











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkIntroducción
Los objetos terrestres reflejan la radiación solar en función de la dirección de visión de un sensor y de la iluminación (Kimes, 1983; Ranson et al., 1985; Bolaños et al., 2007). La información espectral multi-angular puede ser usada para definir la función de distribución bidireccional de la reflectancia (BRDF, por sus siglas en inglés). La BRDF de una pequeña superficie de área (δA) está definida como la razón de la radianza incremental dejando la superficie a través de un ángulo sólido infinitesimal en la dirección definida por el vector de visión Ω(θv,Øv), sobre la irradianza incremental de la dirección definida por el vector de iluminación, Ω'(θs,Øs), (Nicodemus et al., 1977), tal como se muestra enseguida:
 (1)
(1)
donde: dLe es la radianza incremental reflejada desde la superficie en la dirección del ángulo de visión Ω (Wm-1 sr-1), dEi es la irradianza incremental que llega desde la dirección de iluminación Ω' (W m-1 sr-1), θs es el ángulo cenital solar, s es el ángulo acimutal solar, θv es el ángulo cenital de visión y v el ángulo acimutal de visión.
Desde una perspectiva teórica se ha argumentado que la información espectral multi-angular puede ser usada para discriminar tipos de vegetación, así como mezclas de suelo-vegetación (Pinty et al., 2002; Zhang et al., 2002). Así, la medición de las reflectancias multi-angulares en el sistema suelo (fondo)-vegetación es una tarea necesaria para caracterizar la BRDF y funciones similares.
Uno de los primeros sistemas de medición multi-angulares de las reflectancias fue el PARABOLA (Deering y Leone, 1986), el cual ha sido modernizado para una mejor operación y funcionalidad (Bruegge et al., 2000). Otro sistema utilizado es el FIGOS (Sandmeier e Itten, 1999). Ambos sistemas de mediciones angulares (goniométricas) han sido automatizados para el muestreo angular cenital y acimutal (dos grados de libertad solamente) sobre la semi-esfera arriba del plano de observación, permitiendo la toma continua de datos en tiempos cortos, evitando así problemas asociados a cambios en la iluminación solar. Aunque diseñados para mediciones en campo, estos sistemas pueden ser usados también en el laboratorio.
En este trabajo se presenta el diseño y operación, ejemplificado con un experimento en laboratorio, de un sistema goniométrico de bajo costo y eficiente para la generación de firmas espectrales multi-angulares de mezclas suelo-vegetación.
Materiales y métodos
Los sistemas como el PARABOLA y FIGOS son costosos y muy pesados para su manejo en forma simple. Ante lo anterior, se diseñó un sistema goniométrico de mediciones de las reflectancias (SIGO) de bajo costo y de fácil manejo, basado en los desarrollos de Coburn y Peddle (2006), pero con un grado de libertad adicional. En la Figura 1 se muestra la geometría del SIGO, así como del área de visión en sección y planta.
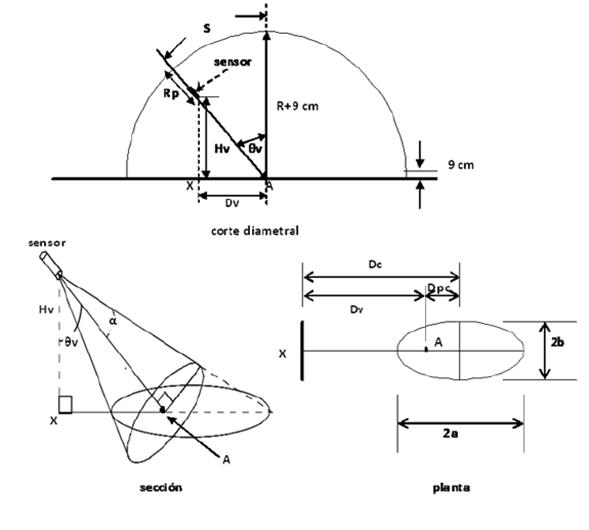
Para un campo de visión instantáneo (IFOV, por sus siglas en inglés), 2α, de un sensor espectral, podemos definir completamente la geometría de visión por las variables S y Rp (Figura 1), para un diámetro nominal R del arco acimutal:
 (2)
(2)
El SIGO tiene un diámetro acimutal de 200 cm (± 2 cm), un radio cenital R de 100 cm (± 1 cm) y una configuración con tres grados de libertad: acimutal, cenital y radial. Para fines de manejo en las mediciones espectrales multi-angulares, se dejó un segmento recto en la base del arco cenital de 9 cm (Figura 1).
