











 nueva página del texto (beta)
nueva página del texto (beta) Español (pdf)
Español (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
1. Introducción
El chasis de un vehículo es la estructura base donde se ensamblan los demás componentes. Adicionalmente soporta cargas y ofrece una resistente protección en caso de coaliciones y volcaduras. En su diseño se sacrifican algunas cualidades para ganar otras, esto es, en la fabricación de un chasis existen tres parámetros fundamentales:
Ligereza. Mejora la potencia y rendimiento de un motor, pero debe ir acompañado de un chasis ligero, en otro caso se está desperdiciando potencia. Por otro lado, el chasis es uno de los elementos más pesados del vehículo, y un aumento de ligereza proporciona una disminución de consumo de energía.
Rigidez. Es la característica más importante del chasis. Una manufactura resistente a impactos es importante en la seguridad de sus ocupantes.
Economía. El chasis debe ser económicamente viable. La fabricación con presupuestos altos es únicamente empleada en series cortas de vehículos de gama especial [1].
La historia del chasis para vehículo, evoluciona casi a la par con la del automóvil, tanto de combustión interna como Vehículo Eléctrico (VE). Los primeros chasis eran de madera, hasta que vino el descubrimiento del hierro y el aluminio, para fabricar los primeros chasises en acero, de hecho, la evolución del automóvil comienza con los vehículos impulsados por vapor en el siglo XVIII. Karl Benz en el año 1886 solicitó la patente de un vehículo de tres ruedas, sin volante y una velocidad de 16 km/h, hoy se le reconoce como el primer automóvil del mundo producido en serie [2], su chasis estaba construido con una combinación de hierro y madera, el vehículo fue conocido como “Motorwagen”. Hay registros de que en 1976 José Caugnot, montó una máquina de vapor sobre un chasis, el cual se le puede considerar como primer automóvil de la historia, por otro lado, desde 1984 y hasta los años veinte, hubo un auge de los vehículos eléctricos [3].
La industria automotriz está sufriendo grandes cambios, debido a la urgente necesidad de contribuir en soluciones innovadoras y eficientes que permitan contribuir en la lucha contra la contaminación ambiental y así incursionar en el cambio climático.
El desarrollo tecnológico y científico en materia de VE, híbridos y sistemas de propulsión más eficientes y limpios, es cada vez más notable. Aunque se han logrado avances significativos, aún queda un largo camino por recorrer para alcanzar una movilidad y transporte verdaderamente sostenible y respetuosa con el medio ambiente.
En lo que respecta al VE, los esfuerzos en la investigación se concentran en cada parte del vehículo, desde la batería de ion litio [4], hasta la trasmisión mecánica de vehículo [5], por lo que es de suma importancia considerar la autonomía energética de los VE´s, en ello se ven involucrados la carrocería y chasis del vehículo.
En particular la batería requiere de un medio generador que las abastezca, generalmente en los VE´s, ésta depende de la red eléctrica urbana donde a menudo coexisten cuestiones políticas, sociales y naturales, tanto en su producción como en su distribución [6].
La Comisión Federal de Electricidad (CFE) es el órgano gubernamental principal proveedor de energía eléctrica en México, por ejemplo, en [7, 8, 9] se contemplan las perspectivas del sector energético en México hasta el 2025, pero no se vislumbran aspectos energéticos para los centros de carga de VE´s.
Por mencionar alguna deficiencia, de acuerdo con [7] hay alrededor de 500 puntos geotérmicos para producir electricidad y solo 4 de ellos están siendo explotados, aun cuando existen leyes internacionales de aprovechamiento de la energía como la tratada en [10], esto sin considerar la preocupación por el cambio climático que tanto afecta al medio ambiente [11], incluyendo el efecto invernadero debido a la gran contaminación, de los cuales los vehículos de combustión interna contribuyen en gran medida.
Durante la evolución del VE, se observan ciertos esfuerzos por obtener la autonomía mediante algunas fuentes de Integración Alternativas de Energía (IAE) [12] y [13], que incluyen los paneles solares integrados al vehículo [14] y [15], y/o el freno regenerativo relativo a los motores de cubo que van en las llantas y pertenecen al sistema de propulsión del chasis de un VE [16]. En este contexto la energía de los paneles solares, en México es poco explotada [15], aun cuando México es un País con mucha irradiación solar, en redes se puede encontrar reseñas donde los paneles solares sobre los toldos de la carrocería de VE´s permiten una autonomía hasta de 50km.
