











 texto en
texto en  Inglés (pdf)
Inglés (pdf)
 Artículo en XML
Artículo en XML Referencias del artículo
Referencias del artículo
 Enviar artículo por email
Enviar artículo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
Introduction
Intensive crop production requires many mechanical and technological operations that consume energy for crop establishment, pest control, irrigation, transport and storage (Imran et al., 2020; Šarauskis et al., 2020). Particularly, tillage operations could spend between 29 to 59 % of all fuel used in the production system (Šarauskis et al., 2017).
The agricultural tractor has been designed to pull implements by performing traction by means of its wheels; when making traction, wheels turn without travelling the distance that in theory they should do according to their perimeter, this is called slippage (Zos & Grisso, 2003). During the tillage operations, slippage should be between 5 to 15 %. When it exceeds 15 %, it causes damage to the soil surface, and increases fuel consumption and excessive wear of the traction tires (Šmerda & Čupera, 2010; Moitzi et al., 2014). Kumar et al. (2017) indicates that up to 50 % of energy delivered by the tractor could be wasted by the slippage excess. Methods to adjust the slippage of agricultural tractors are control systems of the draft force and depth control of implements, ballast, ultra-flexible tires, and tire pressure adjustment (Čiplienė et al., 2019).
Slippage is affected by the moisture content at the soil surface, the type of soil cover, working depth of the implements and surface roughness. All these factors vary in the field so, it is required a measurement system that can deliver slippage readings inline in order to adjust the configuration tractor-implement to maintain the slippage in the optimum range (Gupta et al., 2019).
Slippage measurements of agricultural tractors are mainly performed in the activity of testing and evaluation of implements by using a standard manual method (Smith et al., 1994). This standard method is appropriate for small plots, but mechanical and electronic equipment is required for bigger extensions where large amount of slippage data as well as working depth and speed rate had to be collected and processed automatically, which influence the tractive efficiency (Shafaei et al., 2019). Romantchik-Kriuchkova et al. (2015) equipped a tractor with a fifth wheel, rotation sensors and automated data acquisition system, to quantify the revolutions of the fifth wheel and the rear tractor wheels to the calculate slippage and determine the working areas for a tractor with the same loads applied in a 4x4 and 4x2 traction schemes.
Pranav et al. (2012) reports that when measuring slippage with mechanical or electronic devices, it is difficult to measure the current speed and slippage of the tractor. Several authors have developed electronic devices to measure the relationship draft-slippage (Gupta et al., 2019) and the relationship slippage-fuel consumption (Kumar et al., 2017). Therefore, the aim of this study was to design, assemble and evaluate an encoder-based tractor slippage measurement system. In addition, the efficiency of the proposed system was evaluated under laboratory and field conditions, using the standard manual method as a reference.
Materials and methods
Location and characteristics of the experimental site
The experimental work was carried out at the facilities and experimental station of the Universidad Autonoma Agraria Antonio Narro located in Buenavista, Saltillo, Coahuila Mexico (100° 59’ 57” W and 25° 23’ 42” N, at 1 743 m a. s. l.). The soil texture of the experimental site is a clay loam 34.1 % clay, 33.4 % silt, 32.5 % sand and 2.09 % of organic matter. The climate is dry-arid with a mean annual rainfall of 435 mm and 16.9 °C of annual mean temperature.
Design, components and integration of the system
Tire slip of a two-wheel drive (2WD) tractor is quantified by the difference of the distance travelled by the traction (rear) tires when the implement is working (loaded) and unloaded, this according to Equation (1) (Smith et al., 1994).
where S is tire slippage (%), Dul is the distance travelled by traction tires unloaded (m) and Dl is the distance travelled by traction tires loaded (m). In the manual standard method, the distances Dul and Dl are measured in two separate times, then the slippage is calculated.
To replace the manual measurement that are made when evaluating agricultural implements, it was considered to integrate electronic components in a system to measure the equivalents of Dul and Dl and from that to calculate the slippage.
Figure 1 shows the components of the slippage measuring system. The basic components are the encoders that count the turns, one encoder of 500 pulses (LPD3806-500BM; 500 P/R1, China) is attached to the rear wheel. To measure the turns of the front wheel an encoder of 400 pulses was used (LPD3806-400BM 400 P/R, China).

The digital signals generated by the wheel turns are stored in the data acquisition system DaqBook 2000 (IoTech, USA) and processed with the DaqView software (IoTech, USA) as .txt files. The DaqBook is connected to the PC and to the tractor's onboard computer with Minitab and Excel software, where the calculated slippage can be monitored.