Sistema Goniometrico del Colegio de Postgraduados (SIGO-CP)
Con la finalidad de obtener mediciones multi-angulares de reflectancias en diferentes tipos y condiciones de vegetación natural con iluminación natural (campo) o artificial (laboratorio) se diseñó y construyó un goniómetro el cual opera en conjunto con un espectroradiómetro hiperespectral (350 a 2500 nm) modelo FieldSpecFR Jr de ASDMR, un sensor de temperatura radiativa modelo IRTS de la marca ApogeeMR y una cámara digital Cybershot DSC-V1 de SonyMR. El radiómetro cuenta con dos IFOV (2α = 10 y 25) y el sensor de temperatura radiativa tiene un IFOV de 19.8º. El goniómetro consta de un círculo acimutal y de un arco cenital: acimutalmente va de 0° a 360°, siendo el incremento mínimo de 10° y cenitalmente de 0° (nadir) a 60°, con incrementos de 10°, donde ambas mediciones pueden ser configurables. El goniómetro consta de cinco partes: un círculo acimutal, un arco cenital, una varilla corrediza en la dirección radial en la que se montan los sensores, tres sistemas de rodamiento y los soportes que permiten elevarlo de 0.20 a 1 m. Tanto el círculo como el arco están fabricados de PTR galvanizado de 11/4 pulgadas y la varilla es una platina de 3/4 de pulgada de acero. El sistema de rodamiento consta de tres baleros en cada una de las bases, para brindar mayor estabilidad. El círculo acimutal se desarma en dos partes y el arco cenital se desmonta de los sistemas de rodamiento, para facilitar su transportación. Aún cuando está fabricado de acero, el peso del goniómetro es fácilmente manejado y ensamblado por dos personas. La Figura 2 muestra el diseño y las componentes básicas del SIGO-CP.

Los sensores están montados en la varilla corrediza de tal forma que estos quedan situados al centro y por debajo del arco cenital, lo que ocasiona una pequeña sombra de ±3 cm de ancho cuando el arco cenital queda ubicado exactamente en el mismo cuadrante de la fuente de iluminación (acimut relativo 0-10). No obstante lo anterior, la sombra únicamente afecta la medición de acimut 0 reduciéndose su efecto en las siguientes tres tomas (acimut 10, 20 y 30), a partir del acimut 40 la sombra queda fuera del área de visión del radiómetro (41 cm de diámetro). En la Figura 3 se muestran los componentes del SIGO-CP, montado en un cuarto oscuro en laboratorio.

Implementación en laboratorio del SIGO-CP
El SIGO-CP fue implementado para su operación, en una primera fase, en un cuarto oscuro (cortinas verticales negras y piso/techo pintados de negro mate) de laboratorio (véase la Figura 3), bajo condiciones de iluminación artificial. Este tipo de implementación permite un mayor control en la geometría de iluminación y de visión, además de que incrementa el control en la geometría de la muestra y permite operar en condiciones no óptimas de iluminación natural, por ejemplo lluvia y nublados (Dangel et al., 2003).
