











 text new page (beta)
text new page (beta) Spanish (pdf)
Spanish (pdf)
 Article in xml format
Article in xml format Article references
Article references
 Send this article by e-mail
Send this article by e-mail Cited by SciELO
Cited by SciELO  Similars in
SciELO
Similars in
SciELO 
 Permalink
Permalink
Introducción
La enfermedad vascular cerebral (EVC) es un grave problema que en México afecta a 118 personas por cada 100 000 habitantes anualmente, generando un alto costo económico y humano en la atención a estos pacientes (Instituto Mexicano del Seguro Social [IMSS], 2015). La Asociación Mexicana de Enfermedad Vascular Cerebral (Amevasc) A. C. estima que cada paciente representa un gasto aproximado de 23 700 dólares al año (Ruiz-Sandoval, 2016), además de costos no cuantificados derivados de la fatiga emocional del paciente de EVC y sus familiares.
De acuerdo con la Organización Mundial de la Salud (OMS), la EVC constituye la segunda causa de muerte a nivel mundial (9.7%) y la cuarta en México (World Health Organization [WHO], 2018). Los principales problemas derivados de la EVC son las secuelas motoras que sufren los sobrevivientes, por lo general, debilidad o parálisis de brazos y manos. Estas secuelas causan que los pacientes sean incapaces de sujetar o alcanzar objetos voluntariamente y esto deriva en la dificultad para realizar actividades básicas de la vida diaria, tales como: vestirse, alimentarse, asearse, etc. En general, los pacientes afectados por la EVC requieren de un familiar o cuidador que los asista en sus actividades de la vida diaria (Vafadar et al., 2015). Se estima que entre el 85% y 90% de los afectados por EVC con discapacidad motora de miembro superior no recuperan la función totalmente, a pesar de la existencia de numerosos programas de rehabilitación (Vafadar et al., 2015). Lo anterior se debe principalmente a la dificultad de los programas de rehabilitación intensivos y la utilización de terapias con ejercicios repetitivos y monótonos que desaniman al paciente en su proceso de recuperación (Devesa et al., 2014).
Con el objetivo de reducir estas dificultades, han surgido diferentes propuestas para lograr una mejor recuperación motora. Las tecnologías y propuestas más prometedoras son los estimuladores cerebrales no-invasivos, los robots rehabilitadores de miembro superior e inferior, las interfaces cerebro-computadora, la neuroprótesis, la estimulación eléctrica funcional (EEF) y la estimulación eléctrica medular (EEM). Sin embargo, la mayoría de ellas aún se encuentra en fase de investigación, experimentación o validación (Iosa et al., 2012).
En este artículo se abordan las técnicas de EEF y EEM, que son menos invasivas y requieren una menor complejidad comparadas con el resto de las técnicas.
La EEF implica inducir artificialmente una corriente en motoneuronas específicas para generar contracción muscular. Las motoneuronas son estimuladas mediante una serie de pulsos eléctricos con duración de 50 μs a 500 μs, los cuales son suministrados utilizando electrodos. Estos electrodos pueden ser transcutáneos (colocado sobre la piel), percutáneos (colocados dentro del músculo), epimisarios (colocados sobre el músculo) o implantados (colocados alrededor del nervio de estimulación) (Lynch & Popovic, 2008). La intensidad de estimulación está en función de la energía total transferida al músculo, la cual depende de la amplitud del pulso, duración y frecuencia, así como de la forma del tren de pulsos. En la Figura 1 se muestra un tren de pulsos bipolar asimétrico, el cual corresponde a la forma de estimulación más comúnmente reportada en la literatura (Derungs et al., 2017; Maksay, 2009; Simcox et al., 2004; Stewart et al., 2016).

Fuente: Elaboración propia.
Figura 1 Tren de pulsos más común para la estimulación eléctrica funcional (EEF).
Por otro lado, la EEM es una técnica de estimulación eléctrica en la que se suministra corriente directa de 1 mA a 3 mA al tejido medular por medio de electrodos, estos electrodos pueden ser implantables o transcutáneos (Bendersky & Yampolsky, 2014) y la estimulación se puede realizar con corriente directa (CD) o con corriente alterna (CA). De acuerdo con la literatura, las características más comunes de la EEM transcutánea son las que se muestran en la Tabla 1 (Cogiamanian et al., 2012; Danner et al., 2016; Marangolo et al., 2017).
