











 nueva página del texto (beta)
nueva página del texto (beta) Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
PermalinkPACS: 02.10.Yn; 02.30.Hq; 02.10.Ab; 84.30.Sk; 84.30.Le
1. Introduction
In the last two decades, theoretical design of different kind of electronic circuits based on chaos have been a central subject. In this regard, the design of multi-scroll chaotic attractor is a challenging issue. Therefore, there are different choices concerning the implementation of chaotic circuits and one of them is the synthesis of electronic circuits with the capability of generating multi-scroll chaotic attractors. One idea is to modify a system that originally produces double-scroll attractors in such a way that multi-scrolls arise; as for example in the Chua and Lorenz systems 1,2,3,4. As a matter of fact, Suykens and Vandewalle introduced several methods for generating n-scroll chaotic attractors using simple circuits 5,6. Likewise, Yalcin and his colleagues 7 also reported work on multi-scroll chaotic attractors. Therefore, one of the main goals of chaotic systems is the search for alternatives to manipulate the number of scrolls in attractors without losing its dynamical behavior. Hitherto, different techniques are well established in the design of such systems, such as the modification of a simple sinusoidal oscillator 8, the improvement of existing chaotic systems 9,10,11,12 and through multi-fractal processes 13, among others.
In addition, new mechanisms of chaotic system generation have been reported from a theoretical viewpoint 14,15,16,17. A simple technique is carried out in controlled systems by a switching control law 14, aimed at changing the switching control law in order to add further equilibria to the system, where each equilibrium point generates a scroll around it.
In this work, we propose an electronic implementation of a class of 3-D dynamical systems as already reported in Ref. 14. This class of systems is termed unstable dissipative systems (UDS) because it is dissipative in one of its components while unstable in the other two. The UDS are constructed with a switching law in order to accomplish several multi-scroll strange attractors. The strange multi-scroll attractors appear as a result of the combination of several unstable “one-spiral" trajectories. Each of these trajectories lie around a saddle hyperbolic stationary point.
This work is organized as follows. In Sec. 1, both the UDS and the switching law are presented in order to produce multi-scroll chaotic attractors. The proposed electronic circuit of multi-scroll chaotic attractors using this approach is given in Sec. 2. Experimental results are given in Sec. 3, and conclusions are outlined in Sec. 4.
2. Unstable Dissipative Systems
We consider a linear system given by:
where
If the system given by Eq. 1 has a saddle equilibrium point responsible for unstable and stable manifolds and the sum of its eigenvalues is negative, then the system is called unstable dissipative system (UDS). In 14,15 two types of UDS in
Definition 2.1
A system given by Eq. 1 in
Definition 2.2
A system given by Eq.1 in
For the corresponding equilibria two types are defined accordingly. The above definitions imply that the UDS Type I is dissipative in one of its components but unstable in the other two, which both are oscillatory. The converse is the UDS Type II, which is dissipative and oscillatory in two of its components but unstable in the other one. These definitions work well for
Definition 2.3
Let a system defined by Eq.1 in
The following proposition accounts for the types of behavior that are found in UDS system defined by Eq. 1.
Proposition 2.1
Let system (1) be a UDS with an ordered set of
eigenvalues
(a) The system has a stable manifold
(b) Any initial condition
(c) Any initial condition
(d) The basin of attraction
Proof: Let the eigenvalues
For statement (b), using the fundamental theorem for linear systems, the initial value problem of system (1) has a unique solution given by
for a given
The spaces
□
As already outlined in Ref. 14, we now consider a class of a switched system comprising affine piecewise linear systems given by:
where
Here, the goal is to find (A
i
, B
i
) subsystems that build up a switched system capable of generating periodic or chaotic oscillations in
Each subsystem A
i
X + B
i
, for
As pointed out above, each matrix A i is such that the system (2) is dissipative, which implies that the sum of eigenvalues are negative. In this way the characteristic polynomial of (3) is given by
where
2.1 Two scrolls UDS
If we chose
With these parameters, the equilibrium points are located at (0.6286, 0, 0.6286) and (0, 0, 0), thus generating two scrolls as shown in Fig. 1.

2.2. Three scrolls UDS
If we add another equilibrium point, for example at (-0.6286, 0, -0.6286), we generate three scrolls, and its B vector is (see Fig. 2):

We are capable of generating more scrolls with this methodology if we add more equilibrium points as already stated in Ref. 14.
3. Multi-scroll Electronic Circuit
The proposed electronic circuit is based on the block diagram shown in Fig. 3, where v x is a feedback to state v z . The variables stated x, y, and z in the above equations are the same role as the potentials v x , v y , and v z in our electronic model.

