










Serviços Personalizados
Journal

Artigo
 Espanhol (pdf)
Espanhol (pdf)
 Artigo em XML
Artigo em XML Referências do artigo
Referências do artigo
 Enviar este artigo por email
Enviar este artigo por emailIndicadores
 Citado por SciELO
Citado por SciELO Links relacionados
-
 Similares em
SciELO
Similares em
SciELO
Compartilhar

 Permalink
PermalinkArchivos de neurociencias (México, D.F.)
versão On-line ISSN 1028-5938versão impressa ISSN 0187-4705
Arch. Neurocien. (Mex., D.F.) vol.10 no.3 Ciudad de México Jul. 2005
Reporte técnico
Desarrollo de un aparato estereotáctico con el sistema de arco centrado
Developed stereotactic apparatus with centered arc systems
Juan Carlos Lara1, Daniel Guillermo Hernández2, Mario A. Alonso–Vanegas3
1Departamento de Neurocirugía, Centro Médico Militar, Guatemala. 2Talleres Industriales Hernández, Ciudad de Guatemala, Guatemala. 3Subdirección de Neurocirugía, Instituto Nacional de Neurología y Neurocirugía. México D.F.
Correspondencia:
Juan Carlos Lara,
6ª avenida 7–39 zona 10, Edificio Las Brisas, Oficina 201,
01010 Guatemala, Guatemala. C.A.
E–mail: jclaraneurosurg@hotmail.com
Recibido: 30 mayo 2005.
Aceptado: 13 junio 2005.
RESUMEN
En la práctica neuroquirúrgica actual se requiere contar con la opción de cirugía guiada por estereotaxia, la cual está indicada en aproximadamente 10 % de los procedimientos neuroquirúrgicos. Desde hace poco más de una centena de años se han desarrollado diversos sistemas en los diferentes centros quirúrgicos, cada uno de ellos supliendo algunas necesidades particulares aunque presentando ciertas desventajas. En el presente artículo se describen estos sistemas, con referencia particular a sus indicaciones, ventajas y desventajas. Se describe un aparato diseñado y desarrollado por los autores para cumplir las necesidades particulares de un centro de tercer nivel en México. Este aparato se basa en el principio del arco centrado incompleto, con marco circular por considerarse el más flexible para su uso en un servicio de neurocirugía general, no dedicado específicamente a cirugía funcional. Además, se presenta una forma práctica de realizar los cálculos de coordenadas del arco, definiendo un punto de entrada (entry point) sin necesidad de software adicional.
Palabras clave: estereotaxia, arco centrado, biopsia cerebral, cirugía guiada.
ABSTRACT
Neurosurgical practice today requires an option for stereotactic neurosurgery which is indicated in approximately 10% of all neurosurgical procedures. Since over a century diverse systems have been developed in different neurosurgical centers to meet particular requirements, albeit presenting certain disadvantages. In the present article, we describe these systems with particular reference to their indications, advantages and disadvantages. We describe a system designed and developed by the authors to meet particular requirements in a third level health center in Mexico. This apparatus is based on the principle of an incomplete centered arch, with a circular frame since it was considerate the most flexible for a general neurosurgery practice, not dedicated specifically to functional neurosurgery. Furthermore, a practical method for calculating coordinates is described, which defines the point of entry without the need of additional software.
Key words: stereotactic, centered arc systems, biopsy, guided surgery
Actualmente en la práctica neuroquirúrgica es indispensable disponer de un sistema estereotáctico multifuncional. Aproximadamente 10% de los procedimientos neuroquirúrgicos tienen indicación de ser realizados por medio de cirugía estereotáctica1. Las indicaciones incluyen: 1. biopsia de lesiones de menos de 3 cm de diámetro, lesiones profundas, localizadas en áreas esenciales elocuentes y lesiones múltiples; 2. craneotomías centradas o guiadas para biopsia o resección; 3. colocación de catéteres para drenaje de quistes, derivación de líquido cefalorraquídeo (LCR), quimioterapia y braquiterapia intratumoral; 4. colocación de electrodos ortogonales y no–ortogonales para monitoreo electrofisiológico en la fase dos de la evaluación prequirúrgica de pacientes con epilepsia; 5. estimulación cerebral profunda (casos de dolor, movimientos anormales, etc.); 6. localización de blancos quirúrgicos y generación de lesiones cerebrales (para psicocirugía, tratamiento de dolor y movimientos anormales); 7. evacuación de hematomas intraparenquimatosos1,2,3,4.