La generación de energía eléctrica fotovoltaica representa una de las alternativas para complementar la carga energética de las baterías de ion-litio, que como se sabe el carbonato de litio es el mineral principal para la construcción de estas baterías, y hay una euforia actual en el mundo por las reservas de litio [8].
México es un País que cuenta con los elementos principales para una gran fuente de energía sustentable como lo es el litio combinado siendo el principal componente de las baterías que puede ser alimentado con la energía de la irradiación solar, como principal soporte de energía sostenible.
2. Antecedentes
El primer chasis para vehículo se obtuvo en 1835, siendo Sibrindus Stratingh, quien lo diseño y su asistente Cristopher Becker quien lo construyo en Groningen, Holanda [17, 18]. Los primeros chasis para vehículos eléctricos utilitarios, según Chuncusig [19] fueron construidos por Thomas Davenport y Robert Davison en 1842, su funcionalidad fue limitada debido a que no tenían baterías recargables. Fue en New York, en 1897, cuando la primera aplicación comercial de chasis para vehículos eléctricos se desarrolló por la Electric Carriage y Wagon Company de Philadelphia, con la creación de una flota de taxis eléctricos, con un número de 100 unidades aproximadamente, ampliándose más tarde a otras ciudades norteamericanas.
Los chasis para los vehículos eléctricos fueron ampliamente utilizados A finales del siglo XIX, con la producción en masa de las baterías recargables, Los vehículos llegaron incluso a establecer un nuevo récord de velocidad de 106 kph en 1899 [20]. El desuso de VE´s particulares no significó la desaparición de los mismos en diferentes aplicaciones. Los taxis eléctricos fueron abandonados a mediados de 1920, [18, 21, 22]. Su chasis continuó fabricándose, pero para camiones eléctricos, comerciales e industriales, los cuales siguieron creciendo durante el año 1920 y en otras aplicaciones en 1930.
Renault con su primer chasis para su auto eléctrico en 1928, fue en los próximos, años las grandes marcas de automóviles que apostarían poco a poco por los vehículos eléctricos, seguido de Peugeot que, en el año de 1941, que fabricó 400 vehículos eléctricos con una autonomía de 80 km a una velocidad de 32 km/h [23]. En el año 1973 General Motors, desarrolló un vehículo eléctrico con cargador de baterías, el cual fue presentado en el primer Simposio de Desarrollo de Sistemas de Energía de baja contaminación [18, 17, 22].
En 1990 el CARB (California Air Resources Board) agencia del gobierno de California ocupada de la calidad del aire, aprobó la ley “Vehículo de emisión cero (ZEV)”, esta obligaba a las compañías fabricantes de automóviles a que dispongan de cláusulas de cero emisiones [19]. Así nace el modelo EV1, con una autonomía de 130 km, siendo un vehículo completamente eléctrico. De la misma iniciativa nacieron vehículos como el Toyota RAVEV, el Ford Think, el Nissan Altra EV, entre otros [24].
El diseño del chasis para un VE, no difiere mucho del diseño convencional de vehículos, no obstante, la versatilidad de los motores eléctricos disponibles para VE, hace que el diseño de chasis tenga varias observaciones que lo modifican, [5].
El considerar desde motores eléctricos de Corriente Alterna CA, de gran potencia, que requieren de sistema de refrigeración tanto para el motor como para el sistema energético [25], hace necesario un compartimiento para albergar los sistemas de refrigeración; hasta motores eléctricos de cubo de baja y mediana potencia que van colocados en las llantas y por esta disposición ocupan poco espacio.
Razones como estas, hacen que la selección del motor eléctrico sea una parte importante en el diseño del chasis del VE. Los motores de cubo originalmente se diseñaron para VE de dos ruedas [26], pero actualmente se han popularizado bastante, y ya se están implementando en VE de tres y cuatro ruedas. En [27], se puede ver una investigación exhaustiva sobre características principales en la selección de un motor para VE, en particular para el diseño de chasis para un VE urbano ligero, con normatividad europea puede verse en [28], y la fabricación de un VE con autonomía por energía solar en [29].
Centros de investigación en universidades y laboratorios se están dedicando a la investigación sobre la autonomía de VE, algunos se están concentrando en la optimización del motor eléctrico, en general está habiendo una evolución en lo que respecta al cambio de motor de combustión interna a motor eléctrico en los automóviles, evolución que data desde 1832, esto es casi a la par con la evolución del motor a combustión interna.