Para ejemplificar el uso del SIGO-CP en la discriminación de clases de vegetación usando información espectral multi-angular, se presenta información de un experimento bajo condiciones controladas de laboratorio, donde se simularon diferentes configuraciones geométricas de especies vegetales contrastantes. Para esto se utilizaron plantas jóvenes en las especies arbóreas y arbustivas; y plantas adultas para pastizales, después de podarse. Las plantas individuales de cada especie, dentro de bolsas de plástico y sin estrés, fueron acomodadas en tres densidades de acuerdo a los arreglos mostrados en la Figura 4. Los arreglos de plantas fueron colocados en un cajón de madera de dimensiones de 1.5 m × 1.5 m, con un sistema de malla de 15 cm × 15cm para la colocación de las plantas individuales, de tal manera que no se inclinaran al apoyarse sobre el fondo del cajón. Para analizar el efecto del fondo de los arreglos de plantas, arriba de la malla superior del cajón se colocaron tiras de madera a la altura del inicio de los tallos de las plantas y sobre estas tiras, selladas en los tallos, se colocó suelo previamente seleccionado y con una granulometría menor a 2 mm. La Figura 5 muestra el cajón usado en el diseño de diferentes configuraciones de arreglos geométricos de plantas por especie.
Figura 4 Esquematización de las densidades de plantas usadas: a) alta (49 plantas), b) media (25 plantas) y c) baja (12 plantas). Las densidades entre paréntesis corresponden a las reales usadas en el experimento.
En la Figura 4, cada círculo de color verde representa la posición de una planta y los cuadros perimetrales más claros solo contienen suelo. El círculo mostrado al centro de los cuadros (indicado con color rojo) es el área de visión del sensor hiperespectral con un ángulo de visión a nadir.
La fuente de iluminación utilizada fue un reflector de aluminio de cuerpo negro de la marca Tecno LiteMR equipado con una lámpara de halógeno de cuarzo de 500 watts de la marca OsramMR (modelo 64 706). Los filamentos de estas lámparas son de tungsteno y el vidrio que recubre el filamento esta hecho de cuarzo, siendo el halógeno el gas que rellena el tubo o bombilla. La lámpara se montó en una base telescópica elevada a 3 m y su ángulo cenital (θs) fue de 38º. Estas condiciones de iluminación fueron mantenidas constantes para todas las mediciones de las especies vegetales analizadas. La Figura 6 muestra el sistema de iluminación utilizado en el laboratorio.
La definición de la BRDF (Nicodemus et al., 1977), implica ángulos sólidos infinitesimales por lo que no puede ser medida en la práctica. El arreglo de medición de reflectancias en condiciones de laboratorio discutido anteriormente implica la caracterización de los factores de reflectancia bi-cónicos o cónico-cónico (CCRF por su siglas en inglés) (Nicodemus et al., 1977; Schaepman-Strub et al., 2006), donde el termino cónico es usado para el ángulo sólido (iluminación y visión), similar al mostrado en la Figura 1. Las mediciones de reflectancia del radiómetro hiperespectral se refieren en realidad a factores de reflectancia, los cuales son calculados en función de las propiedades ópticas de un panel de referencia (ASD, 1999).
En los sistemas goniométricos de configuración estándar (dos grados de libertad), el área de visión del radiómetro se incrementa con el ángulo de visión y la elipse que se observa (Figura 1) incrementa su factor de anisotropía FA. En el Cuadro 1 se muestra la geometría de esta configuración estándar para el caso del experimento del laboratorio discutido. El factor de anisotropía es invariante bajo efectos de distancias radiales de observación, por lo que la mediciones multi-angulares tienen implícitos efectos de escala, por lo que la definición de la BRDF debe extenderse para considerar las variaciones espaciales de las mediciones (Di Girolamo, 2003).
Cuadro 1 Configuraciones estándar y alternativa del SIGO-CP.
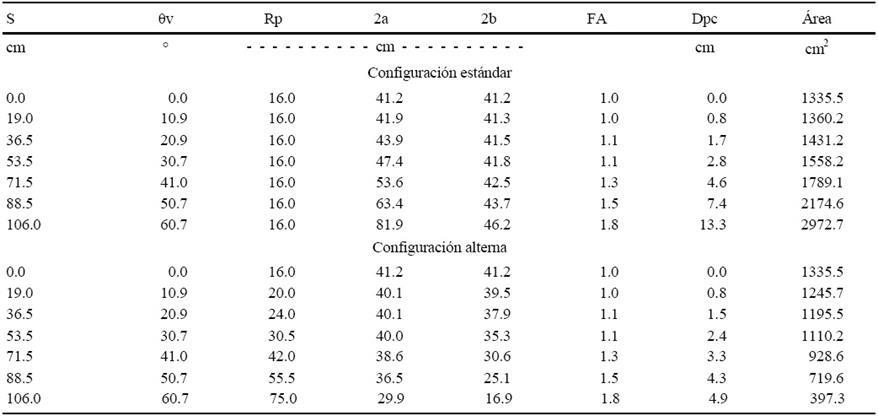
El significado de las variables está definido en la Figura 1.
