











 nova página do texto(beta)
nova página do texto(beta) Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por email Citado por SciELO
Citado por SciELO  Similares em
SciELO
Similares em
SciELO 
 Permalink
PermalinkIntroducción
Hoy en día los cultivos expuestos a la intemperie han tenido menor producción que aquellos cultivados mediante la implementación de tecnologías y sistemas específicos, que aceleran la producción y mejoran la calidad del producto al tener un entorno regulado (Campos y Llanderal, 2003).
Al no contar con un ambiente controlado, se afecta directamente a los productores ya que en muchos casos se limitan a la producción de un solo cultivo o un solo ciclo, reduciendo la competitividad y sin remunerar la inversión. Los aportes de las ciencias computacionales pueden orientarse al cuidado de cultivos por medio de programación de labores automáticas y observación o revisión continua del desarrollo del cultivo con el fin de mejorar la producción y calidad de las cosechas (Rodríguez y Santana, 2015).
El sistema de biorreactores de inmersión temporal (SIT), es una técnica que se ha empleado para la micro propagación de varias especies agrícolas y forestales (Etienne, et al., 1997). También se tienen grandes ventajas al disminuir la manipulación manual intensiva (Ziv, 2005), incrementar la tasa de proliferación reducir costos de producción (Preil, 2005) y mejorar la calidad del material vegetal (Etienne y Berthouly, 2002), incluyendo la clonación de especies difíciles de propagar o aquellas que están en peligro de extinción. Los cultivos pueden ser iniciados a partir de varias porciones de tejido vegetal, por ejemplo de una hoja pueden regenerarse embriones somáticos o brotes adventicios (Arellano et al., 2011; Mallón et al., 2011) que para mantener su multiplicación se requiere del control del medio de cultivo, así como del fotoperiodo la calidad de la luz y la temperatura de forma continua y periódica durante el día y la noche, desde el inicio de su desarrollo hasta que son capaces de sobrevivir en condiciones de invernaderos (Santos et al., 2011).
Un SIT se compone de frascos (biorreactores), con dos compartimentos, uno superior donde crecen los explantes y otro en la parte inferior, donde se coloca el medio de cultivo líquido (Etiene y Bertouli, 2002). A este sistema se le aplica un flujo de aire a presión por medio de un compresor que hace que suba el medio de cultivo líquido y lo pone en contacto con los explantes por tiempos intermitentes. Después de que cesa la inyección de aire el medio de cultivo desciende por gravedad. Este sistema provoca cambios en la atmósfera interna del frasco, trayendo consigo un mayor crecimiento y desarrollo del cultivo, además de que se mantiene una capa superficial de medio de cultivo hasta la próxima inmersión (Maldonado et al., 2003).
La automatización de un SIT y sus efectos en cuanto a mejora y aumento de producción agrícola, tiene una relación directa con el desarrollo sustentable al contribuir con la conservación de hábitats naturales mediante la propagación de especies amenazadas o en peligro de extinción. Hoy en día existen aplicaciones y mecanismos que interfieren en el control del SIT, por ejemplo se ha empleado electroválvulas conectadas a un compresor con encendido automático y mangueras de silicón que llegan hasta el fondo del biorreactor; controlando su activación un temporizador programable para determinar la frecuencia y duración de la inmersión (Santos et al., 2011). Se han usado técnicas para regular la temperatura o el suministro de nutrientes al biorreactor, para mejorar el crecimiento y la multiplicación de los explantes. Cabe mencionar que el uso, control y manejo de estos elementos es complicado y requiere de la preparación del personal, así como de su supervisión constante para mejorar y aumentar la producción vegetal.
Existen alternativas de control, por ejemplo, un PLC (del inglés, Programmable Logic Controller), se enfoca al control de eventos o procesos en tiempo real, sin embargo, debe ser programado con un software especializado, e incluye dispositivos de alto costo o difíciles de conseguir (Vallejo, 2005). El PLC acorde a las necesidades del proyecto es el modelo ELC‑PA10AADR que tiene un costo actual de $ 10 800.00 MN1. Otra alternativa de automatización son los FPGA (del inglés, Field Programmable Gate Array), dispositivos versátiles de fácil programación y capaces de realizar funciones lógicas (Castillo et al., 2008); sin embargo, contienen componentes agregados que no son útiles para proyectos sencillos, creando un desperdicio de recursos que impedirían un diseño óptimo del circuito. Un FPGA acorde a las necesidades del proyecto tiene un costo promedio actual de $ 3530.52 MN2, sin contar los sensores y actuadores.