La primera técnica de localización intracraneal en la era científica moderna fue acreditada a Dittmar5 quien fue el primero en insertar una cánula guiada en el bulbo raquídeo de una rata; después Zernov6 en Rusia en 1889 describió un encefalómetro que fue usado en una demostración de uso clínico por Altukhov dos años después. La historia de la cirugía estereotáctica en su concepción actual inicia con el uso de los principios cartesianos de Horsley y Clarke, quienes describen el primer aparato estereotáxico (del griego stereo para "tres dimensiones" y taxis para "movimiento") para uso en animales en 1908 y determinan los parámetros y las referencias para desarrollar el primer atlas estereotáxico en monos. Sin embargo, no desarrollaron un aparato para uso en humanos7,8. Fue en 1918, cuando Mussen, un ingeniero que había trabajado con el aparato de Horsley–Clarke, diseñó un aparato similar para el cráneo humano9,10, más, no logró convencer a sus colegas neurocirujanos contemporáneos de usarlo. Las primeras marcas de referencia recomendadas fueron óseas, sin embargo, debido a la gran variabilidad respecto a las estructuras cerebrales, éstas eran imprácticas, y no fue sino hasta que Spiegel y Wycis, en 1947, describieron un aparato que usaba rayos X (Rx) para visualizar las referencias en el cerebro, que se desarrolló la llamada estereoencefalotología11 y puntos de referencia estandarizados. En un inicio se utilizó el foramen de Monroe, la calcificación de la glándula pineal o la comisura posterior como puntos de referencia, pero, pronto se tomó la línea intercomisural recomendada por Talairach y asociados12, convirtiéndose en el estándar.
Todos los sistemas estereotácticos pueden ser clasificados en uno de 4 sistemas conocidos, a saber: 1. el traslacional o rectilíneo; 2. el arco centrado; 3. el montado en trépano; y 4. el sistema de arcos interconectados13.
Sistemas traslacionales
También conocidos como biplanares, permiten la introducción de una cánula, corrigiendo la dirección en sentido sagital, lateral o vertical con base en estudios de rayos X antera posteriores (AP) y laterales, calculando la profundidad con el desplazamiento lineal del soporte o carro porta cánula.
El estereoencefalotomo original consiste en un anillo alineado a la línea basal de Reid que se fijaba al cráneo con pasta de París; sin embargo, para su uso en cirugía funcional Spiegel–Wycis realizaron algunas adaptaciones con el fin de hacer más práctico su uso, en especial reducir el tiempo consumido en colocar la pasta de París y alinear adecuadamente el aparato. En total hicieron 5 modelos incorporando ajustes angulares y planos traslacionales14.