With this automated method, measurement and calculation of slippage (S, %) of the traction wheels was carried out on the fly (Equation 2). Distances required were measured with the encoders as follows: 1) the actual distance (Ad, m) traveled by the tractor with the implement was calculated from the front wheel turns measured with the encoder and 2) the theoretical distance (Td, m) that the tractor should travel with no slippage, found from the rear drive wheel turns measured with the encoder.
Test and calibraion of the system in laboratory
System calibration was carried out in the laboratory to generate two equations (one for each encoder) for the calculation of the distance travelled by the rear wheels and the front wheels. The encoders were tested to verify and record the number of pulses per turn. The signals were stored in the DaqBook 2000 and processed in a PC. Five tests were performed with 10 replications each, and an average number of pulses per turn was recorded from the results collected.
With the radius of the rear and front wheels of the tractor, Td (Equation 3) and Ad (Equation 4) were calculated:
With the pulses per wheel turn measured in the laboratory and the distance per turn, a database was developed relating the number of pulses with the distance for the rear and front wheels. With that information, a lineal regression (Figure 2) was performed using the software Minitab and two equations were generated, one for the rear wheel encoder pulses (Equation 5) and one for the front wheel encoder pulses (Equation 6).
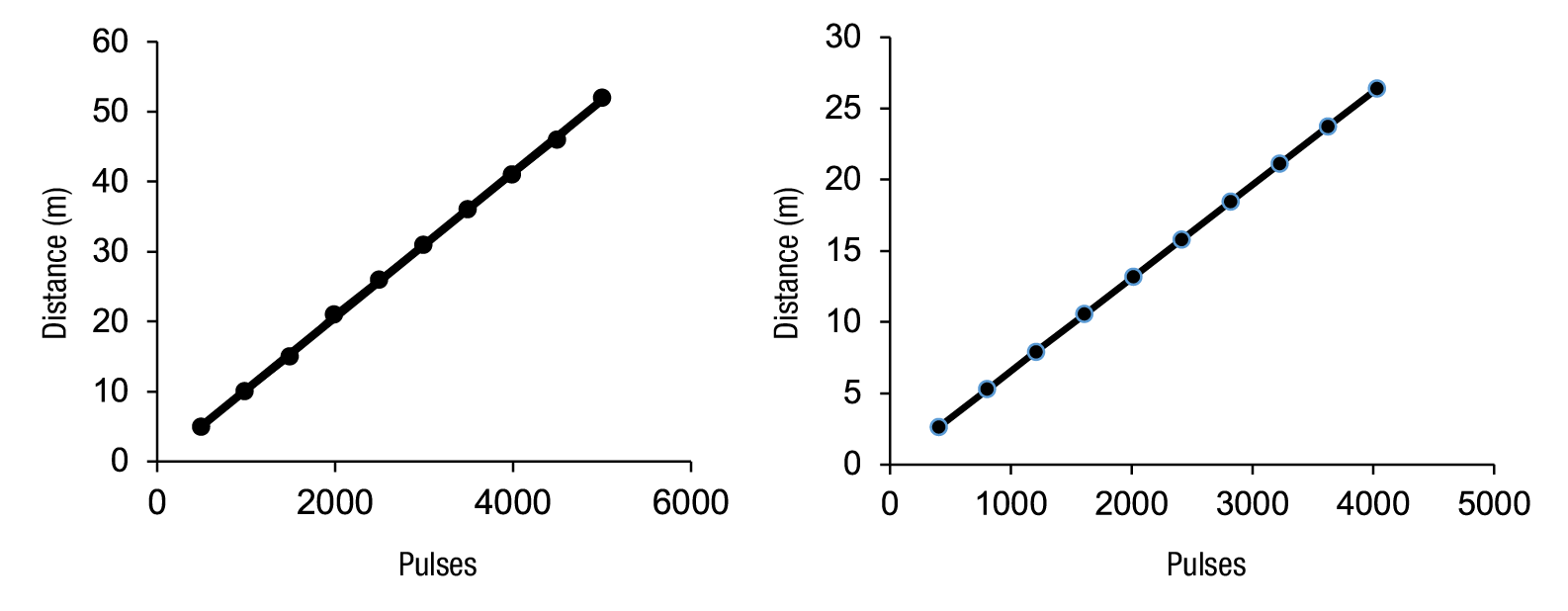
Figure 2 Graphs and equations of the relationship of pulses and distance for the rear wheel (left) and the front wheel (right).
Validation test of the system on surface of asphalt
The system for slippage measurement based on encoders was installed in a John Deere tractor (model 6 403, 2WD) with a rated engine power of 73 kW. Gross weight of the tractor is 5 590 kg and the front to rear weight distribution is 35 and 65 % (Figure 3).