El objetivo de la propuesta expuesta en el presente artículo es el uso de plataformas abiertas de hardware y software, ya que la modificación de componentes acorde a las necesidades de cada proyecto genera una disminución de costos y optimiza de los recursos humanos y financieros.
Materiales y Métodos
Hardware del sistema
Está compuesto por tres elementos principales: 1) sensores, 2) actuadores y 3) placas electrónicas de plataforma abierta junto con shields (placas electrónicas que agregan una funcionalidad específica al sistema).
1. Los sensores que se utilizaron fueron: DS18B20: Sensor de temperatura digital creado por Dallas Semiconductor de tres terminales (5V, datos y tierra), no requiere componentes externos, se alimenta con 3V a 5.5V y captura una temperatura de -55 °C hasta 125 °C (Maxim Integrated, 2015); fotorresistencia: componente electrónico, el cual varía su resistencia conforme aumenta o disminuye la intensidad de la luz. La radiación óptica aporta la energía necesaria para incrementar el número de electrones libres, disminuyendo así la resistividad.
-
2. Actuadores utilizados: a) Relevador: componente electromecánico que funciona como interruptor para activar diversos aparatos a partir de una señal eléctrica; con una capacidad de 10A.
Y b) Electroválvulas: componentes electrónicos que permiten el paso de líquido o aire, siendo activados por un mecanismo (en este caso relevadores); con el fin de regar o realizar inmersiones en cultivos (Ritter et al., 2009).
3. Control electrónico: Se utilizaron 2 placas Arduino Uno (una para el sistema en el SIT y otro para el control remoto), la elección se basó en la versatilidad, bajo costo, facilidad de uso y alta potencia que ofrece la plataforma de código abierto; posee un controlador ATMega con 6 entradas analógicas y 14 digitales, además cuenta con comunicación serial por USB y es compatible con una gran gama de placas prefabricadas (Martínez et al., 2009).
Sistema de comunicación remota
Se implementó una shield GSM Icomsat v 1.1, que es una placa compatible con Arduino, capaz de enviar mensajes de texto a partir de un chip de alguna compañía telefónica celular; trabaja con 4.5V hasta 5.5V suministrado por Arduino y es necesario programarse para determinar los envíos de mensajes y el procesamiento de los datos entrantes (Padilla et al., 2015).
Software del sistema
Se utilizó el lenguaje Java con el paradigma orientado a objetos. Su principal característica consiste en que es un lenguaje compilado e interpretado, ya que todo programa Java se compila y el código que se genera es interpretado por una máquina virtual, de manera que logra la independencia de la misma (Arnow, 2000). El lenguaje Java ofrece una serie de posibilidades de desarrollo de software, minimizando los errores y maximizando la eficiencia del mismo (Arnow, 2000).
Para el desarrollo del software se utilizaron entornos de desarrollo integrado (por sus siglas en inglés IDE) que se listan a continuación:
a) NetBeans IDE: entorno de desarrollo creado por Sun Microsystems® en la que se puede escribir, compilar, depurar y ejecutar programas escritos en el lenguaje de programación Java, el cual es un producto bajo la licencia de código abierto GPLv2 (Bain, 2009).
b) Arduino IDE: Las siglas IDE vienen de Integrated Development Environment, lo que traducido a nuestro idioma significa Entorno de Desarrollo Integrado. Esto es simplemente una forma de llamar al conjunto de herramientas software que permite a los programadores poder desarrollar (escribir y probar) sus propios programas con comodidad (Torrente, 2013). Es software libre y de uso sin restricciones que pude ser descargado desde la página oficial del dispositivo3 para distintos sistemas operativos.
c) Android Studio IDE: herramienta oficial de Google para el desarrollo de aplicaciones Android, provee de diferentes clases que permiten al acceso de funcionalidades específicas de la red móvil como el GPS, GSM, gestión de archivos, entre otras. Es de descarga gratuita y uso libre, además de contar con las últimas actualizaciones de las versiones del sistema operativo móvil.
Desarrollo del hardware
Se empleó el uso de la metodología Bottom UP, donde las partes individuales se diseñaron con detalle y luego se enlazaron para formar componentes más grandes, que a su vez se enlazaron hasta que se formó el sistema completo (Masi, 2008). Una de las peculiaridades del trabajo con esta metodología es la cuestión del ensayo y error para la mejora del producto, lo que implica que el desarrollo a partir de una idea principal y su posterior mejora permite enfrentar el hardware y software elaborados a situaciones y problemáticas reales, por lo que es posible concluir el proyecto y reparar o solucionar los conflictos que surgen durante su desarrollo (Berón, 2006). El diagrama de la metodología se presenta en la Figura 1.