El sistema de Talairach fue diseñado inicialmente en 1949, consistía en un anillo de aluminio fijado al cráneo por cuatro tornillos sujetadores, cuatro láminas metálicas con múltiples orificios equidistantes fijadas de tal manera que quedaran paralelas al paso de los rayos X en los planos AP y lateral. De esta manera, era posible determinar la distancia de cada estructura cuando se superponían a los ventriculogramas o arteriogramas, y realizar abordajes ortogonales. Tenía la ventaja, principalmente para los casos de cirugía de epilepsia, de que se podían colocar varios electrodos al mismo tiempo15. Una desventaja importante es su poca compatibilidad con tomografía computada (TC), aunque se le puede adaptar con facilidad un anillo compatible. Debido a su simplicidad, este sistema aún se usa en muchos centros alrededor del mundo, principalmente en Francia. Mediante este diseño, además de la publicación de dos atlas en 1957, Talairach contribuyó de forma sustancial al desarrollo de la cirugía funcional168. En Japón en 1947, en precarias condiciones de guerra, Narabayashi desarrolló un sistema traslacional, que le permitió definir la masa intermedia del tálamo y usarla como punto de referencia para realizar experimentos en el globo pálido y el núcleo dorsomedial del tálamo en busca del origen del temblor y la rigidez17,18. El siguiente modelo innovador en el desarrollo de sistemas traslacionales lo diseñaron Guioty Gillingham, quienes, durante los 50's desarrollaron su sistema, modificado en 1960, que consistía en un arco que se fijaba al nasion, la sutura coronal y el lambda mediante tornillos sujetadores colocados a lo largo de la línea media. Esto facilitaba la obtención de los puntos de referencia mediante ventriculografia, y el paso de un electrodo a través de un agujero occipital hasta el tálamo con controles laterales y verticales. Este fue el único instrumento diseñado para usar esta trayectoria a través del tálamo. Debido al abordaje posterior era necesario atravesar el tálamo, la cápsula interna y el pálido. Esto permitió realizar trazos electrofisiológicos, que de otra manera no eran posibles, por medio de un solo trayecto coronal19,14. Subsecuentemente, Turner y Shaw23 aplicaron una modificación usando coordenadas cilindricas. Otros sistemas fueron diseñados por Bailey y Stein en 194921; Hayne y Meyers en 195022.
Los sistemas de trépano
En busca de la simplicidad, algunos investigadores desarrollaron sistemas menos onerosos para asegurar la localización topográfica. El diseño básico consistía en un artefacto montado en el área de trepanación del cráneo donde se montaba el resto del sistema. Se trazaban líneas entre el blanco y el centro de la esfera en planos bidimensionales obtenidos por las proyecciones antero–posterior (AP) y lateral de los Rx, determinando así los ángulos del abordaje. La profundidad podía ser calculada midiendo la distancia del blanco quirúrgico a la tabla interna del cráneo; sin embargo, el cálculo de los ángulos debía ser muy exacto porque un error mínimo podría reflejarse en una distancia muy grande en la punta de la cánula. Los modelos más populares fueron del tipo de bola plástica reportado por Austin y Lee en 195823. Se realizaba el trépano, se ajustaba la base del aparato al cráneo y la esfera de plástico, se tomaban Rx y se calculaban los ángulos y la profundidad para introducir la cánula. El peso era de aproximadamente 2 onzas y el costo de alrededor de 37.50 US dólares. Posteriormente Cooper (1955), McCaul (1959), Rand (1961) y Kandel en Moscú (1970) desarrollaron sus propias versiones de sistemas montados en agujeros de trépano, basados en coordenadas polares13.
Sistemas de arco centrado
Son los sistemas más comúnmente utilizados en la actualidad. Consisten en un anillo que se fija a la cabeza del paciente con tornillos sujetadores, y que tiene un arco semicircular ajustable a diferentes coordenadas de tal manera que el blanco elegido quede en el centro del arco permitiendo el abordaje desde cualquier punto del mismo.
Influenciado por su visita a Philadelphia en 1947, Lars Leksell regresó a Suecia para diseñar su propio aparato en 1949, con el objetivo de que fuera fácil de manejar y práctico en el trabajo clínico rutinario. El arco estaba basado en coordenadas rectilíneas polares y fijado al cráneo por 3 tornillos sujetadores, la base soportaba un arco semicircular donde corre o se desplaza el aditamento que porta la cánula. Siendo posible alcanzar el blanco desde cualquier punto del cráneo, el sistema se basaba en principios concéntricos, dado que consideraba que el blanco siempre iba a estar en el centro del arco. Otro de los avances que se ha implementado en estos sistemas es la posibilidad de tomar las coordenadas directamente de la imagen de TC y RM24. El modelo más reciente es compatible con todas las técnicas de imagen. El arco centrado se convirtió en un sistema popular, Todd y Wells desarrollaron un sistema de arco centrado25 en el cual el sistema de fijación estaba sujeto a una base fija en el suelo y de la cual dependía el sistema de coordenadas y movimiento del arco, por lo anterior, tenía limitaciones para blancos laterales y necesitaba muchos ajustes manuales, además, obstruía a la hora de realizar craneotomías.