Tabla 1 Características eléctricas más comunes para la estimulación medular.
| Tipo de corriente |
Ancho de pulso (ms) |
Frecuencia (Hz) | Amplitud (mA) | Tiempo de estimulación (min) |
| CD | N/A | N/A | 0.1 - 10 | 10 - 30 |
| CA | 0 - 1 | 10 - 60 | 0 - 125 | 10 - 30 |
Fuente: Elaboración propia.
La EEF ha mostrado resultados promisorios en la recuperación motora del miembro superior en pacientes con secuelas motoras post-EVC (Howlett et al., 2015). Además, en conjunto con terapia de aprendizaje motor, la EEF ha ayudado a recuperar la coordinación y el desempeño en tareas funcionales en pacientes con disfunción persistente de miembro superior (>1 año) post-EVC (McCabe et al., 2015).
Por otro lado, la EEM representa un enfoque prometedor. Actualmente se encuentra en etapa experimental y de validación para activar los circuitos espinales, buscando la recuperación de la marcha y la movilidad en miembros superiores en modelos animales (van den Brand et al., 2015), primates (Nishimura et al., 2013) y roedores (Kasten et al., 2013; Song et al., 2015).
No obstante, todas las pruebas realizadas hasta ahora en modelos animales se basan en la estimulación mediante electrodos invasivos, colocados directamente sobre la médula espinal mediante procesos quirúrgicos, con todos los riesgos y costos que estos implican (Bendersky & Yampolsky, 2014).
En los años 2014 y 2015 se reportaron pruebas preliminares con EEM usando electrodos superficiales, eliminando así los riesgos y costos propios de las cirugías para implantar los electrodos invasivos (Gerasimenko et al., 2015; Hofstoetter et al., 2014; Sasada et al., 2014). A esta técnica se le conoce como EEM no invasiva, pero para lograr una adecuada estimulación a través de la piel, se requieren dispositivos electrónicos con características más demandantes, comparados con los estimuladores invasivos. Estos requerimientos son: mayor potencia, más secuencias de activación, más formas de onda de estimulación y mayor número de electrodos.
A la fecha solo se han reportado tres estudios empleando EEM no invasiva, dos de ellos enfocados en rehabilitación de miembros inferiores (Gerasimenko et al., 2015; Hofstoetter et al., 2014; Sasada et al., 2014) y solamente uno enfocado en pacientes con secuelas de EVC (Picelli et al., 2015).
Derivado del análisis del estado del arte, se puede inferir que una de las grandes dificultades para realizar la estimulación no invasiva tipo EEM es la falta de sistemas que sean capaces de brindar las características eléctricas mencionadas con anterioridad y, adicionalmente, que generen ambos tipos de estimulación de forma simultánea (EEM y EEF). Es decir, hasta ahora no existen estimuladores capaces de entregar pulsos con la potencia y características necesarias para realizar EEM y EEF de forma transcutánea.
Algunos estimuladores para EEF que se han propuesto para tratar lesiones medulares (Ambrosio et al., 2015; Simcox et al., 2004), capaces de entregar hasta 200 Vpp y hasta 6.25 mA, no pueden proporcionar los valores de corriente requeridos para realizar la EEM.
De acuerdo con Cogiamanian et al. (2012), Danner et al. (2016), Hofstoetter et al. (2018), Inanici et al. (2018) y Priori et al. (2014), la estimulación medular requiere una corriente constante de 0.1 mA a 10 mA, con intervalos de 10 a 30 minutos. Los estimuladores reportados no cumplen totalmente con estas características.
Con los datos reportados hasta ahora en el estado del arte (Ambrosio et al., 2015; Cogiamanian et al., 2012; Danner et al., 2016; Gerasimenko et al., 2015; Kasten et al., 2013; Knutson et al., 2015; Lynch & Popovic, 2008; Popovic & Keller, 2005; Woods et al., 2016) se realizó la Tabla 2, donde se muestran los rangos de los parámetros de estimulación para EEF y la EEM.