Para el desarrollo del software, se empleó el uso de la metodología Kanban, que consiste en la implementación de un modo de trabajo eficiente y efectivo, al tener en cuenta la producción y logística en todo momento, de manera que es posible lograr el desarrollo de un plan de trabajo específico que permita el desarrollo del objetivo de manera óptima.
Cumplir con estas reglas permite una adecuada gestión de recursos humanos, materiales e intelectuales, así como la organización del plan de trabajo, lo que conlleva a un trabajo bien logrado (Núñez, 2002).
Resultados y Discusión
Para el desarrollo del sistema se crearon diversos módulos en el que cada uno realiza una acción en la automatización, a continuación, la Figura 2 muestra un diagrama general de funcionamiento y se describen a detalle los módulos que se desarrollaron.

Hardware
La placa Arduino realiza la función de interpretación de señales que provienen de los sensores y genera señales de control hacia los relevadores para activar dispositivos de potencia, en este caso, bombas de aire. La PC (del inglés Personal Computer) tiene la función de mostrar interfaces del usuario para que pueda configurar parámetros y umbrales de acción. Toda la información se almacena en una base de datos para poder realizar consultas de los datos que se requieran. El Shield GSM envía y recibe mensajes cortos de texto (SMS) hacia y desde dispositivos móviles, ya sea para avisar acciones emprendidas por el sistema o recibir comandos remotos. Se realizó una aplicación móvil para el sistema operativo Android con la capacidad de interceptar los mensajes de texto que llegan al móvil y de esta manera, interpretar la información y mostrarla en interfaces de usuario agradables al usuario.
La integración de los módulos del hardware del sistema se muestra en la Figura 3.
Software
Para la configuración flexible de los horarios, se desarrolló una interfaz de usuario en lenguaje Java (Figura 4), fácil de usar donde se ingresa de forma manual los horarios para los bombeos, también se despliega la información necesaria de los sensores que monitorean al SIT, así como las advertencias que aparecerán en la pantalla en caso de una incorrecta temperatura o iluminación.

Almacenamiento de la información
Para el manejo de la información referente a los horarios, la duración de activación en los relevadores, los registros de temperatura y los de las fotorresistencias, fue necesario implementar una base de datos en la que se pudiera guardar, modificar y eliminar información a petición del usuario. Para el presente proyecto de investigación se decidió crear una base de datos con el gestor SQLite ya que este presenta ventajas como lo es su portabilidad y el poco espacio de almacenamiento que se requiere para su instalación.
Los cuadros que contiene la base de datos son:
1) Usuario: proporciona al sistema un crecimiento futuro para adaptarlo a sistemas multiusuario, donde varias personas puedan controlar un mismo SIT.
2) Temperatura: el valor es constante en la habitación o laboratorio y sólo se lleva un registro histórico.
3) Iluminación: registra la hora y sector para cada aplicación de luz.
4) Sector: identifica al módulo que contiene el conjunto de biorreactores.
5) Historial de iluminación: sirve para almacenar los valores históricos de iluminación.
6) Bombeo: registra la hora, sector, duración para cada aplicación del bombeo de nutrientes.
7) Historial de bombeos: almacenar los valores históricos de aplicación de nutrientes.
8) Advertencia foto: almacena las alarmas o advertencias que genera el sistema cada vez que se detecta un cambio en las fotorresistencias, es decir, cada vez que se activa o desactiva la luz para algún sector en particular.
El diagrama de entidades que contiene la base de datos se muestra en la Figura 5.