Otro sistema de arco fue desarrollado por Riechert y Mundinger26, éste consiste en un anillo que se fija a presión en eminencias o depresiones óseas, sobre el cual estaba adosado al arco siendo necesario armar todo el sistema y realizar Rx para determinar el punto de penetración, determinar las coordenadas del blanco, después armar las coordenadas en el simulador, fue diseñado con objeto de encontrar el ángulo y la profundidad que debía alcanzar la cánula. Dadas sus características, este sistema permite múltiples penetraciones a diferentes niveles a partir de una sola trepanación, usa el simulador en busca de mayor exactitud y no necesariamente funciona como arco centrado al poder dirigir la cánula a una dirección diferente al centro del arco; sin embargo, dado que el arco requería soporte bilateral tenía limitaciones para realizar craneotomías guiadas por estereotaxia. Gracias a la integración de un software computarizado para el cálculo de los ángulos y coordenadas. Este avance incrementó la versatilidad del sistema e incluso en la actualidad se usa en varios centros dedicados a la cirugía funcional. Otro sistema de arco fue desarrollado por Patil27 para uso específico con TC, el cual permite la corroboración inmediata de la situación de la cánula pero es poco versátil para abordajes laterales y no es adecuado para abordajes de fosa posterior.
De características similares pero más versátil es el sistema diseñado por Gouda y Gibson en 198028 el cual funciona como arco centrado pero posee un dispositivo que permite una vez que el paciente ya colocado en el aparato, se pueda alinear el eje sagital de las coordenadas con el plano de la línea intercomisural, de tal manera que se eviten complejos cálculos de ángulos al momento de trazar las coordenadas del blanco.
El sistema de Zamorano–Dujovny (ZD)29 consta de un anillo que se fija al cráneo por medio de 4 tornillos sujetadores, un arco incompleto que se desplaza según las coordenadas previamente definidas. Este sistema permite realizar abordajes de fosa posterior y transfaciales con montajes en cualquiera de los 4 puntos polares del anillo. Es posible abordar el blanco desde cualquier punto de su circunferencia, lo cual ayuda al cirujano al momento de hacer la craneotomía. Además, durante la cirugía la cabeza del paciente puede ser rotada, de manera que pueda colocarse en la posición ideal según la craneotomía que se desee realizar. Es compatible con cualquiera de los métodos de imagen existentes y cuenta con aditamentos adicionales como el simulador para cirugía funcional.
En 1970, Nashold y Harrison diseñaron un sistema para producir lesiones en el núcleo dentado del cerebelo en pacientes con espasticidad asociada con parálisis cerebral. Este instrumento fue único puesto que tenía una función específica: explorar el cerebelo12.
Para sus trabajos de electrofisiología Olivier, Bertrand y Tippal (OBT) diseñaron su aparato estéreo–táctico modificando el marco de Leksell30–33. Su sistema combina un abordaje ortogonal con coordenadas rectilíneas. La ventaja de su marco es la amplitud del espacio de trabajo para la implantación de múltiples electrodos, los cuales se pueden colocar simplemente con Rx, en forma similar al sistema de Talairach.
Sistema de arcos interconectados
Consiste en un anillo fijado al cráneo sobre el cual se montan varios arcos intercalados para guiar la cánula obteniendo las coordenadas del blanco en ángulos proporcionados por un sistema computarizado que permite calcular las coordenadas del blanco a partir de una trayectoria previamente definida. A este grupo pertenece el sistema de Brown Roberts Wells (BRW), el cual tiene 3 características especiales. Convierte datos de un tomógrafo u otro sistema bidimensional en coordenadas tridimensionales usando referenciales intercaladas con forma de N, es capaz de llegar al blanco desde un número infinito de posiciones y se puede verificar su exactitud antes de la cirugía, ya que cuenta con un simulador. Sin embargo, tiene acceso limitado para el área de la cara o la región occipital y la programación para abordar lesiones múltiples, consume mucho tiempo34,35.
