











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink1.Introduction
The Duffing oscillator (DO) is one of the best-known nonlinear models in mathematical physics. This model was proposed by Georg Duffing to describe forced oscillations in engineering problems [1]. However, further studies have shown that this oscillator has a wide range of applications in several contexts (see [2] and references therein). In particular, the DO has been employed in the investigation of dynamical systems and their bi-stability [3] [4], in bifurcation problems [5], in control theory [6] and the investigation of arrays of coupled chaotic oscillators with harmonic excitations [7]. Indeed, Duffing-like equations have been investigated from different points of view, especially in relation to the appearance of chaotic behavior [8-10]. Moreover, the study of fractional forms of those systems is an interesting open problem in nonlinear science [11].
There are various works on coupled nonlinear oscillators which study their bifurcations and resonances [12], and the interactions between a Van der Pol oscillator and a DO [13]. For systems of two coupled DO’s, there are studies which focus on the bifurcation analysis for periodically driven DO’s [14, 15], chaotic synchronization [16] or on-off intermittency [17, 18]. In particular, a Lagrangian analysis is performed in [19] for two coupled undamped DO’s in order to get the corresponding integrals of motion via Noether’s theorem. However, various authors [17, 18] have noted that the damping term is very important to define a bistable system. The construction of Lagrangians for dissipative systems is nicely developed in [20] but, as widely discussed in [21], the potential is not well defined in general for damped systems.
Nowadays, the study of complex networks has gathered a great relevance (see [22] and references therein), and one can find many applications to social networks [23, 24], neural dynamics [25], biology [26] or chemistry [27]. In [22], a motif is defined as a pattern of interconnections occurring either in an undirected or in a directed graph at a number significantly higher than in randomized versions of the graph. The motifs play a fundamental role in complex networks. In general the motifs are defined in terms of the number of nodes. In particular, there are thirteen different configurations for a 3-node connected directed graph. The concept of motif was originally introduced in [28] as the simple building block of complex networks. One can find applications of motifs, for example, in studies about chemical synthesis of topological structures [29], DNA and alignment information [30].
The aim of this work is to construct the Lagrangians and potentials for a two coupled damped DO’s system with directional and bi-directional interactions. The results can be used to describe the dynamics of each one of the 3-node motif network configurations. In Sec. 2, we obtain the Lagrangian for two coupled damped DO’s and show that it is not possible to get a definite potential under the presence of a constant damping coefficient. However, if the damping coefficient has the form of a logarithmic derivative then it is possible to obtain a potential function. Section 3 provides an application of the previous results on 3-node motif networks. More precisely, an illustrative example is performed following some elementary rules. In Sec. 4, we provide numerical simulations of the dynamics of the two types of damping terms discussed in this work. Finally, we close this work with a brief conclusion that summarizes the most important results of this manuscript.
2.Lagrangians and potentials
2.1.Bidirectional case
Consider two coupled identical Duffing oscillators
where
Note that if damping is to be considered in the system (1) then the resulting physical model takes on the form
where the damping coefficient
Then the system (3) is transformed into
After comparing with the systems (1) and (2), the corresponding Lagrangian of the physical model (5) is given by
Note that if (6) is written in terms of the original variables
It is easy to prove that the system (3) is retrieved from this Lagrangian employing the usual Euler-Lagrange equations.
Now, about the corresponding potential associated to the Lagrangian (7), it is well known that potentials are not necessarily defined for dissipative systems in general [21]. However, under certain circumstances it is possible to find a potential for the system (3). For example, in the paper [20], the authors show that an oscillator of the form
admits a potential of the form
As a consequence, the Lagrangian for (8) assumes the form
where clearly
with a potential defined as
2.2.One directional case
Suppose now that the
Using the same arguments of Sec. 2.1, the Lagrangian of the
Note that the coordinate
When
3.Application on networks
In this section, we consider the 13 possible configurations for the three-node motif networks proposed in . Those configurations are shown in Fig. 1 for the sake of convenience. An emitter of the arrow is called master, while the receptor of the arrow is the slave. Of course, any node can be master and slave simultaneously, and any arrow can be bidirectional.
