











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introducción
La compactación del suelo es la reducción del espacio poroso entre los agregados del suelo; es el incremento de la densidad aparente del suelo comparado con su estado no compactado (Bouma, 2012). Es uno de los mayores problemas en la agricultura y representa una de las mayores amenazas en la calidad del suelo sustentable (Keller y Lamandé, 2012). Según Kauser, Pal, Haq y Khwairakpam (2020), algunas especies de malezas pueden provocar problemas ambientales. El tráfico de los animales y la maquinaria utilizados en las actividades agrícolas representan la causa principal de la compactación del suelo (Lipiec, 2012).
El incremento en la densidad del suelo reduce su capacidad de permeabilidad y de infiltración, por lo que el agua de lluvia se desplaza sobre el suelo compactado por escurrimiento superficial y no puede ser aprovechada por las raíces de las plantas. El aire en el suelo resulta importante debido a la respiración realizada por las raíces de las plantas, éstas dependen del oxígeno en el suelo. Las raíces no fotosintetizan y emiten dióxido de carbono y recogen oxígeno durante la respiración. La difusión de los gases en el suelo prácticamente se detiene cuando la fracción de aire que llena a los poros es menor del 10% (Kirkham, 2014). Por consiguiente, las raíces necesitan al menos 10% por volumen de espacio de aire en el suelo para sobrevivir (Kirkham, 1994). El grado de reducción de la porosidad del suelo causada por la compactación es suficiente para limitar los procesos biológicos, la penetración de las raíces y afecta la infiltración de agua, así como los flujos de dióxido de carbono y metano del suelo con la atmósfera (Epron et al., 2016).
La labranza vertical es un tipo de labranza de conservación que mejora la aireación y la infiltración del agua de lluvia en el suelo sin necesidad de voltear el prisma del suelo, por lo cual no degrada la estructura de los agregados ni produce los efectos negativos que se derivan de ésta, como sucede en la labranza convencional. La mecanización de la agricultura ha resultado en un incremento del peso de la maquinaria provocando daño progresivo en el subsuelo y por ende en daños económicos y ecológicos. Por ejemplo, en los últimos diez años, la carga de las ruedas de las cosechadoras combinadas se ha incrementado hasta en un 65% (Graves et al., 2015; Keller, Sandin, Colombi, Horn y Or, 2019; Håkansson, 2005; Schjønning et al., 2015).
La utilización de un rodillo aireador provisto de cuchillas es una alternativa viable para incrementar la aireación e infiltración del agua de lluvia en el suelo después de la cosecha del ciclo agrícola anterior y permite acondicionar las propiedades físicas del suelo con la menor alteración del mismo, para implementar posteriormente sistemas de labranza mínima y de conservación. Comercialmente, existe el rodillo aireador AerWay® desarrollado en Canadá, cuya función es abrir grietas en el suelo para mejorar y renovar la aireación e incrementar la absorción e infiltración del agua de lluvia en las diferentes actividades agrícolas, éste equipo agrícola consta de cuchillas en forma recta y curva, manufacturadas con material rígido y con un sistema hidráulico para regular la profundidad de trabajo. (http://www.aerway.com/index.php).
De acuerdo con Flores, Jiménez, Ramírez, Dominguez y Rosales (2014), el uso de rodillo aireador favorece la recuperación de la actividad forrajera, reportando incremento de la materia seca de hasta 7877 kg ha-1 en comparación con 120 kg ha-1 del área sin paso del rodillo.
Medina-Guillén et al. (2017), reporta que el uso de rodillo aireador es buena alternativa para disminuir la compactación del suelo en los primeros tres años, incrementándose, también, la infiltración de agua y una disminución en la resistencia mecánica del suelo en un matorral desértico rosetófilo.