La investigación sobre integración de fuentes energéticas a la carrocería de VE, también es un tema de vanguardia, Toyota presentó un VE, con celdas fotovoltaicas colocadas en el toldo del VE [14], estas complementan la generación de energía que requiere la batería de litio para la autonomía del vehículo. Tesla motor´s en [30], presentó un VE con una de las primeras formas de disposición de las baterías en el chasis y la implementación de freno regenerativo en el motor [16], estas dos características innovadoras del VE, son consideraciones importantes en el diseño del chasis. En general, para obtener un VE urbano ligero, deben cuidarse los detalles en su diseño y fabricación [28].
En este artículo se presenta el diseño del chasis para la propuesta de diseñar y fabricar un VE austero, que permita una movilidad urbana de forma práctica, económica y sustentable, el chasis deberá ser diseñado para montarle una carrocería de fibra de vidrio que lleva paneles solares integrados. El diseño requiere de un chasis adecuado que sea compatible con materiales ligeros, pero a su vez resistente para transportar el peso del vehículo para un pasajero, máximo dos pasajeros, en el menor espacio posible, observando algunas normas de ergonomía y seguridad como las presentadas en [9], [31] y [32].
Así, se empieza con un diseño innovador, que tenga dimensiones menores a las habituales, permitiendo mayor ligereza de carrocería y chasis, lo que se traduce en economía, mayor potencia de los motores eléctricos para la movilidad, esto es transporte y fácil aparcamiento en ciudades altamente congestionada, etc.
3. Materiales y métodos
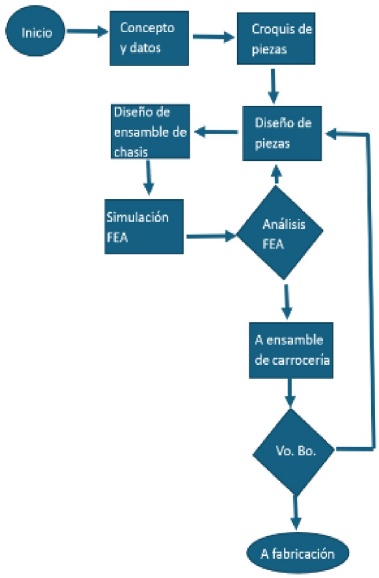
Se usará la metodología de diseño de sistemas, para lograr el objetivo del diseño del chasis, donde se incluyen diseño de cuadro base del chasis, diseño del sistema de suspensión, diseño de sistema dirección, diseño de sistema de potencia y diseño de ubicación de accesorios, todo para integrarse a una carrocería para un VE, se procederá siguiendo el diagrama de flujo de Figura 1.
3.1 Conceptos, datos y bosquejos
Se inicia con la recopilación de información, para obtener las especificaciones y datos del vehículo a diseñar, en el que se incluye el chasis como parte fundamental de este trabajo:
Investigación sobre los VE pequeños existentes en el mercado, y diferentes mecanismos de trasmisión mecánica, incluyendo costos, usos, y autonomía. La mayor parte de VE para uso urbano, es de fabricación China, con motores de baja potencia, generalmente con eje de trasmisión, cupo para máximo tres pasajeros, dimensiones por ejemplo de 220 cm x 110 cm x 135 cm, como el Kiwo [33], mostrado en la Figura 2, con especificaciones mostradas en Tabla 1.
Tabla 1 Especificaciones del VE Kiwo [33].
| Motor: | MZ-60V-1200W |
| Potencia Máxima: | 1200W |
| Autonomía: | 60 km |
| Batería: | Batería de ácido 60V-5ah |
| Freno delantero: | Disco |
| Freno trasero: | Disco |
| Suspensión | Electrónica |
| Rueda trasera: | 5.00 R12 |
| Rueda delantera: | 120/70-12“ |
| Número de pasajeros: | 3 |
| Sistema de interrupción: | Interrupción de disco |
| Largo x ancho x alto: | 220 x 110 x 135 cm |
| Carga máxima: | 300kg |
| Tiempo de carga: | De 6 a 10 hrs. |
| Peso del vehículo: | 100 kg |
| Velocidad máxima: | 40km/h |

Investigación sobre motores de cubo para la propulsión mecánica de VE. Para reducir espacio se optó por usar motores de cubo, los cuales van en las ruedas del vehículo, eliminando la necesidad de caja de trasmisión, ahorrando espacio, que puede ser usado para los pasajeros, esto permite disminuir aún más las medidas del vehículo. Además, la investigación apunta una tendencia mundial de utilizar motores de cubo para VE de baja velocidad, de acuerdo a [34].
