose en (7) requiriendo de V R y Np. Posteriormente, para el tamaño de dientes y la distancia entre dientes, se hace uso de las medidas estándares en [32] sabiendo Np y NG.
Para la medida del largo del antebrazo se tomaron en cuenta las medidas antropométricas de mexicanos entre 18 y 65 años de [33] como se muestra en la Figura 3.
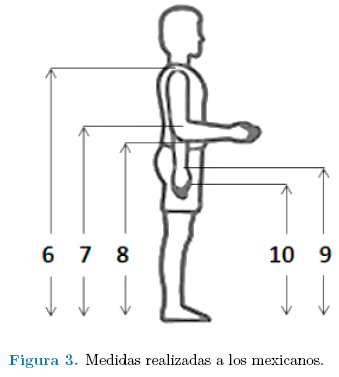
Con respecto a la Figura 3, en la Tabla 2 se muestran las medidas calculadas de los mexicanos.
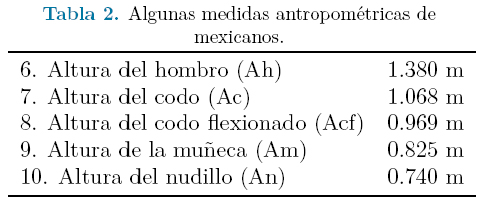
Para caracterizar al prototipo, se calculó el torque de salida del par de engranes (ver Figura 4) de la siguiente forma:
Paso 1: basándose en la definición del torque (8) donde F es la fuerza y r es la distancia, se calculó la fuerza del piñón (Fp) teniendo el torque del piñón (Tp = 15.5 Kg·cm) que es el torque del servomotor, y el radio del piñón (rp = 2.6 cm).

Paso 2: se calculó el torque del engrane (TG) que es el torque de salida, se usó (8) donde Fp es la misma fuerza del engrane entonces FG = 58.477 N y el radio del engrane es de 3.6 cm.
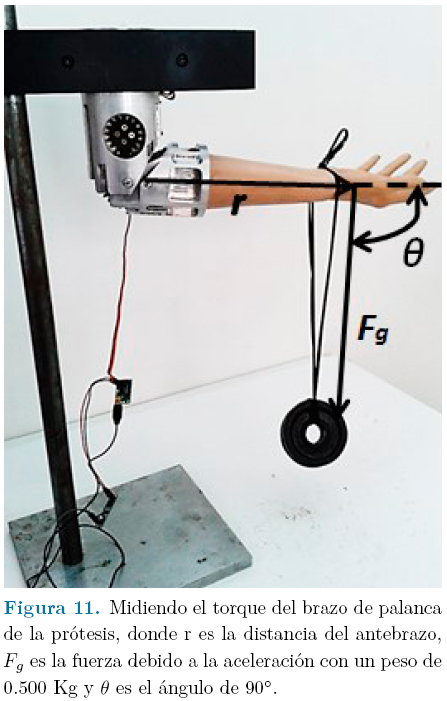
También, se calculó el torque del brazo de palanca (TB) del prototipo con (9), donde se consideró θ = 90° porque es donde se presenta la mayor fuerza, r es la medida del antebrazo y Fg es la fuerza debido a la aceleración del cual se mide multiplicando la masa (m) por la gravedad (g = 9.81 m/s2). Esto nos permite conocer la fuerza que se requiere para levantar un determinado peso.