En las operaciones de labranza y remoción del suelo, las herramientas de corte al interactuar con el suelo son sometidos a esfuerzos de tensión y compresión debidos a las resistencias a la abrasión, de corte y de penetración por la compactación del suelo, cuyas magnitudes dependen de las condiciones de operación y de las propiedades del suelo y que están directamente relacionadas con el consumo de combustibles. (Ucgul, Fielke y Saunders, 2015). Las fuerzas relacionadas con la labranza del suelo son afectadas por varios factores: la geometría de la herramienta, el ángulo de corte, y la velocidad de trabajo. (Ibrahmi, Bentaher, Hamza, Maalej y Mouazen, 2015). Si bien la fragmentación del suelo por medio de las operaciones mecánicas de labranza es necesaria para garantizar la germinación, el consumo de energía depende de propiedades del suelo y de la atmosfera. (Pires, 2020)
Al interactuar con el suelo, las herramientas de corte en un inicio se deforman dentro del límite elástico, pero al exceder los esfuerzos críticos por las elevadas resistencias de abrasión, de corte y penetración en el suelo, las cuchillas se deforman plásticamente, por lo cual disminuyen la calidad de trabajo e incluso pueden alcanzar los límites de fractura. (Keller y Lamandé, 2012; Viniegra, 2011).
Hay algunas investigaciones relacionadas con herramientas de corte y su relación con parámetros técnicos como el efecto del cambio en la velocidad de deslizamiento sobre el comportamiento de desgaste del acero (Lee, 2019), mientras Pérez, González y Toro (2010) relacionó la tasa de desgaste de cuchillas de arado rotativo con la velocidad de giro de las mismas y determinó la resistencia al desgaste abrasivo de las cuchillas. También, se ha modelado el comportamiento de las herramientas de corte y su interacción con diferentes tipos de suelo. (Zeng, Chen y Zhang, 2017).
El objetivo del presente estudio fue analizar cinemáticamente tres diferentes geometrías de cuchillas propuestas para un rodillo aireador, calcular teóricamente la cantidad de suelo removido y obtener los esfuerzos y deformaciones.
Materiales y Métodos
Análisis cinemático
Las herramientas de corte del rodillo aireador están dispuestas en discos porta-cuchillas montados de forma equidistante en un eje sólido. Las cuchillas del rodillo aireador presentan movimiento de traslación y de rotación al mismo tiempo. El rodillo aireador (Figura 1) gira desde la posición inicial del centro del eje (o) en la dirección de avance (x) en una distancia (vt) a la posición final (o1). La punta de una cuchilla gira respecto al centro del eje desde la posición inicial (A) que coincide con el eje (x) en un lapso de tiempo (t) a la posición final (A1). Las proyecciones del centro del eje con la punta de la cuchilla a la inicial y al final del giro del rodillo aireador forman un ángulo, el cual incrementa desde cero en la posición inicial hasta (ωt) en la posición final.
Figura 1: Diagrama que describe el régimen cinemático del rodillo aireador (adaptado de Klenin, Popov y Sakun, 1985).

Figure 1: Diagram describing the kinematic regime of the aerator roller (adapted from Klenin, Popov and Sakun, 1985).
En la Figura 1 el significado de las literales es: v = velocidad de avance del rodillo aireador (m s-1), vt = desplazamiento en el eje x (m), ω = velocidad angular (rad s-1), ωt = ángulo que forman las proyecciones del centro del eje con la punta de la cuchilla entre la posición inicial y la posición final del giro (rad s-1), u =velocidad circular de la punta de la cuchilla (m s-1), R = radio del rodillo aireador (m), o = posición del centro del rodillo aireador al inicio del giro, cuyas coordenadas son 0,0 (m), o1 = posición del centro del rodillo aireador al final del giro, cuyas coordenadas son vt, 0 (m), A = posición de la punta de la cuchilla al inicio del giro, cuyas coordenadas son R, 0 (m), A1 = posición de la punta de la cuchilla al final del giro, cuyas coordenadas son X A , Y A (m), t = tiempo (s).
La trayectoria de la trocoide formada por las coordenadas de la punta de la cuchilla al pasar de (A) a (A1), se estableció con las ecuaciones paramétricas 1 y 2.
donde: X A = vector con las coordenadas longitudinales de la trayectoria de la trocoide (m), Y A = vector con las coordenadas verticales de la trayectoria de la trocoide (m).
A partir de la cinemática que presenta el rodillo al interactuar con el terreno, se establecen las coordenadas de la punta de la cuchilla (Figura 2).