To verify the performance of the measurement slippage system on a hard surface, tests were conducted on asphalt. For this purpose, a randomized block experiment was set up with five distances as treatments (20, 40, 60, 80 and 100 m); each treatment was replicated four times. All trials were conducted at a travelling speed of 5.65 km·h-1 and runs started from 0 km·h-1. The system was reset by an operator after each run to label them.
System trials with tillage implements
To validate the performance of the system under field conditions, three tractor runs were made using different tillage implements (Figure 3). First, the slippage was measured when working with a JD645 plow with four smooth discs (711 mm diameter and 6.55 mm thick each, with a total weight of 642 kg). The second test was made by working with a JD610 chisel plow with eight “C” type chisels and a total weight of 618 kg. Both implements have a three-point link attachment category II. The travelling speed was 5.65 km·h-1. The condition of the soil surface (top layer from 0 to 5 cm) of the trial plot had a penetration resistance of 1 045 kPa and 5.85 % of volumetric water content.
Comparison of slippage measurements results from the manual method and the systems based on encoders
The comparison of the measurement methods was carried out on four tractor runs with the disk plow already described. Slippage was measured simultaneously with both methods, and the standard manual method (Smith et al., 1994) was used as a reference. For the standard manual method, ten turns of the rear (traction) wheels are counted with the implement lifted, and the distance (Dul) is measured with a tape measure. For the Dl, ten-wheel turns were also counted, but with the implement working, then the distance was measured with a tape measure. Slippage with an encoder-based system was calculated with the data recorded when the implement was working.
Evaluation of an encoder-based system at different soil moisture content
For this purpose, a field experiment was established with a randomized block statistical arrangement. The treatments were four levels of volumetric soil moisture (15, 25, 35 and 40 %) with six replicates each. The experimental units were 1 m wide by 100 m long. Traction tires were ballasted with water up to 75 % of total volume, the rest was air until pressure reached 207 kPa. Mean soil resistance in the surface layer (0 to 5 cm) was 1637 kPa and soil cover was about 80 %, and dry matter was 3.47 Mg·ha-1.
Depth and working speed of the disk plow (0.15 m and 4.5 km-h-1, respectively) were kept constant so that the only factor affecting slippage was soil moisture content. The soil was irrigated with a sprinkler system until surface saturation was reached, and then left to dry out until the moisture levels of the treatments were achieved. The monitoring of the soil moisture content was made with a TDR probe (TDR 300, FieldScout®, EUA).
Analysis of variance and Tukey's mean comparison test (P ≤ 0.05) were performed using the statistical software InfoStat v2018.
Results and discussion
Validation test of the system on surface of asphalt
Table 1 shows that slippage obtained on the asphalt surface are close to zero, which occurs when the tractor makes minimal traction, just to move forward with the implement lifted in a hard surface (Zoz & Grisso, 2003). According to these results, the only value with significant differences was the slippage measured at 20 m. Slippage in short runs (20 m) is not the best condition because starting from 0 km·h-1 the target speed is not well established over short distances.
Table 1 Percentage of slippage measured at different distances on a surface of asphalt.
| Distances (m) | Slippage (%) |
|---|---|
| 40 | 1.45 az |
| 100 | 1.37 ab |
| 60 | 1.30 ab |
| 80 | 1.05 ab |
| 20 | 0.72 b |
zMeans with the same letter are not statistically different (Tukey, P ≤ 0.05). Standard deviation = 0.39, mean = 1.18.
The results obtained on this hard surface are an indication that the system works correctly measuring the distances and calculating the percentage of slippage under this condition.
Trial of the system with tillage implements
The results of the validation of slippage measurements working with two tillage implements are shown in Figure 4. The differences in the values found were mainly due to variations in working depth (0.25 m for the disk plow and 0.14 m for the chisel plow), since more traction (generating more slippage) was required to pull the disk plow. Differences on working depth also depends on the weight of the implement (Olatunji et al., 2009); in this case the disk plow was heavier than the chisel plow under the same condition of soil resistance.