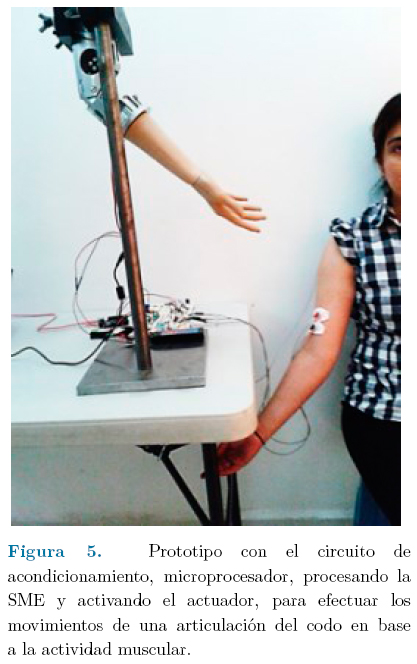
El prototipo desarrollado se muestra en la Figura 5. Para su funcionamiento : primero se colocaron los electrodos sobre el músculo bíceps, segundo se conectaron los cables de los electrodos al circuito de acondicionamiento, tercero la salida del circuito se conectó a la entrada del microprocesador Arduino Uno sus características son: funciona a un voltaje de 5 V, tiene 6 entradas analógicas, 14 digitales de las cuales 6 con PWM, su velocidad de reloj es de 16 MHz y es de 10 bits; en él se almacena los datos de la SME, cuarto los datos pasan a la computadora para ser procesados en MatLAB con el método TKEO e indicando hacia donde gira el servomotor, si este servo va de 0° a 180° el movimiento del prototipo es una flexión de lo contrario sería una extensión donde el servo va de 180° a 0°. Para determinar la posición, el servomotor funciona através de PWM (Pulse-Width Modulation) para esto se hace uso de un controlador de servo 1350 de Pololu con las siguientes especificaciones: 6 canales para conectar a servomotores, opera con un voltaje de 5 V y un rango de baudios de 300bps - 200000 bps, además tiene una comunicación serial por lo que se conecta con el Arduino Uno y con el servomotor. La programación de MatLAB consiste en programar la interfaz del Arduino Uno, después abre el puerto serial del Arduino para leer los datos almacenados, posteriormente estos datos pasan por el método TKEO y recordando que previamente se determina el número de umbral del sujeto de prueba, entonces en el programa de MatLAB solo se asigna el valor del número de umbral; luego mediante ciclos se hace la rutina para enviar comandos al controlador de servo para indicarle hacia donde moverse. Si al procesar los datos de la SME (ya aplicados con el método TKEO) sobre pasa del número de umbral, esto indica que el músculo bíceps está realizando una contracción por lo que el prototipo realizará una flexión, en caso de que los datos no pasan del número de umbral, significa que el músculo bíceps está en relajamiento entonces el prototipo hará una extensión.
RESULTADOS
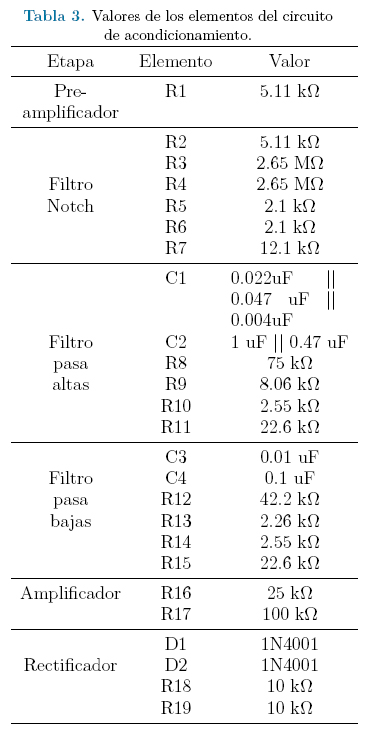
La configuración del circuito total se muestra en la Figura 2, así mismo los valores comerciales de los elementos del circuito se muestran en la Tabla 3, se recomienda que las resistencias sean de precisión y los capacitores de cerámica y/o poliéster.
La respuesta en frecuencia del circuito elaborado se muestra en la Figura 6 donde se ve el comportamiento del filtro Notch rechazando la frecuencia alrededor de 60 Hz y el filtro pasa banda (filtro pasa altas-filtro pasa bajas) con un ancho de frecuencia aproximado a lo calculado (20Hz - 500Hz).