Figura 2: Coordenadas de la punta de la cuchilla (adoptado de Klenin, Popov y Sakun, 1985).

El régimen cinemático ( y el calculo de la coordenada X A se estimaron con la Ecuación 3 y 4 respectivamente:
La distancia (L) recorrida por el rodillo en una revolución con radio R´ de referencia, se estimó con la Ecuación 5
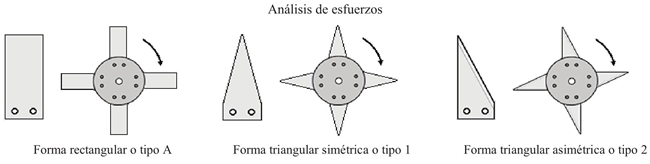
Se consideraron los siguientes parámetros de diseño: forma de las cuchillas: rectangular (tipo A), triangular simétrica (tipo 1) y triangular asimétrica (tipo 2), régimen cinemático (λ = 0.8, 1.0, 1.2), radio del rodillo aireador (R = 30 cm), espesor de las cuchillas (E = 1 cm), cantidad de cuchillas por cuerpo (n = 4) y profundidad del corte (a = 15 cm) (Figura 3).
El momento de inercia del elemento de corte, se calculó con la Ecuación 6 para la cuchilla tipo 1, y con la Ecuación 7 para la cuchilla tipo 2 (Timoshenko y Goodier, 2010).
donde: I xx = momento de inercia (kg m2), b = base o lado opuesta a la punta de la cuchilla (m), h = longitud de la cuchilla, r = radio de la cuchilla o distancia del centro del rodillo a la punta de la cuchilla (m).
El esfuerzo normal del elemento de corte, se calculó con la Ecuación 8 para la cuchilla tipo 1, y con la Ecuación 9 para la cuchilla tipo 2 (Timoshenko y Goodier, 2010).
donde: (x = esfuerzo normal (MPa), P = carga puntual aplicada (N).
La deflexión del eje neutro del elemento de corte, se calculó con la Ecuación 10 para la cuchilla tipo 1, y con la Ecuación 11 para la cuchilla tipo 2 (Timoshenko y Goodier, 2010).
donde: v = deflexión del eje neutro de la cuchilla (m), E = módulo de elasticidad del material de la cuchilla (GPa).
Con base en la Ley de Hooke, las deformaciones en cualquier parte del elemento de corte, se calculan con la Ecuación 12 para la cuchilla tipo 1 y con la Ecuación 13 para la cuchilla tipo 2 (Timoshenko y Goodier, 2010):
donde: ε x = deformación de la cuchilla (m), P = carga puntual aplicada (N).
Para la simulación cinemática de las trayectorias y áreas se utilizó el programa Geogebra (http://www.geogebra.org. 2014). Las áreas que cubren las herramientas de corte bajo el nivel del suelo en una revolución del rodillo aireador, fueron calculadas en AutoCad (http://www.autodesk.mx. 2014) (Figura 4, 5 y 6) Los esfuerzos normales de tensión y compresión, las deformaciones y la deflexión del eje neutro de los dos tipos de cuchillas utilizadas en el rodillo aireador se calcularon de forma numérica en Mathematica (http://www.wolfram.com, 2014), y fueron simulados por elemento finito en SolidWorks (http://www.solidworks.com, 2014). Se utilizó una carga puntual de 1000 N y un módulo de elasticidad de 200 GPa. Estos valores teóricos se propusieron considerando las características de algunos aceros comerciales que son utilizados para la manufactura de herramientas para labranza.

Resultados y Discusión
Se simularon cinemáticamente las trayectorias de las cuchillas utilizando el software Geogebra (http://www.geogebra.org. 2014). Se considero un régimen cinemático (Ecuación 3) de 0.8, 1.0 y 1.2. Se consideraron condiciones sin patinaje, sin deslizamiento y sin considerar fuerzas en contra del movimiento. El Cuadro 1 reporta las medias del suelo removido (m2 m-1) para los diferentes tipos de cuchillas y régimen cinemático.
Table 1: Amount of soil removed by type of blade and kinematic regime.