Ya que la finalidad es obtener un VE austero y económico para uso urbano, el reducir el tamaño del VE, y eliminar algunos componentes mecánicos como la trasmisión, resulta un vehículo de menor peso, el cálculo a priori, es un vehículo de unos 100 kg de peso, por lo que dos motores de cubo de 350 a 500W pueden mover el vehículo a velocidad moderada, en analogía con 2 vehículos de dos ruedas como dos bicicletas eléctricas. Estas estimaciones a priori, permiten obtener los primeros datos para las dimensiones del vehículo, y comenzar a esbozar los bosquejos del cuadro del chasis.
Se estudiaron los diferentes sistemas mecánicos del VE, para bosquejar los sistemas como dirección y suspensión. Existe una gran cantidad de sistemas de suspensión [35], las más sencillas son las suspensiones rígidas, mientras que la suspensión delantera más usada es la suspensión McPherson, que resulta ser una modalidad de la suspensión de horquillas.
Por otra parte, el sistema de dirección más utilizado consiste de cremallera y brazos tipo Pitman. Se puede obtener una lista de los coches eléctricos más pequeños: guía con los mejores coches para moverse por ciudad, ver [36], el más pequeño de este reporte es el Fiat 500e, con 3.63 m de largo.
No obstante, el mercado Chino e Hindú ofrece VE, mucho más pequeños como el flybo 6000ZX, el mahindra [37], o vehículos recreativos aún más pequeños como el Kiwo que se ofrece a precio muy económico en almacenes comerciales. Como este VE, se ofrecen muchos otros en el mercado.
En la Tabla 2 se resumen las especificaciones y datos para el diseño del VE austero, que serán corroborados en el proceso del diseño.
Tabla 2 Especificaciones para el diseño del VE.
| 2 motores tipo cubo | 36V-350W |
| Potencia Máxima: | 700W |
| Suspensión frontal | Horquillas |
| Velocidad máxima: | 60km/h |
| Freno delantero: | Disco |
| Freno trasero: | Disco |
| Ruedas | R10 |
| Suspensión trasera | Muelles |
| Batería: | Ion litio de 36V. |
| Cubierta | Descapotable |
| Largo x ancho x alto | 200 x 100 x 120 cm |
| Carga máxima: | 150 kg |
| Tiempo de carga: | De 2 a 4 hrs |
| Número de pasajeros: | 1 máximo 2 |
| Peso del vehículo: | 100 kg |
Las especificaciones de Tabla 2, se obtuvieron observando las normas de ergonomía y seguridad análogas a las que se consideraron para el vehículo utilitario en [31], pero en particular la norma Mexicana NOM-068 para condiciones físico mecánicas y de seguridad, ver [9], y para los espacios se tomó en cuenta la norma internacional descrita en [32].
3.2 Diseño de Piezas.
3.2.1 Diseño del cuadro base.
En función a la recopilación de datos, y cálculos preliminares y considerando la norma para medidas del cuerpo humano, ver [38], aplicada a la estatura del humano adulto, promedio en Países latinoamericanos es de 1.70 m, se obtuvo el boceto de Figura 3, que servirá como base para determinar el cuadro del chasis.
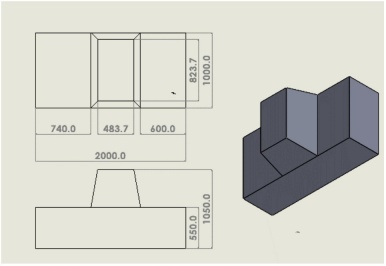
Este cuadro es la base del VE, mide 1 x 2 m, considerando la holgura de la carrocería que será instalada sobre el chasis, el cuadro de chasis es de 1.86 x 90 cm. Se usó software de CAD, para los dibujos en 2D y 3D, obteniendo el cuadro base de chasis representado en la Figura 4. Ahí puede verse que la parte delantera considera los soportes únicamente para las horquillas de la suspensión, en el centro del cuadro se observa el soporte para un asiento largo para la comodidad de una persona de acuerdo a los datos que arrojaron los cálculos considerando la norma para medidas del cuerpo humano [38]. En la parte final se restringe el cuadro para contener los motores de cubo, con suficiente espacio para dar alternativas al usuario de optar por algún motor de más potencia, en particular para los motores más austeros seleccionados, fueron de 350 W, el sistema de suspensión trasera austera, seleccionada será de muelles.