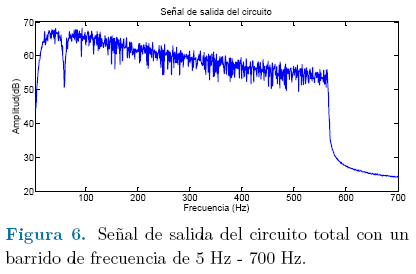
Finalmente, se estimó un SNR de 23.86 dB que es aceptable para que la SME sea procesada, el ancho de banda fue de 18Hz - 550Hz y por cada etapa del circuito su ganancia corresponde a la calculada.
Para la digitalización de la señal de salida se utilizó un convertidor A/D my DAQ de National Instruments, este convertidor es de 16 bits, con un voltaje de referencia de 1 V se pueden detectar hasta 15 μV lo cual es suficiente para cualquier nivel de la SME. Con el programa de LabVIEW de National Instruments se obtuvieron los datos de la señal de salida con un muestreo de 2000 muestras por segundo, y posteriormente se procesaron en el Software MatLAB de MathWorks.
Para obtener la SME se colocaron los electrodos en el músculo de bíceps braquial y se realiza una contracción muscular aproximadamente con una duración de 2s, en seguida una relajación con la misma duración; esto hasta lograr un periodo de 10 s.
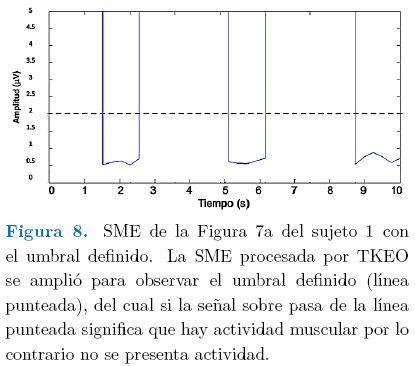
El registro que se obtiene de la SME como se observa en la Figura 7, es la sumatoria de los potenciales de acción de cada unidad motora (UM). Una UM es una neurona del sistema motor del humano que se encuentra inervado a un grupo de fibras musculares para producir el movimiento cuando recibe la información por medio de un impulso eléctrico como se menciona en [11, 34]. Cuando tenemos los picos de los potenciales de acción de todas las UM, éstos van acompañados por instantáneos incrementos de amplitud y frecuencia de la señal. Y sabiendo que el TKEO es sensible a estos cambios, además de que la frecuencia de la señal en actividad es mucho mayor que la frecuencia de ruido entonces la salida del método TKEO muestra claramente la diferencia de la señal de ruido con respecto a la señal con actividad. En la Figura 8 se observa la SME con TKEO del sujeto de la Figura 7a pero se amplió la imagen para identificar la línea del umbral con respecto a la señal. Donde el valor del umbral fue de Th = 2 μV usando j = 3. Se puede apreciar una clara diferencia, de que la señal en reposo no sobrepasa el umbral. Por lo tanto, será posible activar los movimientos del prototipo implementando el método en un microprocesador. Cabe mencionar que para cada usuario su umbral será distinto debido a que cada persona posee una diferente SME por su anatomía y fisiología; esto implica que para cada sujeto se debe determinar su nivel de umbral antes de hacer uso del prototipo.
Con respecto al prototipo, éste debe ser ligero y resistente, por lo cual se proponen los siguientes materiales: el polipropileno es un tipo de plástico muy difundido y generalmente se utiliza para los sockets de las prótesis, el aluminio es un metal no ferroso y generalmente se utiliza para soportes o estructuras de las prótesis; y el titanio es un material muy resistente pero costoso, usualmente se usa para prótesis internas. En este proyecto se decidió usar el aluminio con aleación 6061T6 por su bajo peso, alta resistencia mecánica, resistente a la corrosión, fácil de maquilar, estás son características primordiales en la elaboración de una prótesis.