Sistemas sin anillo o sin cabezal
Debido a que cualquiera de los sistemas anteriormente descritos tiene la desventaja de representar molestias al paciente al momento de fijarse al cráneo e incomodidad para el cirujano durante la cirugía, se desarrollaron los sistemas sin anillo. Estos usan marcas referenciales radio–opacas aplicadas al cuero cabelludo antes de la TC. El primero de estos sistemas fue desarrollado por Roberts et al en 198636, y tiene la ventaja de proporcionar información de la relación entre la imagen al microscopio y un sistema de coordenadas previamente definido por los estudios de imagen. Después, mediante el desarrollo del llamado neuronavegador en Japón37,38, se intentaba crear una interacción más constante entre el cirujano y el sistema de referencia. La exactitud clínica reportada para los neuronavegadores es de 2.5–5 mm. Ya que es inevitable la descompresión por pérdida de LCR durante la craneotomía o la penetración a los ventrículos, se han creado aditamentos para compensar este posible error mediante el uso de ultrasonido, sensores magnéticos o TC transoperatoria35,39–41.
A la par del desarrollo de múltiples sistemas de estereotaxia se han organizado importantes centros de cirugía funcional alrededor del mundo como los de Talairach y asociados, y Guiot y asociados en Paris, Gillingham en Inglaterra, Litinen y Toivakka en Finlandia, Bertrand y colaboradores en Canadá, Velasco–Suárez y Escobedo en México, Obrador en España y Bechetereva en Rusia.
Sistema Lara–Hernadez–Alonso (LHA)
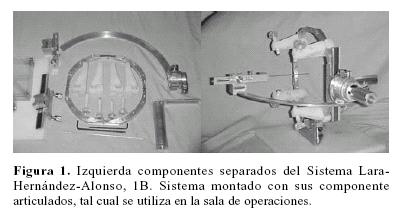
El sistema diseñado por lo autores, y presentado en este artículo, buscó cumplir los siguientes objetivos: 1. que el sistema fuera adaptable con facilidad a cualquier tomógrafo; 2. que no fuera indispensable utilizar un software de computación para usar el aparato de manera rutinaria; 3. que fuese suficientemente preciso en la localización y definición topográfica de las lesiones para garantizar la seguridad del paciente; 4. que fuese práctico para facilitar al neurocirujano su uso en diferentes tipos de abordajes, utilizándolo de forma práctica en cirugías guiadas, biopsias cerebrales, colocación de electrodos y catéteres, figura 1.
Se consideró que el principio del arco centrado incompleto es el sistema más versátil para un servicio que no se dedica sólo a cirugía funcional.
El sistema fue construido con duraluminio 6061, un aluminio más resistente a la torsión, los postes de fijación se realizaron en Ertalon, los pinchos en acero inoxidable 304 con recubrimiento de Ertacetal y el sistema de referencia fue fabricado con acrílico. Todos son materiales esterilizables, biocompatibles, radio–opácos y que no producen refracción en el tomógrafo.
Para trasladar las coordenadas del blanco del tomógrafo al aparato se usa el sistema de coordenadas polares que, basado en dos diámetros perpendiculares de un círculo centrado en la escala referencial del tomógrafo, proporciona las coordenadas X y Y, siempre y cuando el anillo esté orientado adecuadamente. Además, al combinarlo con el uso de placas de acrílico con surcos trazados en forma de triángulo equilátero se obtienen en un mismo plano de estudio, las coordenadas X, Y y Z adecuadas para localizar cualquier blanco con exactitud aceptable, siendo el error calculado de aproximadamente 2mm.
El marco es un anillo redondo con carillas aplanadas (figura 2) que permite articular y fijar tanto los referenciales de acrílico, que sirven para obtener las coordenadas en el tomógrafo, como, el mecanismo de coordenadas del arco, que es el conjunto de piezas que permite localizar, con exactitud milimétrica, por medio del desplazamiento de sus elementos, un punto en el espacio del marco estereotáctico.

La fijación se hace por medio de tornillos de acero forrados de Ertacetal que se articulan con postes de Ertalon que pueden rotar su eje para quedar perpendiculares al cráneo (figura 2).