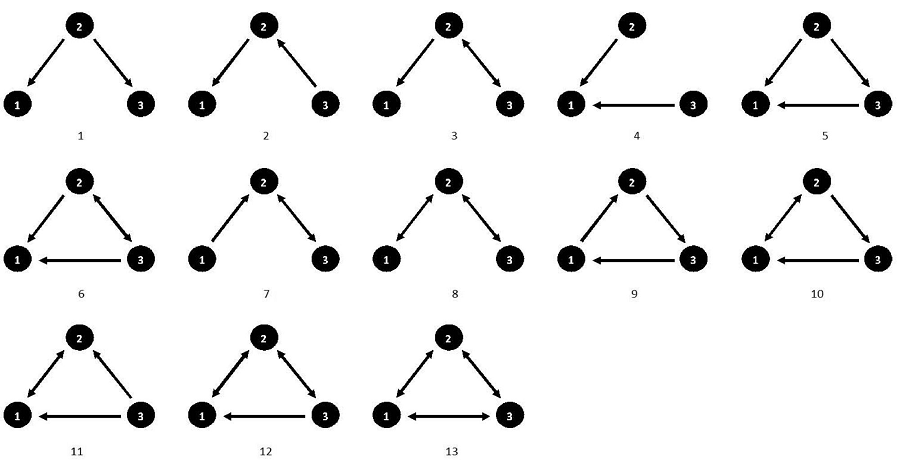
It is possible to describe the equations of motion, Lagrangians and potentials for each configuration using the results of Sec. 2, if we assume that the nodes are identical Duffing oscillators and follow the next rules:
If the
If the oscillators
If the
Finally, if the oscillator
As an example, the equations of motion for the configuration 1 are given by the system of ordinary differential equations
Meanwhile, the Lagrangians for a constant value of
Finally, the Lagrangians and potentials for
4.Numerical results
4.1Constant damping
In this section, we analyze the behavior of the system (25) corresponding to the configuration 1 of the motif networks. To that end, we set the following values for the parameters:
The coupling parameter
Here,
Set
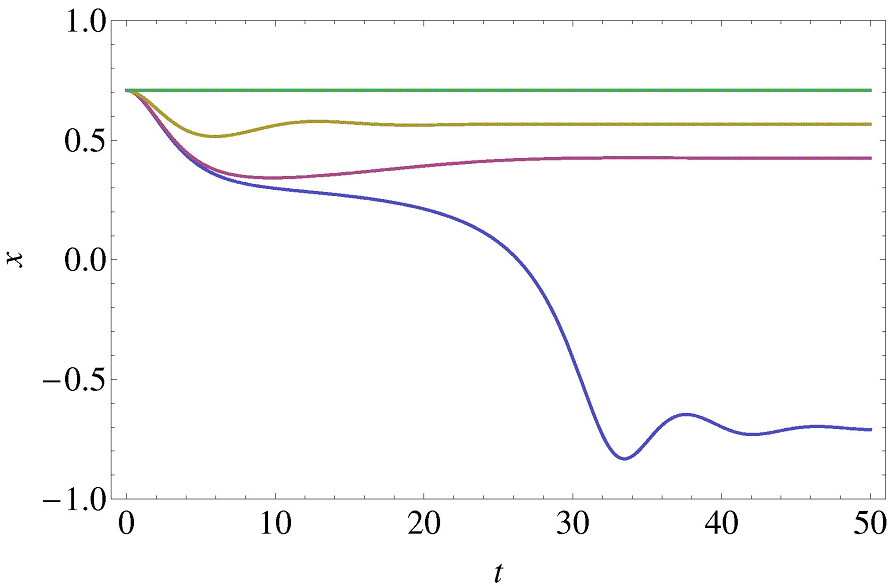
Figure 2 Solutions for the slave oscillators with α constant, for different values of the coupling parameter σ, namely σ = 0 (green), σ = 0:04 (olive green), σ = 0:06 (magenta) and σ = 0:0625 (blue).
Here, we set
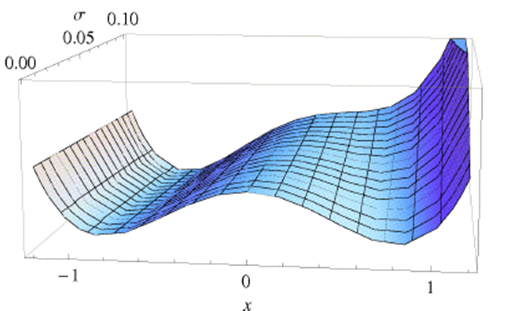
The equation (32) has three solutions:
Obviously, the first solution corresponds to the attractor
then we have only one attractor with real value
4.2.Variable damping
For this case if we propose

5.Conclusion
In this work, we have shown that it is possible to construct Lagrangians [34, 35] for two coupled damped Duffing oscillators both
directionally and bi-directionally. In general it is not possible to obtain a
potential for dissipative systems. However, if the damping coefficient takes the
form