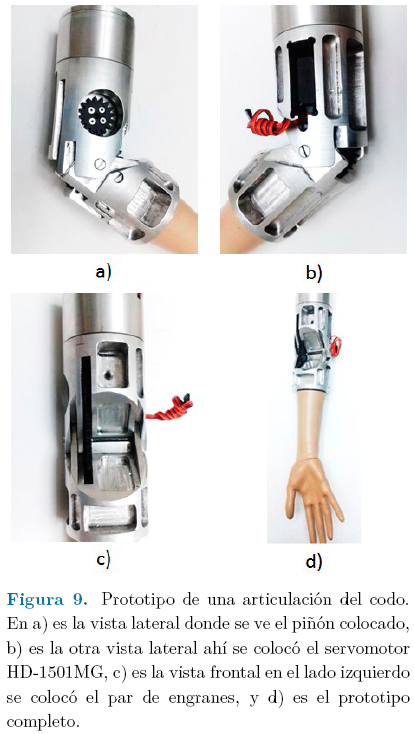
Por otro lado, los engranes se fabricaron con Nylamid SL (color negro) por su propiedad de disulfuro de molibdeno que permite reducir su fricción, tiene gran resistencia térmica, de peso ligero, gran resistencia al desgaste y económico; además este material es muy común para la fabricación de engranes. El prototipo puede verse en la Figura 9.
Las medidas de los engranes calculadas (véase en la parte de Metodología) se muestran en la Figura 10. La medida del antebrazo, considerando la Tabla 2, se hace una diferencia de Ac y Am, por lo tanto la medida es de 24.3 cm.
En la caracterización del prototipo, como resultado, el torque de salida (TG) del par de engrane fue de 23.9 Kg·cm, lo cual es mayor al torque de entrada (Tp = 15.5 Kg·cm), esto concuerda con [32] acerca del aumento del torque. Para el torque del prototipo (TB) se realizaron pruebas con distintas masas (m = 0.5 Kg, 1 Kg, 1.5 Kg, 2 Kg) como se puede ver en la Figura 11.
Empíricamente, el prototipo completo pudo cargar y mover un peso de 0.5 Kg, sin embargo el mecanismo que es el par de engranes su capacidad de carga es de 1.062 Kg considerando otros pesos que se obtuvo a través de una báscula, como es el peso de la estructura que sostiene el mecanismo (pieza de aluminio) de 0.350 Kg y el peso de la pieza del antebrazo de 0.212 Kg. De acuerdo a la Tabla 1, una de las características que debe cumplir este prototipo es la capacidad de cargar, esto indica que el prototipo se encuentra dentro del rango (alrededor de 1 kg).
DISCUSIÓN
El prototipo contiene un circuito de acondicionamiento que es apto para el uso en prótesis mioeléctricas debido a que cumple con las recomendaciones mencionadas anteriormente en [9, 25]. En el circuito se implementó el filtro Notch, aunque algunos autores no recomiendan su aplicación [35,36] por que la mayor parte de la energía de la SME se encuentra alrededor de los 60 Hz, pero en este proyecto se requirió por el uso del ordenador en el procesamiento de la SME por lo que es evidente la presencia del ruido de la señal eléctrica. Aunque algunos autores indican lo contrario, que el 95% de la energía de la SME se considera arriba de 400 Hz [37], además el circuito en PCB se diseñó con las dos opciones, es decir, puede usarse o no con el filtro Notch.
En cuanto al procesamiento de la señal se recomienda emplear un método donde se determina un número de umbral siempre y cuando el sistema sea de un grado de libertad [17] como es en este caso. Existen varios métodos como el inspección visual llevado a cabo por expertos en señales electromigráficas, o bien el de promediado de un conjunto de señales que se mencionan en la Introducción, a diferencia de estos métodos el método TKEO además de ser objetivo y seguro, su algoritmo no tiene un alto costo computacional por lo que es apto para este tipo de aplicaciones en prótesis; ya que lo ideal es que este tipo de sistemas tenga una respuesta rápida. Sin embargo es muy laborioso determinar el número de umbral por cada usuario, ya que antes de usar el prototipo se deben de obtener varios registros de las señales musculares, para ser procesadas y así obtener el número de umbral.