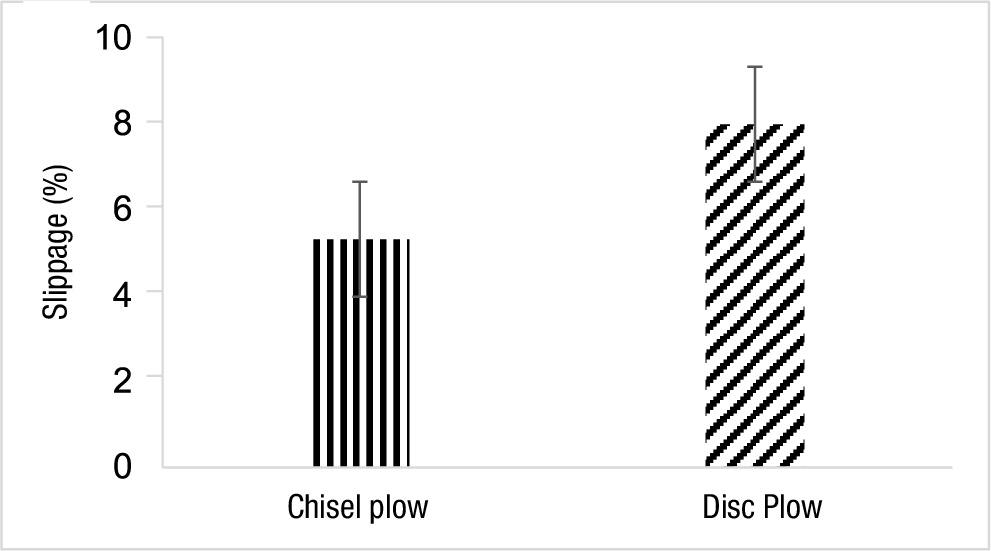
The results of the measurements are in accordance with the type of implement. The disk plow demands a greater traction force compared to the chisel plow (López-Vázquez et al., 2019); therefore, slippage was greater with the disk plow. With the chisel plow, slippage values obtained reported were more uniform. This could be because with this implement it was possible to set and maintain, with small variations, the working depth.
Comparison of slippage measurements results from the manual method and the systems based on encoders
There is small difference in the values that result from the measurements made with the manual method of reference (Smith et al., 1994) and the encoder-based system. Figure 5 shows the mean values of five runs measured simultaneously with both methods.
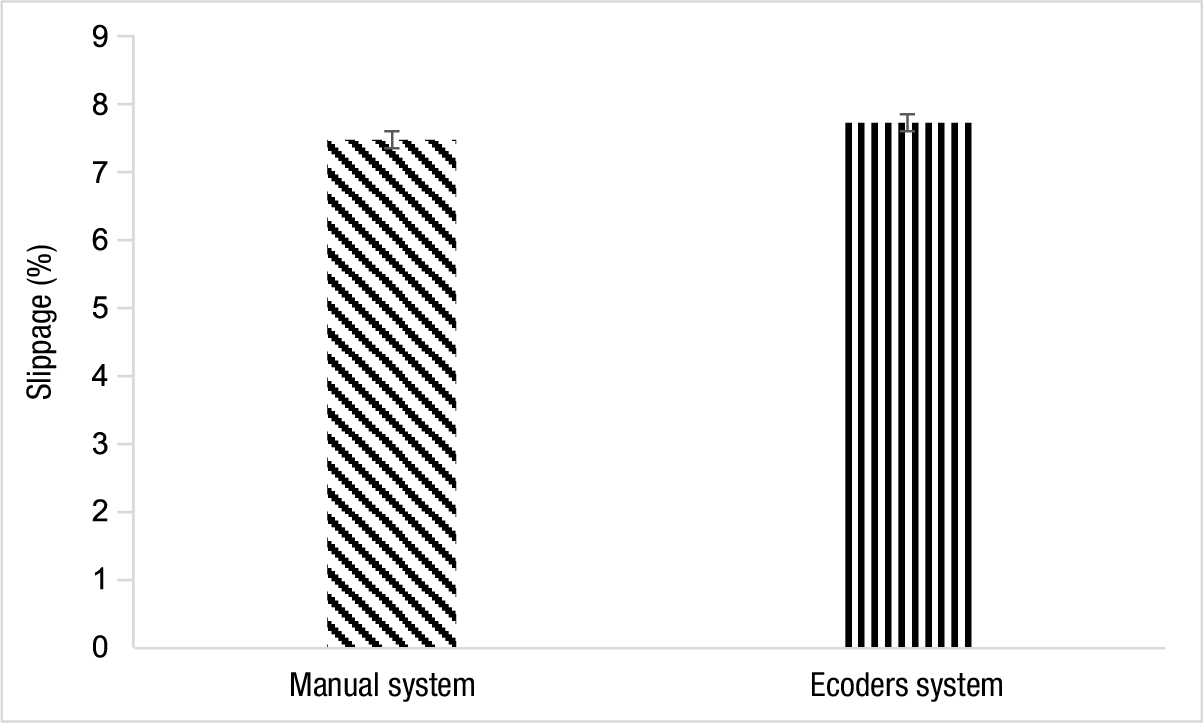
The encoder-based method is more efficient than the standard manual method. According to Pranav et al. (2010), an acceptable error in slippage measurement is approximately ± 2 %. Therefore, if the manual method is considered as a reference, the values calculated with the encoder-based method are within this tolerance, since the mean of slippage of all runs with the manual method is 7.5 %, and with the encoder-based method it is 7.75 %, which gives an average difference of 0.25 %.