Tabla 2 Parámetros de diseño del sistema de estimulación.
| Parámetro | EEF | EEM - CD |
| Amplitud Pico pico | 0.1 mA-190 mA | 0.1 mA-5 mA |
| Ancho de pulso | 0 μs-500 μs | N/A |
| Frecuencia | 0 Hz-150 Hz | N/A |
Fuente: Elaboración propia con datos de Ambrosio et al. (2015), Cogiamanian et al. (2012), Gerasimenko et al. (2015), Knutson et al. (2015), Lynch & Popovic (2008), Nishimura et al. (2013), Popovic & Keller (2005) y Woods et al. (2016).
En la Tabla 3 se muestra un resumen de las principales investigaciones relacionadas al objetivo de este trabajo.
Tabla 3 Comparación de diferentes sistemas propuestos para estimulación medular o similar.
| Autores | Aplicación | Corriente de salida |
Ancho de pulso |
Frecuencia | Forma de onda |
Topología de etapa de potencia |
Fuente de alimentación |
Seguridad eléctrica |
| Ambrosio et al. (2015) | Lesión en médula espinal | 10 mA-100 mA | 250 μs-500 μs | 20 Hz-100 Hz | Pulsos monopolares y bipolares | Puente H | Fuente de corriente controlada por voltaje y una etapa de alto voltaje (mayor a 200 V) | No se menciona |
| Maksay (2009) | Lesión en médula espinal | 0 mA-100 mA | 40 μs-500 μs | 25 Hz-300 Hz | Bipolares | Fuentes de alimentación conmutadas | convertidor elevador | Baterías y corte de energía |
| Stewart et al. (2016) | Miembro superior EVC | 0 mA-115 mA | 0 μs-350 μs | 30 Hz | Pulsos monopolares y bipolares | Puente H | Controlado por voltaje con retroalimentación de la corriente. Alimentación de 3 V DC y puede tener una salida de hasta 46 V | Aislamiento galvánico |
| Simcox et al. (2004) | Lesión de médula espinal | 0 mA-216 mA | 25 μs-500 μs | 17 Hz, 20 Hz, 25 Hz, 33 Hz, 50 Hz y 100 Hz | Pulsos bipolares | Puente H utilizando interruptores de alto voltaje | Fuente de alimentación de alto voltaje, 200 V | La carcasa cumple con la IE 60601-1 |
| Veloz (2015) | Movimiento motor en músculo inervado/denervado | N/A | 180 μs | 10 Hz | Pulsos bipolares | Configuración tipo AB, Darlington | Fuente de poder: voltaje ajustable | Optoacoplador |
| Zapata (2010) | Miembros distales, mano | N/A | 20 μs-800 μs | 50 Hz-100 Hz | Pulsos bipolares | Circuito en contrafase usando transistores en configuración Darlington | Transformador de alimentación de 220 V | No se menciona |
| Alonso (2015) | Vejiga neurogénica | 0.2 mA- 7 mA | 0 ms-999 ms | 0-99.9 ciclos por minuto | Configuración de puente H, con transistores | Fuente aislada de alto voltaje. Voltaje de Salida 300 V | No se menciona |
Fuente: Elaboración propia.
Como se puede observar en la Tabla 3, se han reportado diversos estimuladores basados en varias configuraciones de etapas de potencia, algunas de ellas no cuentan con las características de seguridad eléctrica necesarias y otras no alcanzan los rangos de voltaje y corriente necesarios para una correcta estimulación tipo EEF o para la estimulación tipo EEM. Además, algunos de estos estimuladores utilizan topologías electrónicas que comprometen la seguridad del paciente, como las configuraciones de amplificación tipo boost, que no están aisladas, o topologías que son inestables (Maksay, 2009; Stewart et al., 2016).
Con el fin de proporcionar un sistema electrónico capaz de cumplir con los requisitos necesarios para una adecuada estimulación bimodal EEM y EEF, en este artículo se presenta el prototipo de una etapa de potencia que cumple con los parámetros necesarios para usarse en pruebas de rehabilitación en pacientes con EVC. Contar con un dispositivo de estas características permitiría generar nuevas terapias de rehabilitación en pacientes con EVC usando ambos tipos de estimulación eléctrica no invasiva (EEF y EEM).