En otras prótesis también es muy común usar el motor CD [30, 38] como en la prótesis de mano [39] pero en nuestro caso se desea un gran torque para soportar la carga es por eso que se usa un servomotor, su desventaja sería el precio ya que entre mayor sea el torque mayor es el costo. Por otro lado, en el sistema de reducción de velocidad es muy usado el tren de engranes que consiste en más de dos ruedas dentadas entre sí, pero como se usó un servomotor del cual contiene un sistema de engranes en su caja por lo que no se requiere de una configuración de engranes muy complejo es por eso que se eligió el par de engranes.
Para el funcionamiento del prototipo, podría evitarse usar el módulo de control de motores pero el algoritmo tiene un alto costo computacional por lo que no sería muy útil en una prótesis, ya que tardaría en responder el prototipo.
CONCLUSIÓN
Hoy en día, no hay una investigación que nos indica exactamente cuál es el peso de una prótesis y el peso que pueda cargar una prótesis; pero mediante las prótesis comerciales nos podemos referenciar, ya que han sido usadas por personas; estas características se usaron para diseñar nuestro prototipo.
Las pruebas que se realizaron para el registro de la SME, se recomienda una posición adecuada al momento de realizar los ejercicios de contracción y relajación del músculo, para evitar lo más posible el ruido que se genera por los movimientos. En cuanto al circuito, se recomienda que el amplificador de instrumentación tenga un CMRR > 90 dB para garantizar que las siguientes etapas no sean afectadas por el voltaje a modo común ya que es un tipo de ruido que se presenta cuando la tensión es la misma en las entradas. Se logró atenuar el ruido de 60 Hz gracias a la implementación del Filtro UAF42. Finalmente, se sugiere el uso del Software para el diseño de los filtros, ya que nos optimiza el tiempo de cálculo de los valores de los elementos, pero antes de utilizarlo se deben conocer las características de la SME para que el filtro funcione adecuadamente.
En el procesamiento de la SME, se seleccionó el método TKEO para indicar si hay presencia o no de actividad muscular además de ser un algoritmo de fácil implementación, demostró ser preciso al distinguir la actividad muscular que se presenta en las señales obtenidas con respecto a un umbral definido.
En el diseño del mecanismo del prototipo de prótesis, para el sistema de actuación, el actuador más usado es el eléctrico y se eligió el servomotor por su capacidad de torque ya que uno de nuestros propósitos es cargar un peso alrededor de 1 Kg de acuerdo a las características de las prótesis comerciales. Mientras en el sistema de transmisión, se hace uso de un sistema de reducción de velocidad del cual se implementó un par de engranes para tener un mayor torque.
Los materiales para la elaboración del prototipo se seleccionaron por su resistencia, su peso ligero y el bajo costo. Estos fueron el Nylamid y el aluminio.
Finalmente se verificó que el torque aumenta con el par de engranes además de que puede soportar 1 Kg.
Como trabajo futuro, es implementar el método TKEO y el procedimiento del funcionamiento del prototipo en el Arduino Uno; así mismo caracterizar el prototipo de acuerdo a las carácterísticas, éstas son el peso total (incluyendo el circuito, microprocesador y batería), el rango del movimiento y el tiempo en que se efectúa el movimiento flexión-extensión.
Agradecimientos
Los autores agradecen al Instituto Politécnico Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME), Unidad Zacatenco y al Consejo Nacional de Ciencia y Tecnología (CONACYT) con No. de registro 513359 por el apoyo brindado.