Evaluation of an encoder-based system at different soil moisture content
Figure 6 shows the results of the field experiment. As the moisture content of the soil increases, slippage values are higher. At the highest moisture content, the maximum slippage threshold allowed for field operations, which is 15 %, is shown. These results are consistent with those reported by Amponsah et al. (2014) and Mamkagh (2019).
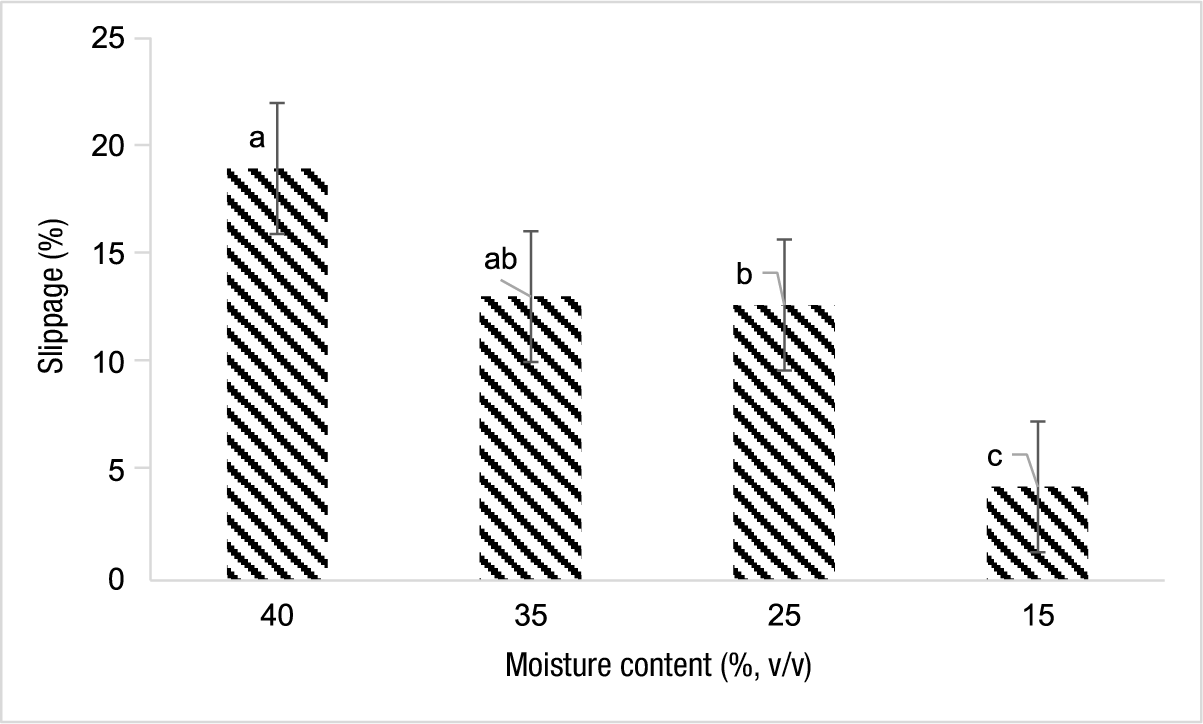
Significant statistical differences resulted among the different soil moisture contents (Figure 6), which confirms that the measurements of distances and the calculations of slippage with the encoder-based system are reliable. Similar results and trends were reported by Tayel et al. (2015) when measuring slippage.
Conclusions
The system designed, assembled and evaluated for measuring slippage in agricultural tractors is reliable. The values of slippage found by using the reference manual method and the method based on encoders have very small differences, which are within the error allowed for slippage measurements.
The results of field evaluation of the system were consistent with the type of implement and working depth, the heavier the implement and the more working depth corresponded to more slippage. The same occurred with soil moisture content, where higher slippage was recorded as moisture increased. This indicates that the measurement of distances by wheel turns and the calculation of the percentage of slippage are correct.
The slippage measurement encoder-based system is reliable for automatically measuring the slippage of agricultural tractor under different field conditions. Because the values of slippage are inline, the next step is to integrate a system that uses the values to control variables such as working depth or drive tire pressure.