The corresponding electronic diagram is implemented according to Fig. 4

Analyzing electronic circuit shown in Fig. 4, it is possible to get the following equations for node v A :
then
For state v y :
By manipulating Eq. (9), one obtains:
and the v z state equation is given by:
and therefore one obtains:
Finally, from (8), (10) and (12), the A matrix and B vector are determined to be:
According to Eq. (2), each matrix A i = A. For vector B, the block diagram is shown in Fig. 5. Fig. 5a) shows the case in which two scrolls are generated. The circuit works as follows: when the state v x is greater than 0.3 V, the comparator amplifier sets its output in high impedance and thus b 3 goes to 5 V; in the other case, when v x is less than 0.3 V the comparator amplifier output is grounded and thus b 3 takes a 0 volts value. Thus, in this way b 3 switched between 0 V and 5 V according to Eq. (5).
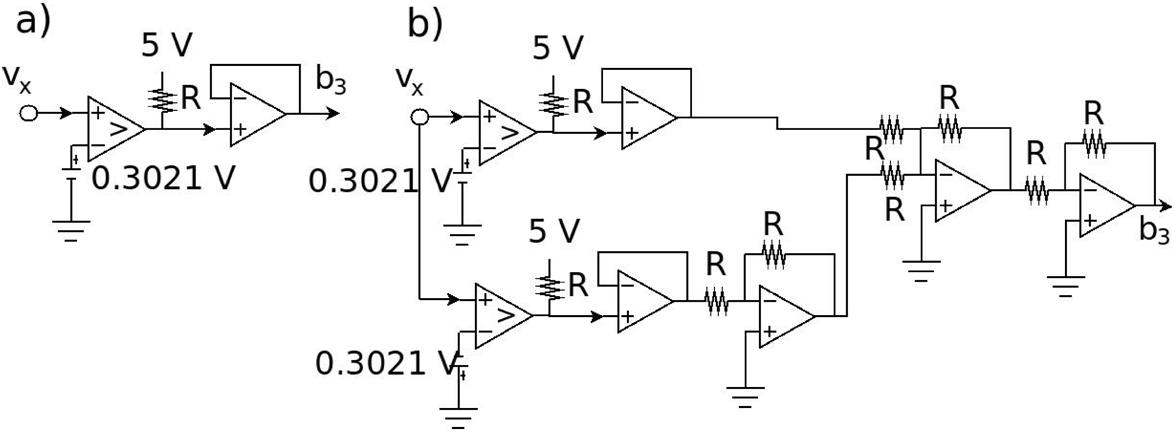
thus the B i vectors are given by (14) and (15). According to Fig. 5b), the operation mode is as follows. The upper comparator operates in the same way as described for the case in Fig. 5a). The behavior of the lower comparator amplifier is as follows: if state v x is less than -0.3 V , its output goes to high impedance (5 volts), otherwise takes 0 volts. The response of the two comparators and operational amplifiers is as follows: when state v x is greater than 0.3 V, b 3 is set to 5 V , or 0 volts if v x lies between 0.3 V and -0.3 V; finally the response is -5 V if v x attains a value less than -0.3 V. Accordingly, the response satisfies the following equation:
where, B i are given by Eqs. (14) and (16).
4. Experimental Results
The experimental results for a double-scroll attractor generated by the electronic circuit that corresponds to B i , with i = 1, 2 given by Fig. 5a) and described by Eq. (13), is shown in Fig. 6. The experimental time series are shown in Fig. 6a): the signal at the top corresponds to the v x state, the middle signal is the v y state, and the signal at the bottom is the v z state. Different projections of the attractor are shown in Fig. 6b) onto the v x - v z plane, c) onto the v x - v y plane and d) onto the v y - v z plane.

Figure 6. Double-scroll attractor: a) experimental time series of states. Different projections of the attractor on the b) v x - v z plane, c) v x - v y plane, and d) v y - v z plane.
Figure 7 shows the experimental results for triple-scrolls attractor generated by the proposed circuits of Figs. 4 and 5b), which behavior is described by (16). The experimental time series are shown in Fig. 7a): the signal at the top corresponds to the v x state, the middle signal is the v y state, and the signal at the bottom is the v z state. Different projections of the attractor are shown in Fig. 7b)v x - v z plane, c) v x - v y plane and d) v y - v z plane.

Figure 7. Triple-scroll attractor: a) experimental time series of states. Different projections of the attractor on the b) v x - v z plane, c) v x - v y plane, and d) v y - v z plane.
The components and values used to implement both, double-scroll and triple-scroll attractors, are given in Table I.

5. Conclusions
We have developed and implemented an electronic circuit based on what is called unstable dissipative system as proposed in Ref. 14, wherein the construction takes place through PWL systems in a three dimensional space. The PWL system is given by the commutation of B i vectors through one parameter, for which multiple scrolls are generated. The present work reports only double and triple scrolls but its generalization can be obtained in a similar way; to generate more scrolls in the proposed circuit, one has to modify vector B. In this way more equilibria are added to the system.