1 rev |
||||
adim |
m |
- - - - - - - - m22 m-1 - - - - - - - - |
||
0.8 |
2.36 |
0.0747 |
0.0477 |
0.0493 |
1.0 |
1.88 |
0.0598 |
0.0364 |
0.0371 |
1.2 |
1.57 |
0.0526 |
0.0320 |
0.0337 |
λ = régimen cinemático; Tipo A= cuchilla de forma rectangular; Tipo 1 = cuchilla de forma triangular simétrica; Tipo 2 = cuchilla de forma triangular asimétrica.
λ = kinematic regime; Type A = rectangular shaped blade; Type 1 = symmetrical triangular shaped blade; Type 2 = asymmetric triangular shaped blade.
Las cuchillas rectangulares a una profundidad de penetración de 0.15 m y régimen cinemático de 0.8 remueve el suelo en un 50%, es decir, la mitad de suelo quedó removido y la otra mitad no fue alterado. Al incrementar el régimen cinemático a la unidad, el suelo removido fue de 40% y en el régimen cinemático de 1.2, el suelo removido fue de 35%.
Las cuchillas triangulares simétricas a una profundidad de penetración de 0.15 m y régimen cinemático de 0.8 remueven el suelo en un 32%, es decir, un tercio de suelo quedó removido y dos tercios no fueron alterados. Al incrementar el régimen cinemático a la unidad, el suelo removido fue de 24% y en el régimen cinemático de 1.2, el suelo removido fue de 21%.
Las cuchillas triangulares asimétricas a una profundidad de penetración de 0.15 m y régimen cinemático de 0.8 remueven el suelo en un 33%, es decir, un tercio de suelo quedó removido y dos tercios no fueron alterados. Al incrementar el régimen cinemático a la unidad, el suelo removido fue de 25% y en el régimen cinemático de 1.2, el suelo removido fue de 22%.
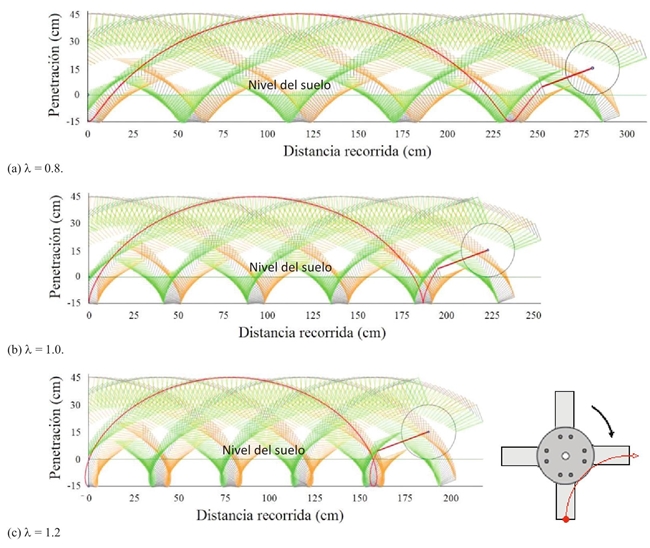
La Figura 4 presenta las trocoides de las cuchillas rectangulares para una revolución del rodillo.
La trayectoria en color rojo (Figura 4a-c) es la trocoide de un cuadrante del rodillo aireador, el cual coincide con la mitad de la punta de una cuchilla.
La Figura 5 presenta las trocoides de las cuchillas triangulares simétricas para una revolución del rodillo, asumiendo que no se presenta patinaje ni deslizamiento.
La trayectoria en color rojo (Figura 5a-c) es la trocoide de un cuadrante del rodillo aireador, el cual coincide con la punta de una cuchilla.
