











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Para la aplicación correcta de la tecnología de agricultura de precisión (AP) se requiere de información puntual acerca de las propiedades del suelo para conocer en qué medida éstas satisfacen las necesidades específicas del cultivo y a partir de ello optimizar la aplicación de insumos. La AP está basada en la existencia de la variabilidad edáfica lo cual requiere de la aplicación de distintas áreas de tecnología para estimar y evaluar dichas variaciones tales como un Sistema de Posición Global (GPS), sensores remotos y locales, así como Sistemas de Información Geográfica (SIG) (Zhang et al.,2002).
La AP está siendo ampliamente difundida, incrementando el interés en el uso de sensores para la obtención de información de las variables del suelo y de los cultivos. Muchos de estos sensores están acoplados a un GPS, para obtener los mapas de las diferentes variables (Andrade et al., 2004). Los datos obtenidos y procesados con SIG son la base para determinar la variabilidad de las propiedades físicas, químicas y biológicas de los suelos agrícolas. Mediante el uso de técnicas geo-estadísticas, la variabilidad espacial de los parámetros del suelo puede ser evaluada, lo que facilita una gestión regionalizada, siguiendo los objetivos de la agricultura de precisión, por ejemplo, la realización de operaciones de labranza de acuerdo con esta variabilidad espacial (Paz et al., 2000).
El estudio de la variabilidad de las propiedades físicas, químicas y biológicas del suelo tiene un papel importante en la cuantificación de las necesidades de laboreo del suelo, en función de los requerimientos de desarrollo del cultivo. La resistencia a la penetración (RP) es un parámetro directamente relacionado con la compactación, que es resultado del aumento en densidad y disminución de la porosidad lo que implica un deterioro de la estructura que limita el crecimiento de las plantas y el rendimiento del cultivo (Dexter et al., 2007). Por lo anterior, es de suma importancia cuantificar y georreferenciar el valor de la RP en el terreno. La característica mecánica del suelo como la RP proporciona información útil sobre la ubicación en espacio y profundidad de capas compactadas del suelo. Los suelos compactados reducen las tasas de crecimiento de las raíces de los cultivos y así limitan la disponibilidad de agua y nutrientes a la planta (Upadhyaya et al., 1999). La detección precisa de la RP del suelo y la ubicación de capas duras es un paso importante para la aplicación con éxito de la Labranza de Precisión. Se están desarrollando tecnologías para la medición de la RP del suelo en tiempo real para identificar las capas duras para apoyar el desarrollo de la Labranza de Sitio Específico. Algunos investigadores han llevado a cabo estudios para la medición del perfil de la compactación del suelo utilizando dispositivos diseñados para funcionar de una manera similar a una herramienta de labranza. Glancey et al. (1989) y Adamchuk et al. (2001) desarrollaron vigas en voladizo instrumentadas con galgas extensiométricas para medir la distribución de la fuerza de corte del suelo en la viga. Como aplicación práctica, penetrómetros horizontales han sido desarrollados y empleados para la caracterización de la distribución de la resistencia mecánica del suelo a diferentes profundidades (Sirjacobs et al., 2002; Andrade et al., 2007).
El penetrómetro de cono, es un dispositivo que mide la fuerza requerida para empujar un cono de metal verticalmente dentro del suelo (ASAE, 2002a). Los penetrómetros son ampliamente utilizados para medir la resistencia del suelo a la penetración, expresado como la fuerza por unidad de área de sección transversal de la base del cono (Bengough et al., 2001). El penetrómetro de cono ha sido automatizado y modificado para incrementar la tasa de adquisición de datos y evaluado para producir mapas de la resistencia del suelo (Clark, 1999; Raper et al., 1999; Price, 2002). Varios autores han desarrollado un sistema de penetrómetro basado en Sistemas de Posicionamiento Global Diferencial (DGPS) montado sobre el tractor utilizado para cuantificar la resistencia del suelo a la penetración de manera georreferenciada (Khalilian et al., 2002; Boon et al., 2005).