El objetivo final del proyecto del que forma parte este artículo es la aplicación de este prototipo mediante protocolos clínicos que permitan generar una alternativa no invasiva de rehabilitación motora de miembro superior en pacientes con EVC. El diseño y simulaciones de la arquitectura electrónica del estimulador al que se refiere en este trabajo ya ha sido presentado en Leyva et al. (2018), y en este trabajo se presenta la construcción y pruebas preliminares del prototipo construido.
Materiales y Métodos
Desarrollo
Con el fin de cumplir los parámetros indicados en la Tabla 2, se partió del diagrama a bloques mostrado en la Figura 2. Cada bloque se detalla a continuación.
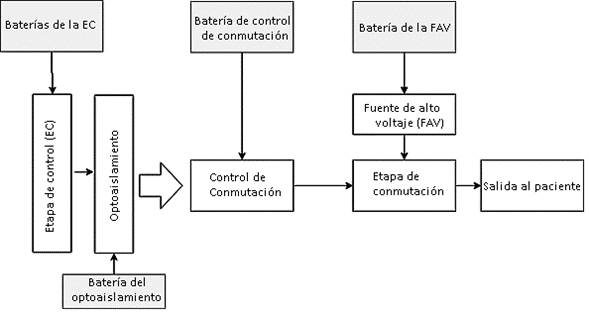
Fuentes de alimentación
Como se puede observar en la Figura 2, el prototipo requiere de diversas fuentes de alimentación para funcionar de manera adecuada y proporcionar seguridad eléctrica a los pacientes que sean estimulados. Para este prototipo, la batería de la EC proporciona 5 VCD con una corriente menor a 200 mA. La batería del optoaislamiento proporciona 10 VCD con una corriente de 100 mA, su función es alimentar la etapa de salida de los optoacopladores usados para aislar la etapa de control (EC) y la etapa de potencia.
La batería de control de conmutación proporciona 12 VCD con una corriente de 200 mA. Esta fuente se encarga de alimentar los circuitos secundarios para controlar los dispositivos de conmutación (transistores). Finalmente, la batería de la FAV se compone de cuatro pilas recargables modelo NCr20700b (Sanyo. Inc), capaces de entregar hasta 4250 mA y 3.7 V, las cuales alimentan un módulo 12QP200 (Pico Electronics.Inc) que eleva el voltaje a 200 VCD con una corriente de salida de 250 mA.
Este voltaje será aplicado al paciente, controlando la corriente y duración de pulsos de acuerdo con el tipo de estimulación requerido. El uso de fuentes de energía aisladas garantiza un sistema electrónico aislado galvánicamente de la red eléctrica, incrementando así la seguridad al paciente.
Etapa de Control (EC)
Como se describe en Leyva et al. (2018), la etapa de control de pulsos se implementó con una tarjeta Arduino Uno. La tarjeta se programó para generar pulsos que permiten realizar diversas configuraciones de los parámetros de estimulación, como son: frecuencia, ancho de pulso y control de corriente en la etapa de potencia. La EC es capaz de generar formas de onda con la frecuencia y ancho de pulso necesarios (0 Hz a 150 Hz y 0 µs a 500 µs). Más detalles de la programación de la tarjeta Arduino se pueden encontrar en Leyva et al. (2018).
Etapa de aislamiento
Esta etapa se implementó con optoacopladores 6N136 (Vishay Semiconductors), seguidos de un OPAM LM324 (Texas Instruments). En la Figura 3 se muestra el diagrama electrónico. Esta etapa realiza dos funciones: aislar los pulsos generados en la etapa de control e incrementar la amplitud de dichos pulsos a 10 Vp. El potenciómetro (10 kΩ) a la salida del optoacoplador sirve para controlar esta amplitud entre 0 Vp y 10 Vp, el OPAM LM34 funciona como seguidor de tensión para acoplar impedancias con la siguiente etapa.

Control de conmutación y Etapa de conmutación
Para esta etapa se desarrolló el circuito electrónico que se muestra en la Figura 4. Este circuito, en conjunto con la Etapa de Control, es capaz de generar pulsos bipolares de corriente controlada, con las características requeridas para realizar EEF y también genera corriente directa para la EEM. Los detalles sobre el funcionamiento de este diagrama se pueden encontrar en Leyva et al. (2018), se replica aquí el diagrama y la ecuación (1) que rige su comportamiento:

Fuente: Leyva et al. (2018).