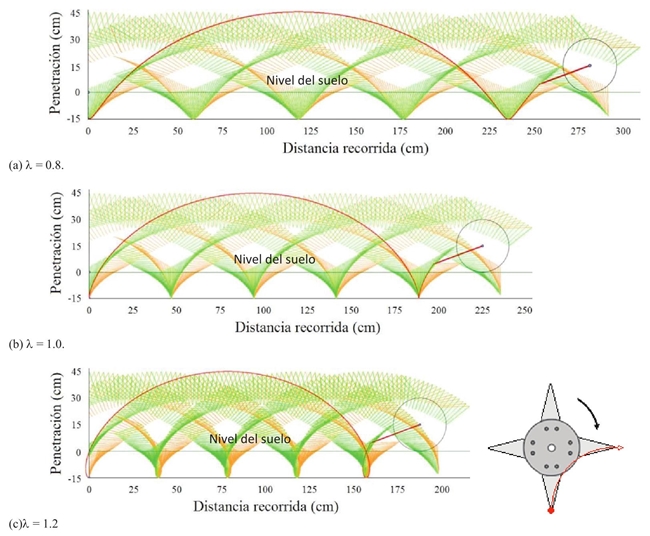
La Figura 6 presenta las trocoides de las cuchillas triangulares asimétricas para una revolución del rodillo, asumiendo que no se presenta patinaje ni deslizamiento.
La trayectoria en color rojo (Figura 6a-c) es la trocoide de un cuadrante del rodillo aireador, el cual se ubica al frente del giro de la punta de una cuchilla.
Con base en el análisis de Varianza de las medias del suelo removido y prueba de Tukey (Cuadro 2) realizado con el software SAS® versión académica, con nivel de significancia del 5% existen diferencias estadísticas entre la cantidad de suelo removido por las cuchillas del tipo A contra las cuchillas del tipo 1 y 2.
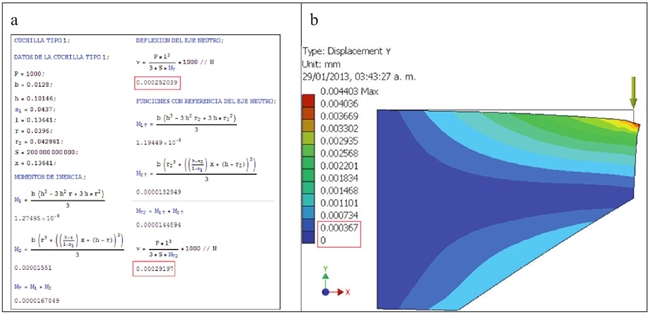
Considerando que la cuchilla tipo A, remueve una cantidad estadísticamente significativa respecto a las cuchillas de tipo 1 y 2, se descarta su análisis de esfuerzos debido a que la finalidad del rodillo aireador es de alterar lo menos posible al suelo. Los esfuerzos normales de la cuchilla tipo 1 calculados numéricamente fueron 4.52 MPa en la zona superior del elemento y -7.06 MPa en la zona inferior del mismo (Figura 7a). Los esfuerzos normales calculados por elemento finito, se encontraron en el rango de 3.66 a 6.52 MPa para la parte superior del elemento y -7.8 MPa para la parte inferior del mismo (Figura 7b).

El desplazamiento máximo del eje neutro de la cuchilla tipo 1 calculado numéricamente fue 0.29 mm (Figura 8a). El desplazamiento máximo calculado por elemento finito fue 0.367 mm (Figura 8b). Aun cuando la diferencia porcentual de los dos resultados es del 26%, la diferencia numérica es apenas de 75 μm (75/1000 mm), por lo que los dos resultados no presentan diferencia estadística significativa, y son confiables.
Para la cuchilla tipo 2 se obtuvo un esfuerzo normal de 8.83 MPa y una deformación de 44.16 μm (44/1000 mm) de forma numérica (Figura 9a). Los esfuerzos normales calculados por elemento finito se encontraron en el rango de 3.95 a 12.86 Mpa (Figura 9b).

La deflexión máxima del eje neutro de la cuchilla tipo 2 calculada numéricamente fue 1.43 mm (Figura 10a). El desplazamiento máximo calculado por elemento finito fue 1.48 mm (Figura 10b). La diferencia porcentual de los dos resultados fue 3% y la diferencia numérica fue 44 μm (44/1000 mm), por lo que los dos resultados no presentan diferencia estadística significativa, y son confiables.

En el Cuadro 3 presenta los resultados obtenidos de los esfuerzos y deformaciones de las cuchillas tipo 1 y tipo 2.