En la última década, la integración de sensores con los Sistemas de Navegación Global por Satélite (GNSS) han permitido obtener mediciones en tiempo real con una precisión de su ubicación de centímetros y han mejorado significativamente el volumen y la precisión espacial de los datos necesarios para la AP (Wilson, 2000; Pérez et al., 2011). Los receptores GNSS son las tecnologías fundamentales de la AP donde la información de la posición es un requisito para la aplicación de tecnologías para el manejo del cultivo de sitio específico, tales como: el monitoreo de rendimiento, muestreos de suelo o aplicación variable de insumos, las cuales se llevan a cabo con suficiente precisión con los sistemas diferenciales (DGPS) y sistemas de corrección de posición tiempo real (RTK-GPS).
La adquisición de equipos de agricultura de precisión es un tema de gran importancia en las zonas de alta productividad agrícola en México. En la actualidad se cuenta en forma limitada con equipos para determinar los requerimientos a nivel espacial de propiedades físicas del suelo para optimizar la producción agrícola en los componentes de siembra, fertilización y control de plagas y enfermedades. Similar situación se presenta en la labranza, en donde no se conocen en México registros de contribuciones científicas en el manejo variable de laboreo del suelo. Por lo anterior, se requiere disponer de sistemas integrados o dispositivos electrónicos para la generación de mapas de diagnóstico de las propiedades físicas, químicas y biológicas de suelos agrícolas y su interacción con los mapas de rendimiento, que permitan la elaboración de mapas de prescripción de aplicaciones de insumos entre los que destacan la aplicación de energía diferenciada en el laboreo primario del suelo.
Debido a que la compactación (que puede ser ubicada por la RP del suelo) es uno de los factores limitantes en el rendimiento de la producción agrícola y que el uso de la labranza para su adecuada corrección representa altos consumos de energía al tratar el suelo como si el problema fuese homogéneo. El propósito de la presente investigación fue el desarrollo de un sistema para la medición de la resistencia a la penetración del suelo, el cual dispone de sensores para la medición de fuerza y profundidad de RP integrados con tecnología GPS-RTK, con la finalidad de generar mapas de diagnóstico de alta precisión de la geo-localización de capas compactadas de suelo. El presente trabajo antecede a la investigación del desarrollo de tecnología de laboreo variable automático el cual usará como principal insumo los mapas de diagnóstico de capas compactadas de sitio específico.
Materiales y métodos
El desarrollo tecnológico se realizó del periodo 2010 al 2014, en las instalaciones del laboratorio de mecánica-electrónica del departamento de maquinaria agrícola de la Universidad Autónoma Agraria Antonio Narro.
Para esta investigación se diseñó y construyó un carro porta sensores con acoplamiento al enganche de los tres puntos del tractor (Figura 1). La construcción del diseño desarrollado del carro porta sensores se llevó a cabo en las instalaciones del Centro de Investigación y Desarrollo de Aguascalientes (CIDEA), de la empresa TECNOMEC AGRÍCOLA S.A. de C.V. en Aguascalientes, México. El carro cuenta con un actuador hidráulico para controlar la altura de la doble barra donde se pueden montar sensores para la medición de las propiedades físicas del suelo entre ellas la resistencia a la penetración. Los componentes que integran el penetrómetro son dos sensores: el primer sensor para la medición de fuerza de RP, para el cual se empleó el método desarrollado por Campos y Wills (1995), para diseñar un sensor de fuerzas tipo anillo simple con capacidad de 10 kN. El acero empleado en la construcción del transductor fue un 1020 (AISI) con un esfuerzo límite de cedencia de 380 MPa. Las galgas extensiométricas utilizadas fueron de 350 Ω tipo KFG-5-350-C1-11 de la marca Kyowa con un factor de galga de 2.11, en un arreglo de puente de Wheatstone completo. La colocación de las galgas en el anillo fue en la parte interior y exterior, empleando para su montaje el procedimiento descrito por Sakurai (1996). Para su operación, este sensor de anillo simple se acopla en su extremo superior el vástago del actuador hidráulico y en su extremo inferior el penetrómetro con una punta cónica de 20.27 mm de base y ángulo de 30° (Norma ASAE S313.3, 2002a). El segundo sensor para medición de profundidad de penetración fue seleccionado para mediciones en un rango de 30 a 600 mm y está integrado por un sensor de distancia LV-MaxSonar-EZ1 de la empresa MaxBotix, dos amplificadores de instrumentación en serie AD620AN y un filtro pasa-baja Resistivo-Capacitivo (RC). Esta combinación de circuitos integrados acondicionan las señales para un porcentaje menor al 2% de ruido magnético al realizar el registro de datos en el sistema de adquisición Daqbook 2000. La velocidad de penetración fue de 30 mms-1 (Norma ASAE EP542, 2002b).