Figura 4 Diagrama electrónico de la Etapa de control de conmutación y Etapa de conmutación.
donde DAC1 y DAC2 representan la amplitud de voltaje entregada a la etapa de control de conmutación en un rango de 0 V a 10 V.
En la Figura 5 se muestra cada uno de los circuitos/módulos (etapa de control y conmutación, FAV y baterías) que conforman el prototipo desarrollado y con el cual se realizaron las pruebas experimentales.

En la siguiente sección se detallan las pruebas realizadas para validar al sistema realizado, así como las pruebas realizadas en un sujeto de prueba.
Resultados
Pruebas para caracterizar pulsos para EEF
Uno de los problemas más comunes en los sistemas de estimulación es la incapacidad de mantener la amplitud del voltaje durante pulsos con duración amplia. En la Figura 6 se puede observar cómo el sistema propuesto mantiene estable la amplitud del voltaje durante 500 µs, que es la duración máxima deseable para la estimulación EEF.

Fuente: Elaboración propia.
Figura 6 Señal generada con pulsos de control de 150 Hz, 500 µs de ancho de pulso y amplitud de 9.5 V. Las formas de onda superiores son de los pulsos de control y la forma de onda inferior es de la salida del sistema.
Las pruebas se realizaron con una resistencia de 1 kΩ conectada a la salida, que es la carga nominal con la que se caracterizan este tipo de estimuladores.
Por otro lado, se corroboró que el control de corriente teórico del circuito propuesto realmente proporcione la corriente de estimulación deseada. De acuerdo con la ecuación (1), la corriente de estimulación depende de la amplitud de voltaje de los pulsos DAC1 y DAC2. En la Tabla 4 se observan los valores calculados y los valores medidos obtenidos cuando se varía la amplitud de los pulsos DAC1 y DAC2 de manera simétrica.
Tabla 4 Pruebas de caracterización de la etapa de potencia.
| Amplitud del pulso (V) |
Corriente de salida (mA Pico-pico) |
Valores calculados (mA Pico-pico) |
| 0.5 | 6.4 | 11.1 |
| 1 | 16 | 22.2 |
| 1.5 | 26 | 33.3 |
| 2 | 40 | 44.4 |
| 2.5 | 52 | 55.5 |
| 3 | 62 | 66.6 |
| 3.5 | 72 | 77.7 |
| 4 | 86 | 88.8 |
| 4.5 | 100 | 100 |
| 5 | 110 | 111.1 |
| 5.5 | 120 | 122.2 |
| 6 | 132 | 133.3 |
| 6.5 | 144 | 144.4 |
| 7 | 154 | 155.6 |
| 7.5 | 164 | 166.7 |
| 8 | 176 | 177.8 |
| 8.5 | 184 | 188.9 |
| 9 | 202 | 200 |
| 9.5 | 206 | 211.1 |
Fuente: Elaboración propia.
Los datos presentados muestran un comportamiento casi lineal entre el voltaje de control y la corriente proporcionada. El hecho de que el sistema proporcione corriente controlable en un rango de 6 mA hasta 206 mA, y que la amplitud de voltaje no se vea afectada aun con duraciones de 500 µs de ancho de pulso, confirma que cumple con los parámetros establecidos en la Tabla 2 y, por tanto, es factible para su aplicación en EEF.
Caracterización de pulso EEM
Como se mencionó en la introducción, un estimulador para EEM de tipo CD debe cumplir con los parámetros establecidos en la Tabla 2. Se realizaron mediciones para verificar si el sistema es capaz de proporcionar el nivel de corriente necesario de manera controlada. La Tabla 5 muestra cómo, a partir de la amplitud de un voltaje de control, se puede controlar la cantidad de corriente que proporciona la etapa de potencia. En la tabla se muestra solo hasta 5 mA de corriente sostenida, aunque el dispositivo puede proporcionar corrientes superiores.
Pruebas de seguridad eléctrica
Con el fin de comprobar el consumo de corriente del dispositivo y las corrientes de fuga, se realizaron algunas pruebas de seguridad eléctrica, las cuales se llevaron a cabo en el Laboratorio de la División de Investigación en Ingeniería Médica del Instituto Nacional de Rehabilitación Luis Guillermo Ibarra Ibarra (INR-LGII).