El arco (figura 3) tiene una sola base de apoyo para su articulación con el marco estereotáctico, agilizando cualquier procedimiento, independientemente de la posición en que esté colocada la cabeza del paciente en la mesa de operaciones, y se extiende 110 grados permitiendo el desplazamiento del soporte o carro porta cánula.

El mecanismo de coordenadas está compuesto por tres superficies de aluminio paralelas a cada uno de los ejes espaciales (X, Y y Z) calibradas con escalas milimétricas y unidas por un sistema de doble entrada que se fija con tornillos de acero de cabezas hexagonales tipo alien y punta protegida con plástico (figura 3).
El soporte o carro porta cánula es un aditamento con escala milimétricas que permite sujetar la cánula de biopsia en 2 puntos, de manera que, cualquier cambio en profundidad, se realice de manera controlada (figura 3).
La base universal permite tomar imágenes en prácticamente cualquier tomógrafo y, en quirófano, sirve de punto de apoyo y fijación (figura 2).
Una vez producidas todas las partes del sistema, se localizó el centro del arco haciéndose coincidir con el centro del anillo, de manera que se encontró el punto donde las tres coordenadas X, Y y Z son cero. Se determinó en los diferentes cuadrantes un error menor a 2 mm, luego se plantaron las diferentes escalas milimétricas en cada eje del mecanismo de coordenadas.
Por ser un arco centrado no es indispensable calcular el punto de entrada (entry point), sin embargo, es posible hacerlo con simples cálculos trigono–métricos, calculando según la fórmula.
Tan (yE–yB)/(zE–zB) = ángulo alfa
Donde yE= coordenada Y del punto de entrada
yB= coordenada Y del blanco
zE= coordenada Z del punto de entrada
zB= coordenada Z del blanco
Tan= función tangente del ángulo
Y donde el ángulo alfa corresponde al ángulo de rotación del arco sobre el eje del punto de fijación (figura 4).

Y la fórmula Tan (xE–xB)/(zE–zB) = ángulo beta
Donde xE= coordenada X del punto de entrada
xB= coordenada X del blanco
zE= coordenada Z del punto de entrada
zB= coordenada Z del blanco
Tan= función tangente del ángulo
Y donde el ángulo beta corresponde al punto en el arco en donde se colocará el soporte o carro porta cánula (figura 4).
CONCLUSIONES
El sistema de arco incompleto permite disponer de varios montajes, característica en especial útil en craneotomías guiadas, el aparato que se propone puede ser usado para hacer biopsias con precisión y cirugías guiadas, incluso de fosa posterior o transes–fenoidales. Puede servir de superficie de fijación para aditamentos como sistemas de retracción cerebral, electrocorticógrafo, endoscopio, etcétera.
El marco circular y el arco incompleto permiten realizar diferentes montajes ya que se puede articular en los cuatro cuadrantes del anillo, otorgando mayor comodidad para posicionar al paciente en el quirófano y evitar obstrucción del campo quirúrgico. En relación a los sistemas traslaciones. El sistema Lara–Hernández–Alonso (LHA) ofrece mayor ventaja al cirujano para hacer cirugías guiadas puesto que es posible la rotación de la cabeza para posicionarla de mejor manera dentro del campo quirúrgico "no" necesita estudios transoperatorios múltiples para corroborar la posición de la cánula y se puede modificar transoperatoriamente el punto de entrada, sin necesidad de hacer nuevos cálculos. En relación al sistema de trépano, tiene muchas más aplicaciones, ya que permite realizar craneotomías guiadas, respecto al sistema de arcos intercalados. El sistema LHA tiene un sistema de cálculo de coordenadas mucho más sencillo y no requiere del uso de un simulador. Permite calcular diferentes blancos mucho con mucha facilidad. Respecto a los sistemas sin anillo, tiene una mayor exactitud puesto que está comprobado que en la actualidad tales aparatos no pueden ofrecer un error menor de 2.5 mm, al igual que otros sistemas de arco como el Riechert y Mundinger y el ZD. El sistema es funcional para abordajes especiales como los transeptoesfenoidales, los abordajes a fosa posterior y de base de cráneo no necesita calcular necesariamente el punto de entrada. El sistema LHA tiene exactitud similar a otros aparatos estereotácticos de uso común.