La calibración del sensor de fuerza se realizó aplicando pesos conocidos para la obtención de la constante de proporción entre la carga aplicada y el voltaje de salida. De manera similar la calibración del sensor de profundidad se realizó en un rango de trabajo de 30 a 500 mm, desplazando el sonar con respecto a la posición fija de una placa reflectora del sonido a intervalos de 50 mm, esto para la obtención de la constante de proporción entre la distancia y el voltaje de salida. Para ambas calibraciones se empleó el sistema de adquisición de datos Daqbooq 2000 además del acondicionador de señales DBK43A y el programa DaqView 9.1.27 para el registro de la información a una frecuencia de muestreo de 20 Hz. La generación de la ecuación de calibración, se realizó con una regresión lineal empleando el programa Minitab V16.
Para la determinación de la RP en campo, se utilizó un tractor acondicionado, que permitió las facilidades de conectividad y acoplamiento de los equipos de seguimiento y registro de la información. La instrumentación en el tractor incluyó los siguientes equipos: un convertidor analógico-digital Daqbook2000, un acondicionador de voltaje modelo DBK43a y un controlador AgGPSFMX marca Trimble.
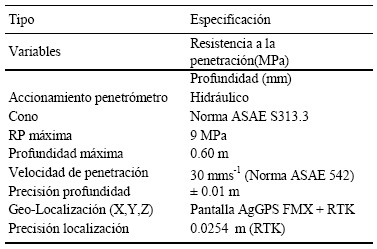
Las evaluaciones en campo del sistema desarrollado para la determinación de la (RP) geo-referenciada se realizaron en el campo experimental Navidad, perteneciente a la Universidad Autónoma Agraria Antonio Narro, ubicado en el estado de Nuevo León, México. Con coordenadas 25° 01' 50.88" N, 100° 37' 35.65" O, y altitud de 1884 m. La textura del suelo de evaluación fue migajón con contenidos medios de 42% arena, 36% limo y 22% de arcilla, con humedad promedio del 15% y densidad aparente de 1.07 Mg m-3. El equipo utilizado para georreferenciación de la variable de muestreo fue la pantalla integrada AgGPSFMX, adicionalmente se utilizó la señal de corrección RTK, para obtener posiciones con un grado de error inferior a 0.0254 m, en el Cuadro 1 se observan las especificaciones del penetrómetro.
Las profundidades de evaluación fueron de 0.20, 0.30 y 0.40 m donde se determinó la media, mediana, máximo, mínimo y coeficiente de variación (CV). Para la clasificación de la variabilidad del parámetro muestreado, se tomó el criterio de Warrick y Nielsen (1980) donde la variabilidad baja para CV menores de 12%, variabilidad media entre 12 y 60% y variabilidad alta para CV mayores a 60%. Posteriormente al muestreo, se realizó la interpolación con el método Ponderación de la Distancia Inversa (IDW) para la superficie total y se generaron los mapas de resistencia a la penetración para cada una de las profundidades evaluadas empleando el Sistema de Información Geográfica (SIG) GS+ V5.1.