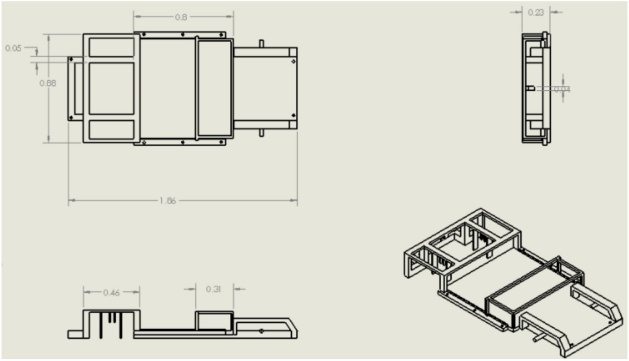
En la Figura 5, se aprecian las dimensiones que deben llevar, tanto el cuadro base de chasis como la posición de los diferentes soportes de los sistemas periféricos del chasis.
3.2.2 Diseño de sistema de suspensión
Existen diferentes tipos de suspensión, de acuerdo a [39] se puede elaborar una clasificación general.
Analizando su funcionalidad y el espacio que ocupa cada una de las suspensiones de la Tabla 3, se decide por una suspensión delantera independiente de horquillas superior e inferior, y un diseño de suspensión rígida de muelles comerciales para la suspensión trasera.
Tabla 3 Clasificación general se suspensión
| Suspensión | Ubicación |
| Rígida con muelle | Trasera |
| R. con amortiguador | Trasera |
| Barra Panhard | Trasera |
| Semi Rígida Dion | Trasera |
| S. rígida Dion y muelle | Trasera |
| Eje torsional | Trasera |
| Horquillas | Delantera |
| Eje oscilante | Delantera |
| McPherson | Delantera |
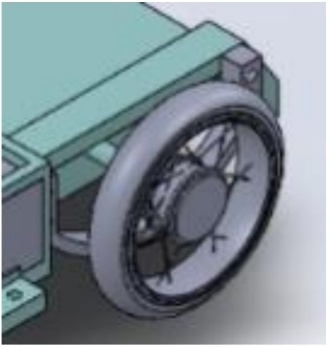
Las piezas que comprenden el sistema de suspensión delantera de horquillas son: Horquilla superior, horquilla inferior, amortiguadores, y masas para sujeción de llantas delanteras. El diseño de la suspensión delantera se puede ver en la Figura 6, donde se incluye una rueda del vehículo y la varilla de brazo Pitman para unirse con el sistema de dirección.
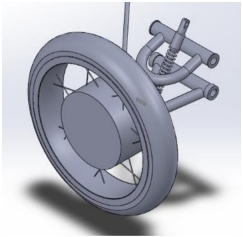
El esquema representa como alternativa, un posible motor de cubo para llantas delanteras, con el fin de incrementar potencia deseada en el vehículo.
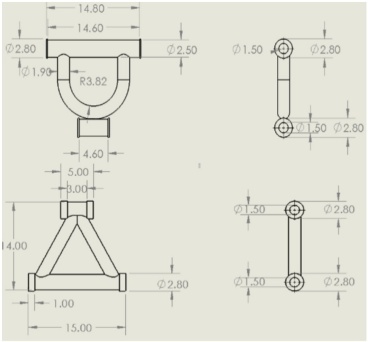
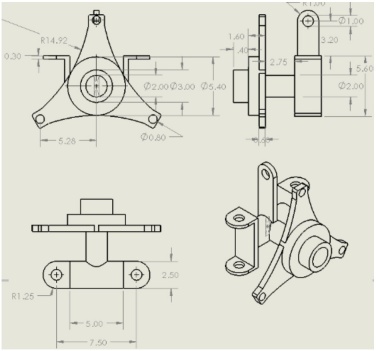
En los planos de la Figura 7 y 8 se pueden apreciar las dimensiones de las horquillas y de las masas que son los principales componentes del sistema de suspensión delantera. Los amortiguadores se consideran de adquisición comercial.
El diseño de la suspensión trasera se reduce a una simple representación esquemática, ya que esto se consideran aquí, de adquisición comercial.
3.2.3 Diseño de sistema de dirección
El sistema de dirección es el encargado de hacer girar las ruedas delanteras sobre su punto de apoyo, con la finalidad de dirigir el vehículo. Existen varios tipos de dirección, que van desde una simple palanca mecánica, hasta sistemas modernos electrónicos y asistidos por computadora.
Considerando que el diseño del chasis es para un VE austero y económico, se optó por el sistema mecánico de cremallera, que resulta muy simple, económico y eficiente.
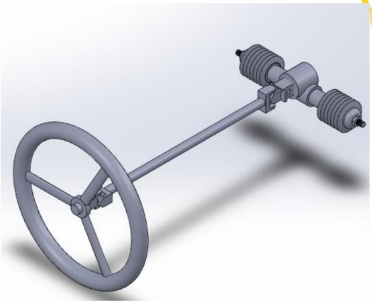
Las piezas que comprenden el sistema de dirección para el VE austero son: Volante, eje de volante, nudos, cremallera y barras de dirección, casi todos ellos son de adquisición comercial, no obstante, aquí se bosquejan los diseños de estas piezas.