Para medir la corriente máxima consumida, se programó el dispositivo para generar pulsos máximos reportados en el estado del arte, como son una corriente de (190 mA), frecuencia (150 Hz) y duración de pulso (500 µs). Se usó una punta de corriente TCP0030A, 120MHz (Tektronix) y un osciloscopio MDO3104 (Tektronix). La Figura 7 muestra la gráfica de los picos de corriente medidos en la batería de la FAV (Figura 2).

Fuente: Elaboración propia.
Figura 7 Prueba de consumo de corriente de baterías (5.5 A) cuando se estimula con una corriente de salida de 190 mA.
Se midió un consumo de corriente pico de 5.76 A (7.4 V) cuando se generan los pulsos de estimulación y un consumo sostenido de 200 mA cuando no hay pulsos. Los circuitos de control de conmutación consumen 50 mA (12 V) estimulando y 12 mA cuando están en modo de espera. Por lo tanto, la potencia constante consumida por el dispositivo es de 2.08 W y alcanza picos de hasta 43.2 W en los pulsos de estimulación con mayor demanda, con duración menor a 500 µs.
Para evaluar la seguridad al paciente, se midió la corriente de fuga del dispositivo hacia el paciente. Para ello se empleó el analizador de seguridad ESA 620 (FLUKE) y se obtuvo una corriente de 0.1 µA. Este valor cumple con la norma establecida por la Comisión Internacional Electrotécnica (IEC, por sus siglas en inglés), la cual establece una corriente de fuga máxima permisible para este tipo de aparatos en 10 µA.
En la Tabla 6 se muestran las principales características obtenidas con el dispositivo desarrollado.
Tabla 6 Parámetros de estimulación y especificaciones técnicas de la etapa de potencia.
| Formas de onda de estimulación | Bipolar, monopolar y CD |
| Corriente de salida | 0 mA - 200 mA |
| Ancho de pulso | 50 μs - 500 μs |
| Frecuencia de estimulación | 0 Hz - 150 Hz |
| Dimensiones | 14.5 cm x 7 cm |
| Peso | 200 gr |
| FAV | 200 V, 250 mA |
| Corriente máxima consumida en estimulación | 5.81 A |
| Corriente consumida en reposo | 212 mA |
| Corriente de fuga | 0.1 μA |
Fuente: Elaboración propia.
Prueba de estimulación
Con el propósito de validar el funcionamiento del sistema al realizar una estimulación en humanos, se realizó una prueba en un sujeto de 27 años, masculino. El protocolo para realizar la prueba de estimulación fue aprobado por el comité de investigación del INR con número de registro INR/CI/38/16.
El procedimiento de prueba consistió en lo siguiente:
Explicar al sujeto de prueba sobre el procedimiento y entregar la carta de conocimiento informado para su revisión y firma.
Colocar al sujeto sentado, en una posición confortable, con su brazo sobre una mesa colocada frente a él.
Se eligió realizar una estimulación para promover la extensión del pulgar y la muñeca, con la colocación de electrodos, como se recomienda en Taylor et al. (2002). Para este tipo de estimulación se requieren solo dos electrodos. El electrodo negativo se colocó próximo a la muñeca (área inferior de la muñeca) y el electrodo positivo se colocó sobre la superficie tendinosa flexora del antebrazo (área media del antebrazo), como se indica en la Figura 8.

Fuente: Figura modificada a partir de Taylor et al. (2002).
Figura 8 Colocación de los electrodos en el sujeto de prueba.
Se utilizaron electrodos Dura-stick Plus Cuadrado C-42193, autoadheribles, usados comúnmente para este tipo de estimulación. Antes de colocar los electrodos, se limpió la piel con algodón humedecido en alcohol, con la finalidad de reducir la impedancia y lograr un mejor contacto electrodo-piel.
Se utilizó el osciloscopio (Tektronix, MDO3104) para observar la corriente de estimulación. La punta de corriente del osciloscopio se conectó directamente en los puntos de conexión de los electrodos. Para realizar la estimulación por medio los pulsos bipolares se establecieron trenes de pulsos con amplitudes máximas de 20 mA pico-pico y frecuencia de 50 Hz, valores que se encuentran dentro de los rangos utilizados para este tipo de estimulación. En la Figura 9 se muestra la forma de onda observada durante un pulso bipolar de estimulación.