Debido al material del que finalmente fue fabricado el anillo del modelo B, no es compatible con RM; sin embargo, en la actualidad se encuentra en fase de diseño el modelo C que permitirá hacer cirugía funcional guiada con Rx y será compatible con RM.
REFERENCIAS
1. Heilbrum MP, Brockmeyer D, Sunderland P. Stereotactic surgery for mass lesions of the cranial vault. En: Apuzzo MLJ (Editor) Brain Surgery, Churchill Livinsgtone 1993. [ Links ]
2. Backlund EO, Von Hoist H. Controlled subtotal evacuation of intracerebral hematomas by stereotactic technique. Surg Neurol 1978; 9: 99–101. [ Links ]
3. Schaller C, Rohde V, Meyer B, Hassler W. Stereotactic puncture and lysis of spontaneous intracerebral hemorrhage using recombinant tissue–plasminogen activador. Neurosurgery 1995;36: 328–35. [ Links ]
4. Coffey RJ, Friedman WA. Interstitial brachytherapy of malignant brain tumors using computed tomography–guided stereotaxis and available imaging software: technical report. Neurosurgery 1987; 20: 4–7. [ Links ]
5. Dittmar C. Liber die Lage des sogenannten gefaesszentrums in der medulla oblongata. BerSaechs Ges Wiss Leipzing (Math Phys) 1873; 25: 449–69. [ Links ]
6. Zernov DN. Encephalometer: a device for determination of the location of brain parts of living humans. Proceedings of the society of physico medicine, Moscow 1889; 2: 70–86. [ Links ]
7. Horsley V, Clarke RH. The structure and functions of the cerebellum examined by a new method. Brain 1908; 31:45–124. [ Links ]
8. Alonso–Vanegas Mario A, Acosta Garcés R, Fernández Bouzas A, Mendizabal Guerra R, Sosa Salgado E. Cirugía estereotáxica. Anales del Hospital de Jesús. [ Links ]
9. Olivier A, Bertrand G, Picard C. Discovery of the first human stereotactic instrument. Appl Neurophysiol 1983; 46: 84–91. [ Links ]
10. Alonso–Vanegas MA, Austria–Velázquez Juan J. Historia de la cirugía esteretáctica. Arch Neurocien (México) 2003; 8(3): 158–65. [ Links ]
11. Spiegel EA, Wycis HT, Marks M, Lee AS. Stereotaxic apparatus for operations on the human brain. Science 1947; 106: 349–50. [ Links ]
12. Talairach J, David M, Tournoux P. Atlas dánatomie stereotaxique. Paris: Masson, 1957. [ Links ]
13. Gabriel EM, Nashold BS. Historical development of stereotactic frames. Textbook of stereotactic and functional neurosurgery. En: Gildenberg P, Tasker R (Eds). McGraw–Hill 1998. [ Links ]
14. Kandel El: Functional and stereotactic neurosurgery. New York: Plenum Press 1989. [ Links ]
15. Talairach J, Hecaen H, David M. Recherches sur la coagulation thérapeutique des structures sous–corticales Ches l'homme. Rev Neurol 1949; 81:4–24. [ Links ]
16. Pecker J. Jean Talairach. Surg Neurol 1980;14: 241–2. [ Links ]
17. Narabayashi H. Beginning and development of stereotaxic surgery in Tokio. Confin Neurol 1975; 37: 374–7. [ Links ]
18. UchimuraY, Narabayashi H. Stereotaxic instrument for operation on the basal ganglia. Psychiat Neurol Jpn 1951; 52:65–270. [ Links ]
19. Guiot G, Brion S. Traitement des mouvements anormaux par la coagulation pallidale: Technique et résultats. Rev Neurol 1953; 89: 578–80. [ Links ]
20. Turner JW, Shaw A. A versatile stereotaxic system based on cylindrical coordinates and using absolute measurements.Acta Neurochir Suppl (Wien) 1974; 21: 211 –20. [ Links ]