Resultados y discusión
Las pruebas de laboratorio mostraron que el desarrollo del sensor de RP presentó alta confiabilidad en la respuesta a la detección de fuerzas conocidas. En la Figura 2 se observan los resultados de la calibración del transductor de anillo simple con una sensibilidad de 13.15 Nm V-1 y un coeficiente de correlación de 99.6% entre la fuerza aplicada y el voltaje de salida. Resultados similares fueron reportados por Sun et al. (2006) y Laffita et al. (2012), para la calibración estática de una celda de carga para medición continua de RP y de un transductor tipo "S", respectivamente, aplicando valores de pesos conocidos.

Los resultados de calibración del sensor de profundidad con una sensibilidad de 258.5 mm V-1 y un coeficiente de correlación de 100% entre la profundidad de penetración y la salida de voltaje se observan en la Figura 3.

En la Figura 1 se muestra el carro porta sensores con los dos diferentes aditamentos para el muestreo de la fuerza y la profundidad de la RP, así como el actuador del hidráulico del penetrómetro.
La validación en campo del sistema de monitoreo de resistencia a la penetración se llevó a cabo con muestreo sistemático de 30 puntos a partir de una muestra simple distribuidos en forma equidistante en superficie de una hectárea, con lecturas continuas de RP de 0-400 mm de profundidad, controlada por una válvula reguladora de flujo y el sistema hidráulico del tractor. El desempeño del equipo presentó adecuada funcionabilidad de los componentes mecánicos y electrónicos, con una alta precisión de muestreo para la fuerza y profundidad. La configuración del carro porta sensores para la medición de resistencia a la penetración en campo se muestra en la Figura 4, donde se aprecia además del carro, la antena de corrección de posición satelital RTK.
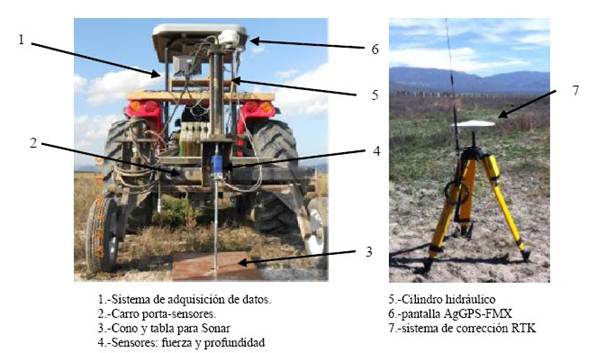
Figura 4 Carro porta sensores y componentes del sistema de muestreo para la medición de (RP) en campo.
Las gráficas de los muestreos continuos obtenidos con el sensor de fuerza y profundidad respectivamente para la obtención de la RP bajo condiciones de campo se muestran en la Figura 5 y 6.


La estabilidad del monitoreo de los primeros 500 datos cuando la sonda aún no ha penetrado en el suelo se pueden observar en la Figura 5 y 6 sección (a); en la sección (b) la sonda ya penetró en el suelo y manda las señales de la RP y la profundidad al sistema de adquisición de datos. En la sección (c) las señales del sonar y del penetrómetro se estabilizan ya que la sonda ha dejado de penetrar el suelo; esto es ocasionado por dos causas: la primera es cuando el carro-porta sensores es levantado por la resistencia del suelo a ser penetrado (capas compactadas) y que supera el esfuerzo normal transmitido por el carro al suelo (9 MPa) y el penetrómetro no alcanzó los 0.40 m de profundidad y la segunda causa, es que se alcanzó la profundidad deseada y es detenido el muestreo de datos.
Se observa en la Figura 7 el resultado de la medición de la resistencia a la penetración contra profundidad, realizada con el penetrómetro integrado por ambos sensores. Se observa una respuesta nítida, en la medición de datos obtenidos en campo.

Las magnitudes de la RP oscilaron en un rango de 0.644 y 3.96 MPa, de la superficie del suelo hasta 0.40 m de profundidad. A partir de la base de datos de las variables de posición (latitud, longitud y sensor de profundidad), se utilizó el método de interpolación IDW, para la generación de los mapas a tres profundidades distintas (0.20, 0.30 y 0.40 m).