En la Figura 9 se aprecia el ensamble del volante, el eje de volante, el nudo y la cremallera, en ese orden.
3.2.4 Diseño electrónico y de potencia
Los motores de cubo, son motores trifásicos sin escobillas, generalmente de CD, aunque su uso se ha popularizado para VE de dos ruedas, los motores de cubo también se están usando para vehículos ligeros de 4 ruedas, y para vehículos pesados como autobuses principalmente urbanos. El crecimiento de los motores de cubo para VE es de una tasa anua del 6.15% [34].
El diseño del chasis contempla dos motores de cubo de 350 W, con un voltaje de 36 V cada uno, integrados en las ruedas traseras, esta consideración se tomó, en base a las especificaciones de diseño del VE que son de tamaño pequeño con un peso máximo de 100 kg, para transportar una carga máxima de 150 kg.
La potencia que se obtiene con estos dos motores de aproximadamente 1 hp, suficiente para mover el vehículo a una velocidad máxima de 60 Km/h, considerando que la normatividad de circulación urbana en México no excede los 50 Km/h, ver [40].
Es común usar la relación potencia/peso, la estimación a priori para el diseño del vehículo austero se tomó en función a la relación potencia/peso que tiene el Kiwo,
donde R es la relación, P la potencia y C la carga.
De Tabla 1, el peso máximo del Kiwo es de 400 kg, incluyendo el peso del vehículo de 100 kg y la carga máxima de 300 kg. El motor tiene una potencia de 1200 W, así la relación es 𝑅 = 3 W/kg.
Entonces el VE austero a diseñar con un peso máximos de 250kg, esto es 100 kg de peso estimado de vehículo y carga máxima de 150kg, tendrá una potencia de 750 W, de acuerdo a:
Un VE urbano debe ser de dimensiones cortas, a fin de disminuir problemas principalmente de contaminación ambiental y congestión vial, además de que esto contribuye en la economía del costo del vehículo, ya que es sabido que los VE resultan ser más caros que los de CI [2], pero con contaminación ambiental nula, la contaminación vial, se reduce principalmente por el hecho de ser pequeños, permite fácil acceso en calle estrechas y escasos lugares de aparcamiento, problema típico en ciudades Europeas y Latinoamericanas.
El diseño de compartimentos puede observarse en la Figura 4 y 5 del cuadro base de chasis. Los motores van alojados en los rines de las llantas, los controladores y batería van alojados debajo del asiento.
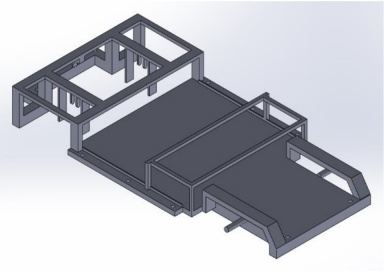
3.3 Diseño de ensamble de chasis
Una vez que se ha diseñado cada pieza se procede a elaborar el diseño de ensamble de chasis, este se hace con la misma herramienta de CAD, usando el módulo de ensamble de piezas. Manteniendo la relación de posición que guarda cada pieza con el respectivo ensamble. En la Figura 11, se presenta el ensamble completo del chasis, en el que se incluyen los sistemas periféricos, el sistema de dirección, el sistema de suspensión y el sistema de potencia.
El diseño de la base tiene las siguientes características: La parte frontal sigue un diseño para poder sostener las horquillas de la suspensión delantera, donde se puede observar un sistema de amortiguamiento, esto es un amortiguador que sube y baja por entremedio de la horquilla en forma de U. Los planos de Figura 7, muestran las dimensiones de las horquillas inferior y superior, la parte que mide 5 cm, y 4.6 cm respectivamente, se ensamblan sobre sus respectivas uniones con la masa.
La parte que mide 15 cm y 14.8 cm respectivamente se ensamblan en sus respectivos soportes del chasis, juntamente con un amortiguador y llanta delantera, formando el sistema de suspensión delantera, como se aprecia en Figura 11.
La saliente entre medio de las masas, que tiene un orificio, conecta la barra de la cremallera del sistema de dirección. En esta parte delantera se observa una barra para soportar el volante y en la parte inicial de la base otras dos barras que sirven como defensa para la seguridad en caso de impactos.
En esta misma Figura 11, puede verse el compartimiento debajo del asiento, para el sistema electrónico que incluye los controladores y baterías, así mismo se esquematizan los motores de cubo en los rines de las llantas, con la opción hasta de 4 motores uno en cada llanta.