Del grado de libertad adicional (dirección radial), en el Cuadro 1 se muestra la configuración alternativa usada en el experimento de laboratorio, donde el área de observación a nadir es la máxima, evitando así problemas de bordes y minimizando efectos exteriores. De los datos mostrados en el Cuadro 1, el diseño experimental fue planteado para dos consideraciones: evaluación de efectos multi-angulares con un mínimo efecto de escala (θv ≤ 30º) y con efecto de escala marcado (θv ≥ 30º); incluyendo la combinación de las dos condiciones.
Aplicación de Eventos de Precipitación en Laboratorio
Las propiedades ópticas de los fondos de los arreglos de plantas contribuyen a la BRDF del sistema suelo-vegetación. Así, en cada arreglo de plantas por especie vegetal se consideró el uso de dos fondos: suelo claro (franco arenoso) y oscuro (franco arcilloso). Los suelos fueron colocados sobre las tiras de madera a la altura del inicio de los tallos de las plantas, con un espesor de 1 cm. En cada suelo se consideraron dos condiciones de humedad: suelo secado a la intemperie y suelo húmedo producto de un evento de precipitación, para este último caso se utilizó un simulador de lluvias tipo Morin (Morin et al., 1967), donde el cajón del SIGO-CP con el arreglo de plantas se transportó a la base del simulador, en la misma área experimental, y se le aplicó un evento de precipitación con un disco de 75 mm durante 5 minutos con la llave del simulador abierta al máximo, lo cual aporta una lámina de precipitación de 8.3 mm. La simulación de precipitación fue utilizada para analizar el efecto de ésta en el suelo del fondo de la vegetación, inmediatamente después del evento. La Figura 7 muestra el transporte y montado del cajón de medición del sistema suelo-vegetación en el simulador de lluvias.

Ejemplos de los Resultados de las Mediciones
Las mediciones hiperespectrales de los factores de reflectancias fueron convertidos a las bandas del sensor TM5 del satélite Landsat, usando las funciones de respuesta correspondientes. En la Figura 8 se muestran diagramas multi-angulares para las bandas del rojo (R) y del infrarrojo cercano (IRC) de una de las especies analizadas, para el caso de un suelo claro (tercer dígito igual a 1) y oscuro (tercer dígito igual a 2), bajo condición seca (cuarto dígito igual a 1) y mojada (cuarto dígito igual a 2). En la Figura 8 se usó la convención de ángulos cenitales negativos en la dirección de iluminación y ángulos acimutales (diferencias) positivos en el semi-hemisferio de 0 a 180º, midiendo acimut en la dirección contraria a las manecillas del reloj.

Conclusiones
En este trabajo se presentó el diseño y ejemplo de operación de un sistema goniométrico (SIGO-CP) para la medición espectral multi-angular del sistema suelo-vegetación en campo y laboratorio. La implementación en laboratorio bajo condiciones de iluminación artificial fue discutida y ejemplificada para un experimento de medición espectral de diferentes geometrías de plantas en especies vegetales. El diseño del sistema permite obtener reflectancias y temperaturas radiativas multi-espectrales similares a sistemas más costosos y complejos de operar. Aunque su operación es manual, los tiempos de ejecución de un ciclo completo de mediciones acimutales-cenitales es menor a quince minutos, tiempo razonable para tener condiciones constantes de iluminación solar en campo.
Las mediciones multi-angulares obtenidas pueden usarse para la discriminación de tipos de vegetación.