Los resultados obtenidos de resistencia a la penetración a la profundidad de 0.20 m, con rangos que van desde 0.644 hasta 1.656 MPa se observan en la Figura 8a. En la Figura 8b se observan los resultados obtenidos a la profundidad de 0.30 m, con rangos que van desde 1.30 hasta 2.35 MPa. En la Figura 8c se observan los resultados obtenidos a la profundidad de 0.40 m, con rangos que van desde 1.710 hasta 3.960 Mpa. Taylor y Gardner (1963), Atwell (1993), Silva y Kay (1996), Raper et al. (2005a), encontraron que con RP superiores a 2 MPa, se reduce significativamente el crecimiento de las raíces de la mayoría de las especies cultivadas. Esto nos indica, que para todos los valores medidos con el penetrómetro que excedan el valor de 2 MPa a la profundidad de muestreo registrada, deberán ser labrados para evitar un efecto negativo en el rendimiento.
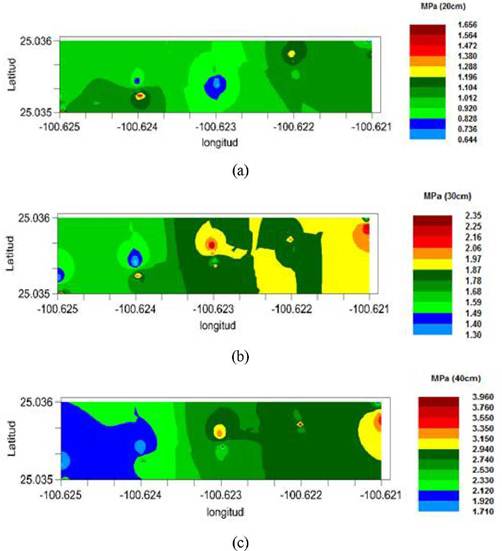
Figura 8 Mapas dela resistencia a la penetración del suelo (MPa) a profundidades de 0.20, 0.30 y 0.40 m.
El resultado de los valores de RP para las 3 profundidades monitoreadas y la clasificación de la variabilidad tomando el coeficiente de variación de la media de los datos, de acuerdo al criterio de Warrick y Nielsen (1980) se observa en el Cuadro 2.

C.V. = coeficient de variación; D. S. = desviación estándar.
Cuadro 2 Datos de 30 puntos de muestreo de RP para la clasificación de la variabilidad.
De acuerdo al resultado del coeficiente de variación de la variable RP, para las tres profundidades, la variabilidad se clasifica como variabilidad media, ya que los valores se encuentran dentro del rango de 12 a 60%. Los resultados de la generación de mapas de diagnóstico, demostraron que es posible determinar áreas de capas compactadas del suelo a partir de un muestreo con alta precisión. El uso del penetrómetro equipado con GPS-RTK, más la adición del sensor de profundidad otorga precisión vertical milimétrica. Resultados similares fueron encontrados por Clark (1999), Raper et al. (2005b) reportando que la profundidad de la capa dura era completamente variable, en todo el terreno desde 10 a 25 cm. Con base en los mapas de diagnóstico obtenidos e identificando capas compactadas superiores a 2 MPa, se requiere que 50% se laboree a 0.20 m, 30% a 0.30 m y el restante 20% a 0.40 m.
Una aplicación potencial del uso de este desarrollo y su análisis, es la identificación y localización de capas compactadas con alta precisión para su posterior manejo como labranza de sitio específico o aplicación de laboreo variable.
Conclusiones
El equipo desarrollado permite la medición de la magnitud, profundidad y geolocalización de las capas compactadas del suelo, con una precisión mayor de 0.025 m y errores menores al 1%.
La información generada permitió la elaboración de mapas de diagnóstico de la resistencia a la penetración (RP) a diferentes profundidades. Dichos mapas contienen atributos de la ubicación de las capas compactadas y la magnitud de la resistencia a la penetración.