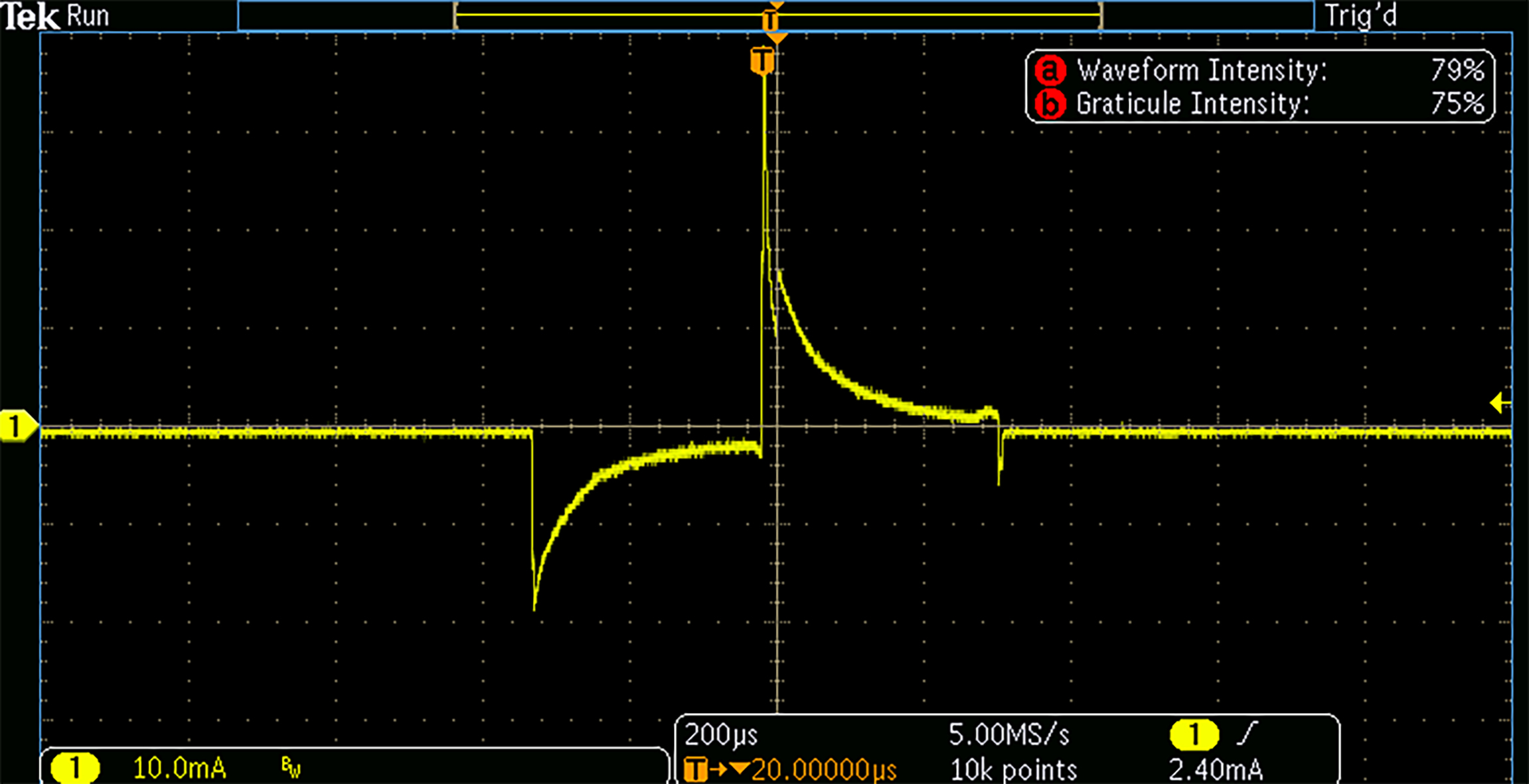
Fuente: Elaboración propia.
Figura 9 Pulso bipolar generado por la etapa de potencia aplicado a los músculos flexores de la palma.
El sujeto no reportó molestia durante la estimulación y no presentó ningún efecto adverso. Es importante mencionar que el prototipo aquí propuesto forma parte de un proyecto enfocado en la estimulación y adquisición de señales mioeléctricas superficiales (sEMG) simultáneamente para controlar una neuroprótesis por medio de sEMG y EEF. Más detalles sobre estos avances se pueden ver en Toledo-Peral et al. (2018).