21. Bailey P, Stein SU. A stereotaxic instrument for use on the human brain: studies in medicine. Springfield, IL: Charles C Thomas 1951. [ Links ]
22. Spiegel EA. Guided brain operations. Methodological and clinical developments in stereotactic surgery. Editorial Karger AG. 1982. [ Links ]
23. Austin G, Lee A. A plastic ball–and socket type of stereotaxic director. J Neurosurg 1958;15: 264–8. [ Links ]
24. Leksell L, Leksell D, Schwebel J. Stereotaxis and nuclear magnetic resonance. J Neurol Neurosurg Psychiatri 1985;48:14–8. [ Links ]
25.Todd EM. Todd–Wells manual of stereotactic procedures. Randolph MA (Ed): Codman and Shurtleff 1967. [ Links ]
26. Riechert T. Development of human stereotactic surgery. Confin Neurol 1975, 7: 399–409. [ Links ]
27. Patil AA. Computed tomography–oriented stereotactic system Neurosurgery 1982; 70–4. [ Links ]
28. Gouda Kl, Gibson RM. New frame for stereotaxic surgery. J Neurosurg 1980;3: 256–9. [ Links ]
29. Dujovny M, Slavin K, Ramirez V. The ZD System for 2D/3D craniotomy. In Textbook of stereotactic and functional neurosurgery. En Gildenberg P, Tasker R (Eds), McGraw–Hill 1998;465–70. [ Links ]
30. Olivier A, Bertrand G. Stereotaxic device for percutaneous twist drill insertion of depth electrodes and for brain biopsy (technical note). J Neurosurg 1982; 307–8. [ Links ]
31. Olivier A, Bertrand G. A new head clamp for stereotactic and intracranial procedures (technical note). Appl Neurophysiol 1982; 2–275. [ Links ]
32. Alonso–Vanegas MA, Comeau R, Davey BLK, Lee U, Brust–Mascher E, Morris R, et al. Utility of multi–modality image guidance in epilepsy surgery. Arch de Neurocien (México) 1999; 4 (4): 224–31. [ Links ]
33. Olivier A, Alonso–Vanegas M.A, Comeau R, Peters T.M. Image–guided surgery of epilepsy. En: Clinical frontiers of interactive image guided neurosurgery. Neurosurgery Clinics of North America. W.B: Saunders Company 1996; 7 (2): 229–43. [ Links ]
34. Heilbrun MP, Roberts TS, Apuzzo MLJ. Preliminary experience with Brown–Roberts–Wells (BRW) computerized tomography stereotaxic guidance system. J Neurosurgery 1983; 59:217–22. [ Links ]
35. Alonso–Vanegas MA, Olivier A, Quesney L.F. Applications of Image–Guided Surgery to Intraoperative Electrophysiology. En: Electrocorticography Current Trends and Future Perspectives. Elsevier 1998. EEG S 48:140–56. [ Links ]
36. Friets EM, Strohbehn JW, Hatch JF. CT Guided Stereotaxis using a modified conventional stereotaxis frame. AJNR 1982;3: 345–51. [ Links ]
37.Watanabe E, Watanabe T, Manaka S Three–dimensional digitizer (Neuronavigator): New equipment for CT–guided stereotaxic surgery. Surg Neurol 1987;27: 543–7. [ Links ]
38. Kato A, Yoshimine T, Hayakawa T A frameless, armless navigational system for computer–assisted neurosurgery (technical note). J Neurosurg 1991; 74: 845–9. [ Links ]
39. Guthrie BL, Adler JR. Computer–assisted preoperative planning, interactive surgery, and a frameless stereotaxy. Clin Neurosurg 1992;38: 112–31. [ Links ]
40. Guthrie BL, Kaplan R, Kelly PJ. Neurosurgical stereotactic operating arm. Stereotact Funct Neurosurg 1990; 54:55497–500. [ Links ]
41. Gildenberg P. The history of stereotactic and functional neurosurgery. En: Gildenberg P, Tasker R (Eds) Textbook of stereotactic and functional neurosurgery. 1998. [ Links ]