REFERENCIAS
1. Instituto Nacional de Estadística y Geografía (INEGI), "Censo de Población y Vivienda: Cuestionario ampliado de Estados Unidos Mexicanos/Población con discapacidad," 2010, http://cuentame.inegi.org.mx/poblacion/discapacidad.aspx?tema=P. [ Links ]
2. Rehabilitación Integral de México (MMP), "Órtesis y Prótesis," 2005, http://www.rehabilitacionintegraldemexico.com.mx/PandO.htm. [ Links ]
3. Instituto nacional de rehabilitación (INR), "Laboratorio de Órtesis y Prótesis," 2014, http://www.inr.gob.mx/. [ Links ]
4. Instituto de Seguridad y Servicios Sociales de los Trabajadores del Estado (ISSSTE), "Prótesis a pacientes," 2013, http://www2.issste.gob.mx:8080/. [ Links ]
5. Instituto Mexicano del Seguro Social (IMSS), "Aparatos de Órtesis, Prótesis y Ayudas Funcionales," 2014, http://www.imss.gob.mx/. [ Links ]
6. Ortoprotec, "Prótesis," 2013, http://www.ortoprotec.com/contacto.php. [ Links ]
7. ProBionics: diseño y desarrollo de órganos artificiales, "Prótesis de brazo," 2013, http://www.probionics.com.mx/. [ Links ]
8. R. Zambudio, Prótesis, ortesis y ayudas técnicas, Elsevier Masson: España, pp.352, 2009. [ Links ]
9. H. Hermens, H. B. Frenks, "Surface ElectroMyoGraphy Application Areas and Parameters," Proceedings of the third general SENIAM workshop, Aachen, Germany, May 1998, ISBN 90-75452-10-1. [ Links ]
10. B. Gerdle, S. Karlsson, S. Day, M. Djupsjobacka, "Acquisition, Processing and Analysis of the Surface Electromyogram," Windhorst U and Johansson H. (eds.) Modern Techniques in Neuroscience, Springer Verlag, Berlín, pp. 705-755, 1999. [ Links ]
11. A. Ramírez, R. Muñoz, L. Leija, A. Vera, "Sistema de Entrenamiento Muscular con Retroalimentación Visual," Pan American Health Care Exchanges. Conference, Workshops, and Exhibits, Long Beach, California. 2006. ISBN 970-94677-0-0. [ Links ]
12. A. Searle, L. Kirkup, "A direct comparison of wet, dry and isolating bioelectric recordings electrodes," Departament of Applied Physics, University of Technology NSW, Australia, 2007. [ Links ]
13. R. Merletti, P.A. Parker, Electromyography: Physiology, Engineering, and Noninvasive Applications, John Wiley & Sons, pp. 494, 2004. [ Links ]
14. R. N. Scott, "An Introduction to Myoelectric Prostheses," In UNB Monographs on Myoelectric Prostheses, University of New Brunswick, Institute of Biomedical Engineering, Frederickton, pp.17, 1984. [ Links ]
15. R.F. Weir, "Design of Artificial Arms and Hands for Prosthetic Applications," Northwestern University Prosthetics Research Laboratory, and Rehabilitation Engineering Research Center, Chicago, 2003. [ Links ]
16. A. Salman, J. Iqbal, U. Izhar, "Optimized Circuit for EMG Signal Processing," Robotics and Artificial Intelligence (ICRAI) International Conference on, Pakistan, pp.208-213, 2012. [ Links ]
17. S. Micera, G. Vannozzi, A. Sabatini, P. Dario, "Improving detection of muscle activation intervals," IEEE Engineering in Medicine and Biology Magazine, vol. 20, no. 6, pp. 38-46, 2001. [ Links ]
18. A. Thexton, "A randomisation method for discriminating between signal and noise in recordings of rhythmic electromyographic activity," J. Neurosc. Meth., vol. 66, no. 2, pp. 93-98, 1996. [ Links ]