Las pruebas de caracterización y la prueba preliminar del dispositivo propuesto permiten concluir que este podrá ser usado de forma segura, dentro de los parámetros establecidos, para el desarrollo de estudios y protocolos clínicos de rehabilitación de pacientes con enfermedad vascular cerebral a corto plazo.
Discusión
Como se estableció en la introducción de este trabajo, hasta donde los autores saben, no existe un dispositivo de tipo comercial o a nivel prototipo capaz de cumplir con las características requeridas para estimulación EEM y EEF de manera simultánea. En este trabajo se presentó el desarrollo, caracterización y una prueba preliminar de una propuesta para cubrir este problema.
El sistema propuesto presenta algunas mejoras importantes con respecto a algunos sistemas similares reportados en el estado del arte, por ejemplo el trabajo de Maksay (2009), donde se describe un estimulador que, si bien fue capaz de estimular, carece de la potencia necesaria, ya que los pulsos generados presentaban una deformación para corrientes de 100 mA y superiores. Como se vio en los resultados logrados con el diseño aquí presentado, los pulsos generados por nuestro prototipo no presentan ese problema aun a corrientes de hasta 200 mA.
Otra característica importante del diseño, con respecto al estado del arte, son las medidas de seguridad adoptadas, tanto para el circuito mismo como para el paciente. Con la finalidad de obtener un prototipo que cumpla criterios de seguridad eléctrica, se diseñaron e implementaron las siguientes medidas se seguridad para el módulo de potencia: circuitos electrónicos de protección, un aislamiento tipo F a la etapa (alimentación por baterías), la limitación de energía máxima liberada y un circuito de protección para prevenir la conexión de la batería con la polaridad invertida. Además, se comprobó que cumple con las pruebas eléctricas realizadas por medio de un analizador de seguridad eléctrica ESA 620 (FLUKE).
Es importante mencionar que la FAV es aislada y alimentada por baterías, lo cual permite contar con un dispositivo que garantice que el paciente no sufra un choque eléctrico por fallo en la fuente de alimentación y alguna puesta a tierra accidental. El control de corriente ha probado ser funcional y estable, se garantiza una correcta estimulación al paciente y, con ello, se podrán explorar nuevas terapias de estimulación con fines de rehabilitación.
Por supuesto, el diseño aún es un prototipo y falta mejorar en diversos rubros. Uno de ellos es optimizar la sección de la etapa de control, quizá con un microcontrolador de mejores capacidades que permita generar formas de onda mucho más complejas (exponenciales, moduladas en pulsos bipolares por periodo UPWM) u otras formas de onda aún no exploradas que permitan una estimulación más efectiva y selectiva. También, es muy deseable que el circuito impreso se rediseñe y que sus componentes se optimicen para lograr un dispositivo mucho más compacto, con precio accesible, para impulsar su disponibilidad y más versátil para ser utilizado en diversas pruebas clínicas y de investigación.
Conclusiones
El trabajo presentado cumplió con el objetivo de desarrollar e implementar una etapa de potencia para un prototipo de estimulador capaz de brindar estimulación bimodal (EEF y EEM). Las pruebas realizadas demostraron la capacidad del prototipo para funcionar con cualquiera de estas dos modalidades de estimulación. Es capaz de proporcionar energía que cumple con los parámetros requeridos para estimulación EEF (de 0 mA a 200 mA de amplitud de corriente, ancho de pulso en un rango de 0 µs a 500 µs y frecuencia variable en un rango de 0 Hz a 150 Hz) y EEM (1 mA CD a 5 mA CD) en un solo estimulador.
El siguiente paso en el desarrollo del prototipo presentado en este trabajo será realizar una prueba clínica piloto con pacientes con EVC, basado en un protocolo clínico determinado por médicos en el INR-LGII, usando ambos tipos de estimulación eléctrica (EEF y EEM) como una alternativa de rehabilitación motora de miembro superior en pacientes con EVC y utilizando estimulación eléctrica bimodal de manera no invasiva.
Conflictos de interés
Los autores declaran que no existe ningún conflicto de interés