Aplicación móvil
En la Figura 6-A se muestra la interfaz de la aplicación para dispositivos móviles Android cuando es iniciada y no posee ningún dato de información; en la Figura 6-B se presenta la ventana principal con los datos obtenidos de la petición enviada con los botones de la Figura 6-C. Por último, la Figura 6-D se muestra una notificación especial que realiza la aplicación cuando tras una petición de información, el SIT no regresa dato alguno en un tiempo de 5 min; de esta manera, se tiene el aviso de que existe un problema con la comunicación o un fallo en el sistema de inmersión.

Prototipo final
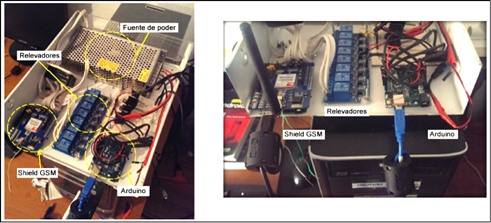
Después de integrar todos los elementos del sistema, el prototipo fue sometido a pruebas de funcionamiento, realizando bombeos calendarizados. Se monitorearon los valores obtenidos por el sensor de temperatura y de las fotorresistencias, confirmando su configuración y funcionamiento. En la Figura 7 se muestra el sistema de automatización implementado.

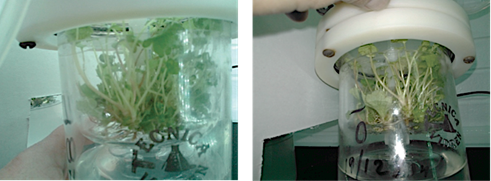
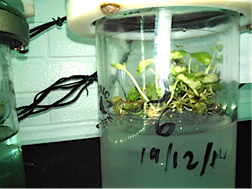
Después de un mes de prueba se obtuvieron los siguientes resultados: el biorreactor del sistema automatizado (Figura 8), presentó 131 brotes a partir de 10 explantes del cultivo de lináloe4; por otro lado, el biorreactor del sistema sin automatizar o tradicional (Figura 9) no logró un desarrollo similar, siendo evidente que el número de brotes es menor al biorreactor en la automatización.
Con base en los resultados obtenidos, se puede concluir que se logró optimizar el desarrollo de los brotes, al proporcionar homogeneizar los eventos de inmersión y del control del manejo del tipo de luz, lo que logró, mejores condiciones para conseguir un mayor número de brotes y de mejor calidad. Sin embargo, es necesario continuar realizando las evaluaciones para determinar en otras especies la influencia del sistema automatizado en la cantidad y calidad de la producción frente a un sistema tradicional.
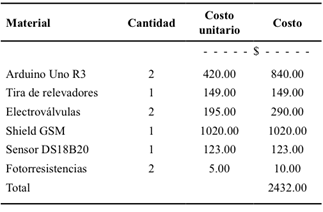
Costos
Uno de los objetivos del prototipo es la disminución de costos por lo que a continuación, en el Cuadro 1 se presentan los costos necesarios para la implementación del prototipo.
Conclusiones
- Los dos componentes principales usados Arduino y la plataforma de software java; permitió desarrollar un sistema de automatización que aumenta las prestaciones frente a sistemas comerciales, mediante la reconfiguración por software de rutinas para la aplicación de nutrientes, monitoreo constante y control a distancia del sistema; además de la reducción de costos. Es posible agregar módulos de hardware (como sensores o actuadores) y módulos de software (lógica de control) de manera sencilla.
- El prototipo permite la configuración en la aplicación de tratamientos con lo que pueden llevarse a cabo diferentes experimentos de forma paralela para establecer los parámetros óptimos para el crecimiento de las especies propagadas en el sistema de inmersión temporal.
- La inclusión de dispositivos móviles permite el control y monitoreo a distancia del sistema; dado que los mensajes SMS permiten enviar y recibir datos con un costo relativamente bajo, es posible adaptar el sistema para enviar datos a través de internet para disminuir aún más los costos.