19. G. Chang, W. Kang, J. Luh, C. Cheng, J. Lai, J. Chen, T. Kuo, "Real-Time Implementation of Electromyogram Pattern Recognition as a Control Command of Man-Machine Interface," Medical Engineering & Physics, vol. 18, pp. 529-537, 1996. [ Links ]
20. J. Drapala, K. Brzostowski, A. Szpala, A. Rutkowska-Kucharska, "Two stage EMG onset detection method," Archives of Control Sciences, vol. 22, no. 4, pp. 427-440, 2012. [ Links ]
21. X. Li, A. Aruin, "Muscle Activity Onset Time Detection Using Teager-Kaiser Energy Operator," IEEE Engineering in Medicine and Biology 27th Annual Conference, China, pp.7549-7552, 2005. [ Links ]
22. S. Mukhopadhyay, G.C. Ray, "A New Interpretation of Nonlinear Energy Operator and Its Efficacy in Spike Detection," Biomedical Engineering, IEEE Transactions on, vol. 45, no. 2, pp. 180-187, 1998. [ Links ]
23. J. Biurrun, C. Morch, O. Andersen, "Teager-Kaiser Energy Operator Improves the Detection and Quantification of Nociceptive Withdrawal Reflexes from Surface Electromyography," 18th European Signal Processing Conference, Denmark, pp.910-913, 2010. [ Links ]
24. A. Merlo, D. Farina, R. Merletti, "A Fast and Reliable Technique for Muscle Activity Detection from Surface EMG Signals," IEEE Transactions on Biomedical Engineering, vol. 50, no. 3, Italy, pp. 316-323, 2003. [ Links ]
25. R. Merletti, "Standards for Reporting EMG data," Journal of Electromyography and Kinesiology, vol. 9, no. 1, 1999. [ Links ]
26. Texas Instruments, "Datasheet filtro activo universal UAF42," 2010, http://pdf.datasheetcatalog.com/datasheet/texasinstruments/uaf42.pdf. [ Links ]
27. Motion Control: Keeping Life in Motion, "Prosthesis: Utah Arm," 2011, http://www.utaharm.com/. [ Links ]
28. Hosmer, "NY Electric Elbow," 2013, http://www.hosmer.com. [ Links ]
29. Liberating Technologies, "Arm Systems for Adults," 2013, http://www.liberatingtech.com/. [ Links ]
30. Ottobock, "Upper Limb Prosthetics," 2014, http://www.ottobock.com.mx. [ Links ]
31. J.E. Shigley, J. Uicker, Teoría de Máquinas y Mecanismos, MC Graw Hill, pp .603, ISBN: 968-451-297, 2001. [ Links ]
32. R. Mott, Diseño de elementos de máquinas, Pearson Educación, pp. 872, ISBN: 9702608120, 9789702608127, 2006. [ Links ]
33. R. Ávila, L. Prado, ET. AL., "Dimensiones antropométricas de población latinoamericana," Universidad de Guadalajara: Centro de Investigaciones en Ergonomía, México, pp. 24-276, 2001. [ Links ]
34. I. Miralles, Biomecánica clínica de las patologías del aparato locomotor, Elsevier, pp. 446, ISBN: 84-458-1680-2, 2007. [ Links ]
35. C. J. De Luca, "Surface electromyography: Detection and recording," DelSys Incorporated, pp. 10, 2002. [ Links ]
36. S. Day, "Important factors in surface EMG measurement," Bortech Biomedical Ltd., Calgary, pp. 17, 2002. [ Links ]
37. D. F. Stegeman, H. J. Hermens, "Surface EMG for non-invasive assessment of muscles (SENIAM)," Standards for surface electromyography: the European SENIAM project. pp. 108-112. [ Links ]
38. Centri, "Prosthetics-upper," 2013, http://www.centri.se. [ Links ]
39. C. Connolly, "Prosthetic Hands from Touch Bionics," Industrial Robot: An International Journal, vol. 35, no. 4, pp. 290-293, 2008. [ Links ]