3.4. Diseño simulación y análisis FEA
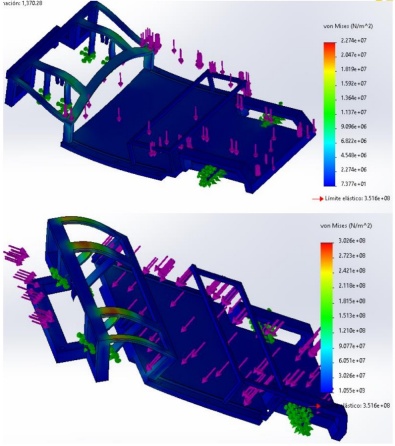
Una vez obtenido el diseño en CAD del chasis, se hace un análisis, preliminar de los elementos finitos (FEA), en el mismo software, este análisis preliminar es para determinar si el material y dimensiones son los adecuados, se consideró material acero estructural AISI 1020 y dimensiones que se detallan en los planos de Figuras 5 y 7.
La carga máxima de 250 kg, que se dan para el análisis estático con un factor de seguridad de 1.2 fue de 300 kgf. Esto es caso estático 𝐹 = 𝑚𝑔 = 300 kgf distribuidos en el piso, y fijo en los soportes del sistema de suspensión.
Se consideraron 500 kgf, en la carga, para la simulación del caso dinámico, esto es incluyendo el peso del vehículo y tomando el factor de 1.66 por los efectos de la cantidad de movimiento vertical, considerando efectos de amortiguamiento.
Si se toma cantidad de movimiento horizontal del peso completo, esto es en caso de impacto de prueba alcanzando una velocidad de 60 km/h en un tiempo de 0.56 s, tenemos una carga de 14880 N, de acuerdo a:
Aproximando a 1500 kgf se obtienen los siguientes resultados.
Como puede observarse en la Figura 12, en ninguno de los dos casos se alcanza el límite elástico de 3.5x108 Pa. No obstante, se alcanza a apreciar que la parte más comprometida del chasis son las barras de soporte de la suspensión delantera. Entonces en un rediseño de optimización, después de los resultados aerodinámico, deberá reforzarse esta parte del chasis.
4. Resultados
En la Figura 11, se presentó el diseño completo del chasis con motores de cubo en las llantas traseras. En la Figura 12 se presentó la simulación en computadora para un análisis de esfuerzos y deformaciones. Para ello se consideró acero comercial y cargas extremas, obteniendo buenos resultados en la simulación de los esfuerzos.
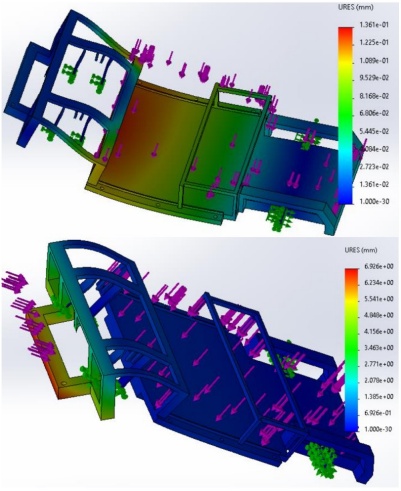
En la Figura 13 puede verse que la deformación es mínima, en el caso estático la máxima deformación se tiene en la base del chasis con apenas 1.3 mm. Mientras que en el caso dinámico la máxima deformación se alcanza con 7 mm, en la defensa por la simulación del impacto.
4.1 Costos para el diseño del chasis
En esta subsección, se presenta la Tabla 4, con los costos de los materiales para la fabricación del chasis, sin considerar mano de obra.
Tabla 4 Costo de materiales para el chasis de VE.