Los esfuerzos normales de tensión y de compresión en la cuchilla tipo 2 fueron iguales debido a la geometría simétrica, sin embargo, al cambiar la geometría a la forma asimétrica de la cuchilla tipo 1, el esfuerzo normal de tensión incrementó en 28% y el esfuerzo normal de compresión disminuyó en 18% respecto al esfuerzo normal de la cuchilla simétrica.
Table 3: Forces and deformations of the blades.
Cuchilla |
ET, σx |
EC, σx |
DT, εx |
DC, εx |
DEN, vx |
- - - - MPa - - - - |
- - - - - - - - mm - - - - - - - - |
||||
Tipo 1 |
4.52 |
7.06 |
2.26´10-7 |
3.53´10-7 |
2.52´10-4 |
Tipo 2 |
5.5 |
5.5 |
1.86´10-7 |
1.86´10-7 |
1.43´10-3 |
ET = esfuerzos normales de tensión; EC = esfuerzos normales de compresión; DT = deformaciones por tensión; DC = deformaciones por compresión; DEN = deflexión del eje neutro.
ET = normal tensile stresses; EC = normal compressive forces; DT = tensile deformations; DC = compression strains; DEN = deflection of the neutral axis.
Como los esfuerzos normales de tensión y de compresión en la cuchilla simétrica fueron iguales, las deformaciones de la cuchilla también fueron iguales en el lado de aplicación de la carga y en el otro. En las cuchillas asimétricas (tipo 1) aun cuando las deformaciones en los lados de la cuchilla sometidos a tensión y compresión fueron diferentes, la diferencia fue apenas de 167 nm (167/1 000 000 mm).
La deflexión del eje neutro del elemento fue mayor en la cuchilla simétrica en casi cinco veces al desplazamiento de la cuchilla asimétrica, con una diferencia numérica de 1.18 mm. Debido a la deflexión que presentó, la cuchilla tipo 1 es mejor para considerarla en la manufactura del rodillo aireador, por mostrar mayor rigidez la cuchilla tipo 2, considerando el mismo material en ambos, no se recomienda puesto que es más susceptible a la fatiga en condiciones cíclicas de operación y en suelos compactados.
Conclusiones
Con base en el análisis de esfuerzos, a medida que la compactación del suelo vaya en aumento se puede optar por cambiar cuchillas rectas (λ = 0.8 hasta λ = 1.2), a cuchillas triangulares (λ = 0.8 hasta λ = 1.0). El área de suelo removido incrementa al disminuir el régimen cinemático, y la función del rodillo es hacer una cavidad en el suelo para incrementar la aireación y la capacidad de retención del agua de lluvia, en este sentido se recomienda utilizar un régimen cinemático menor a la unidad. No se recomienda construir cuchillas del tipo A, puesto que la cantidad de suelo que será removido es estadísticamente significante con respecto a las cuchillas de tipo 1 y 2. Las cuchillas tipo 1 presentaron diferencias en los esfuerzos normales de tensión y compresión, por lo cual también mostraron diferentes deformaciones en el lado de aplicación de la carga y en el lado opuesto, lo cual incrementó el desplazamiento o deflexión del eje neutro. Considerando los indicadores de esfuerzo-deformación que presentó la cuchilla tipo 1, se recomienda su manufactura ya que cumple con los requerimientos de resistencia y deflexión para hacer frente a las condiciones de no homogeneidad del suelo. La cuchilla tipo 2 presentó una mayor rigidez, lo cual la hace más susceptible a la fatiga o incluso a rupturas en condiciones cíclicas de operación y en suelos compactados.
Disponibilidad de Datos
Todos los datos generados o analizados durante este estudio se incluyen en este artículo publicado.
Contribución de los Autores
Conceptualización: J.A.Y., M.Á.P.P. y E.R. Metodología: J.A.Y, M.Á.P.P. y Á.M.M. Software: J.A.Y. y M.Á.P.P. Validación: J.A.Y y E.R. Análisis formal: M.Á.P.P. y J.A.Y. Escritura: preparación del borrador original: J.A.Y y Alvaro Morelos. Escritura: revisión y edición: J.A.Y, E.R. y A.M. Visualización: M.Á.P.P. y J.A.Y. Supervisión: E.R. Administración del proyecto: E.R. Adquisición de fondos: E.R.