| C | Descripción | Costo U | Total |
| 3 | PTR C11 1.5”x 1.5” | $ 567.00 | $1701.00 |
| 1 | Solera 2”x3/8” | $ 835.00 | $835.00 |
| 1 | Tubo de –” ced 20 | $ 355.00 | $355.00 |
| 2 | Amortiguadores | $ 472.50 | $945.00 |
| 1 | Cremallera sinfín | $1012.25 | $1012.25 |
| 2 | Muelles | $ 1020.00 | $1020.00 |
| 2 | Motores de cubo 350w | $ 2500.00 | $5000.00 |
| 2 | Masas delanteras | $ 472.50 | $945.00 |
| 2 | Brazos Pitman y rotula | $ 235.00 | $470.00 |
| 2 | Controladores | $ 245.00 | $490.00 |
| 1 | Acelerador de pedal | $124.00 | $124.00 |
| 1 | Batería de 36 V 200wh | $ 1499.00 | $1499.00 |
| 4 | Llantas R10, con rin | $ 1215.00 | $4860.00 |
| 1 | Volante con eje y nudo | $ $575.00 | $ 575.00 |
| Tornillería accesorios | $ 850.00 | $ 850.00 | |
| Consumibles | $ 850.00 | $ 850.00 | |
| Total | $21531.25 |
4.2 Ensamble sobre diseño de carrocería.
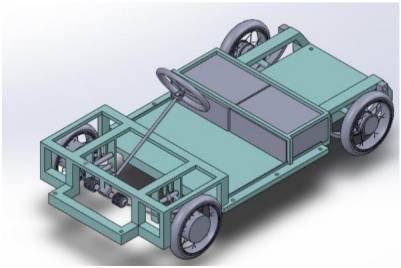
Obtenido el diseño preliminar del chasis con todos sus sistemas periféricos se ensambla sobre un diseño de la carrocería previamente elaborado (no contemplado en este trabajo).
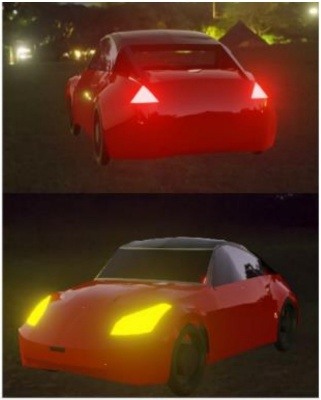
La Figura 14, muestra el diseño final del VE, para el cual fue diseñado el chasis con motores de cubo.
5. Discusión
El diseño del chasis con motores de cubos, se realizó para una carrocería de VE austero y económico, con ello, se espera conseguir autonomía energética, mediante paneles solares y freno regenerativo para alimentar baterías de litio que a su vez darán energía a los motores de cubo. De acuerdo con el diagrama de flujo del proceso de diseño del VE, Figura 1; el diseño del chasis con motores de cubo, fue un prediseño, ya que el siguiente paso en este proceso es un análisis aerodinámico FEA, con un modelo de fluido estructura análogo al que se hizo en [41]. Este análisis, dictará posibles nuevas cargas o mínimos cambios en el diseño del chasis, para optimizar el diseño. No obstante, los factores de seguridad que se manejaron en el análisis estructural y el margen que arrojó, permiten visualizar a priori que el diseño no tendrá problema en cuanto a grandes cambios en su optimización. Los costos que se manejan en la Tabla 4, son solo de materiales para la fabricación del chasis, falta considerar costos de manufactura, costos de la carrocería, costo de accesorios como freno hidráulico, luces, asientos, ventanas, bocinas, etc., para tener una idea del costo total de fabricación de prototipo de VE. Claramente el costo se reduce cuando se refiere a producción en masa.
6. Conclusiones y recomendaciones
En este trabajo se logró la investigación completa de los vehículos pequeños y motores eléctricos de cubo, que inspiraron el diseño completo en 2D y 3D virtual, en computadora de la base y de los sistemas de suspensión, dirección y de potencia que conforman el chasis con motores de cubo para un VE. Se consideró dimensiones y materiales adecuadas para el diseño de un chasis para VE austero y económico para circulación urbana. Las dimensiones permitirán un movimiento apropiado en ciudades con problemas de congestionamiento de tráfico vehicular.
Se establecieron los planos para manufactura de cada pieza de los sistemas del chasis, con la opción de alguna pieza, como las masas, los amortiguadores y el volante, a compra, por ser de dimensiones y especificaciones comerciales. Así mismo con los motores de cubo y toda su electrónica, incluyendo baterías y posiblemente rines y neumáticos. Se indicaron algunas normas seguridad y vialidad [40], incluyendo análisis de resistencia y deformación de FEA por impacto, se referenciaron algunas normas de seguridad y ergonomía como las observadas en [31], así mismo se analizó los espacios en función a las normas para carrocería de [32], las dimensiones estándar de cuerpo humano [38], etc.
El trabajo fue realizado a la par con el diseño y manufactura de carrocería [9], adecuado para este chasis, en el VE se integrarán fuentes de energía alternativa para la trasmisión mecánica del vehículo. Finalmente, como trabajos futuros y como complementó en la fabricación de un VE urbano, práctico y económico, restaría investigar sobre accesorios como frenos, asientos manuales, ventanas y espejos manuales, etc., con un enfoque austeros, que permiten dar mayor economía y a su vez autonomía al vehículo.

